1. Introduction
Descriptor systems (also known as singular systems) play an important role in modern control theory, allowing us to model and analyze constrained dynamical systems [
1,
2,
3]. These restrictions can be naturally imposed on a system (as a consequence of physical laws, e.g., the law of conservation of energy) or determined by the engineer (e.g., the constrained area of work).
In the second half of the 20th century, many papers and monographs on descriptor systems were written, laying the foundations for this theory [
4,
5,
6,
7,
8,
9,
10,
11]. An overview of the state of the art in the field of descriptor systems theory can be found in [
1,
2,
3,
7]. The stability of such systems was examined in [
2,
3,
7,
12,
13]. Static and dynamic feedback control in descriptor systems was also investigated for state feedback [
2,
7,
14] and the output feedback [
2,
7,
15,
16,
17]. Descriptor systems theory can be used in many areas, such as electrical and mechanical engineering, robotics, fluid mechanics, chemical engineering, economics, and demography, see e.g., [
2,
4,
8,
18,
19,
20].
In recent years, the analysis and synthesis problems of dynamical systems described by fractional-order differential (or difference) equations have attracted a lot of attention [
3,
20,
21,
22,
23].
The notion of the practical stability of positive fractional discrete-time systems was introduced in [
24] and conditions for practical stability were provided in [
24,
25]. The stability of discrete-time linear systems with delays was investigated in [
26,
27].
Superstable systems are a subclass of asymptotically stable systems, in which dynamics are more restricted. Such systems provide some practically important properties, e.g., superstability (as opposed to stability) remains under the presence of time-varying and nonlinear perturbations, which allows researchers to solve problems relating to the synthesis of robust systems easily. Moreover, superstable systems ensure the elimination of peaks or sharp increases in the state vector trajectory [
28,
29,
30].
In this article, the superstabilizing state-feedback control problem in DDFL systems is studied. The main advantage of the presented approach is that it can be applied to the analysis of descriptor systems properties which are determined by matrix entries, such as positivity and superstability. This study is an extension of the results presented in [
31].
The organization of the paper is as follows. In
Section 2 the considered state-space model is introduced.
Section 3 is devoted to the application of the Drazin inverse to the analysis of DDFL systems. In
Section 4 an equivalent model of this class of dynamical systems is presented. Methods for investigating stability and superstability are given in
Section 5. In
Section 6 and
Section 7 descriptor systems with static and dynamic state-feedback are studied and procedures for the computation of the gain matrices such that the closed-loop system is superstable are given. A numerical example showing the efficacy of the discussed approach is presented in
Section 8. In
Section 9 some concluding remarks and open problems are provided.
The following system of symbols will be used in the paper: for the set of real numbers, for the set of real matrices, for the set of complex numbers, for the set of nonnegative integers, and for the identity matrix.
2. Considered State-Space Model
Let us consider the DDFL system in the form
where
is the state vector,
is the input vector,
,
and
is the Grünwald–Letnikov fractional-order backward difference defined by [
21]
where
In descriptor systems and therefore the matrix E is not invertible.
Definition 1. Let A, B be some matrices of the same size. A set of such matrices of the form is called a matrix pencil, where λ is a parameter. If A, B are square matrices and , then the pencil is called a regular one.
According to Definition 1 we distinguish two subclasses of descriptor systems:
- (1)
with the regular matrix pencil of the pair , i.e., for some ;
- (2)
with the singular matrix pencil of the pair , i.e., for some .
If the matrix pencil of the pair
is regular, then the solution of the state equation of a descriptor system exists and it is unique for any consistent initial condition [
2,
7].
There are several methods for analyzing the system (
1) with the regular matrix pencil, which are based on the Drazin inverse [
5], the Laurent series expansion [
9] and the Weierstrass–Kronecker decomposition [
11] methods.
3. Application of the Drazin Inverse
Let us assume that the matrix pencil of the pair
of the system (
1) is regular. As a consequence, we have
for some
. Premultiplication of (
1) by
yields
where
It is well known that premultiplication of a matrix equation by the nonsingular matrix does not change its solution. Therefore, both Equations (
1) and (
4) have the same solution
. The substitution of (
2) into (
4) yields
where
and
Observe that the values of the coefficients
determined by (
8) highly decrease for increasing
j. Therefore, in many cases the upper bound of the summation can be limited by some natural number
L, which is called the length of practical implementation [
24]. Hence, we can write Equation (
6) in the form
with
,
.
Definition 2 ([
3,
7]).
The Drazin inverse of , denoted by , is a matrix satisfying the following conditionswhere q is the index of , i.e., the smallest nonnegative integer such that Every square matrix has its own unique Drazin inverse [
3,
5,
7]. For a nonsingular matrix the Drazin inverse is equivalent to the standard matrix inverse. Some methods for the computation of the Drazin inverse can be found in [
3].
Lemma 1 ([
3,
7]).
The properties of the matrices and given by (5) are as follows:where and are nonsingular matrices, is a nilpotent matrix, i.e., for some μ we have , and , , . Let
be the set of admissible inputs
and
be the set of consistent initial conditions
for which Equation (
1) has a solution
for
.
Theorem 1 ([
3]).
The solution to Equation (6) (or equivalently (1)) for and is given bywhere the vector is arbitrary, q is the index of determined by (11) and For any admissible
the consistent initial conditions should satisfy the equality
which is obtained from (
16) and (
17) for
, the vector
is arbitrary and
is given by (
18). The solution (
16) of (
1) for
can be computed, substituting
.
Observe that the matrices (
5) and their Drazin inverses appear in the solution (
16) as products
,
,
,
,
. This is an important property since these products do not depend on the choice of the parameter
c, unlike the matrices
,
,
themselves [
7].
4. Equivalent State-Space Model
We shall show that Equation (
4) is equivalent to two equations (subsystems). Based on [
3,
31] we obtain the following. To simplify the notation we introduce
Lemma 2 Equation (4) can be decomposed into the following equations: Substituting (
2) into (
23)–(
24) and introducing the length
L of practical implementation (the constraint on the upper limit of the summation), as in the case of (
9), gives
where
is a nilpotent matrix with the nilpotency index
q and
It is not difficult to verify that the solution (
16) is the sum of solutions to Equations (
25) and (
26) for
.
5. Stability and Superstability Analysis
Methods for investigating the stability and superstability of DDFL systems will be presented in this section.
5.1. Stability Analysis
Definition 3. The DDFL system (1) with , is called asymptotically stable iffor all consistent initial conditions . From the solution to Equation (
26), which is a third component of (
16), it follows that for
the vector
is equal to zero for any
. Taking into account (
22), the stability of the DDFL system (
1) depends only on the vector
, which is a solution to Equation (
25).
The stability of the DDFL system (
1) can be tested using well-known methods in the literature; see, e.g., [
27]. For the analysis, either Equation (
6) or (
25) can be used.
Definition 4. The DDFL system (1) is called practically stable for given length L of practical implementation if the DDFL system (9) (or equivalently (25)) is asymptotically stable. If the DDFL system (9) (or equivalently (25)) is asymptotically stable for , then the DDFL system (1) is called asymptotically stable (independent of L). Theorem 2 ([
3]).
The DDFL system (1) with given length L of practical implementation is practically stable if and only if all roots of the characteristic equationare located inside the unit circle. Taking into account that [
32]
from (
29) we obtain the following.
Theorem 3 ([
3]).
The DDFL system (1) is asymptotically stable (independent of L) if and only if all roots of the characteristic equationare located inside the unit circle. The stability of the DDFL system (
1) can also be tested using the approach based on the Equation (
25).
Lemma 3. The characteristic equation of (25) has the formand it has roots of the characteristic Equation (29) along with additional zero-valued eigenvalues. Proof. Using (
15) we have
since
and
Again using (
15), we can write
since
and
is given by (
34). By (
12) we have
and from (
15) it follows that
if and only if
, where
, i.e.,
is a scalar matrix. Therefore, Equation (
33) can be written as
since
. Equating (
33) and (
36) to zero and denoting
and
we obtain (
32). □
Taking into account the above considerations, the following theorems can be formulated.
Theorem 4. The DDFL system (1) is practically stable for a given length L of practical implementation if and only if roots of the characteristic equationlie inside the unit circle and its remaining roots are zero-valued. Theorem 5. The DDFL system (1) is asymptotically stable (independent of L) if and only if roots of the characteristic equationlie inside the unit circle and its remaining roots are zero-valued. 5.2. Superstability Analysis
The value of the free response of an asymptotically stable system decreases to zero over time, but it may considerably increase in the initial part of the trajectory. In superstable systems, which are a subclass of asymptotically stable systems, state variables are limited by the value of the norm of the state vector, which decreases monotonically to zero over time [
28,
29,
30].
Furthermore, the problems of static output stabilization, the simultaneous stabilization of more than one system, robust stabilization under matrix uncertainty, etc., are solved easily for superstable systems [
29].
In this paper the following vector and matrix norms will be used:
the infinity-norm of a vector
the infinity-norm of a matrix
Definition 5 ([
29]).
A matrix of the discrete-time linear systemis called superstable ifor equivalentlywhere the quantity σ is called the superstability degree of the matrix A. A superstable matrix is also a stable one, but the reverse implication is not true (a stable matrix may not be a superstable one).
Theorem 6 ([
29]).
For the superstable discrete-time linear system (41) the following holds: Now let us consider the DDFL system (
1). From (
25) and (
26) for
,
we have
since
. Taking into account (
45) and
, Equation (
25) for
,
can also be written as
where
and the matrix
is arbitrary.
In descriptor systems the matrix
acts as a pseudo-state matrix. From the solution of Equation (
23) it follows that
may contain insignificant entries that are further reduced through multiplication by
. To eliminate such entries from the matrix
we can use the term
, which does not change the solution to the state equation [
3,
31].
Taking into consideration (
16) and (
45) the solution to Equation (
46) for
can be expressed by
where
Let us introduce the definition of practical superstability for DDFL systems, analogous to the definition of practical stability given in
Section 5.1.
Definition 6. The DDFL system (1) is called practically superstable for a given length L of practical implementation if the DDFL system (46) is superstable. If the DDFL system (46) is superstable for , then the DDFL system (1) is called superstable (independent of L). Theorem 7. The DDFL system (46) is superstable if there exists an arbitrary matrix such thatorwhere the matrix is defined by (47) and Proof. From Theorem 6 it follows that for a superstable system we have
. Let us assume that the DDFL system (
46) is superstable. Hence, we obtain
since
. Taking into account that
the inequality (
53) can be rewritten as [
3]
The conditions (
50)–(
52) are obtained by solving (
56) with respect to
. □
Theorem 8. The DDFL system (46) is superstable for if there exists an arbitrary matrix such thatwhere the matrix is defined by (47). Proof. From the equality [
25]
and (
56) for
we get
The condition (
57) is obtained by solving (
59) with respect to
. □
Combining Theorems 7 and 8 gives the following.
Theorem 9. - 1.
practically superstable for a given length L of practical implementation if there exists an arbitrary matrix such that (50)–(52) holds; - 2.
superstable (independent of L) if there exists an arbitrary matrix such that (57) holds.
The matrix shall be chosen so that the norm takes its minimal value.
8. Numerical Example
Let us consider the DDFL system (
1) with
and [
3]
The matrix pencil of the pair
of (
93) is regular since
From (
5) for
we have
Observe that
and
. The Drazin inverse of the matrix
can be computed using one of the methods from the literature; see, e.g., [
3]. Thus, we obtain
and
Assuming
the norm of the matrix
takes its minimal value. The desired values of the norm (
98) for superstable systems can be determined using (
50)–(
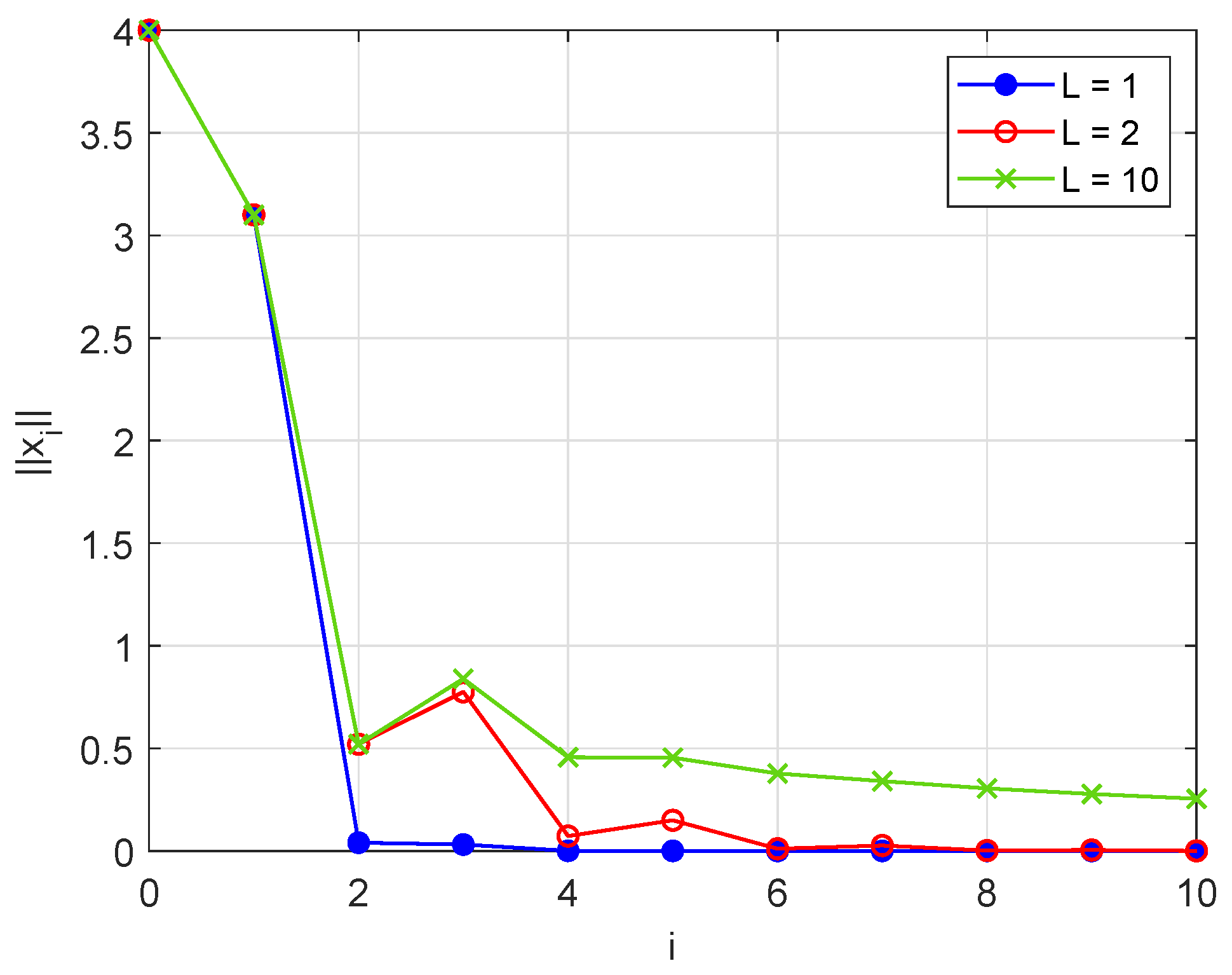
52). Therefore, we have
From (
99) it follows that the considered system is practically superstable for
. The state vector norms for
and different values of
L are plotted in
Figure 1. We can see the monotonic decrease only for
.
Now let us consider the SSF (
60) with
and
Choosing
,
yields
. From (
97) and
we have
and from (
72)
for
. The desired values of the norm
are also given by (
99) since the superstability conditions of Theorems 7 and 8 depend only on the fractional order
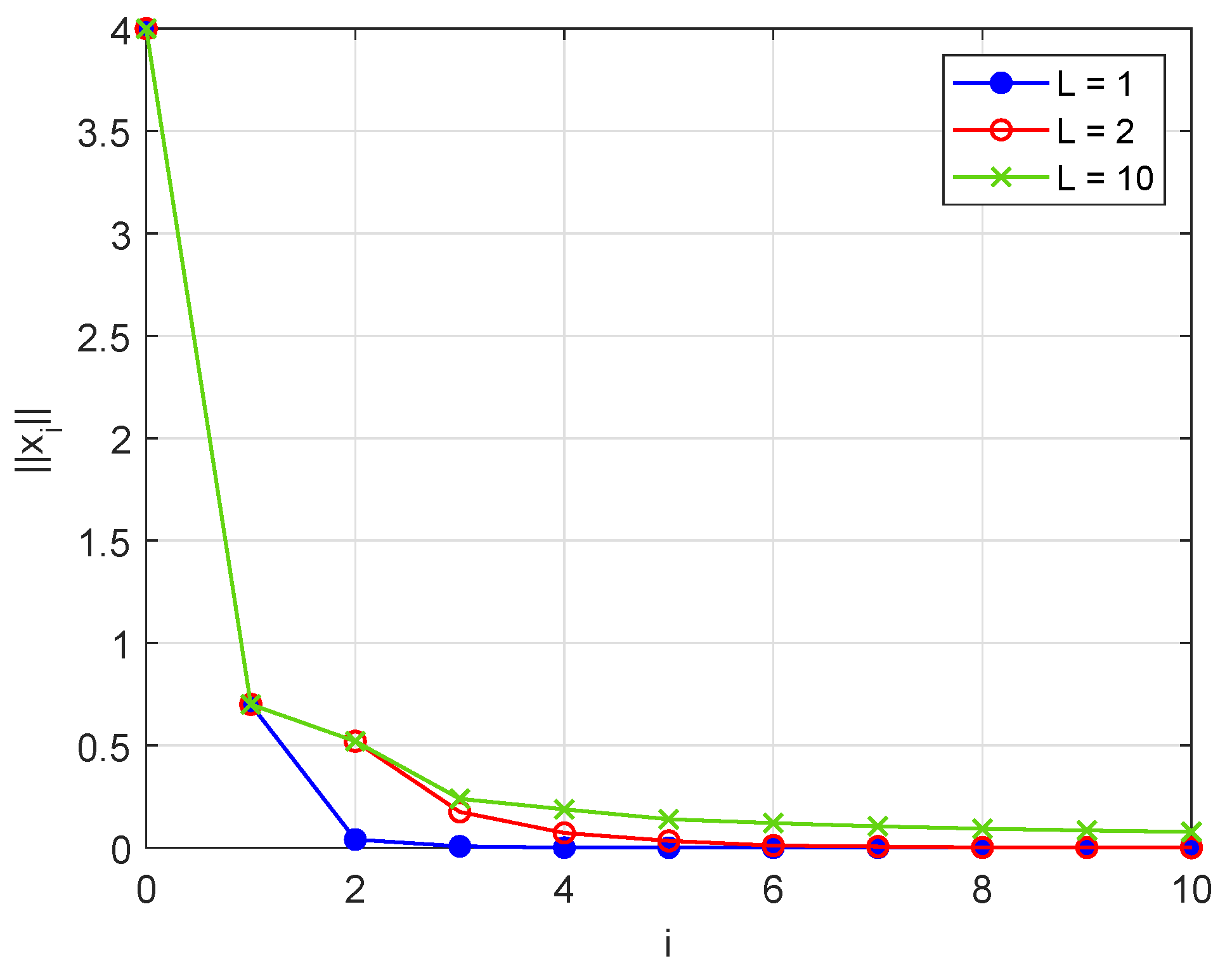
of the system. Thus, we have
Therefore, by Theorem 11 the DDFL system (
1), (
93) with
and the SSF (
60), (
102) is superstable (for
) since
and
. The state vector norms for
and different values of
L are plotted in
Figure 2. We can see the monotonic decrease in every considered case. Similar results can also be obtained for any
. The set of consistent initial conditions of the CL-DDFL system with SSF is different since from (
75) for
we have
.
Finally, let us consider the DSF (
79). In this case we cannot find the matrix
H such that (
88) holds since
,
and the condition (
89) is not satisfied. Using (
83), (
85), (
93) and
we obtain
and
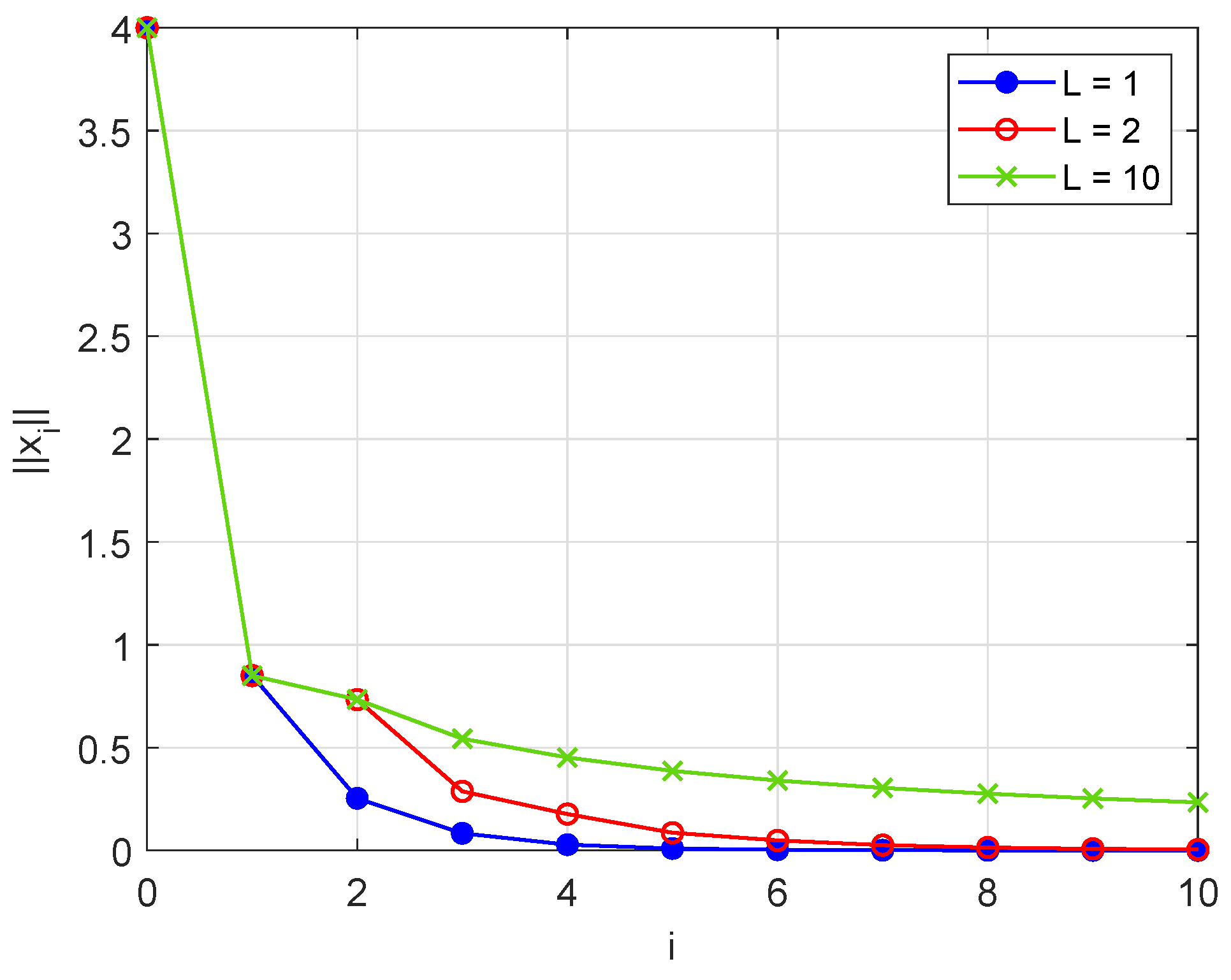
The norm of (
107) is given by
Therefore, by Theorem 14, from (
99) it follows that the DDFL system (
1), (
93) with
and the DSF (
79), (
105) is superstable (for
) since
. The state vector norms for
and different values of
L are plotted in
Figure 3. We can see the monotonic decrease in every considered case. Similar results can also be obtained for any
.
9. Concluding Remarks
In this article, the superstabilizing state-feedback control problem in DDFL systems with a regular matrix pencil has been studied. Methods for investigating the stability and superstability of such systems have been provided. Procedures for the computation of the SSF and DSF gain matrices such that the CL-DDFL system is superstable have been proposed. The main advantage of the presented approach is that it allows us to design the feedback control that affects pole-independent system properties such as superstability, for which the standard approach discussed in the literature is not applicable.
The main contributions of the article are as follows. A method for investigating the stability of DDFL systems based on the equivalent state-space model has been suggested (Theorems 4 and 5). Sufficient conditions for the superstability of DDFL systems have been provided (Theorem 9). Procedures for designing the SSF and DSF such that the CL-DDFL system is superstable have been proposed (Theorems 10, 11 and 14). The effectiveness of the presented approach has been demonstrated on a numerical example.
The sufficient conditions presented in the article were obtained through the use of many inequalities of matrix norms, which are easy to apply, but which do not give the exact result, e.g., from the inequalities (
55) a noticeable overestimation may arise. An open problem is that of establishing the necessary superstability conditions of the considered class of dynamical systems.
This analysis can be further extended to fractional descriptor systems with different fractional orders.






{kind=link}
{kind=link}
{kind=link}