
Vibration Responses of a Coaxial Dual-Rotor System with Supporting Misalignment


Abstract
:1. Introduction
2. Modeling of a Dual-Rotor System with Supporting Misalignment
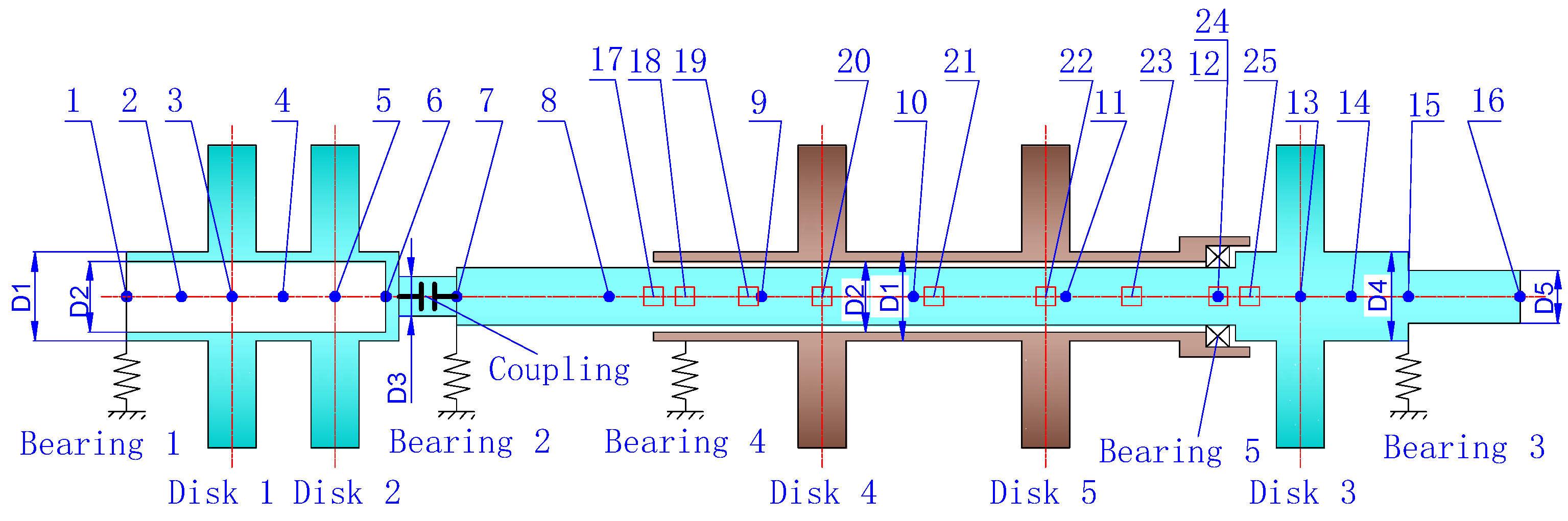
2.1. Model of a Dual-Rotor System
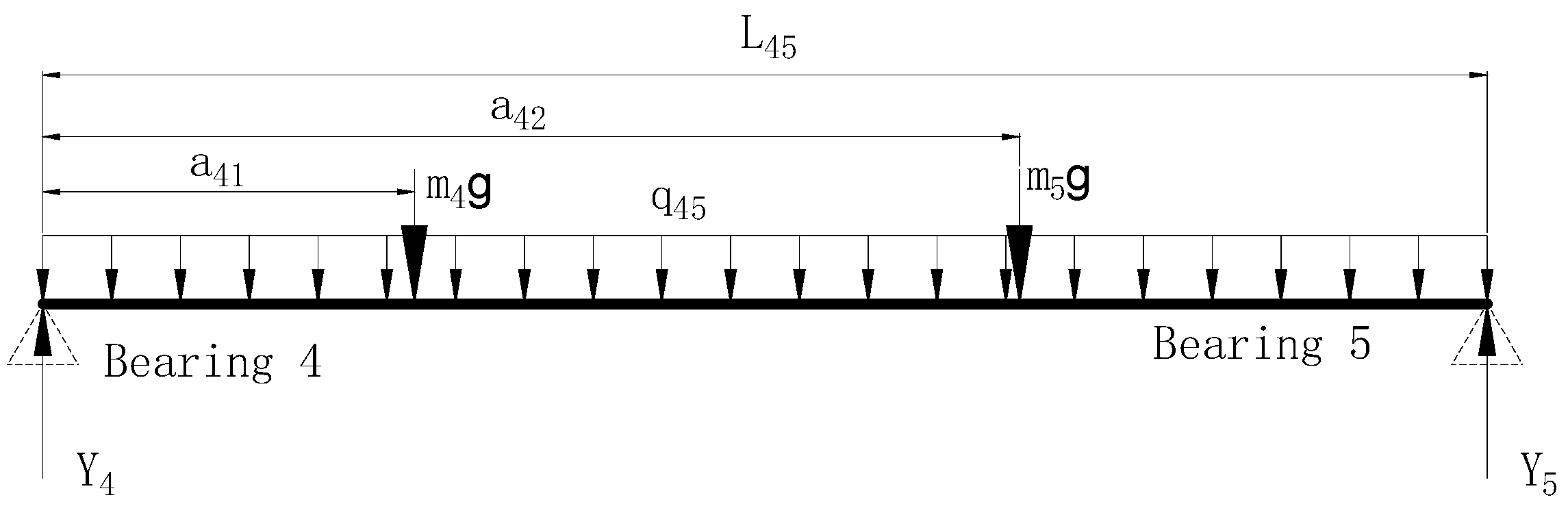
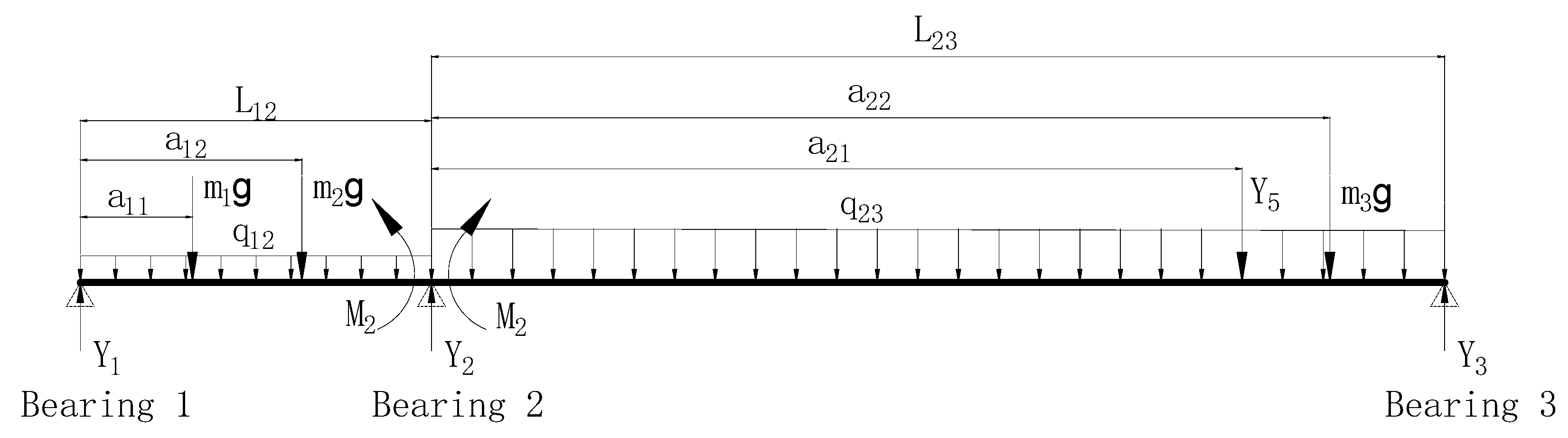
2.2. Bearing Load Caused by Misalignment
- (1)
- Bearing Load of the Outer Rotor
- (2)
- Bearing Load of the Inner Rotor
- (3)
- Dynamic Bearing Load Caused by Misalignment
3. Simulation and Discussions
3.1. Effects of Supporting Misalignment at Bearing 1
3.2. Effects of Supporting Misalignment at Bearing 3
3.3. Effects of Bearing Damping
3.4. Effects of the Coefficient of the Harmonic Component
4. Experimental Study of Bearing Supporting Misalignment
4.1. Supporting Misalignment at Bearing 1
4.2. Supporting Misalignment at Bearing 3
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wen, B.G.; Wang, M.L.; Han, Q.K.; Yu, C.X. Effect of Ball Bearing Misalignment on Dynamic Characteristics of Rotor System. In Proceedings of the Fourth Chinese International Turbomachinery Conference, Nanchang, China, 30 October–2 November 2020. [Google Scholar] [CrossRef]
- Desouki, M.; Sassi, S.; Renno, J.; Gowid, S.A. Dynamic Response of a Rotating Assembly under the Coupled Effects of Misalignment and Imbalance. Shock Vib. 2020, 2020, 8819676. [Google Scholar] [CrossRef]
- Fan, W.; Lu, H.; Zhang, Y.; Su, X. Dynamic Characteristics of Gear Coupling and Rotor System in Transmission Process Considering Misalignment and Tooth Contact Analysis. Processes 2020, 8, 1336. [Google Scholar] [CrossRef]
- Hu, Y.; Tan, A.C.; Liang, C.; Li, Y.P. Failure Analysis of Fractured Motor Bolts in High-speed Train Due to Cardan Shaft Misalignment. Eng. Fail. Anal. 2021, 122, 105246. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, H.; Zou, D.; Ta, N.; Rao, Z. Comparison Study of Misalignment Effect Along Two Perpendicular Directions on the Stability of Rigid Rotor-aerostatic Journal Bearing System. Proc. IME J. Eng. Tribol. 2020, 234, 1618–1634. [Google Scholar] [CrossRef]
- Abdou, K.M.; Saber, E. Effect of Rotor Misalignment on Stability of Journal Bearings with Finite Width. AEJ 2020, 59, 3407–3417. [Google Scholar] [CrossRef]
- Wang, M.; Wen, B.; Han, Q.; Sun, Y.; Yu, C. Dynamic Characteristics of a Misaligned Rigid Rotor System with Flexible Supports. Shock Vib. 2021, 2021, 8876190. [Google Scholar] [CrossRef]
- Ye, Z.; Chen, Z.; Lu, H.; Wang, S.; Li, z.; Yang, M.; Wu, W. Analysis of Parallel Misalignment of Gear Coupling in Rotor System Using EEMD-median Filter Method. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; pp. 1113–1118. [Google Scholar]
- Prainetr, S.; Tunyasrirut, S.; Wangnipparnto, S. Testing and Analysis Fault of Induction Motor for Case Study Misalignment Installation Using Current Signal with Energy Coefficient. World Electr. Veh. J. 2021, 12, 37. [Google Scholar] [CrossRef]
- Kim, J.J.; Sohn, H.S.; Choi, S.Y.; Hsu, W.T.; Ueda, O. Effect of Misalignment at 2nd Vane Endwall on Heat Transfer with Purge Flow. Int. J. Heat Mass Transf. 2021, 170, 121034. [Google Scholar] [CrossRef]
- Wu, K.; Liu, Z.; Ding, Q.; Shackleton, P. Vibration Responses of Rotor Systems in Diesel Multiple Units under Dynamic Spatial Misalignments and Base Motions. J. Sound Vib. 2021, 492, 115817. [Google Scholar] [CrossRef]
- Wu, K.; Liu, Z.; Ding, Q. Vibration Responses of Rotating Elastic Coupling with Dynamic Spatial Misalignment. Mech. Mach. Theor. 2020, 151, 103916. [Google Scholar] [CrossRef]
- Aggarwal, A.; Allafi, I.M.; Strangas, E.G.; Agapiou, J. Off-line Detection of Static Eccentricity of PMSM Robust to Machine Operating Temperature and Rotor Position Misalignment Using Incremental Inductance Approach. IEEE Trans. Transp. Electrif. 2021, 7, 161–169. [Google Scholar] [CrossRef]
- Kumar, P.; Tiwari, R. Finite Element Modelling, Analysis and Identification Using Novel Trial Misalignment Approach in an Unbalanced and Misaligned Flexible Rotor System Levitated By Active Magnetic Bearings. Mech. Syst. Signal Process. 2021, 152, 107454. [Google Scholar] [CrossRef]
- Kumar, P.; Tiwari, R. Development of a Novel Approach for Quantitative Estimation of Rotor Unbalance and Misalignment in a Rotor System Levitated By Active Magnetic Bearings. Iran. J. Sci. Technol. 2020, 45, 769–786. [Google Scholar] [CrossRef]
- Xu, X.; Feng, J.; Wang, H.; Zhang, N.; Wang, X. Dynamics Analysis of Misalignment and Stator Short-circuit Coupling Fault in Electric Vehicle Range Extender. Processes 2020, 8, 1037. [Google Scholar] [CrossRef]
- Wei, Y.; Liu, S.L. Numerical analysis of the dynamic behavior of a rotor-bearing-brush seal system with bristle interference. J. Mechan. Sci. Technol. 2019, 33, 3895–3903. [Google Scholar] [CrossRef]
- Han, Q.; Wang, T.; Ding, Z.; Xu, X.; Chu, F. Magnetic Equivalent Modeling of Stator Currents for Localized Fault Detection of Planetary Gearboxes Coupled to Electric Motors. IEEE Trans. Ind. Electron. 2021, 68, 2575–2586. [Google Scholar] [CrossRef]
- Lu, Z.Y.; Wang, X.D.; Hou, L.; Chen, Y.; Li, H. Dynamic Response Analysis for the Aero-engine Dual-rotor-bearing System with Flexible Coupling Misalignment Faults. J. Vibroeng. 2018, 20, 2012–2026. [Google Scholar] [CrossRef]
- Lu, K.; Jin, Y.; Huang, P.; Zhang, F.; Zhang, H.; Fu, C.; Chen, Y. The Applications of Pod Method in Dual Rotor-bearing Systems with Coupling Misalignment. Mech. Syst. Signal Process. 2021, 150, 107236. [Google Scholar] [CrossRef]
- Li, J.; Hong, J.; Ma, Y.H.; Zhang, D. Modelling of Misaligned Rotor Systems in Aero-engines. In Proceedings of the ASME 2012 International Mechanical Engineering Congress & Exposition, Houston, TX, USA, 9–15 November 2012; pp. 1–9. [Google Scholar]
- Wang, G.H.; Ma, Y.H.; Li, T.R.; Li, J.; Hong, J. Modelling of Misaligned Rotor System in Aero-engines and Interval Method Investigation. In Proceedings of the ASME 2013 International Mechanical Engineering Congress and Exposition, San Diego, CA, USA, 15–21 November 2013; pp. 1–8. [Google Scholar]
- Wang, C.; Ma, Y.H.; Zhang, D.Y.; Hong, J. Interval Analysis on Aero-engine Rotor System with Misalignment. In Proceedings of the ASME Turbo Expo 2015: Turbine Technical Conference and Exposition, Montreal, QC, Canada, 15–19 June 2015; American Society of Mechanical Engineers: Montreal, QC, Canada; pp. 1–9. [Google Scholar]
- Li, Z.; Jiang, J.; Tian, Z. Non-linear Vibration of an Angular-misaligned Rotor System with Uncertain Parameters. J. Vib. Contr. 2016, 22, 129–144. [Google Scholar]
- Ren, D.X.; Hong, J.; Wang, C. Research on Dynamic Model of Rotors with Bearing Misalignment. Appl. Mech. Mater. 2014, 3066, 3–8. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, L.; Li, X.; Yang, D.; Miao, J. Spectrum Analysis of a Coaxial Dual-rotor System with Coupling Misalignment. Shock Vib. 2020, 2020, 5856341. [Google Scholar] [CrossRef]
- Gibbons, C.B. Coupling Misalignment Forces. In Proceedings of the 5th Turbomachinery Symposium, Texas A & M University, College Station, TX, USA,, 12–13 October 1976; pp. 111–116. [Google Scholar]
- Sekhar, A.S.; Prabhu, B.S. Effects of Coupling Misalignment on Vibrations of Rotating Machinery. J. Sound. Vib. 1995, 185, 655–671. [Google Scholar] [CrossRef]
- Dalian, Y.; Fanyu, Z.; Jingjing, M.; Hongxian, Z.; Renjie, L.; Jie, T. Dual-rotor Misalignment Fault Quantitative Identification Based on DBN and Improved DS Evidence Theory. Mech. Ind. 2021, 22, 24. [Google Scholar] [CrossRef]
- Jin, Y.; Liu, Z.; Yang, Y.; Li, F.; Chen, Y. Nonlinear Vibrations of a Dual-rotor-bearing-coupling Misalignment System with Blade-casing Rubbing. J. Sound Vib. 2021, 497, 115948. [Google Scholar] [CrossRef]
- Xie, W.; Liu, C.; Wang, N.; Jiang, D. Numerical and Experimental Analysis of Rubbing–misalignment Mixed Fault in a Dual-rotor System. Proc. IME C J. Mech. Eng. Sci. 2020, 2147483647. [Google Scholar] [CrossRef]
- Chen, Q.; Yuan, Q.; Lei, M.; Wang, M. Shafting Alignment Computing Method of New Multibearing Rotor System under Specific Installation Requirement. Math. Probl. Eng. 2016, 2016, 1–12. [Google Scholar] [CrossRef]
- Yang, Z.J.; Peng, Z.J.; Kim, S.S. Bearing Load Distribution Studies in a Multi Bearing Rotor System and a Remote Computing Method Based on the Internet. KSME Int. J. 2004, 18, 946–954. [Google Scholar] [CrossRef]
- Hori, Y.; Uematsu, R. Influence of Misalignment of Support Journal Bearings on Stability of a Multi-rotor System. Tribol. Int. 1980, 13, 249–252. [Google Scholar] [CrossRef]
- Hu, W.; Miah, H.; Feng, N.; Hahn, E.J. A Rig for Testing Lateral Misalignment Effects in a Flexible Rotor Supported on Three Or More Hydrodynamic Journal Bearings. Tribol. Int. 2000, 33, 197–204. [Google Scholar] [CrossRef]
- Friswell, M.I.; Penny, J.E.T.; Garvey, S.D.; Lees, A.W. Dynamics of Rotating Machines; Cambridge University Press: Cambridge, UK, 2010; pp. 141–310. [Google Scholar]
- Ma, H.; Wang, X.L.; Niu, H.Q.; Wen, B. Oil-film Instability Simulation in an Overhung Rotor System with Flexible Coupling Misalignment. Arch. Appl. Mech. 2015, 85, 893–907. [Google Scholar] [CrossRef]
- Zhao, W.; Jing, J.P.; Meng, G.; Yang, Y.; Bai, H. Theoretical and Experimental Study on the Dynamic Response of Multi-disk Rotor System with Flexible Coupling Misalignment. Proc. IME C J. Mech. Eng. Sci. 2012, 226, 2874–2886. [Google Scholar]
- Prabhakar, S.; Sekhar, A.S.; Mohanty, A.R. Vibration Analysis of a Misaligned Rotor-coupling-bearing System Passing Through the Critical Speed. Proc. IME C J. Mech. Eng. Sci. 2001, 215, 1417–1428. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bearing | Kxx (MN/m) | Kyy (MN/m) | Cxx (Ns/m) | Cyy (Ns/m) | Specification |
|---|---|---|---|---|---|
| Bearing 1 | 2.21 | 2.651 | 200 | 200 | NU1013 |
| Bearing 2 | 14.5 | 17.4 | 200 | 200 | 7013AC |
| Bearing 3 | 2.21 | 2.651 | 200 | 200 | NU1013 |
| Bearing 4 | 9.29 | 11.148 | 200 | 200 | 7013AC |
| Bearing 5 | 25.1 | 25.1 | 200 | 200 | NU1013 |
| Parameters | D1 (m) | D2 (m) | D3 (m) | D4 (m) | D5 (m) |
|---|---|---|---|---|---|
| Values | 0.07 | 0.056 | 0.035 | 0.07 | 0.042 |
| Parameters | Diameter (m) | Thickness (m) | Elastic Modulus (Mpa) | Density (kg/m3) |
|---|---|---|---|---|
| Values | 0.24 | 0.038 | 2.06 × 105 | 7850 |
| Node | Position (m) | Remark | Node | Position (m) | Remark |
|---|---|---|---|---|---|
| 1 | 0.000 | Bearing 1 | 14 | 0.965 | |
| 2 | 0.043 | 15 | 1.010 | Bearing 3 | |
| 3 | 0.083 | Disk 1 | 16 | 1.098 | |
| 4 | 0.123 | 17 | 0.415 | ||
| 5 | 0.164 | Disk 2 | 18 | 0.440 | Bearing 4 |
| 6 | 0.204 | 19 | 0.490 | ||
| 7 | 0.260 | Bearing 2 | 20 | 0.548 | Disk 4 |
| 8 | 0.380 | 21 | 0.636 | ||
| 9 | 0.500 | 22 | 0.724 | Disk 5 | |
| 10 | 0.620 | 23 | 0.792 | ||
| 11 | 0.740 | 24 | 0.860 | Bearing 5 | |
| 12 | 0.860 | Bearing 5 | 25 | 0.885 | |
| 13 | 0.925 | Disk 3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Li, X.; Yang, D.; Jiang, L. Vibration Responses of a Coaxial Dual-Rotor System with Supporting Misalignment. Appl. Sci. 2021, 11, 11219. https://doi.org/10.3390/app112311219
Zhang H, Li X, Yang D, Jiang L. Vibration Responses of a Coaxial Dual-Rotor System with Supporting Misalignment. Applied Sciences. 2021; 11(23):11219. https://doi.org/10.3390/app112311219
Chicago/Turabian StyleZhang, Hongxian, Xuejun Li, Dalian Yang, and Lingli Jiang. 2021. "Vibration Responses of a Coaxial Dual-Rotor System with Supporting Misalignment" Applied Sciences 11, no. 23: 11219. https://doi.org/10.3390/app112311219