1. Introduction
As a potential new space transportation system for transporting the payload to outer space, the main structure of the space elevator system mainly consists of four parts: ground anchor point, rope, climber and zenith anchor. The whole system relies on the centrifugal force generated by the rotation of the earth to keep the system stable and transport the payload through the climber.
The concept originated from the invention of Tsiolkovsky, and was cemented in engineering terms by Pearson [
1]. It was not possible to obtain the desired strength of the tether material until the discovery of carbon nanotubes [
2]. At the end of the 20th century, NASA established a research group led by Dr. Edward and demonstrated the feasibility of the space elevator system [
3]. To fully understand the potential commercial application of space elevator, the International Space Elevator Association (ISEC) introduced the concept of Galaxy port [
4]. Through the life cycle assessment of the space elevator, Harris [
5] found that the design of the space elevator is an environmentally and economically sustainable choice for rail transportation. Shi [
6] studied the dynamics of a partial space elevator system with multiple climbers and applied the optimal control to develop optimal operation modes to suppress the liberation of the partial space elevator.
Pearson [
1] established the continuous static model of a rope element based on differential equations, and first deduced the gradual function model of the rope’s cross-sectional area. However, the elasticity of the rope was not considered, so Aravind [
7] and Cohen [
8] established the system static equilibrium equation considering the rope elasticity on the basis of Pearson, deduced the cross-sectional area gradient function model of the equatorial space elevator elastic rope, and conducted relevant research on the system parameter of the gradient section space elevator system, which laid the foundation for the subsequent research on the dynamics of the space elevator system.
The rigid rod tether model has fewer degrees of freedom and simple analysis. Wang [
9] studied the stability characteristics of the space elevator system near the equilibrium point based on the small angle hypothesis through the rigid rod tether model. The chain rod model discretizes the continuous rope into a system composed of finite rigid rods or elastic rods [
10]. Woo [
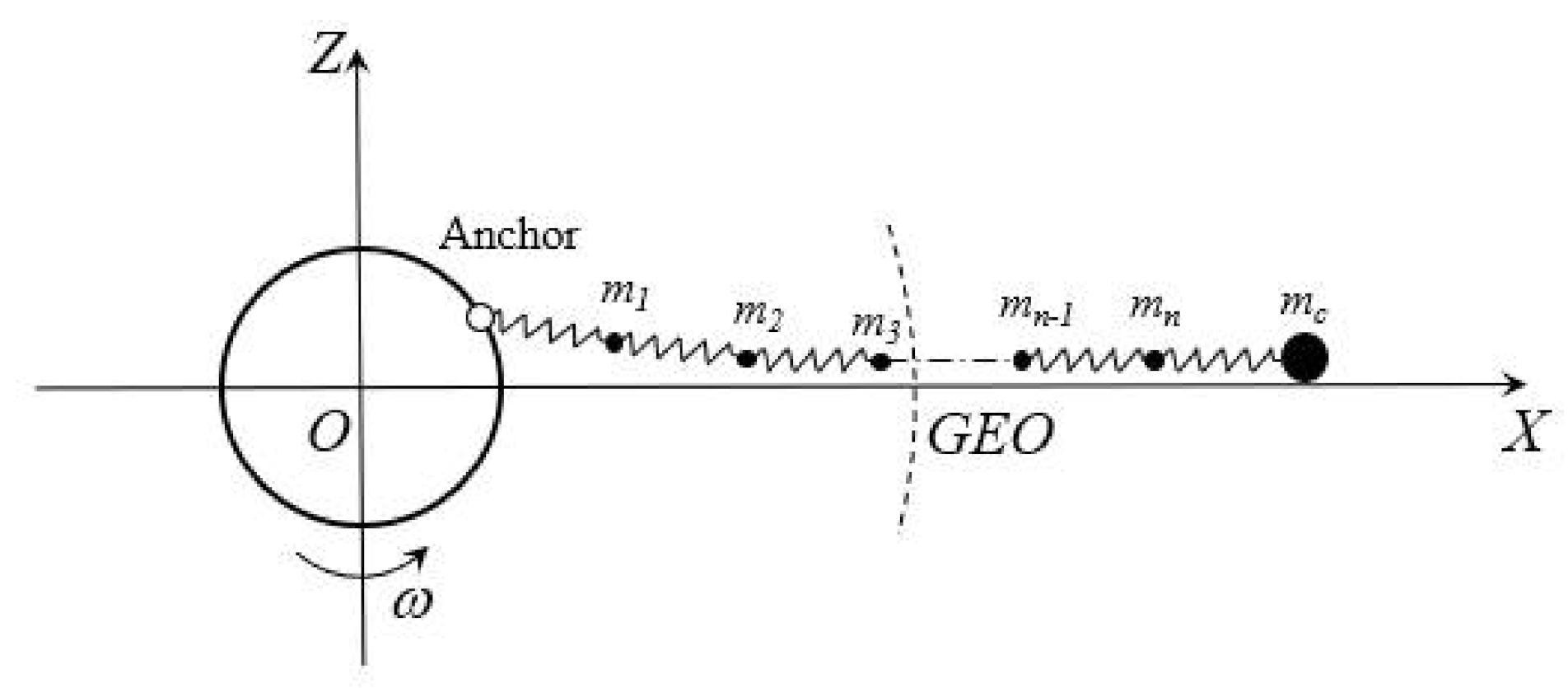
11] used the chain rod model to study the stress of some space elevator systems, and explored the influence of climbers on the vibration law of some space elevator systems. The lumped mass tether model discretizes the rope model into a series of mass points connected by spring dampers, simulates the axial stiffness of the rope through the elasticity of the spring, and reflects the flexibility of the rope with the rotation angle of the adjacent spring. Based on the lumped mass tether model, Williams [
12] studied the vibration influence of the climber on the space elevator system, proposed the relevant control strategy, and carried out the modal analysis of the system. Wang [
13] carried out a dynamic modeling of deployment latitude based on the “chain-bar” tether model and lumped mass tether model, respectively, and studied the deployable latitude range of non-equatorial space elevator system.
Neither the “chain-bar” nor the lumped mass tether model can truly reflect the constitutive mechanical characteristics of the flexible rope, and cannot accurately describe the large deformation movement of the flexible rope. A high number of elements is necessary to ensure the accuracy of the model; thus, the simulation calculation is inefficient. Shabana [
14] proposed the absolute nodal coordinate formulation (ANCF), which is based on the theory of continuum mechanics and mainly solves the dynamics of large deformation flexible bodies. The ANCF uses position vector and derivative to describe the element nodes, which can avoid the limitation of the small rotation angle in the traditional finite element method, and describe arbitrary translation, rotation and deformation [
15]. The mass matrix in ANCF is constant, and there are no centrifugal force terms and Coriolis force terms in the dynamic equation, which further simplifies the numerical calculation [
16]. ANCF was employed to establish the dynamics model of space tether in new applications due to its ability to describe the nonlinearity and large deformation of the tether [
17], including the effects of solar wind on an electric sail (E-sail) [
18], deployment dynamics and debris capture of tethered space net [
19], and tethered spacecraft formation [
20]. The ANCF method has also been applied to the dynamics of tethered satellites and partial space elevators [
21,
22,
23].
It is necessary to accurately obtain the space elevator system’s mechanical properties for its design and construction. The mechanical model established for analysis needs to be as close to the actual situation as possible. Most of the existing mechanical models are based on the “chain-bar” and lumped mass tether model, which cannot effectively reflect the flexible behavior of the rope of space elevator system. Thus, in this paper, the ANCF method will be applied to the calculation of the space elevator system, in order to describe the rope flexibility of the space elevator system.
2. Tether Modelling
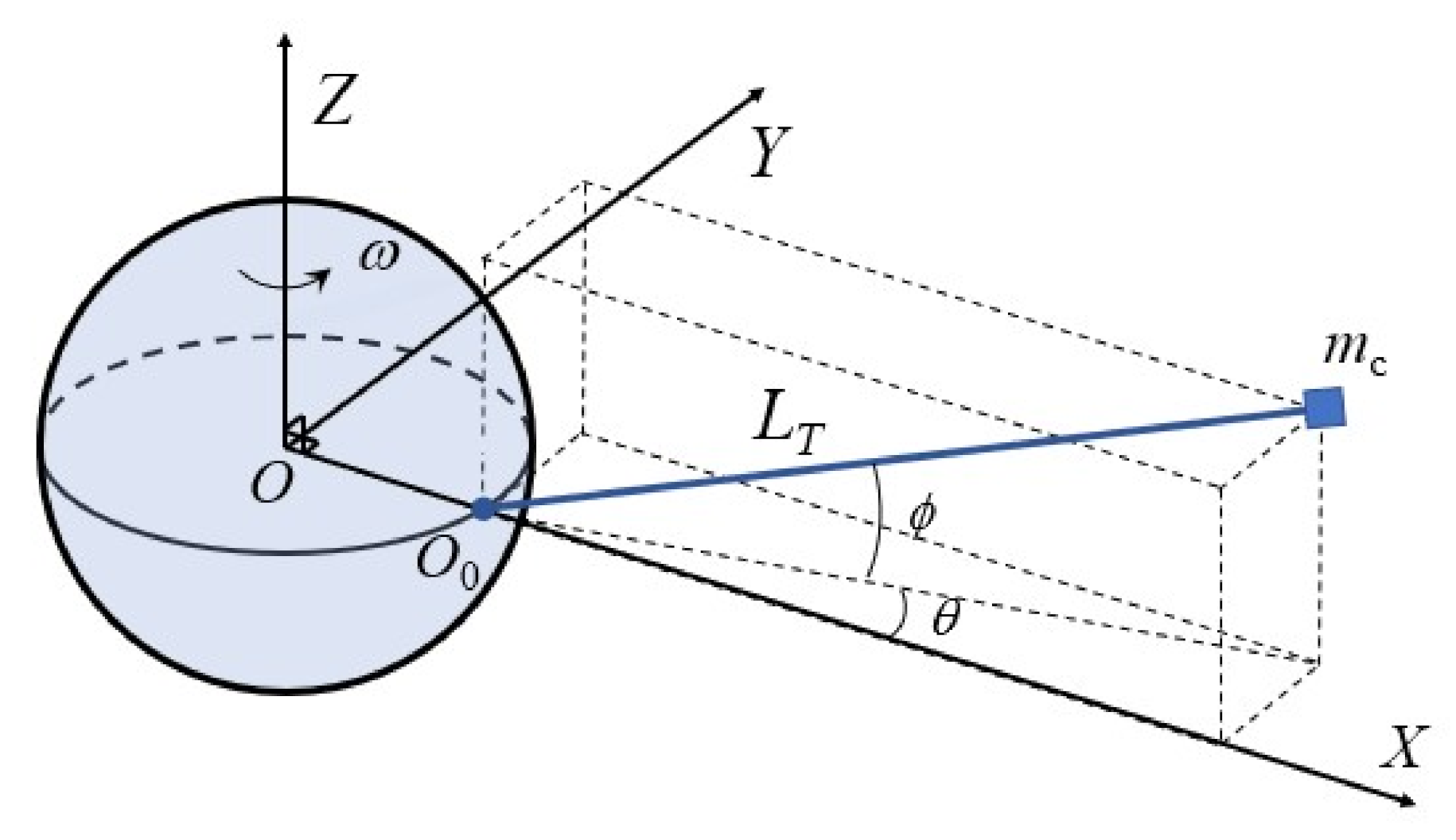
The typical space elevator system model comprises a tether, climbers and a zenith anchor. It can be considered that the anchor point of the tether is at a fixed location while the system oscillation has little impact on the floating platform. The centrifugal force would pull the tether perpendicular to the Earth’s axis while the tether would also droop toward the equator owing to gravity, which points to the center of the Earth. The space elevator system model is depicted in
Figure 1. The center of the Earth
O is assumed to be inertially fixed and is used as the origin of the inertial frame.
is the anchor point of the tether on the earth’s equator. The
X axis points from point
O to point
and is perpendicular to the ground. The
Z axis points to the North Pole along the Earth’s rotation axis. The
Y axis is perpendicular to the
X axis and
Z axis,
is the angular velocity of the system is equal to the rotation rate of the Earth.
is the nominal (unstressed) length of the tether.
is the mass of the counterweight at the end of the tether.
is the angle between the projection of the rope of the space elevator system in the
XY plane and the
X axis.
is the angle between the projection of the rope of the space elevator system in the
XY plane and itself.
The rope of the space elevator system is a kind of slender flexible body, in which the scale of one dimension (length) is much larger than the other two dimensions (section), so it can be modeled based on beam element. ANCF beam elements can generally be divided into two categories. The first one is the beam element without considering the transverse shear effect. This kind of element describes the displacement and deformation field of the beam through the node position coordinates and their longitudinal derivatives. Due to the lack of transverse derivatives, it is usually called the gradient default beam element. The other one is the beam element considering the transverse shear effect. This kind of element introduces the transverse derivative of the node; thus, the section can be deformed. The section size of the rope of the space elevator system is much smaller than the length, so the shear effect can be ignored. In this paper, a flexible rope model is established based on the rope beam element with gradient default beam element.
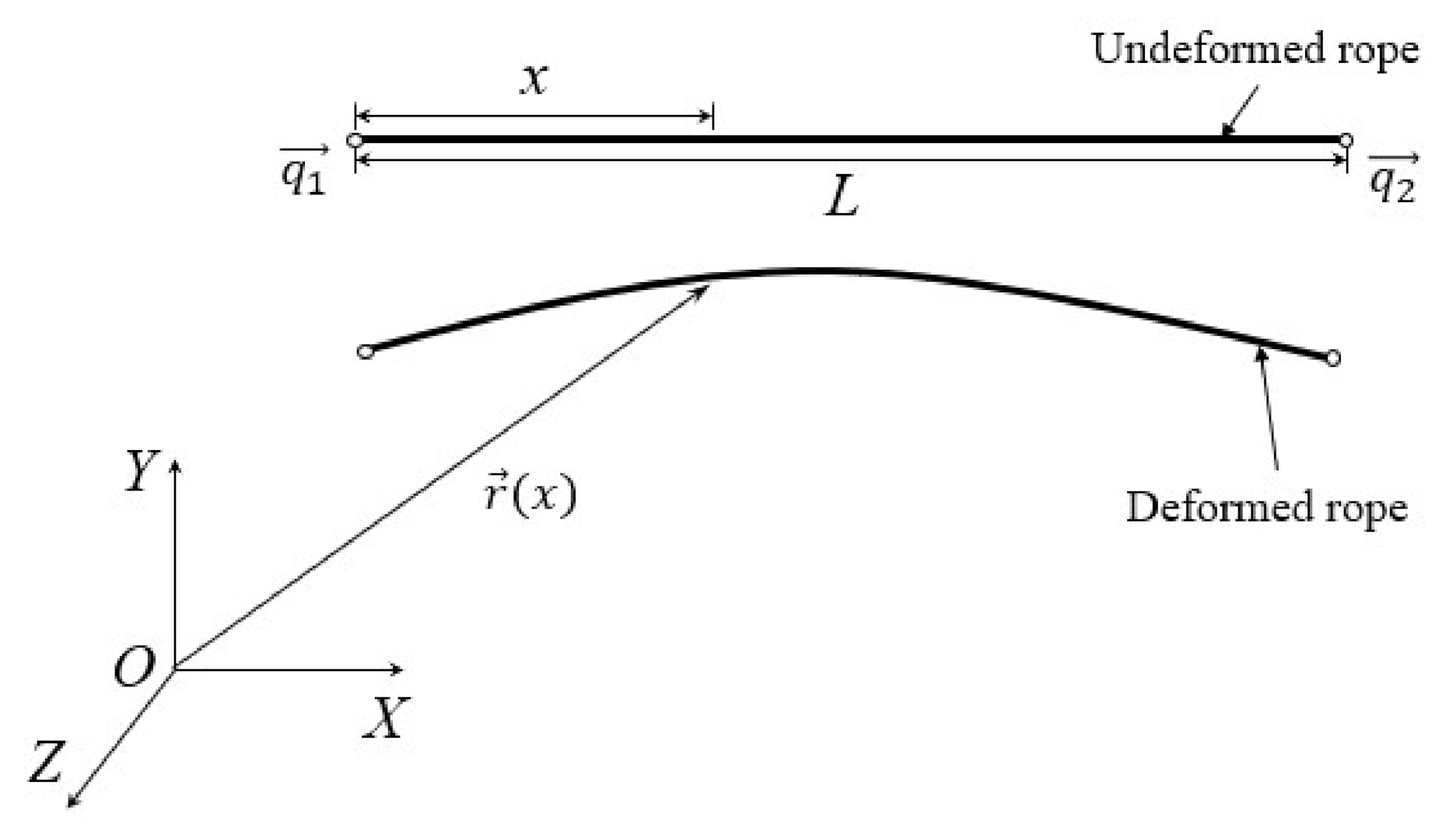
The model of ANCF rope element is shown in
Figure 2.
is the absolute coordinate system of space.
L is the length of the rope element.
x is the coordinate of the element in the length direction.
and
are the generalized coordinates of the two nodes of the rope element.
is the absolute coordinate of the point on the element, whose element coordinate is
x.
The node coordinates of the gradient default rope beam element are composed of the node position and its derivative to the axial element coordinates. For a three-dimensional two node element with length
L, the node coordinates can be expressed as:
The displacement field function of the element can be obtained by cubic Hermite interpolation of the node coor dinates of the element:
where
is the interpolation basis function, that is, the element shape function, expressed as follows:
where
is third order identity matrix, and
can be presented as:
where
.
As shown in Equation (
2), the shape function and node coordinates only depend on the element coordinates and time variables, respectively, so the element displacement derivative, velocity and acceleration are expressed as follows:
For a rope element with cross-sectional area
A and density
, its kinetic energy is:
where
is the element mass matrix, which can be presented as:
It can be seen from the displacement field function of the element that the axial and bending deformation are considered in the element. The axial strain
and curvature
can be presented as:
According to Euler Bernoulli beam theory, the element strain energy can be presented as:
where
E and
J are the Young’s modulus and the section moment of inertia of the element material.
The generalized elastic force of the element can be obtained by calculating the partial derivative of the strain energy in Equation (
10) with respect to the generalized coordinate:
The generalized structural force is composed of universal gravitation and centrifugal force. As shown in
Figure 1, there is no difference between the perturbation of universal gravitation in the
XY plane or
XZ plane, but the centrifugal force is different in the
XY plane and the
XZ plane. This is because the calculation of universal gravitation depends on the distance between the particle and the earth’s center, while centrifugal force depends on the distance between the particle and the earth’s rotation axis. As a result, the
z component in
has no contribution to centrifugal force, a transformation matrix
is set to calculate centrifugal force, which can be presented as:
The gravitational force
and centrifugal force
with the element coordinate
x can be expressed as:
where
is the gravitational constant, and the point mass
.
For objects with mass
in the geostationary orbit, the gravitational force is equal to the centrifugal force, and we can obtain:
where
is the geosynchronous orbit radius.
can be taken from Equation (
15) and integrate Equation (
13), Equation (
14) along the length of the element to obtain:
Then, for an element with constant density
and a cross-sectional area
A, the generalized structural force
can be shown as:
The external forces acting on the rope mainly include concentrated load and distributed load. The generalized force of the concentrated load
acting on
can be presented as:
The generalized force of distributed load
can be presented as:
The system mass matrix
can be assembled from the mass matrix of each element using the same method as the finite element method. The system kinetic energy is shown as:
where
is the generalized coordinate vector composed of the coordinates
of each node.
The assemblies of the generalized force , , and are slightly simpler, because they are one-dimensional vectors.
As a result of the use of generalized coordinates to describe the dynamical state of rope elements, the dynamic model of steel cable capture mechanism, which is a constrained multi-body system, can be expressed by a unified system equation (differential-algebraic equation) on the basis of the Lagrange equation:
In the static calculation, the quantity related to the time derivative in the dynamic equation can be directly eliminated, and the dynamic equation degenerates into:
The setting of the boundary conditions is also the same as the finite element method. The initial value
of each node is shown as:
where
is the absolute coordinate of
X-axis of the node.
Since the rope is fixed at the anchor point, the 6-degrees-of-freedom of anchor point node is set to 0, and (the number of nodes − 1) × 6 equations can be obtained. Let
The Jacobian matrix of
should be obtained by numerical methods for the complicated expression of the generalized elastic force; then, the generalized coordinates
can be solved by the Newton Raphson iterative method, and the absolute coordinates of each node can be obtained by Equation (
2).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}