1. Introduction
Autonomous driving technology has significantly contributed to the automotive industry, where it promises the potential of improving safety and efficiency in the transportation system by reducing dangerous human driving behavior. This is based on the claim that 94% of crashes are caused by human errors [
1]. While the number of vehicle traffic crashes is likely to rise consecutively, an autonomous vehicle becomes likewise one of the most intensively researched technologies to prevent such tragic accidents over the past decades. Furthermore, it also benefits many industries, including transportation and logistics, expecting to get positive impacts on cost reduction as it can decrease the cost of congestion and improve energy economy.
Truck platooning, one of the current widely known autonomous vehicle technologies, has continuously emerged in recent decades to address safety and sustainability issues in the transportation and logistic systems. This technology can be defined as a group of virtually synchronized trucks driving closely together in a single convoy. By using electronic coupling and wireless communications, it allows trucks to accelerate and decelerate simultaneously, thereby achieving driving with a small safety inter-vehicle space in which human drivers may not perform better. As a consequence of the small inter-vehicle distance, this significantly helps to improve fuel efficiency by reducing aerodynamic drag [
2], which brings down fuel consumption and cuts optional costs. Several simulations-based studies [
3,
4,
5,
6,
7] have proved that truck platooning results in fuel-saving approximately 10% on average, since air friction becomes a problem only for the leading truck such that it benefits trailing trucks with a much smaller resistance. Although previous experiments present diverse results due to different conditions [
8], all results still validate that fuel efficiency can be improved the best in trailing trucks, providing much higher fuel saving compared to the lead one.
Even though truck platooning has already offered various benefits due to the lower fuel usage, we foresee that this technology can be improved to achieve a higher driving distance by changing the positions of the trucks within the platoon. The novel idea is based on the simple fact that trucks at the front consume more fuel energy than the rear trucks in the platoon. Thus, instead of having static positions during the entire driving, changing positions from time to time can redistribute the unequal fuel consumption rates evenly among the trucks. By exploiting such intuition, we have proposed preliminary position change algorithms in truck platooning [
9]. The algorithms make trucks consume an almost similar amount of fuel by periodically changing the positions of trucks in the platoon until one runs out of energy. Theoretically, this algorithm allows truck platooning to drive longer because trucks with more fuel go to the front, where trucks with less energy can experience less air resistance at the rear positions. However, the results from our previous work [
9] shows that the number of position changes is considered relatively high and may increase significant fuel consumption during the position change operations.
When considering the realistic scenario, one of the reasons for extra fuel consumption is an unsteady velocity caused by frequent acceleration and breaking. Even though the total driving range can be higher, one position change means trucks have to change their positions, thus wasting fuel energy in adjusting the velocity eventually. Our primary motivation is to maintain the maximum increased driving distance achieved with the position change methodology, yet with much less position change count.
In this paper, we mathematically formulate the position change problem as an optimization problem. Furthermore, the heuristic algorithms proposed in [
9] are revised in a more rigorous manner so that they can be applied to more general cases. This paper also proposes an improved position change algorithm that promises a smaller number of position changes, achieving more efficient fuel-saving while still achieving the highest driving range. Basically, trucks with the higher remaining fuel capacity move to the front of the platoon such that all trucks arrange in descending order of fuel left. We notice that the position arrangement may have similar patterns over and over, since the platoon already shares fair fuel consumption. This urges us to reorganize the arrangement pattern where truck platooning only switches to each pattern once with no duplicates to reduce the number of position changes. The simulation-based evaluation shows that the number of position changes is significantly reduced compared to the original algorithm. Thus, it can significantly decrease fuel costs per freight transportation, thus enhancing fuel economy and providing much more traffic efficiency. To the best of our knowledge, our work is the first to bring position change methodology into truck platooning technology.
The contributions of the paper can be summarized as follows.
We formulate the position change problem as an optimization problem in a more rigorous manner. We define the assumptions and the objects more clearly.
We revise two previously proposed position change algorithms based on the formulated optimization problem.
We propose a new objective, which is the number of position changes, and a new heuristic algorithm for the new objective.
The rest of the paper is organized as follows. In
Section 2, we describe the background and review the related works.
Section 3 proposes several heuristic position change algorithms, which focus on prolonging the driving range and reducing the number of position changes. We present the evaluation results of the proposed algorithms in
Section 4, and discuss the computational complexity in
Section 5. Lastly, the paper is concluded in
Section 6.
2. Literature Review
Several research institutions and transportation manufacturers have eagerly studied and developed truck platooning technologies for decades, expecting a fully automated vehicle in the current timeline and bringing human beings a brighter future in the freight industry and transportation system. According to the levels of driving automation by SAE International [
10], Level 5 or full automated refers to full driving automation, where vehicles automatically pilot themselves in all driving environments with no human driver required. Still, truck platooning realizes only SAE level 2 automated driving, where trucks are allowed to control both steering and acceleration/deceleration capabilities, yet the driver is needed and makes it fall short of self-driving automation. An effort aims to address challenges to accomplish platooning systems for higher automation levels, as well as ascertaining solutions to enhance fuel efficiency. Several studies have proved the benefits of reduced aerodynamic phenomena. However, vehicle configurations and other subject influencing factors are needed to be studied to achieve optimal fuel savings in the platoon. For example, the following questions should be addressed.
What are the influencing factors on fuel consumption reduction in the truck platooning system?
What are optimal configurations of trucks to get the highest fuel savings?
Does vehicle position in the platoon affect fuel consumption for each truck? If yes, how does it remarkably influence the fuel consumption reduction in each position?
Many papers have been studied to answer the above questions. In early 2000, Bonnet et al. [
4] conducted two-truck platooning experiments with heavy-duty ACTROS semi-trailer trucks. The lead truck is driven manually, and the trailing truck is operated automatically with a driver assistance system. Two measurement tests were carried out with two constant velocities of 80 km/h and 60 km/h and inter-vehicle distances from 5 m up to 16 m. The trailing truck experienced a remarkable fuel consumption reduction of 21% at 80 km/h velocity with 10 m longitudinal spacing, and the leading truck experienced a 7% reduction in the corresponding configurations. The demonstration results further show that both velocity and inter-vehicle distance significantly impact the fuel consumption reduction where the decreasing gap space makes reduction benefits increase, whereas decreasing speed makes the opposite outcomes. It should also be noted that the leading truck can also have fuel reduction in platooning compared to that case of driving alone.
A platoon of three tractor–trailer truck experiment was conducted under automated longitudinal platoon control by Lu et al. [
5] in 2011. Besides the environmental conditions, they considerably investigate the effects of the position within the platoon and the inter-vehicle spacing. With three heavy trucks at 85 km/h speed and a gap spacing of 6 m, the third truck saves the most fuel among the three, and the second still achieves more fuel-saving than the first truck. To be specific, the leading truck achieves 4.3% of reduction in fuel consumption, and about 10% and 14% fuel savings are achieved for the second and the third truck, respectively.
The aerodynamic simulation in a two-truck platooning by Dávila et al. [
6] has been carried out to select the most appropriate gaps between the platoon in 2013. This work consists of a series of CFD (Computational Fluid Dynamics) simulations from 3 m to 15 m gap spacing configurations, considering steady environmental conditions at 90 km/h velocity. The results show that trucks in the platoon remarkably achieve fuel-saving approximately from 7% to 15% at 8 m inter-vehicle distance, and about only 2% to 11% fuel saving at 15 m. This work also confirms that the fuel consumption can be reduced with the shortened gap spacing.
Lammert et al. [
7] evaluated a two Class 8 tractor–trailer platoon on fuel consumption in 2014. The experiments were carried out with a steady-state speed from 55 mph to 70 mph or approximately 88 km/h to 113 km/h, with inter-vehicle gaps ranging from 20 ft to 75 ft or about 6 m to 23 m, and the total gross vehicle weights (GVW) of 65,000 lbs and 80,000 lbs. According to the experimental results, significant fuel savings can be achieved for both leading and trailing trucks where the first truck experienced up to 5.3% of fuel-saving, and the second truck experienced up to 9.7% fuel-saving. The best configuration is 88 km/h constant velocity, roughly 9 m inter-vehicle distances, and 65,000 GVW, which results in 6.4% fuel consumption reduction in the whole convoy. They further conclude that atmospheric conditions and heavy loads of trucks may significantly influence in savings attainable, considering heavily loaded vehicles consume fuel at a higher rate because of the increased airflow.
Truck platooning system experiments and studies have been summarized through Zhang et al.’s work [
8] in 2020. The longitudinal space is considered the highest influencing factor in truck platooning fuel economy. The position and vehicle configurations are also made to the top-tree highest respectively. In summary, the overall performance of fuel consumption reduction in a platoon can be increased with closer longitudinal space. The vehicle’s position in the platoon influences fuel consumption in the way that trailing vehicles always experience more fuel savings and even more in next-order trucks due to the less aerodynamic drag. Masses and loads also significantly affect the percentage of fuel savings in the platoon, as the heavy loads consume fuel much more than the ordinarily loaded or empty trailer trucks.
All of the previous studies that we have discussed so far come to the conclusion that influencing factors such as longitudinal spacing, a vehicle position in a platoon, and vehicle configurations, affect the effectiveness of energy-saving in the truck platooning system. These factors influence the reduction of aerodynamic drags, thereby achieving reduced fuel consumption consistently. Nevertheless, experimental tests conducted under different conditions can cause different results, where the optimal solution for truck configurations cannot be determined. This is because it depends on various uncontrollable conditions, including road grades, presences of traffic, and weather conditions, which are restricted in reality. Still, these studies help us understand the influence of positions in a platoon on the unequal distributions of fuel consumption reduction, thus urging us to address the remaining challenge to improve fuel efficiency optimally.
In our previous work [
9], we have introduced the position change problem, of which the objective is to prolong the driving range with the given amount of initial fuel. We have also proposed two heuristics (“Fuel Amount Heuristic (FAH)” and “Traveling Time Heuristic (TTH)”) for the position change problem to enable the platoon to drive as far as possible and reach the maximum driving range or distance, thus enhancing fuel-saving the most. The difference between the two heuristics is the conditions when the vehicles should change their positions. In “Fuel Amount Heuristic”, the platoon starts in the order of the initial fuel amount of the trucks. For any two adjacent vehicles, if the remaining fuel of the leading truck is less than the remaining fuel of the trailing truck by more than a threshold
c, then the two vehicles should change their position. The intuition is that we want to put a vehicle with more energy into the front positions, but not so frequently. In the “Traveling Time Heuristic” algorithm, we first divide the time into multiple time slots. At the beginning of each time slot, the truck with the highest fuel moves to the front of the platoon and the second-highest moves to the second position, and so forth. Eventually, the platoon forms a descending order arrangement in each time slot and is ready for the next position changes until one of the trucks runs out of fuel. However, Ref. [
9] only provide preliminary results of the proposed heuristic algorithms, and the description of the problem is not rigorous. Furthermore, they do not explicitly focus on the problem of frequent position changes.
4. Performance Analysis and Simulation Results
In this section, we evaluate the performance of the heuristic algorithms that we have proposed: “Fuel Amount Heuristic (FAH)”, “Traveling Time Heuristic (TTH)”, and “Sorted Time Slot (STS)”. The performance metrics that we focus in this section are the total driving range and the number of position changes. Position change operation helps save the fuels of the trucks participating in the platoon by exploiting FAH and TTH. Furthermore, “STS” aims to reduce the number of position changes.
To simulate the algorithms in a more realistic environment, we first define some parameters used in the algorithms. The trucks are driving at the constant speed of
s = 85 km/h and inter-distance spacing at 6 m, as it presents the most reliable longitudinal spacing that may provide the highest fuel-saving. Each truck exhibits the same fuel consumption rate at
r = 32.6 L/100 km, which is known as the average EU tractor–trailers [
12], and starts with the same amount of initial fuel of 300 gallons or 1135.62 L, i.e.,
= 1135.62 L for all
. We assume that there is no fuel consumption in the process of the position change. Furthermore, we also assume that there is no road or load-related fuel consumption. For the fuel consumption reduction parameter
, we use the results studied by Lu et al. [
5]. Thus, we set
,
, and
. We further assume that from the fourth position and after, the consumption reduction rates are the same as 14%, i.e.,
for
, since there is no available information about the reduction rates after the third position in the existing literature.
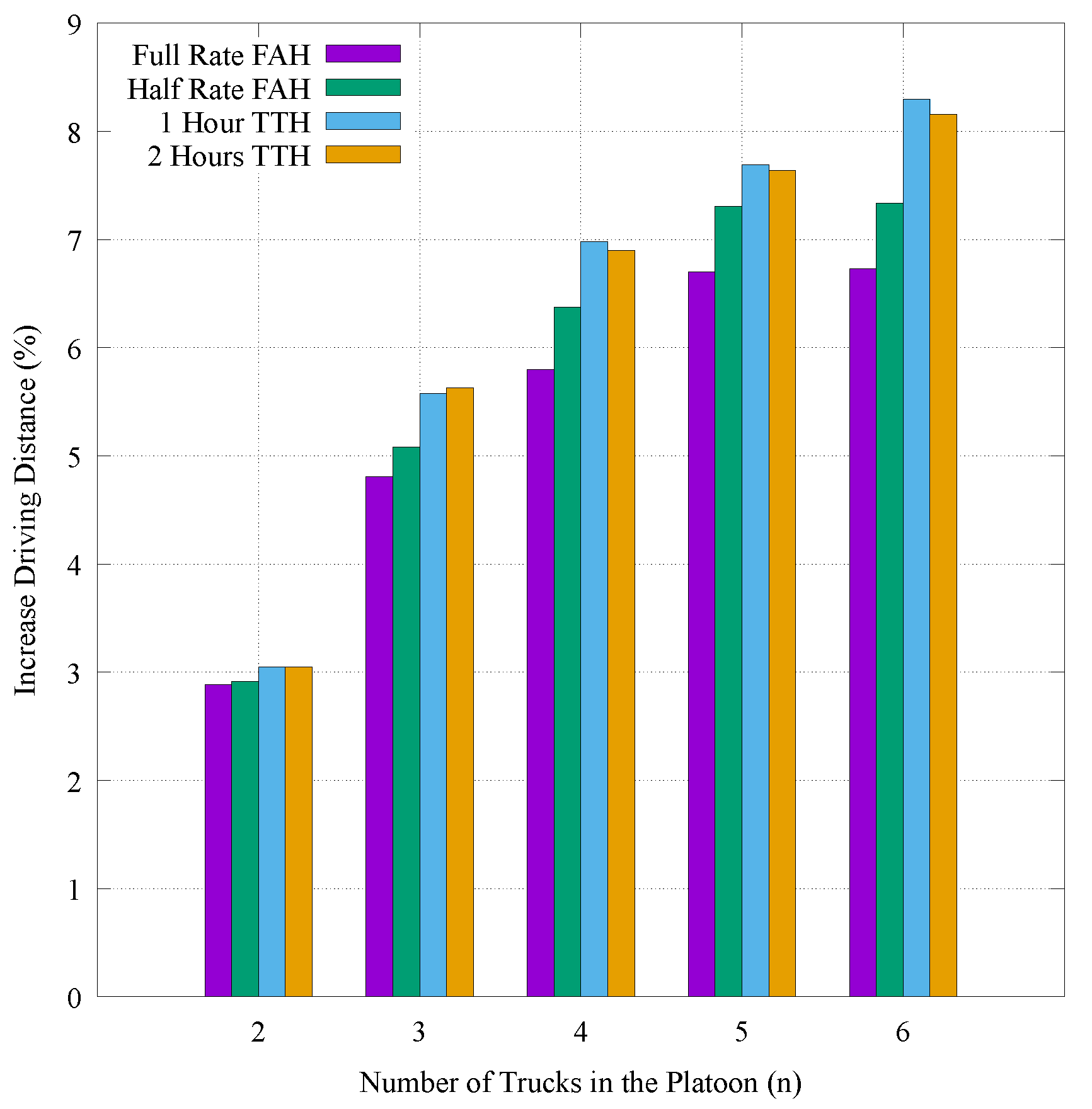
Figure 1 shows the increased driving distance compared to the fixed order truck platooning in percentage over a various number of trucks. For “Fuel Amount Heuristic (FAH)”, we set
c with two different values. The first is to set
c as an amount of fuel needed for 100 km traveling, based on fuel consumption rates, called “Full Rate”. The second one is to set
c as the amount of fuel needed for 50 km traveling, called “Half Rate”. For “Traveling Time Heuristic (TTH)”, we set
to 1 h and 2 h. We vary the number of trucks
n from 2 to 6. The values of parameters used in this simulation are summarized in
Table 4.
Since the initial fuel amounts are the same, the fixed order positioning represents the lower bound of the driving range. The comparative simulation result shows that changing vehicle positions by the proposed algorithms increases the cumulative fuel consumption reduction within the platoon, making the total driving range much longer with the same initial fuel capacity. Furthermore, it indicates that the higher the number of trucks in the platoon, the longer the driving distance. To be specific, the percentage of the increased range rises from approximately 2.8–3.0% in two-truck platooning to 6.7–8.1% in six-truck platooning. The result is justified by the concept of average reduction rates of n trucks. The operation of changing positions is to make the reduction rates of the trucks similar. In other words, the average reduction rate of the n trucks becomes . Since is larger for a larger j, the average reduction rate increases as n increases. Therefore, we have longer driving ranges.
Compared to Lu et al.’s work, since there are no position changes, the maximum fuel consumption reduction rate remains steady with the first truck position at 4.3% no regards the number of trucks in the platoon. Meanwhile, our proposed algorithm can obtain a higher fuel consumption reduction rate. For example, for two-truck platooning.
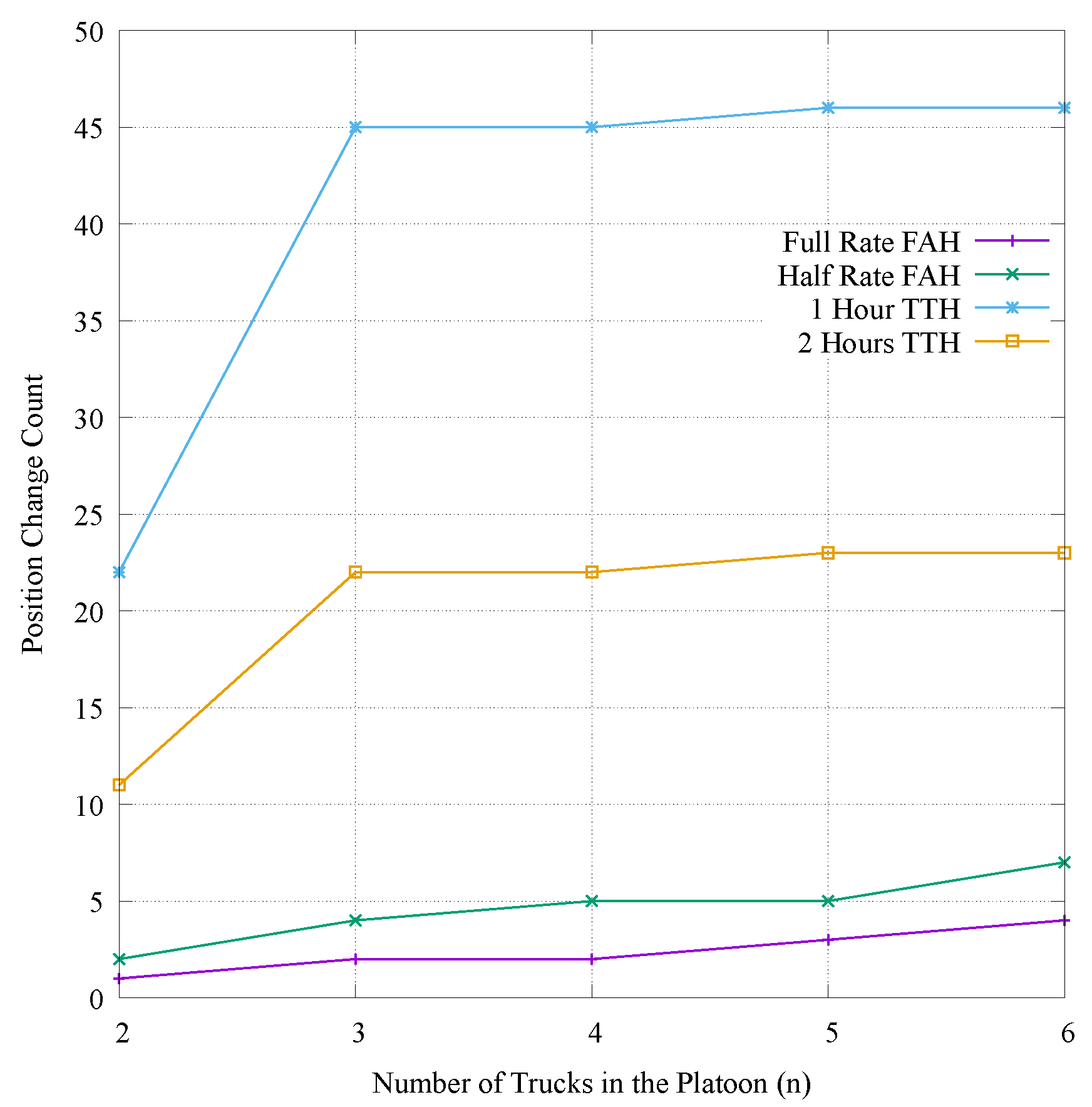
For the same simulation,
Figure 2 shows the number of position changes in the platoon. Before analyzing the result, we first compute the driving range and driving hour without platooning. The driving range without platooning is
= 1135.62 L/(32.6 L/100 km) = 3483 km. Since the speed of the trucks is
s = 85 km/h, the driving time is about 41 h. Due to the effect of position changes, the driving range and time become longer than those values. In
Figure 2, FAH shows very few numbers of position changes, and TTH shows a high position change count. The reason is quite clear. In FAH, the position change occurs when the difference of the fuels of two consecutive trucks becomes larger than the fuel amount of 100 km driving, i.e., 32.6 L. For a simple calculation, we consider
and
. The reduction rate difference is
. Thus, it takes 100 km/0.057 = 1754 km of driving to create this much fuel difference. Considering the speed of the trucks
s = 85 km/h, it takes about 20 h. Thus, the position change happens 2 or 3 times the total driving. This count is for the first and second trucks. There are position changes at other positions, too. So it is quite reasonable to have 5 position changes when
for Full Rate FAH.
Regarding the results of TTH, we have 22 time slots for “1 Hour” at . The count rises to approximately 46 rounds when . This number is quite reasonable considering the analysis of the driving time. Since the total driving time becomes more than 41 h due to the position changes, when = 1 h, we should have more than 41 position changes during the platooning. Similarly, position changing every “2 Hours” shows half of the “1 Hour” total number of position changes for each n.
One question is why we have only half of the position changes at compared to that of . The reason is quite straightforward. When , at every 2 h, the fuels of the two trucks become the same so that there is no need to change the positions, which results in half of the expected position changes. However, for , this is not the case. For example, when , suppose that in the first time slot, we have sequences . Then, in the second time slot, we should have the sequence of . At the end of the second time slot, truck 1 and 3 have the same amount of fuel, but not truck 2. After the third time slot, there is no way to make the fuels of the three trucks the same. Therefore, for , we have a similar number of sequence changes to the driving hours.
Based on the simulation results so far, it is clear that if we increase in TTH, we have a lower driving range and lower switching counts. Similarly, if we decrease , we have a higher driving range and a higher number of position changes. “Sorted Time Slot (STS)” helps reduce the position change counts while having the same driving range as TTH.
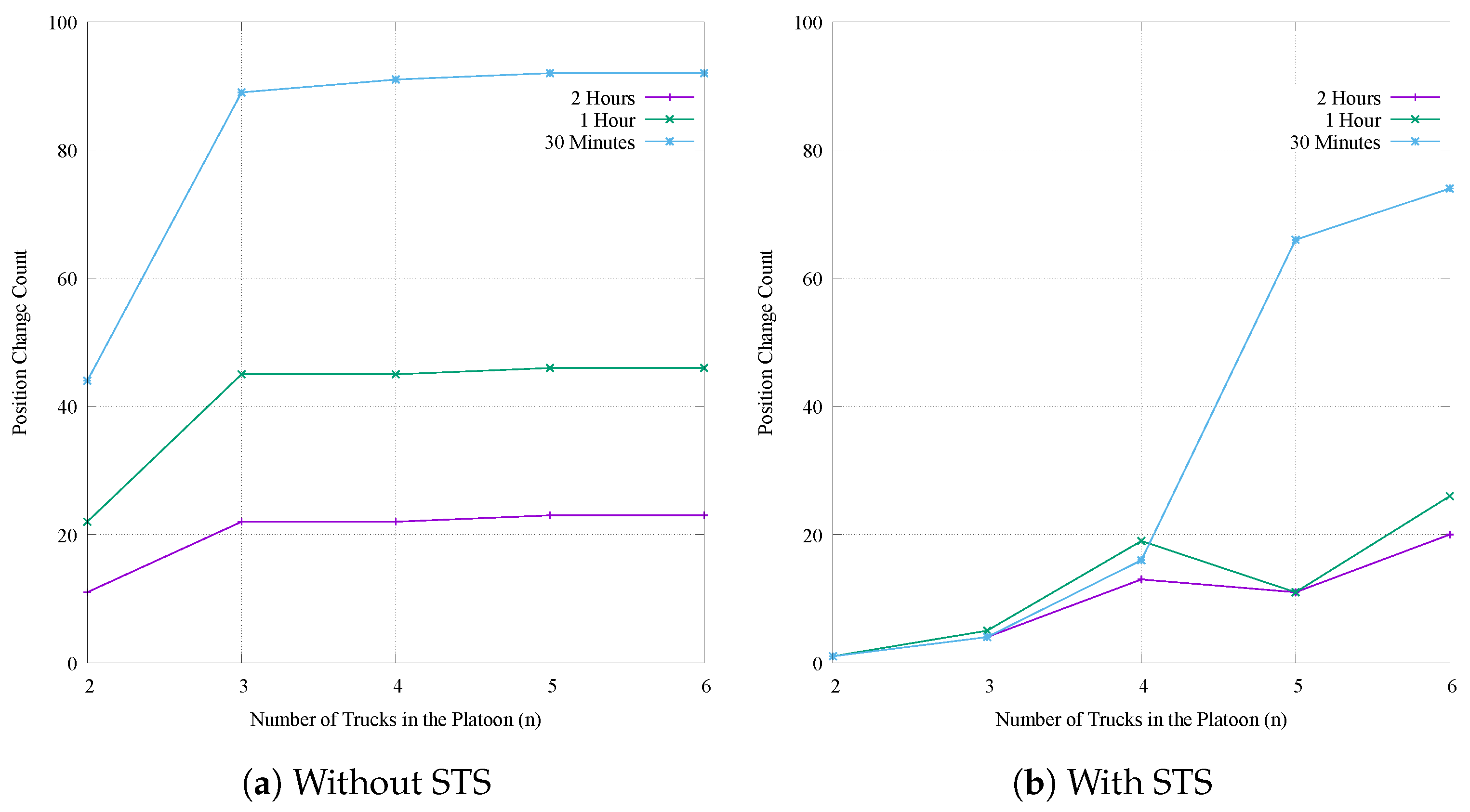
Figure 3 shows the comparison of sequence changing count with and without STS over the number of trucks. For the case without STS shown in
Figure 3a, the results are the same as that of
Figure 2. Theoretically, there can be
different position combinations. Then, the maximum number of position changes is
. However, not all the cases appear in the positions because the number of time slots is much less than
. Furthermore, there can be many duplicates in multiple time slots. Thus, sorting the time slots may reduce the number of position changes because we can rearrange the time slots so that duplicates join together.
Figure 3b shows the switching counts with STS. It can be clearly seen that the number of position changes is much less for various time slot sizes
. Furthermore, we achieve the optimal position change count for
, which is just one, while still holding the longest driving distance. When
, the position change matrix
P has columns of
or
. In STS, we sort the position change matrix by their columns, so we have only one position change from
to
.
The maximum number of unique position sequences for
n trucks is
. For example,
. However, in
Figure 3b, we have less than 80 counts for
. That is because we have only around 100 time slots when
min. If there are more time slots, then we have more combinations of position sequences, thus many position changes. To see the effect of varying
, we also conduct the simulation under shorter
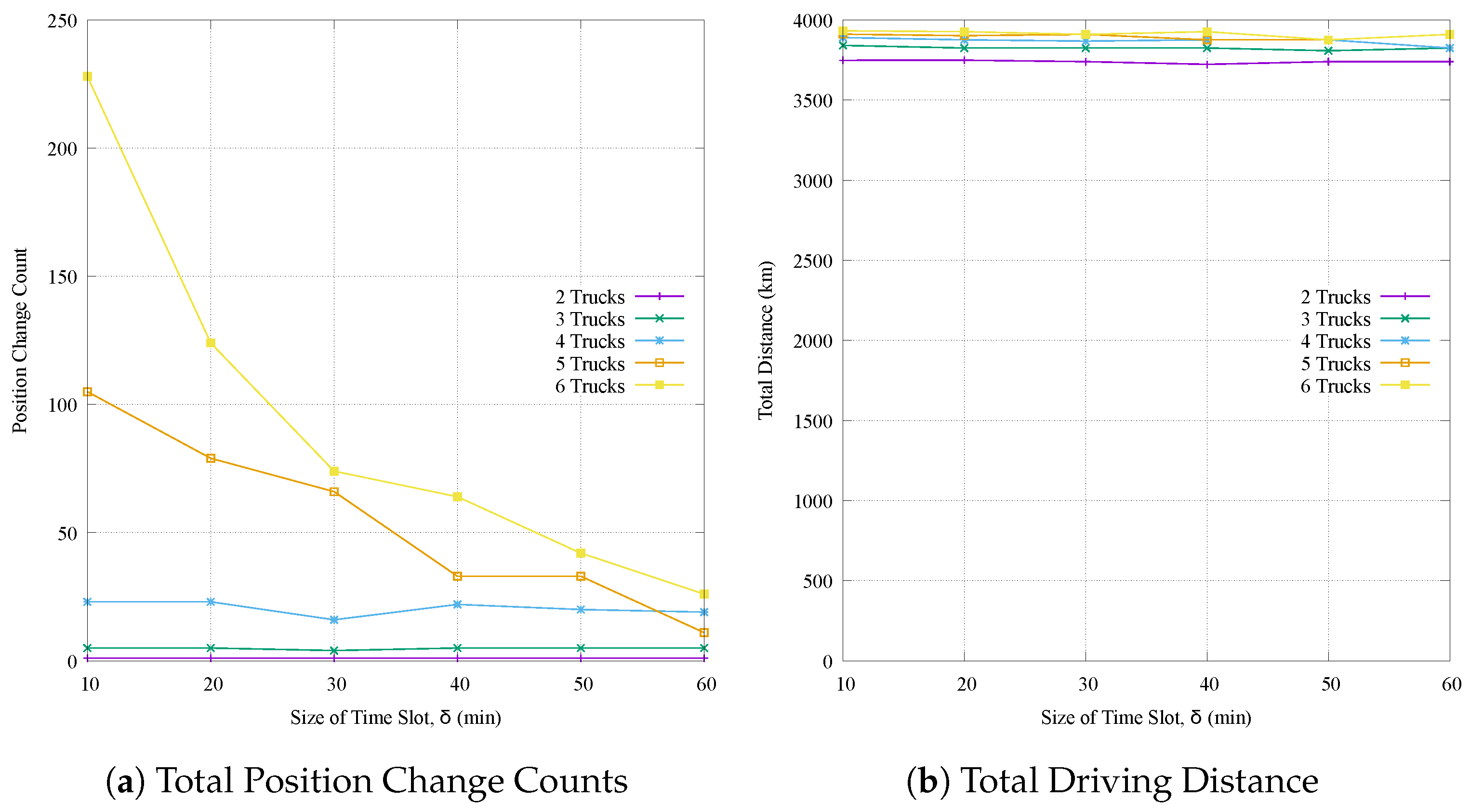
from 10 to 60 min each is 10 min apart.
Figure 4a shows the number of position changes over various
. A shorter time slot increases the number of time slots for the same amount of initial fuel. As we can expect, a smaller
shows a higher position change count. This shows a trade-off between the number of position changes and the total driving range (distance).
To analyze the trade-off, we compute the total driving distances over
.
Figure 4b shows the results. Interestingly, the total distances do not differ much for different
. The results are quite contrary to our intuition. Therefore, we further analyze the results. The case with
and
has 264 time slots to drive, and the remaining fuels are the same as 3.55566 L, which is not enough for the next 10 min time slot. Actually,
. Thus, 264 time slots for
is 44 times slots for
. It means that for
, the two cases of
and
show the same driving distance and have same residual fuel of 3.55566 L. This is somewhat coincidental due to the specific initial amount of fuel. On average, for a time slot size
, there can be residual amount of fuels enough to drive for
amount of time. Thus, if
s = 85 km/h, then the average driving distance difference between
and
is about 40 km. Nonetheless, since the proposed algorithms try to reduce the differences in the fuels among the trucks, the distance difference may not be large regardless of the time slot size
.
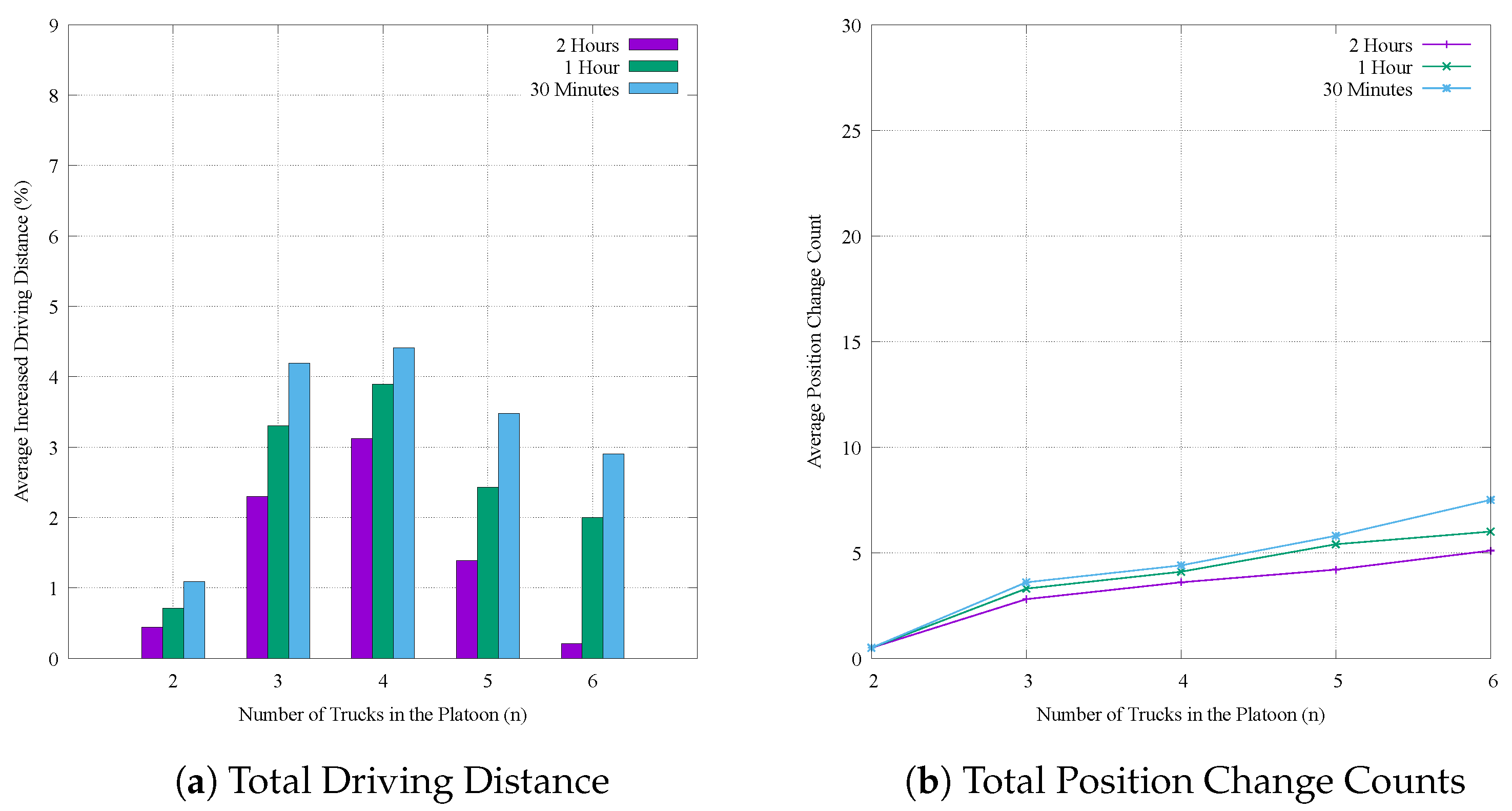
We further investigate the performance of STS when the amounts of initial fuels are unequal. We uniformly randomly select the initial fuel amount of a truck from
gallons, or
L. The value of
are set to be “30 Minutes”, “1 Hour” and “2 Hours” as in previous simulations. We run the STS algorithm ten times and calculate the averages of total distance and position change count over
to 6.
Figure 5a shows the average increased driving distance in percentage compared to the fixed order truck platooning with unequal initial fuel of 10-time runs on simulation per each
. Similar to
Figure 1, the increased driving distance reaches up to 4.5%.
Figure 5b presents the average position change count, where it can be seen that STS also successfully reduces position counts in the unequal initial amount of fuel. It should be noted that the distance enhancements are not as high as the case of equal initial fuel amount. This is because since the initial fuel amounts are unequal, during a number of initial time slots, the positions of the trucks may not change much. Then, the fixed order case may show similar sequences to the case of applying our algorithms. Nonetheless, we can conclude that STS successfully reduces position counts while achieving the higher driving range, regardless of the amount of initial fuel.
5. Discussion
In this section, we discuss our architectural heuristic approaches in both positive and negative details. We first discuss and compare the computation complexity of the three proposed heuristic algorithms.
In “Fuel Amount Heuristic (FAH)”, we first need to select the optimal threshold c that makes the driving distance prolonged to the maximum, yet with a reduced position change count. Since two adjacent vehicles should switch their positions when their fuel amounts are far apart from more than or equal c, the value of c should be small enough to make the position change possible, thus achieving a higher driving distance. However, it should not be too small, as it can make a large number of position change counts and waste energy for unnecessary position change operations. The computation complexity goes to the question, “What is the optimal c and how can we obtain it?”. In order to find the optimal c, we also need to look at other parameters, especially the initial fuel amount of each vehicle. We may have to conduct several rounds of trials and compare the results, which may cost high computation. The complexity goes even higher when considering the realistic scenarios of computing the actual fuel energy along traveling, not just one but all in convoy. Therefore, we recognize taking high computational cost as a negative point for FAH.
Similar to “Traveling Time Heuristic (TTH)”, the maximum increased driving distance with a small number of position change count can be obtained with the small value of . Even though our simulation results show no remarkable difference in total driving distance, still with the small number of time slots, the possibility of position change is lower likewise. Therefore, there is no influential difficulty in choosing the value . However, when considering the higher number of vehicles and a small amount of aspects, this may lead to the complicated position arrangement in a practical environment, since vehicles should align in the decreasing order in each time slot.
“Sorted Time Slot (STS)” promises a significant reduction in position change. However, remarkably, it negatively affects processing times as it has to sort vehicle position arrangement for all time slots such that it can move duplicate columns into consecutive columns after the position change heuristic algorithm is applied. Basically, the time complexity of our algorithms without STS methodology is . With STS, the time complexity becomes . Therefore, our STS may be inefficient on a large number of vehicles in platooning with the small value of .









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}