
Modeling and Stability Analysis for the Vibrating Motion of Three Degrees-of-Freedom Dynamical System Near Resonance


Abstract
:1. Introduction
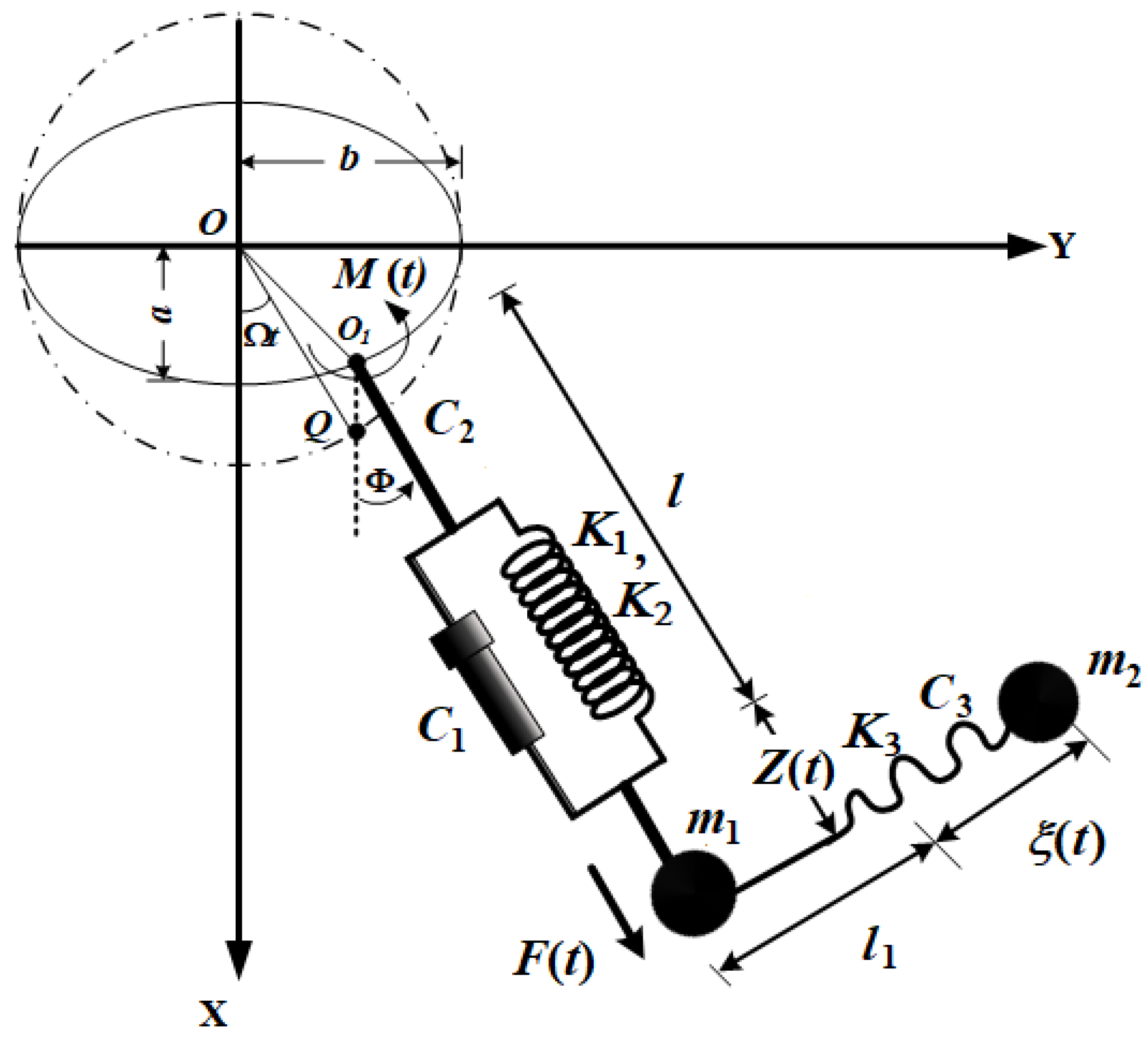
2. Description of the Vibrating System
3. The Desired Solutions
4. Resonance Categorizes and Modulation Equations (ME)
5. Steady state Solutions
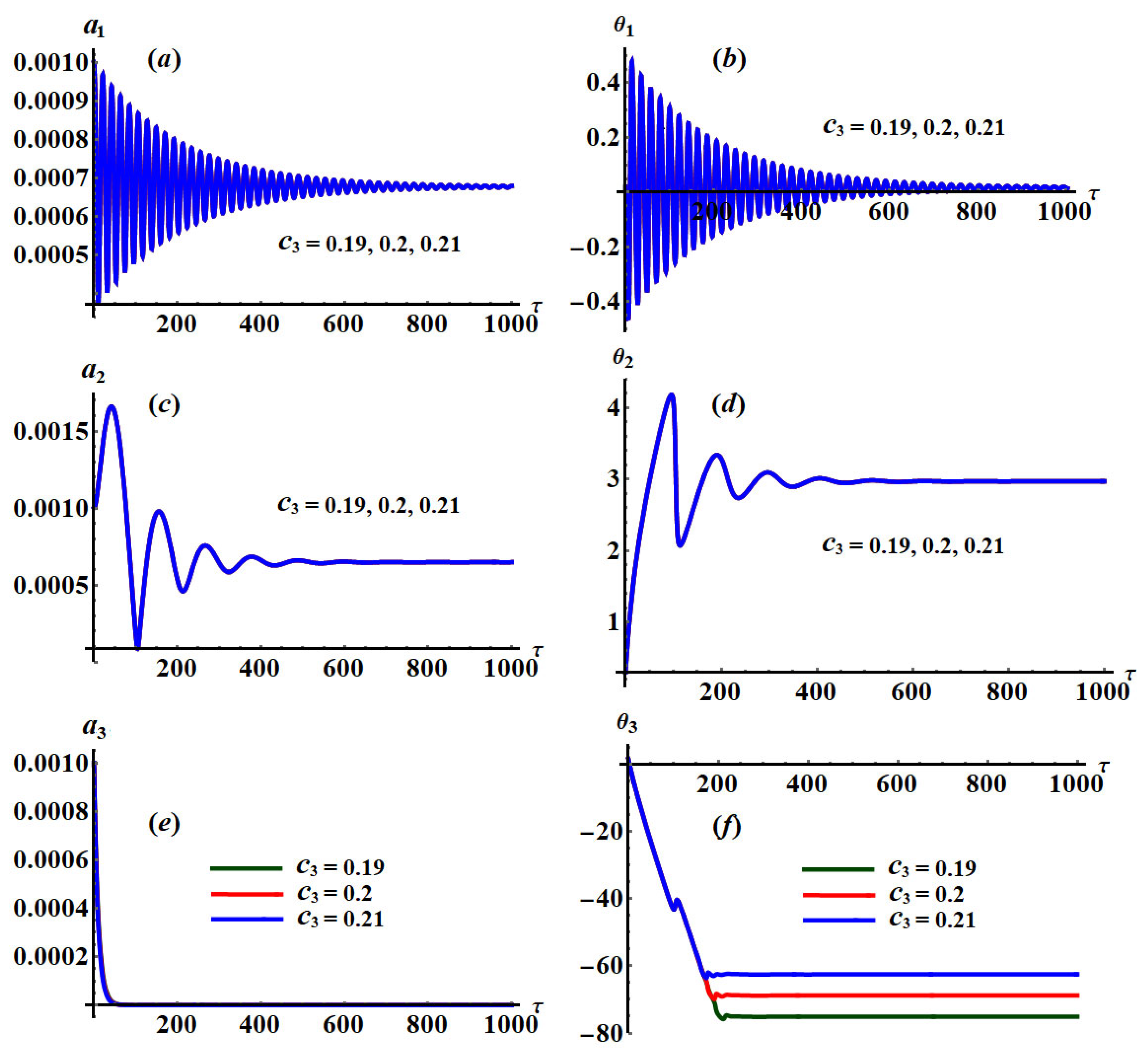
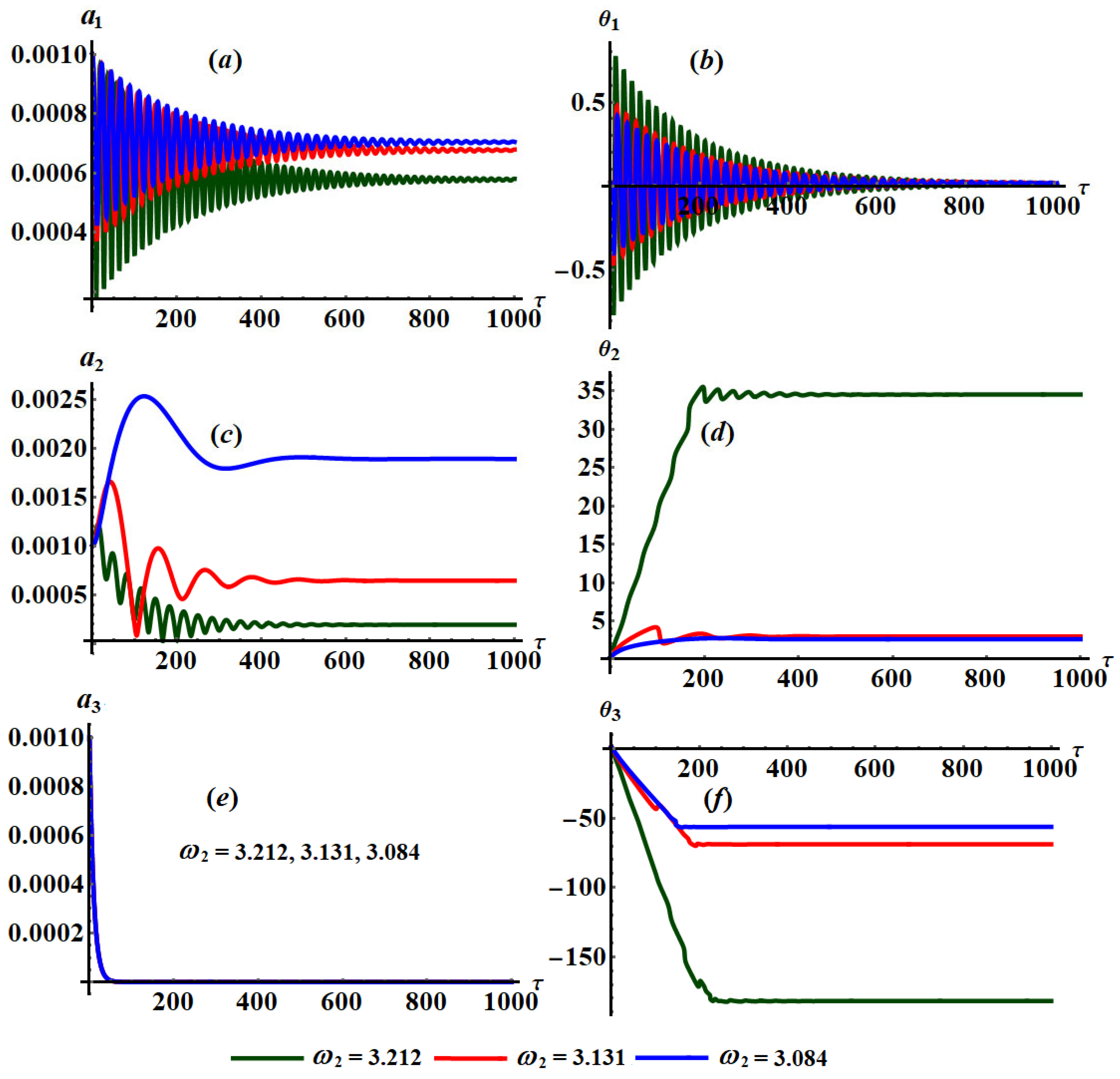
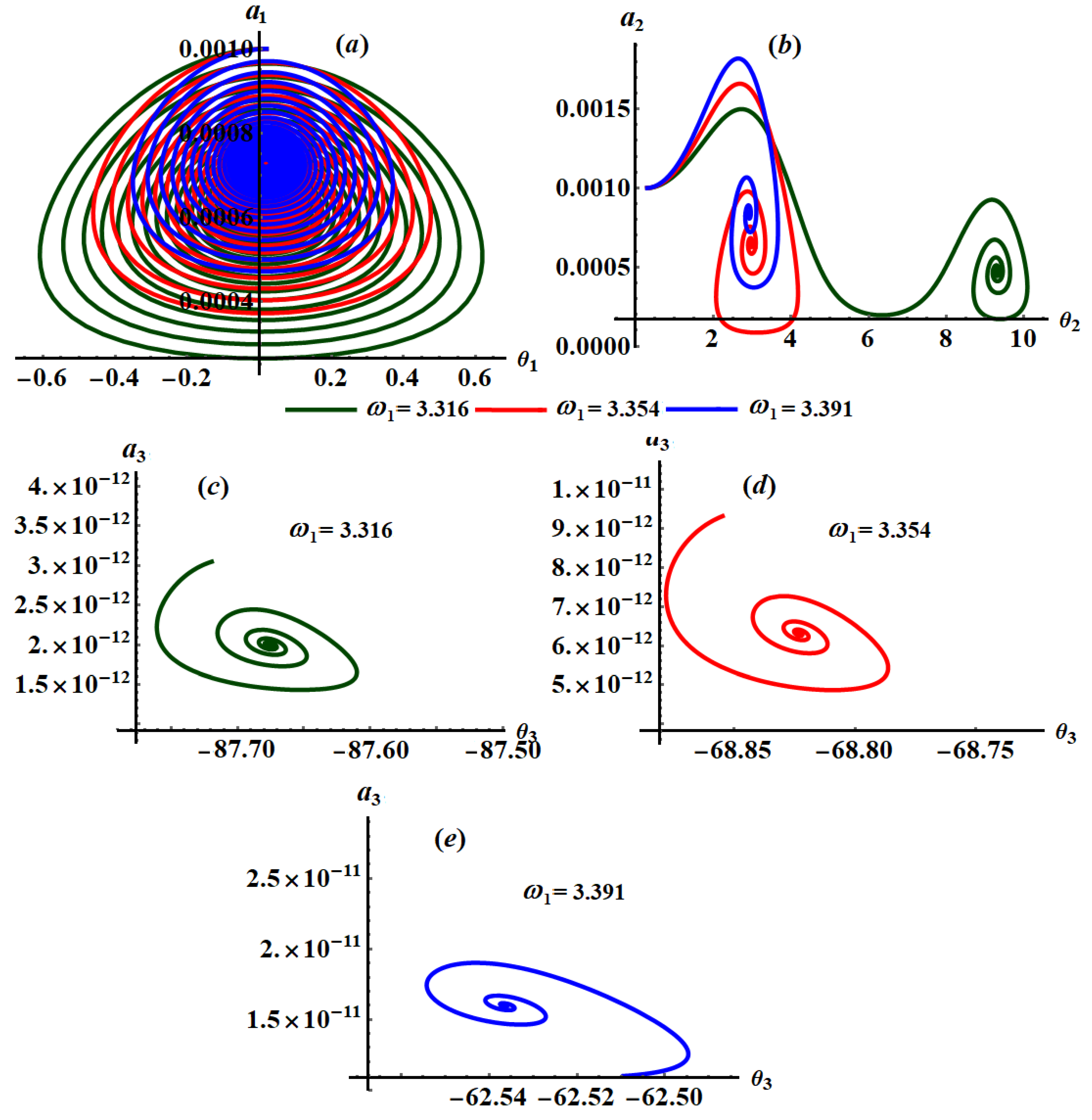
6. The Stability Analysis
7. Non-Linear Interpretations
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Thomson, W. Theory of Vibration with Applications, 5th ed.; Prentice Hall: Hoboken, NJ, USA, 1998. [Google Scholar]
- Wu, S. Active pendulum vibration absorbers with a spinning support. J. Sound Vib. 2009, 323, 1–16. [Google Scholar] [CrossRef]
- Eissa, M.; Kamel, M.; El-sayed, A.T. Vibration reduction of a nonlinear spring pendulum under multi external and parametric excitations via a longitudinal absorber. Meccanica 2011, 46, 325–340. [Google Scholar] [CrossRef]
- EL-Sayed, A.T.; Kamel, M.; Eissa, M. Vibration reduction of a pitch-roll ship model with longitudinal and transverse absorbers under multi excitations. Math. Comput. Model. 2010, 52, 1877–1898. [Google Scholar] [CrossRef]
- Eissa, M.; Kamel, M.; El-Sayed, A.T. Vibration reduction of multi-parametric excited spring pendulum via a transversally tuned absorber. Nonlinear Dyn. 2010, 61, 109–121. [Google Scholar] [CrossRef]
- Wu, S.; Siao, P. Auto-tuning of a two-degree-of-freedom rotational pendulum absorber. J. Sound Vib. 2012, 331, 3020–3034. [Google Scholar] [CrossRef]
- Nayfeh, H. Perturbation Methods; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Amer, W.S.; Bek, M.A.; Abohamer, M.K. On the motion of a pendulum attached with tuned absorber near resonances. Results Phys. 2018, 11, 291–301. [Google Scholar] [CrossRef]
- Amer, T.S.; Bek, M.A.; Hassan, S.S. Sherif Elbendary, The stability analysis for the motion of a nonlinear damped vibrating dynamical system with three-degrees-of-freedom. Results Phys. 2021, 28, 104561. [Google Scholar] [CrossRef]
- Awrejcewicz, J.; Starosta, R.; Kaminska, G. Asymptotic analysis of resonances in nonlinear vibrations of the 3-dof pendulum. Differ. Equ. Dyn. Syst. 2013, 21, 123–140. [Google Scholar] [CrossRef]
- Amer, T.S.; Bek, M.A. Chaotic responses of a harmonically excited spring pendulum moving in circular path. Nonlinear Anal. RWA 2009, 10, 3196–3202. [Google Scholar] [CrossRef]
- Starosta, R.; Kaminska, G.S.; Awrejcewicz, J. Parametric and external resonances in kinematically and externally excited nonlinear spring pendulum. Int. J. Bifurcat. Chaos 2011, 21, 3013–3021. [Google Scholar] [CrossRef]
- Starosta, R.; Kamińska, G.S.; Awrejcewicz, J. Asymptotic analysis of kinematically excited dynamical systems near resonances. Nonlinear Dyn. 2012, 68, 459–469. [Google Scholar] [CrossRef]
- El-Sabaa, F.M.; Amer, T.S.; Gad, H.M.; Bek, M.A. On the motion of a damped rigid body near resonances under the influence of harmonically external force and moments. Results Phys. 2020, 19, 103352. [Google Scholar] [CrossRef]
- Abady, I.M.; Amer, T.S.; Gad, H.M.; Bek, M.A. The asymptotic analysis and stability of 3DOF non-linear damped rigid body pendulum near resonance. Ain Shams Eng. J. 2021. [Google Scholar] [CrossRef]
- Amer, T.S.; Bek, M.A.; Abouhmr, M.K. On the vibrational analysis for the motion of a harmonically damped rigid body pendulum. Nonlinear Dyn. 2018, 91, 2485–2502. [Google Scholar] [CrossRef]
- Amer, T.S.; Bek, M.A.; Abohamer, M.K. On the motion of a harmonically excited damped spring pendulum in an elliptic path. Mech. Res. Commu. 2019, 95, 23–34. [Google Scholar] [CrossRef]
- Bek, M.A.; Amer, T.S.; Almahalawy, A.; Elameer, A.S. The asymptotic analysis for the motion of 3DOF dynamical system close to resonances. Alex. Eng. J. 2021, 60, 3539–3551. [Google Scholar] [CrossRef]
- Amer, T.S.; Bek, M.A.; Hassan, S.S. The dynamical analysis for the motion of a harmonically two degrees of freedom damped spring pendulum in an elliptic trajectory. Alex. Eng. J. 2021, 61, 1715–1733. [Google Scholar] [CrossRef]
- Tondl, A.; Nabergoj, R. Dynamic absorbers for an externally excited pendulum. J. Sound Vib. 2000, 234, 611–624. [Google Scholar] [CrossRef]
- Song, Y.; Sato, H.; Iwata, Y.; Komatsuzaki, T. The response of a dynamic vibration absorber system with a parametrically excited pendulum. J. Sound Vib. 2003, 259, 747–759. [Google Scholar] [CrossRef]
- Zhu, S.J.; Zheng, Y.F.; Fu, Y.M. Analysis of non-linear dynamics of a two-degree-of-freedom vibration system with non-linear damping and non-linear spring. J. Sound Vib. 2004, 27, 115–124. [Google Scholar] [CrossRef]
- Kecik, K.; Kapitaniak, M. Parametric analysis of magnetorheologically damped pendulum vibration absorber. Int. J. Struct. Stab. Dyn. 2014, 14, 1–13. [Google Scholar] [CrossRef]
- Kecik, K. Dynamics and control of an active pendulum system. Int. J. Non-Linear Mech. 2015, 70, 63–72. [Google Scholar] [CrossRef]
- Kecik, K. Assessment of energy harvesting and vibration mitigation of a pendulum dynamic absorber. Mech. Syst. Signal Process. 2018, 106, 198–209. [Google Scholar] [CrossRef]
- Kecik, K.; Mitura, A. Theoretical and experimental investigations of a pseudo-magnetic levitation system for energy harvesting. Sensors 2020, 20, 1623. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kecik, K. Simultaneous vibration mitigation and energy harvesting from a pendulum-type absorber. Commun. Nonlinear Sci. Numer. Simulat. 2021, 92, 105479. [Google Scholar] [CrossRef]
- Djebali, S.; Aoun, A.G. Resonant fractional differential equations with multi-point boundary conditions on (0,+ꝏ). J. Nonlinear Funct. Anal. 2019, 2019, 1–15. [Google Scholar]
- Reich, S.; Zaslavski, A.J. Asymptotic behavior of a dynamical system on a metric space. J. Nonlinear Var. Anal. 2019, 3, 79–85. [Google Scholar]
- Awrejcewicz, J. Classical Mechanics: Kinematics and Statics; Springer: New York, NY, USA, 2012. [Google Scholar]
- Abohamer, M.K.; Awrejcewicz, J.; Starosta, R.; Amer, T.S.; Bek, M.A. Influence of the motion of a spring pendulum on energy-harvesting devices. Appl. Sci. 2021, 11, 8658. [Google Scholar] [CrossRef]
- Bek, M.A.; Amer, T.S.; Sirwah, M.A.; Awrejcewicz, J.; Arab, A.A. The vibrational motion of a spring pendulum in a fluid flow. Results Phys. 2020, 19, 103465. [Google Scholar] [CrossRef]
- Amer, T.S.; Galal, A.A.; Abolila, A.F. On the motion of a triple pendulum system under the influence of excitation force and torque. Kuwait J. Sci. 2021, 48, 1–17. [Google Scholar] [CrossRef]
- Amer, T.S.; Starosta, R.; Elameer, A.S.; Bek, M.A. Analyzing the stability for the motion of an unstretched double pendulum near resonance. Appl. Sci. 2021, 11, 9520. [Google Scholar] [CrossRef]
- Amer, W.S.; Amer, T.S.; Starosta, R.; Bek, M.A. Resonance in the cart-pendulum system-an asymptotic approach. Appl. Sci. 2021, 11, 11567. [Google Scholar] [CrossRef]





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amer, W.S.; Amer, T.S.; Hassan, S.S. Modeling and Stability Analysis for the Vibrating Motion of Three Degrees-of-Freedom Dynamical System Near Resonance. Appl. Sci. 2021, 11, 11943. https://doi.org/10.3390/app112411943
Amer WS, Amer TS, Hassan SS. Modeling and Stability Analysis for the Vibrating Motion of Three Degrees-of-Freedom Dynamical System Near Resonance. Applied Sciences. 2021; 11(24):11943. https://doi.org/10.3390/app112411943
Chicago/Turabian StyleAmer, Wael S., Tarek S. Amer, and Seham S. Hassan. 2021. "Modeling and Stability Analysis for the Vibrating Motion of Three Degrees-of-Freedom Dynamical System Near Resonance" Applied Sciences 11, no. 24: 11943. https://doi.org/10.3390/app112411943