
Measuring System Design and Experiment for Ground Pressure on Seeding Skateboard of Rice Direct Seeding Machine



Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
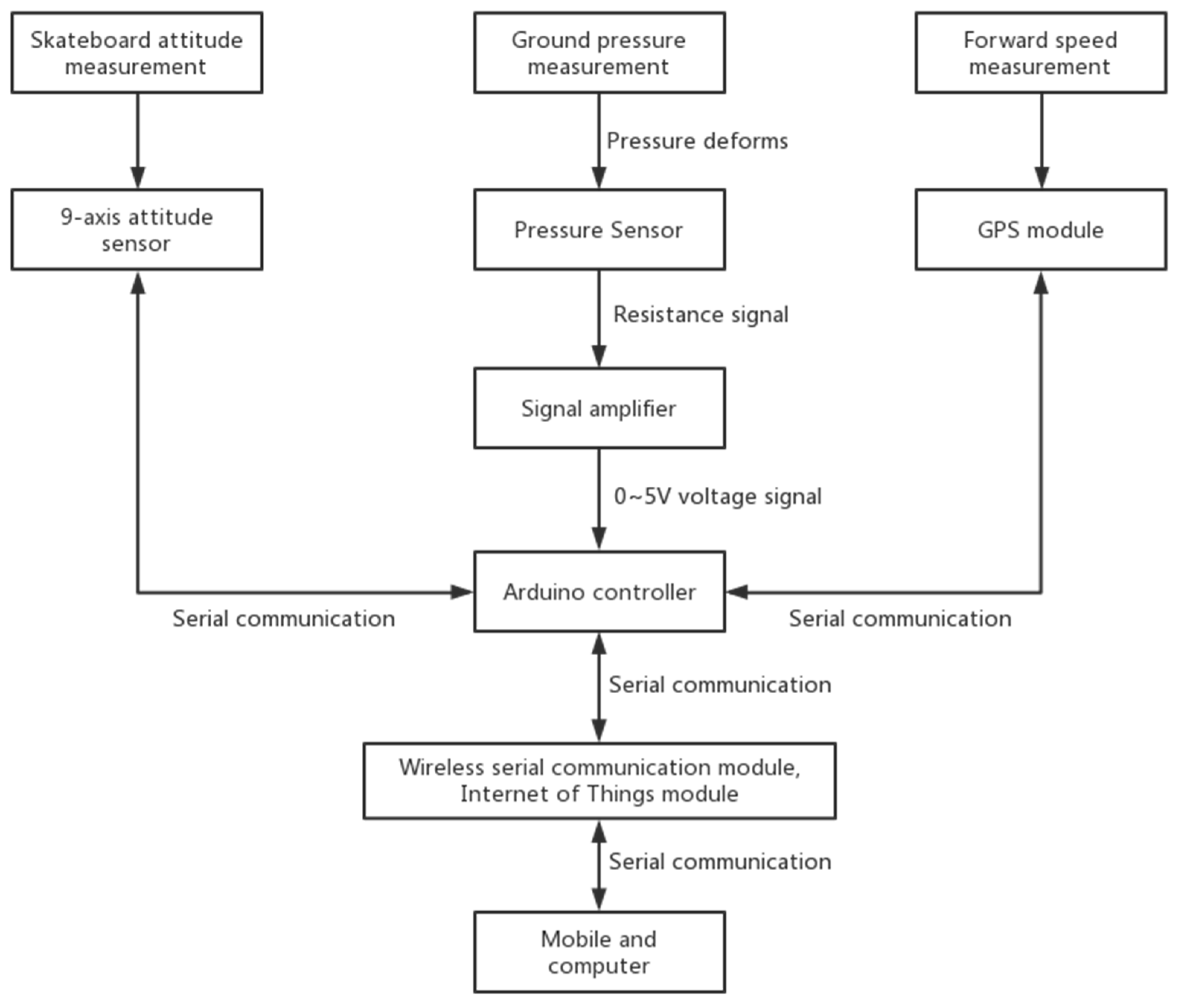
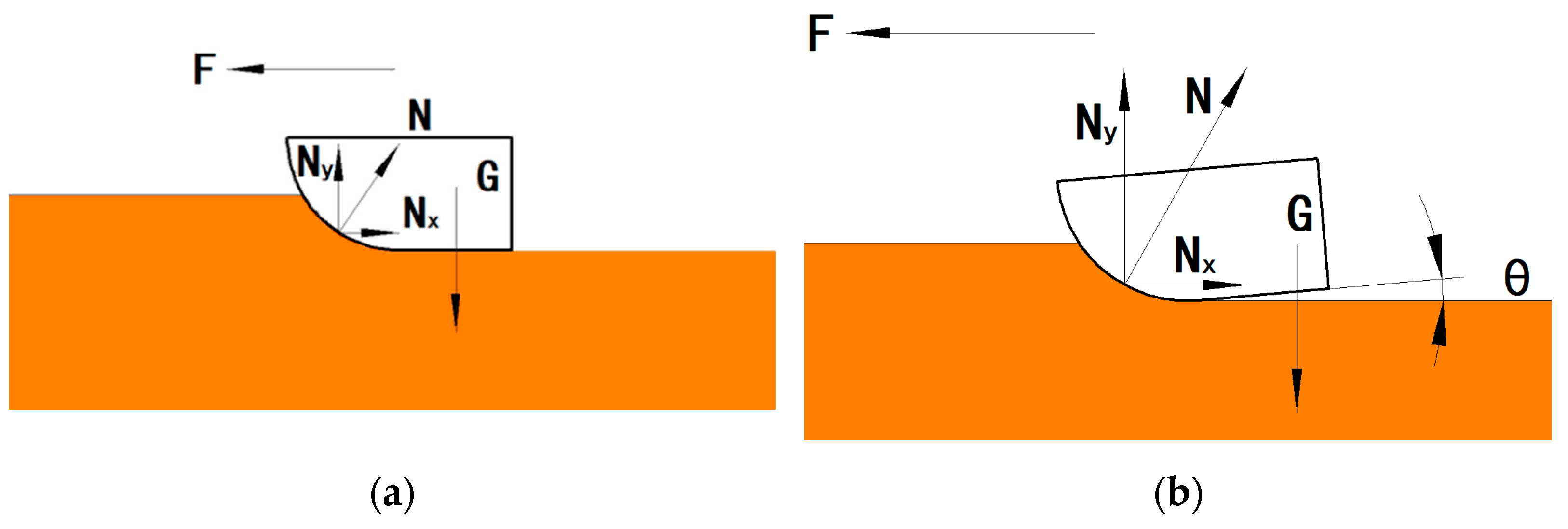
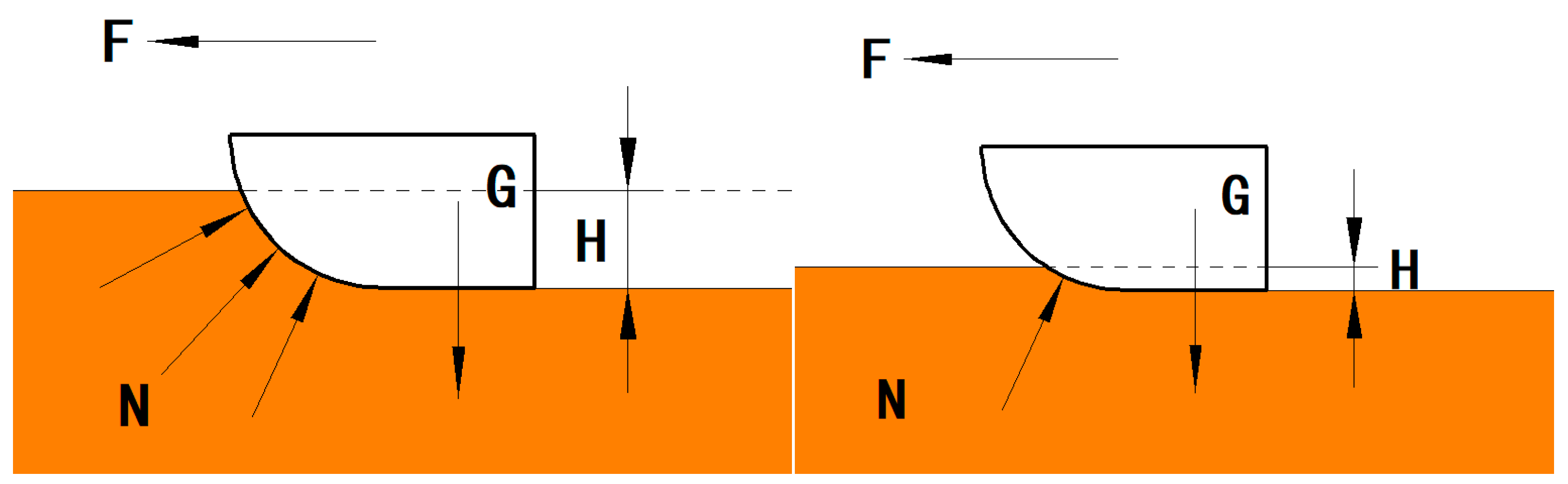
2.1. Working Principle
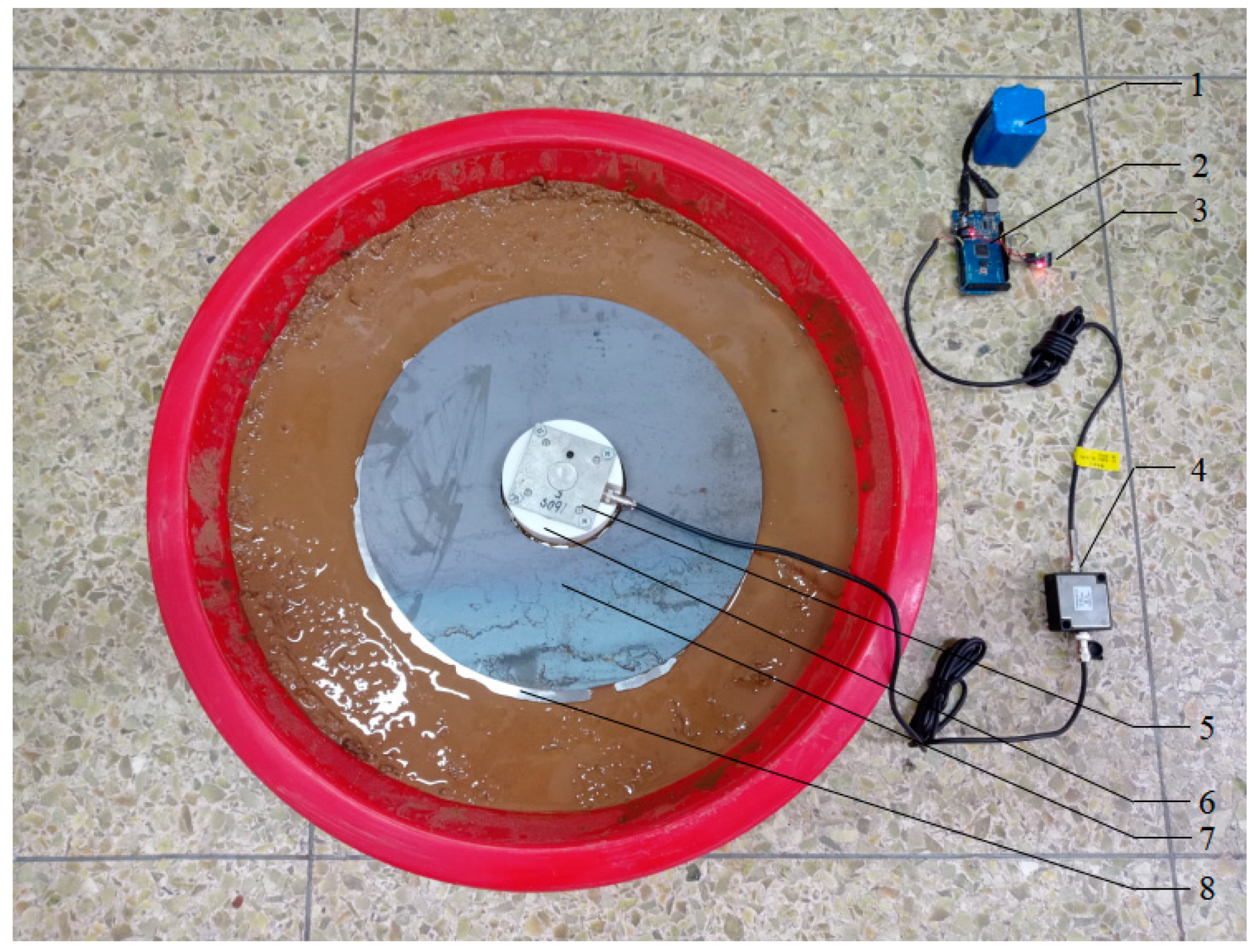
2.2. Ground Pressure Calibration Device
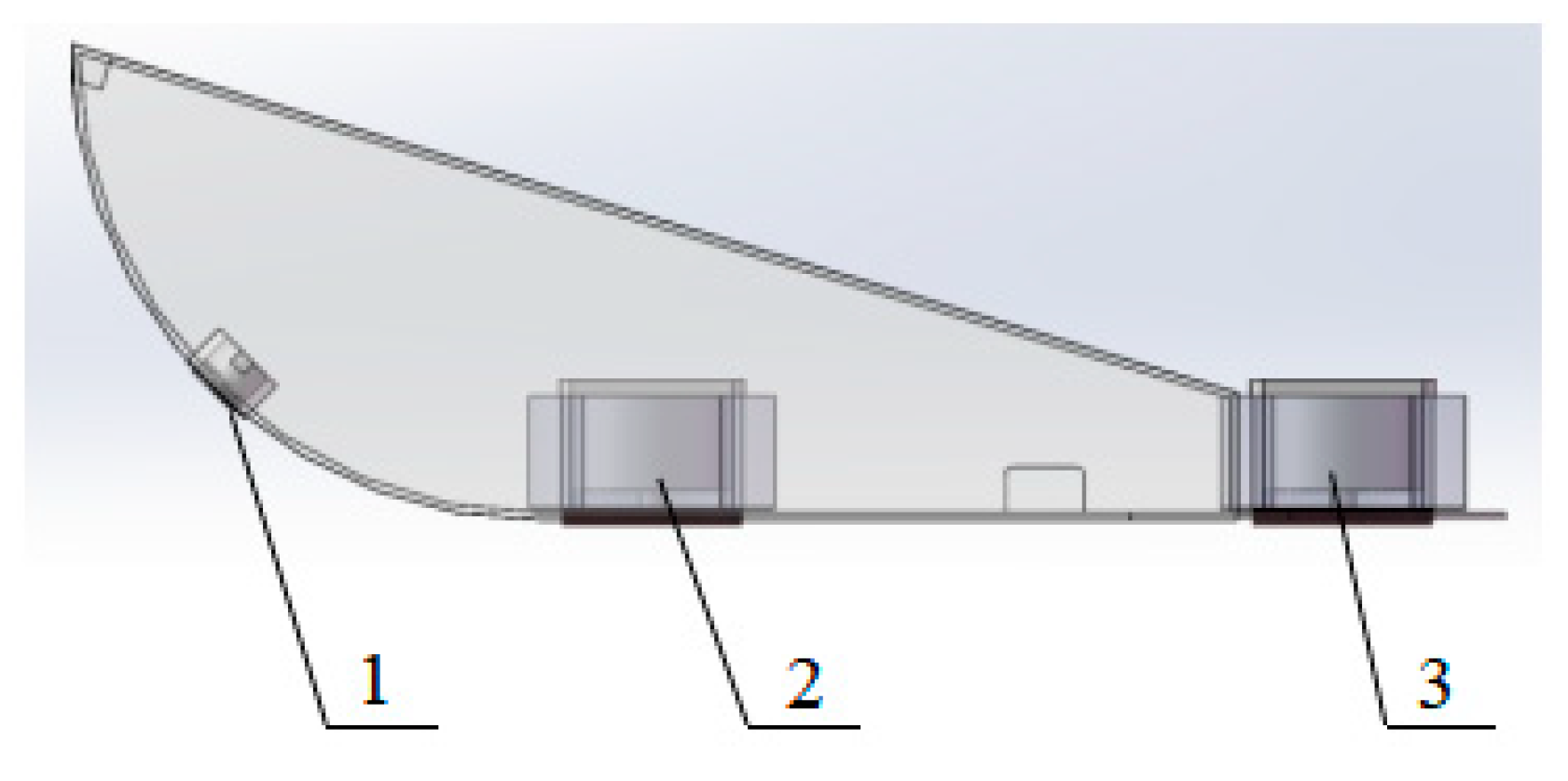
2.3. Design of Key Components
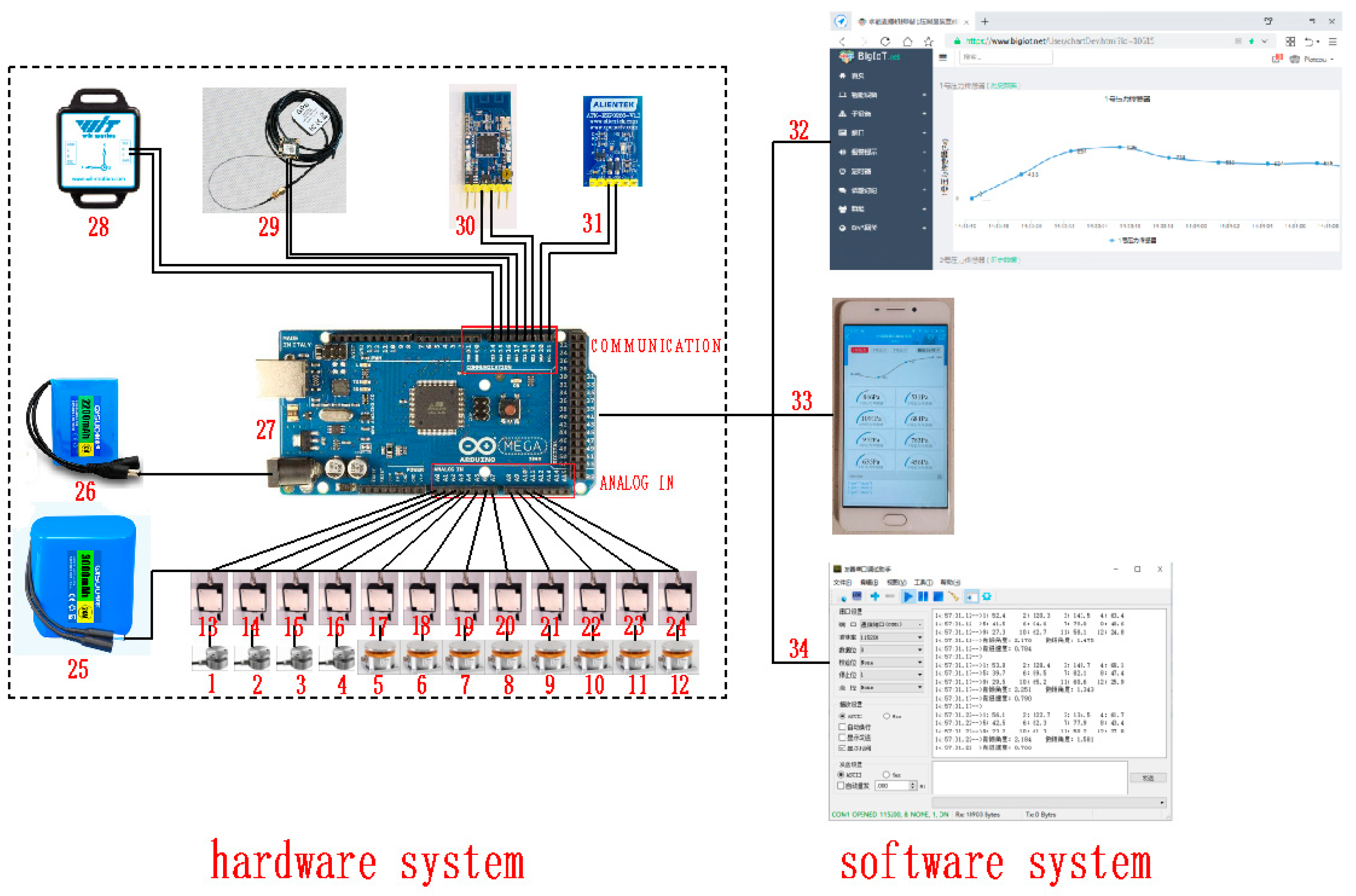
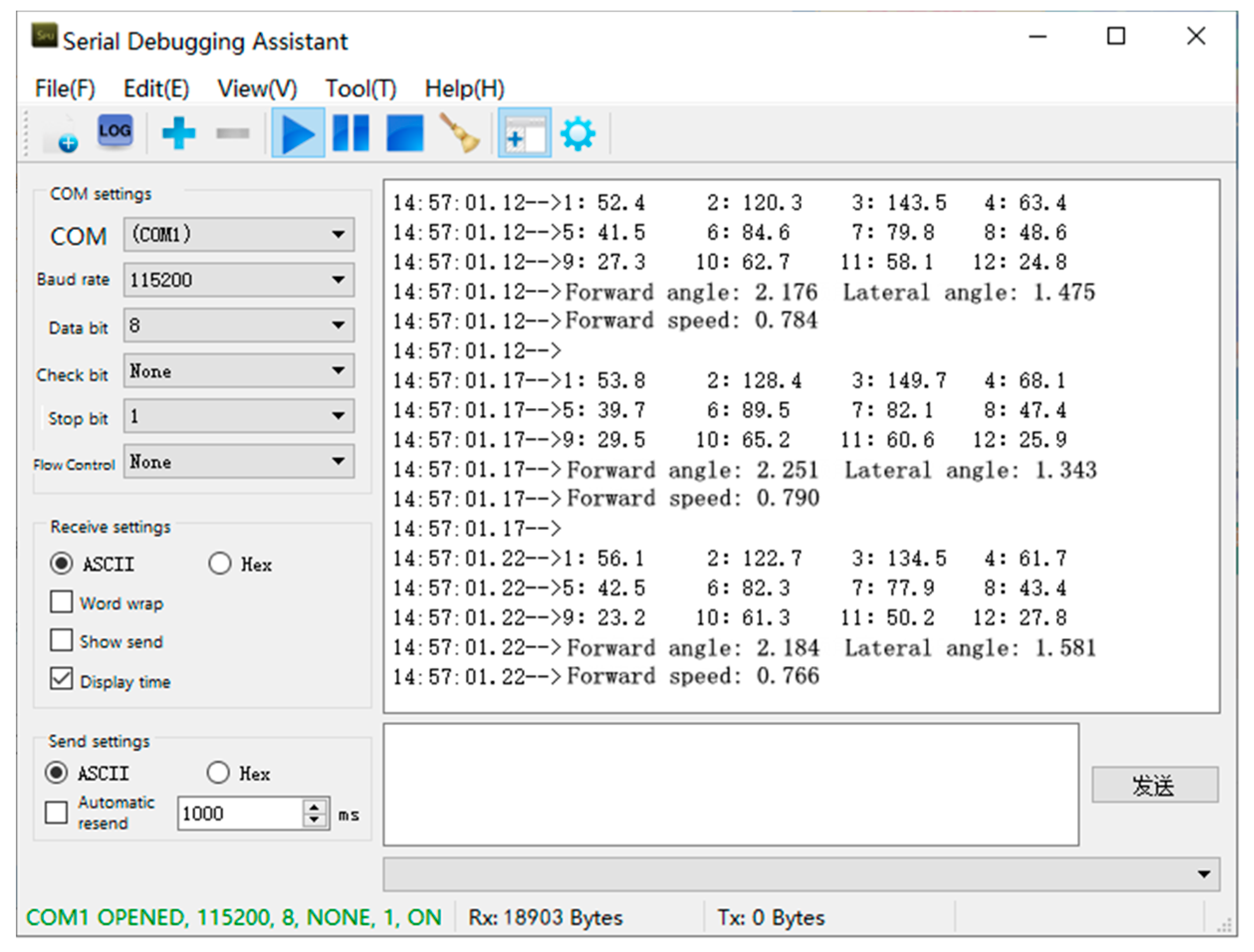
2.3.1. Wireless Serial Communication Measurement System
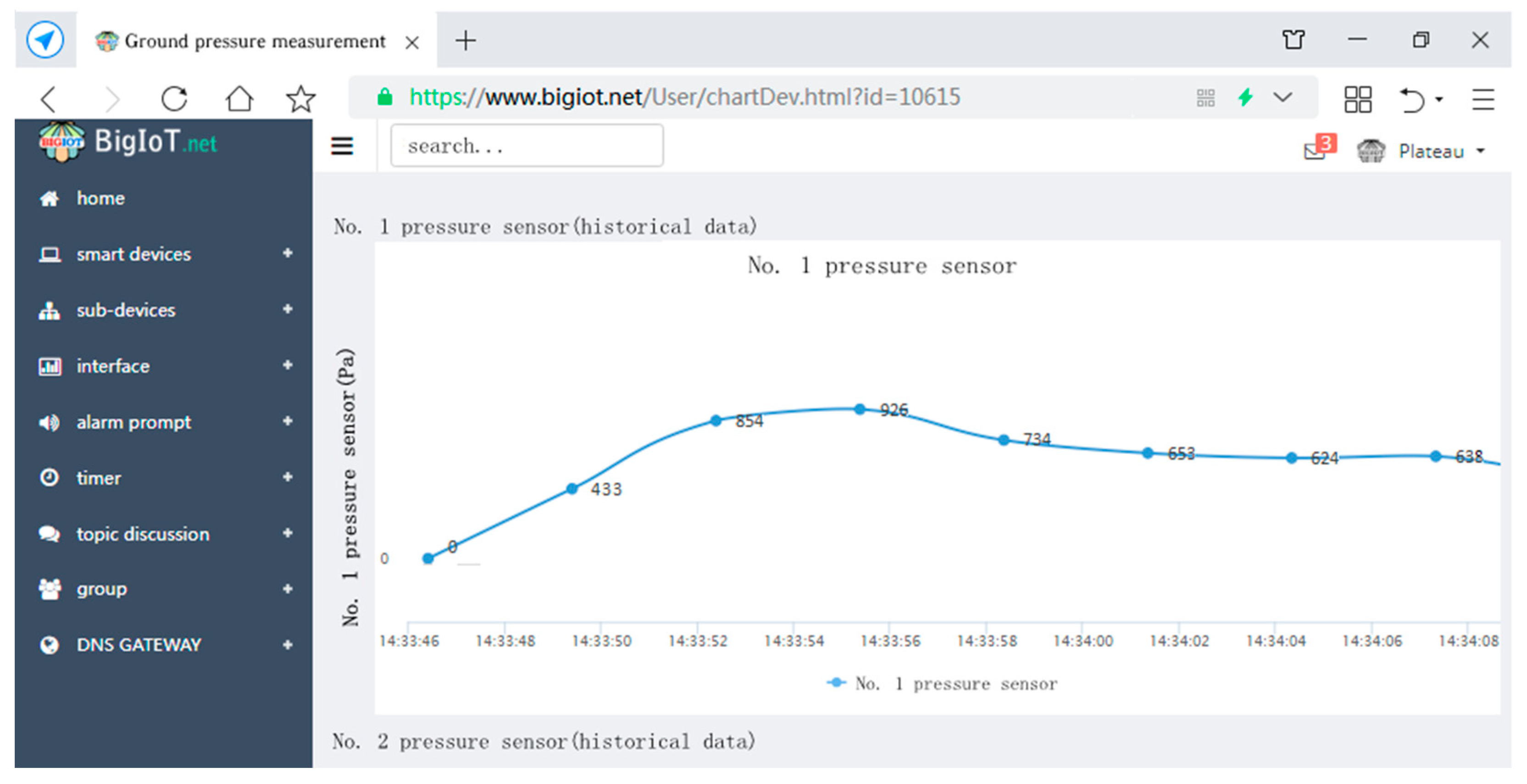
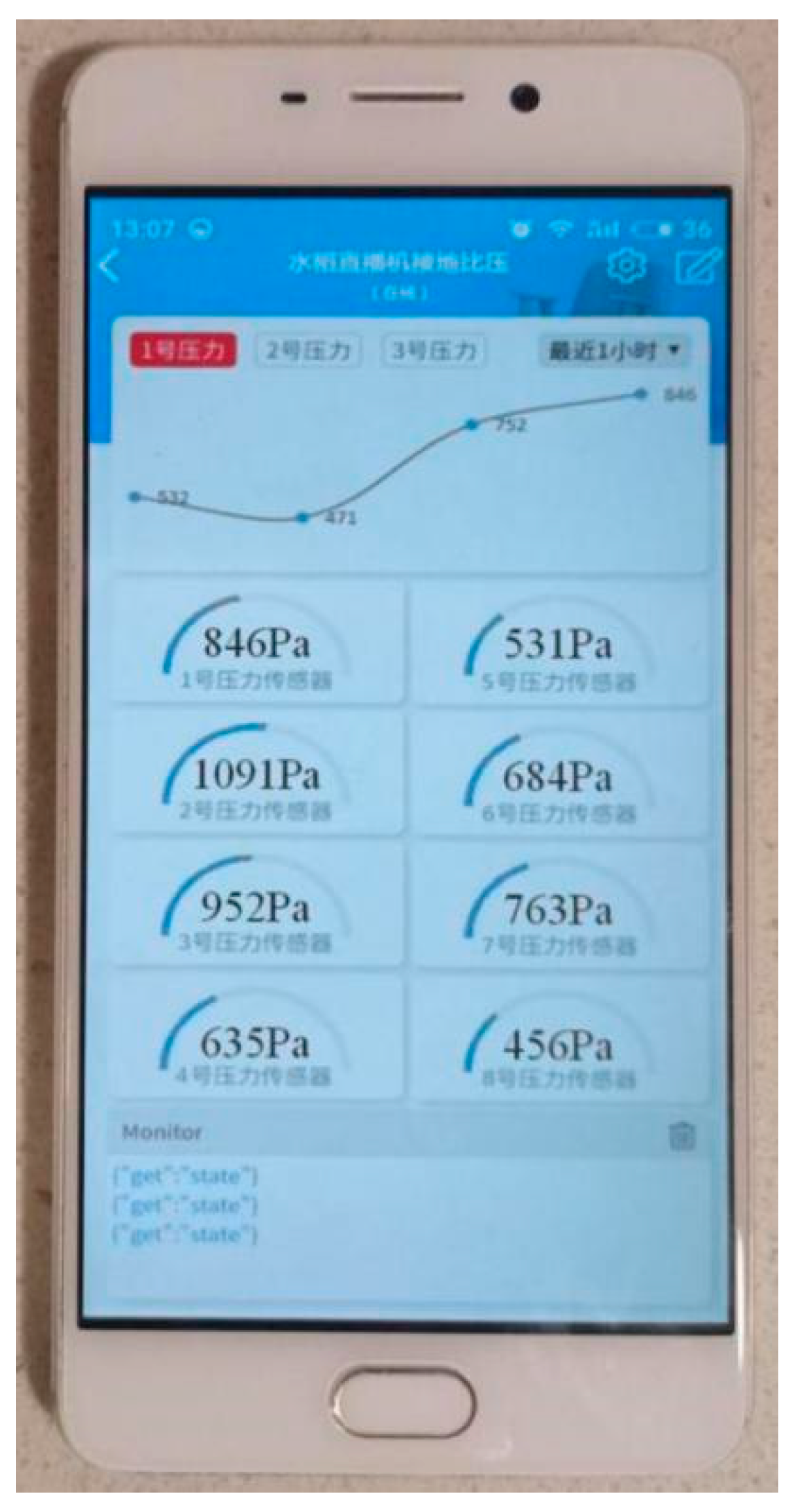
2.3.2. Internet of Things Measurement System
2.4. Field Experiment
2.4.1. Experimental Conditions
2.4.2. Experimental Design
2.4.3. Experimental Process
3. Results
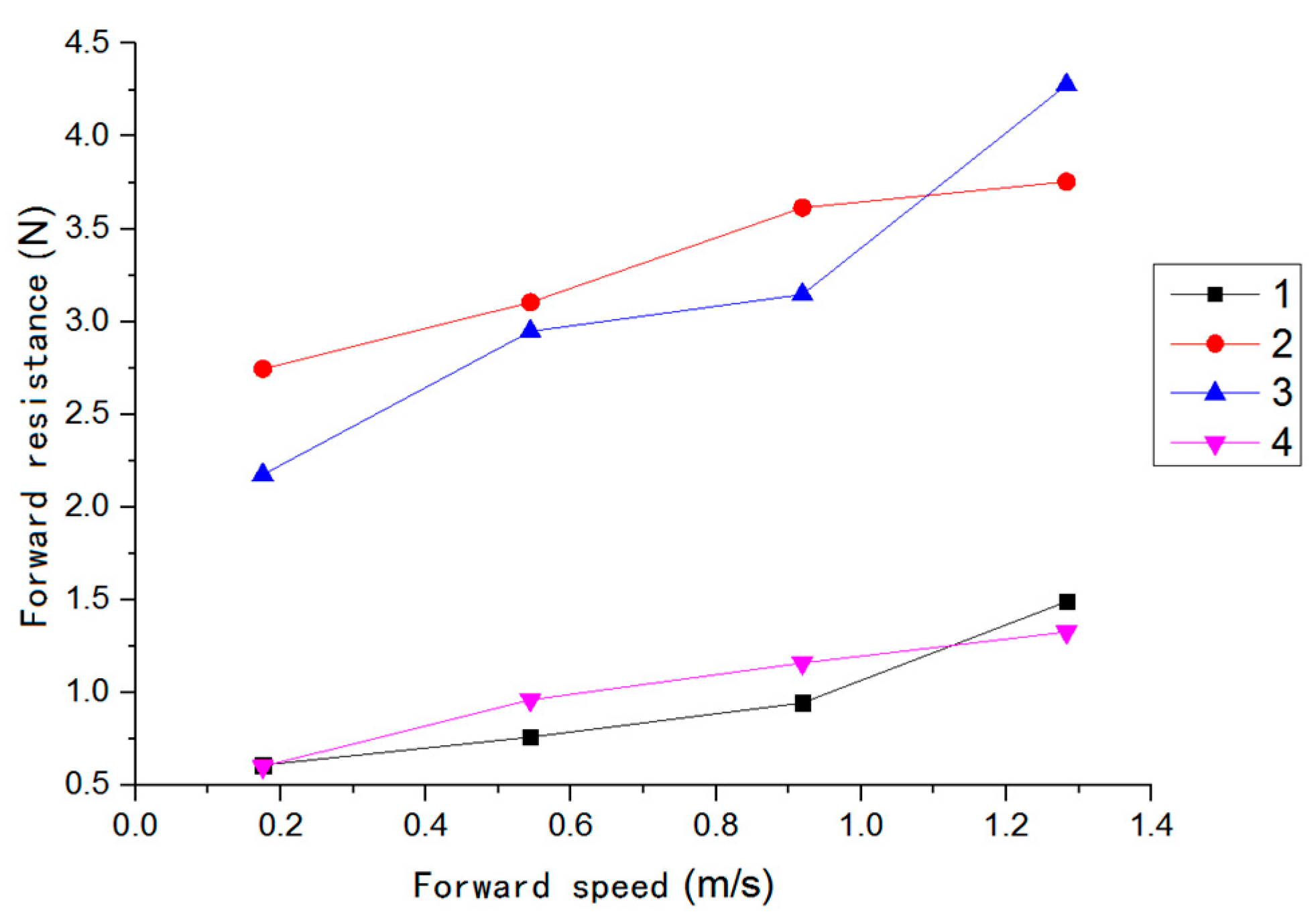
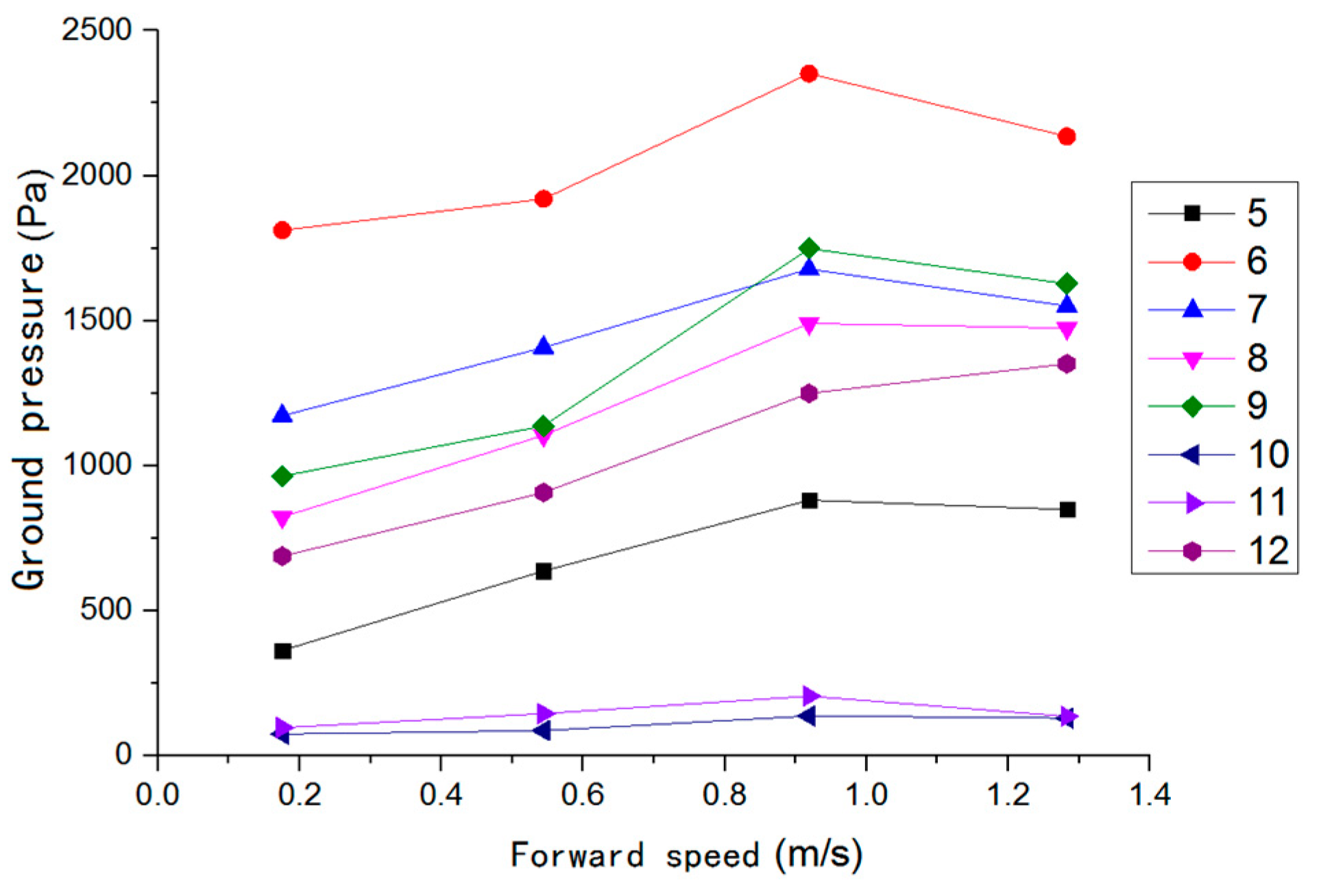
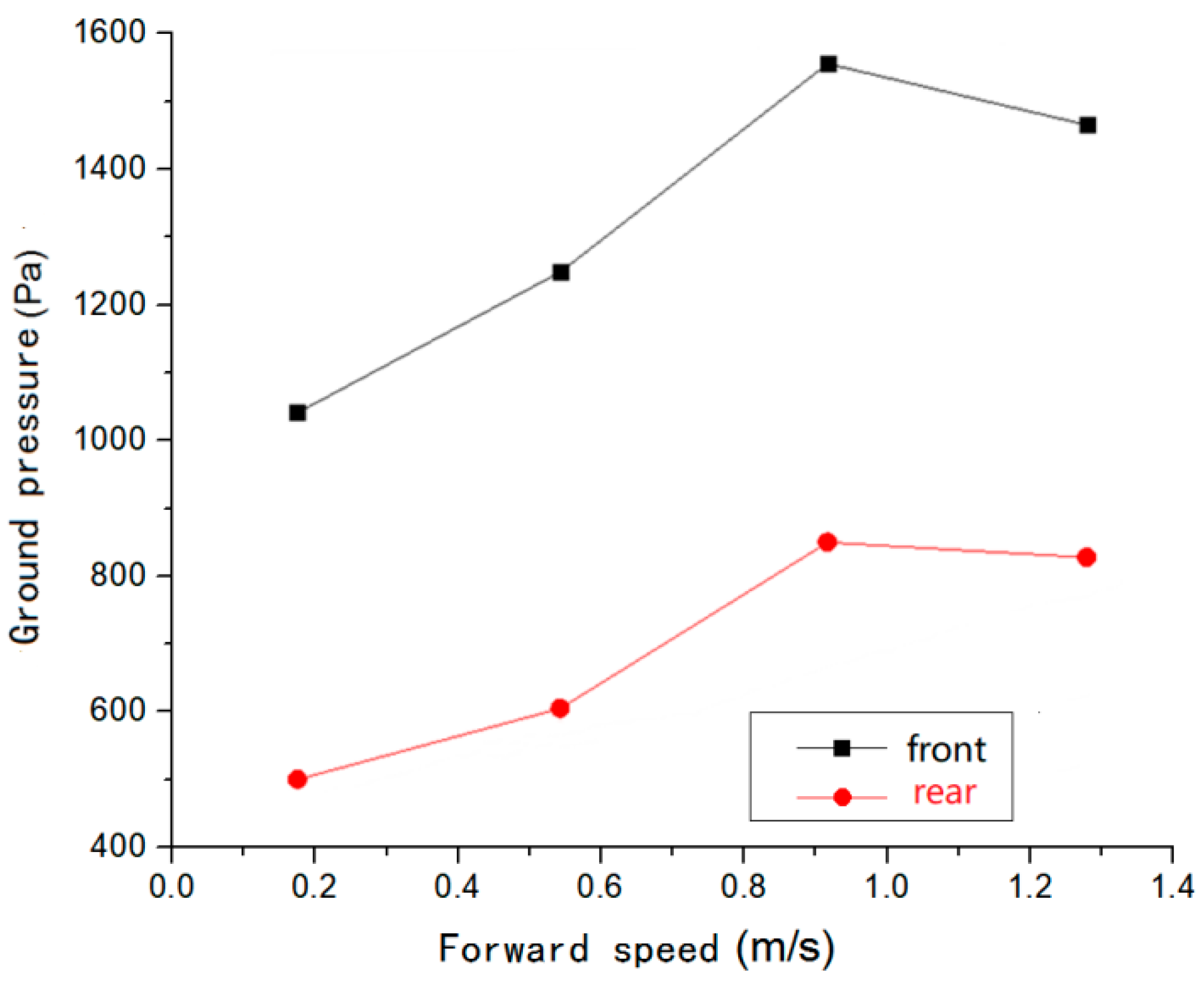
3.1. The Relationship between Forward Resistance, Ground Pressure, and Forward Speed
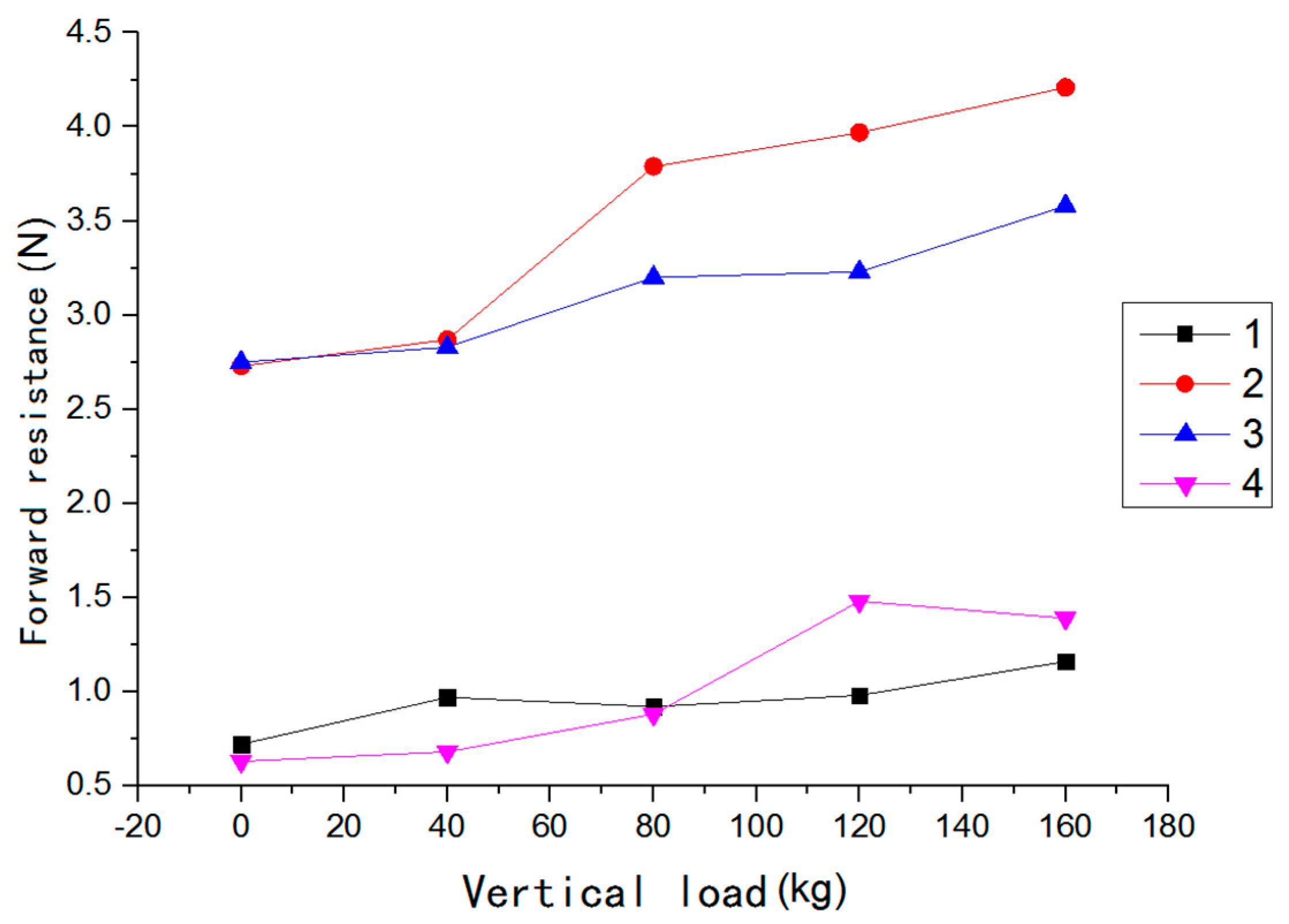
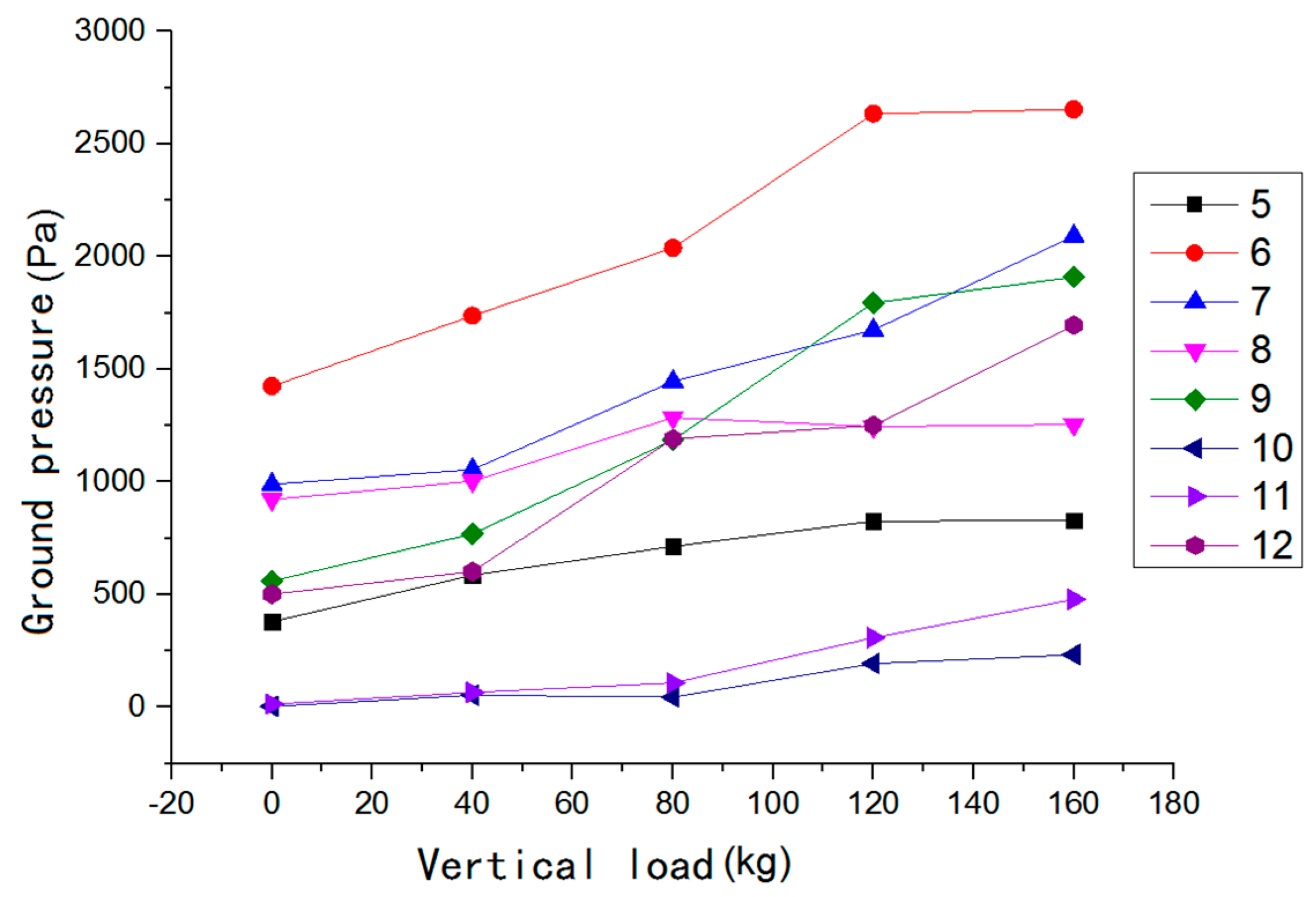
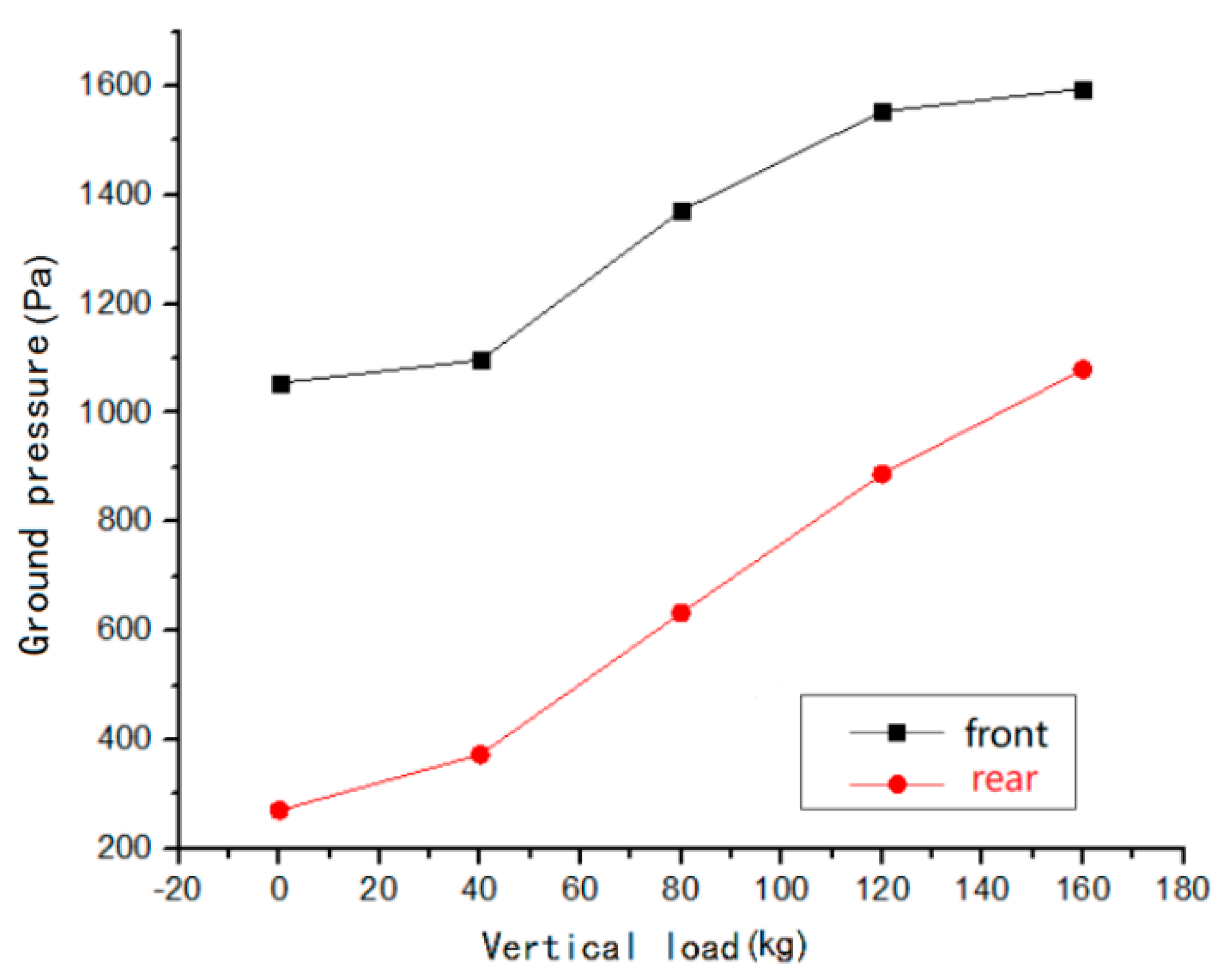
3.2. Relationship between Forward Resistance, Ground Pressure, and Vertical Load
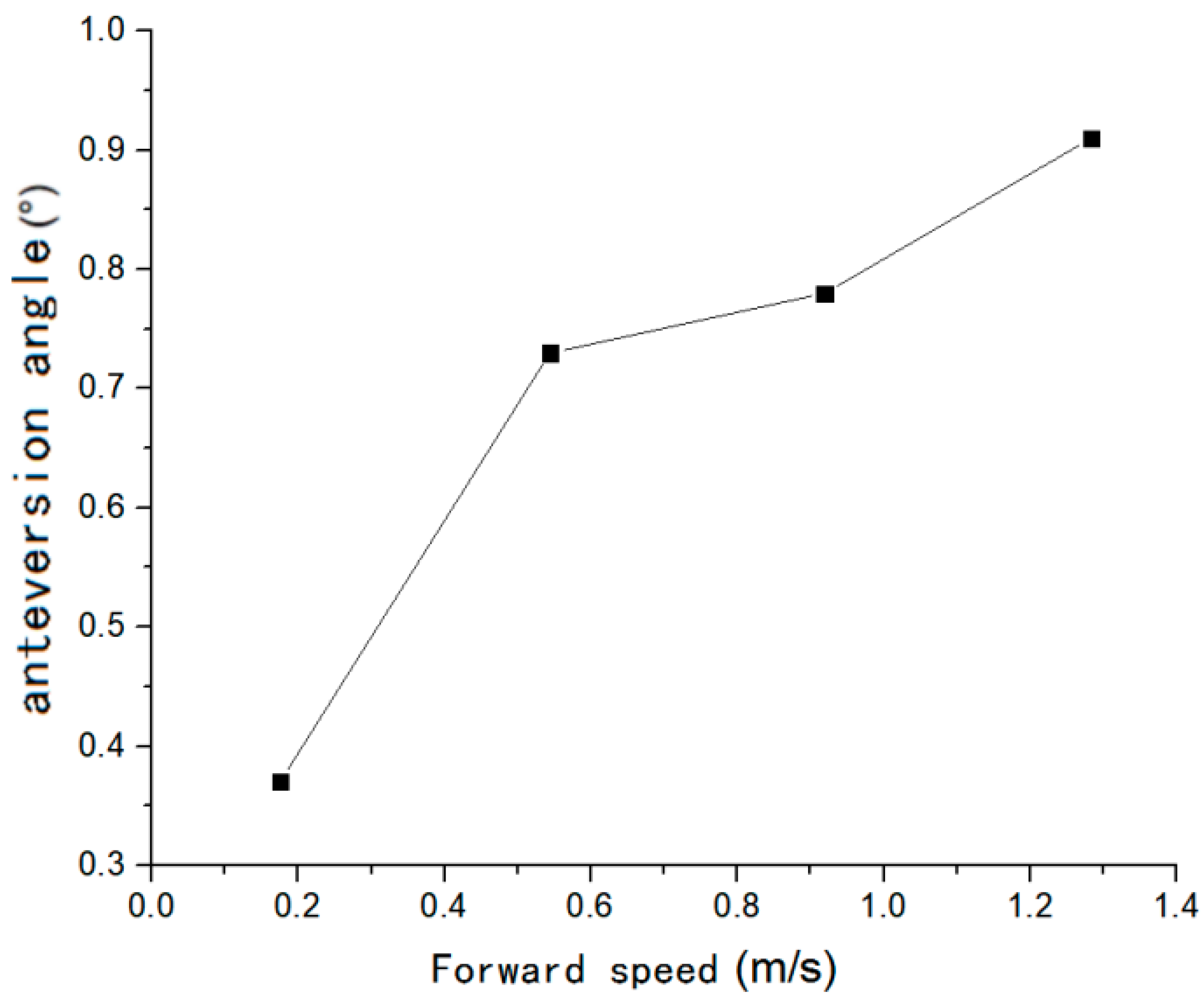
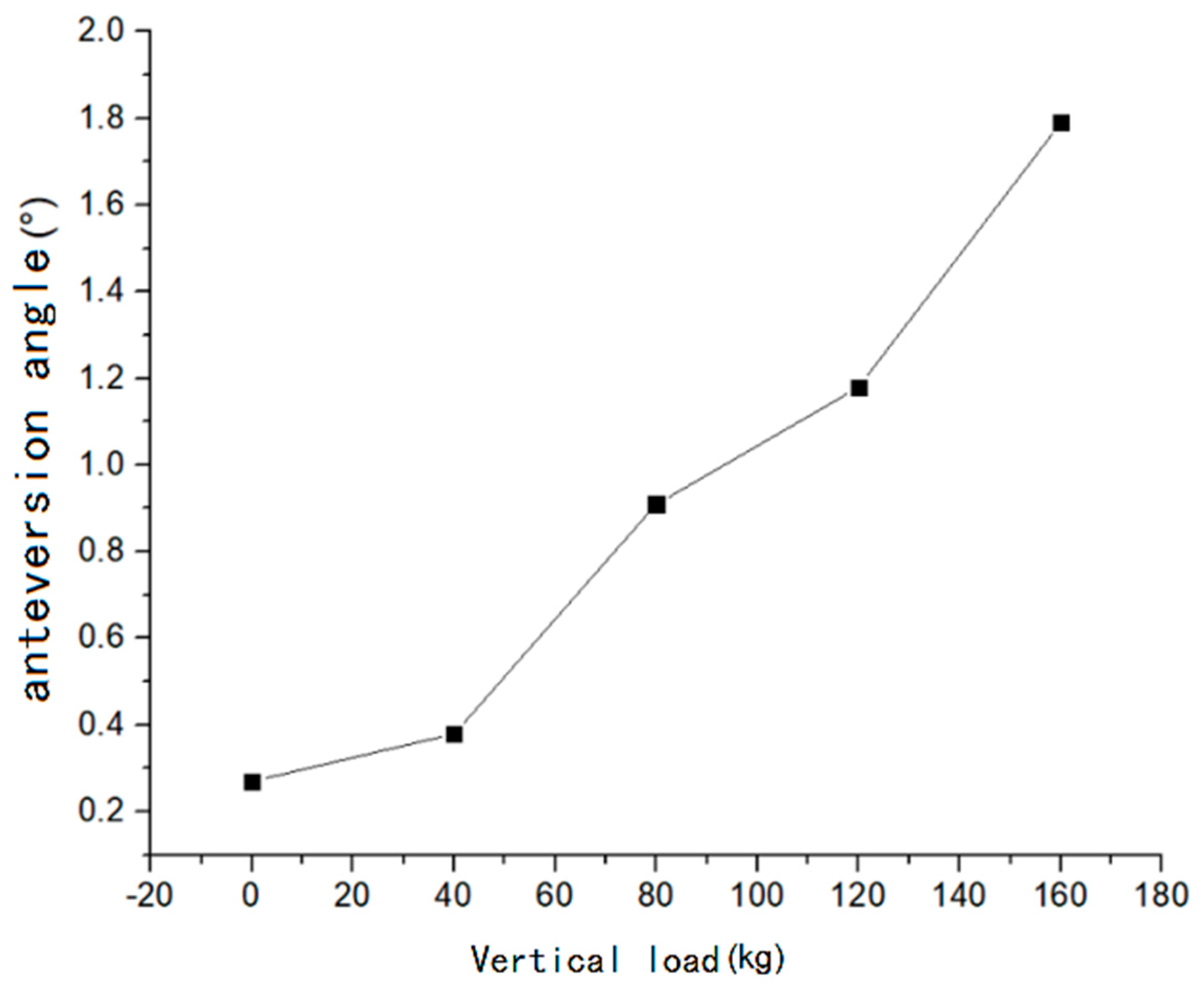
3.3. The Relationship between Forward Inclination Angle, Forward Speed and Vertical Load
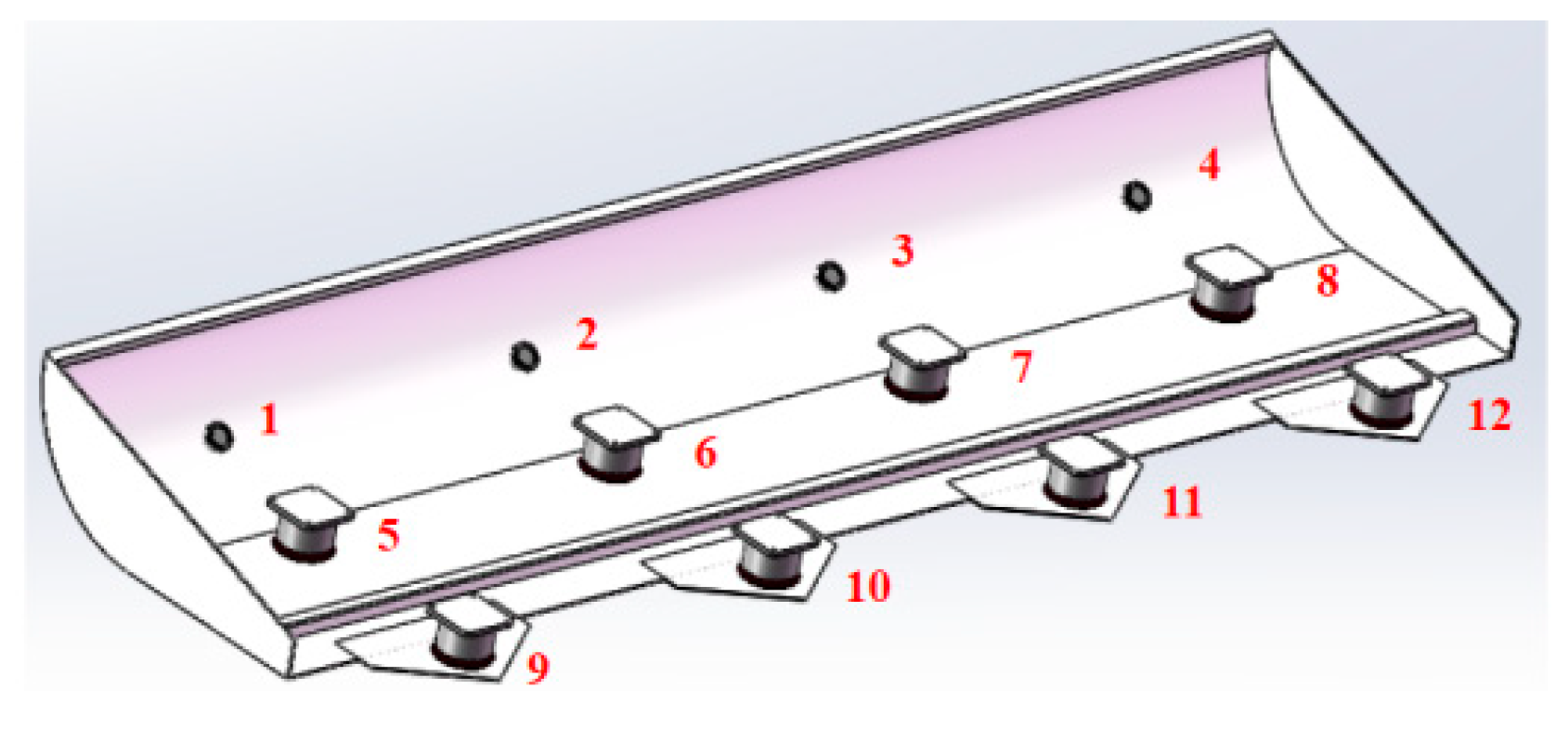
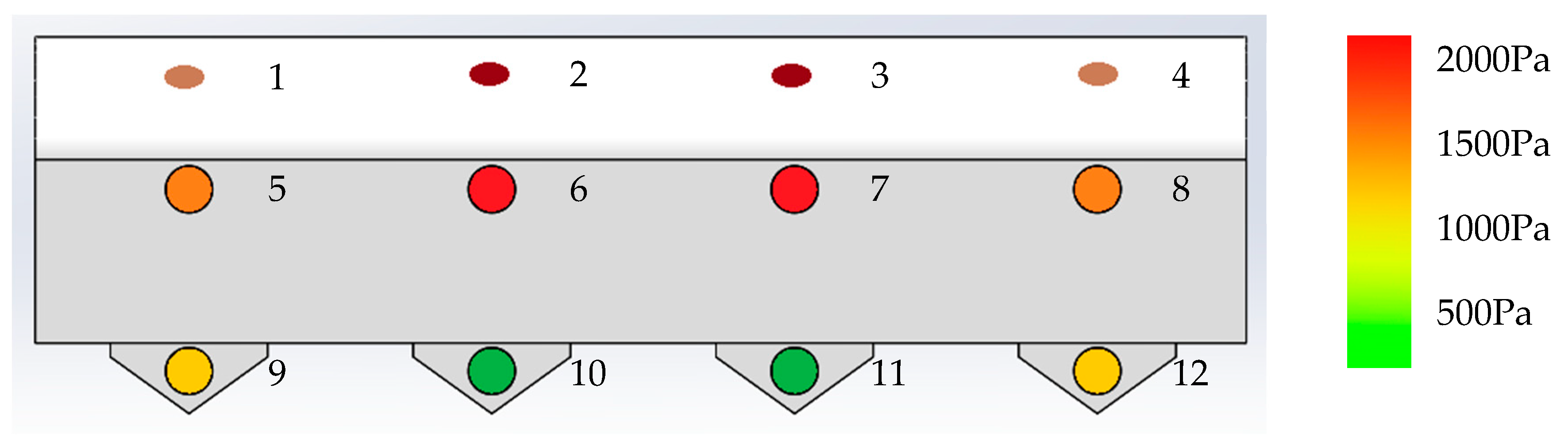
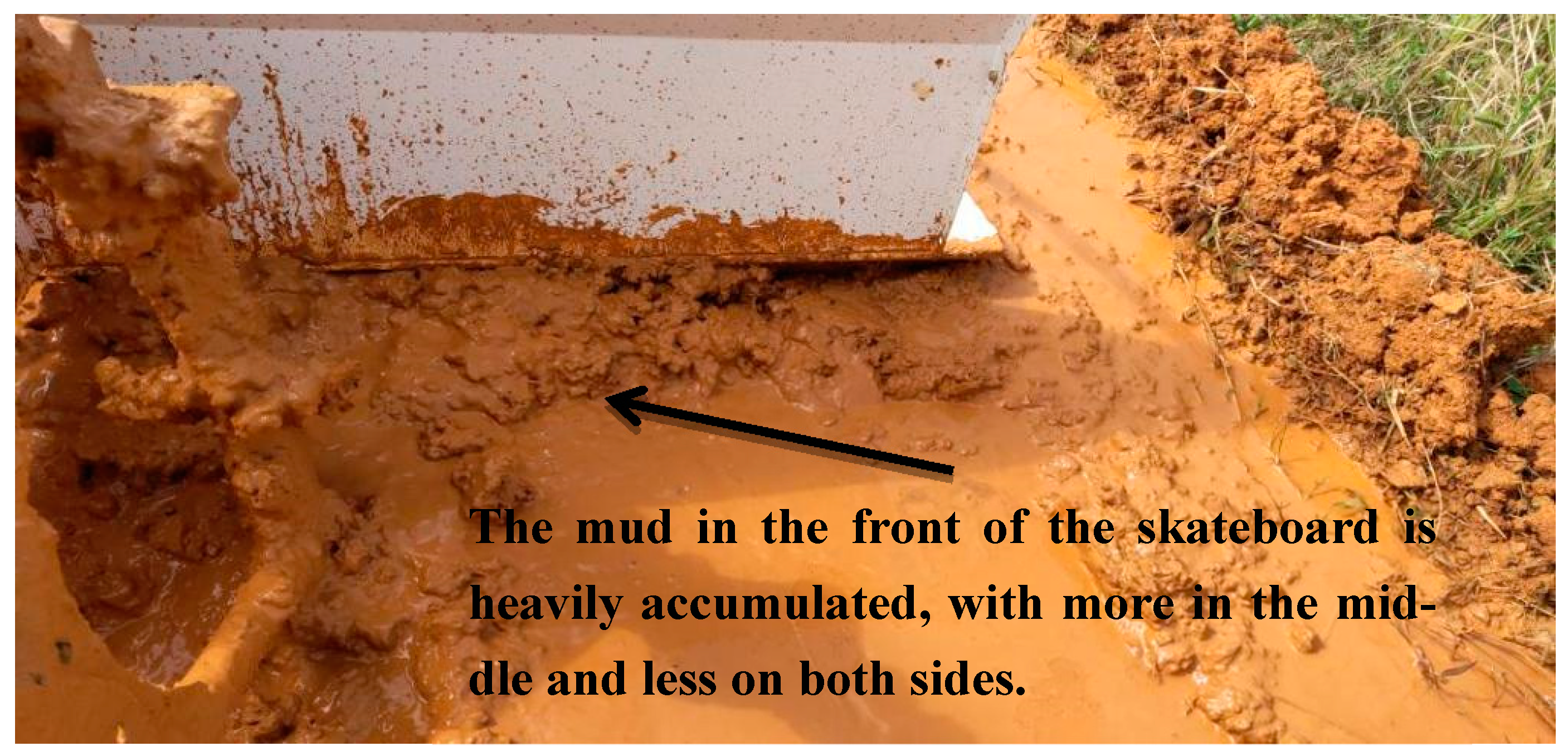
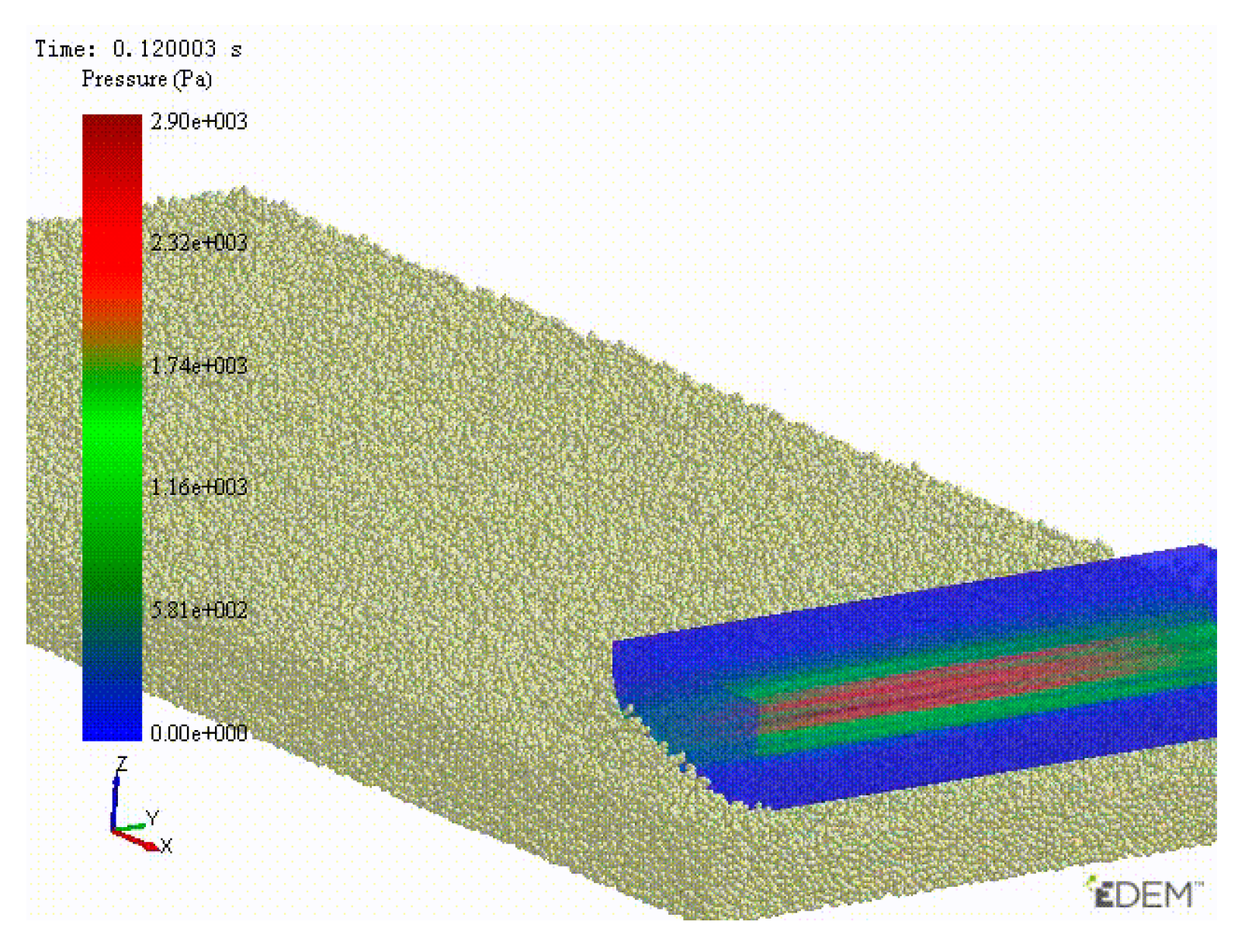
3.4. Distribution Law of Ground Pressure at the Bottom of Skateboard
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xin, F.; Xiao, X.; Dong, J.; Zhang, G.; Li, B. Large increases of paddy rice area, gross primary production, and grain production in Northeast China during 2000–2017. Sci. Total. Environ. 2019, 711, 135–183. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Li, X.; Liu, Y. Cultivated land protection and rational use in China. Land Use Policy. 2021, 106, 1–3. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, W.; Zhang, X.; Ma, Z. The Development of Budded Rice Direct Seeding Machine. China. Agric. Mech. 2005, 6, 7–12. [Google Scholar]
- Lv, X.R.; Lv, X.L.; Ren, W. Experimental study on working performance of rice rope direct seeding machine. Agric. Sci. China. 2010, 9, 275–279. [Google Scholar]
- Ye, H.; Chen, H.; Zhu, D.; Chen, Y.; Xu, Y. Yield and Application of direct seeding mechanization technology of hybrid rice. China. Rice. 2009, 5, 38–40. [Google Scholar]
- Luo, X.; Li, X.; Liu, T.; Tan, M. Present situation and development prospect of rice mechanical direct seeding. In Proceedings of the Annual Meeting of Chinese Society of Agricultural Engineering, Wuhan, China, 24–27 October 2016. [Google Scholar]
- Liu, Y. Soil Traffichability Study Based on Mechanical Properties of Paddy Soil. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, June 2014. [Google Scholar]
- Liu, K. Paddy field operation skills of rotary tiller. Hunan Agric. Mach. 2011, 12, 28. [Google Scholar]
- Lei, W.; Yi, L.; Cong, W.; Ling, W. Driving performance of bearing pressure-sinkage plates based on SPH. J. Agric. Mech. Res. 2021, 43, 5–7. [Google Scholar]
- Zheng, P.; Fang, C.; Juan, H. The modified rheological model for paddy soils in South China after remoulding. J. Terramechanics 1990, 27, 4–7. [Google Scholar]
- Deng, Z.; Zhu, Z.; Zeng, X.; Kong, G. Study of rheological properties of the lacustrine soft soil under different stress level. Ind. Constr. 2014, 44, 67–72. [Google Scholar]
- Ram, R.B.; Gupta, C.P. Relationship Between rheological coefficients and soil parameters in compression test. Trans. ASAE 1972, 15, 1054–1058. [Google Scholar] [CrossRef]
- He, Z. Experiment of Structures and Working Parameters Optimization for Paddy Field Boat-Type Tractor. Master’s Thesis, Zhejiang University, Hangzhou, China, June 2018. [Google Scholar]
- Wu, G.A. Preliminary study on the measurement of hull grounding pressure of tractor. J. Zhejiang Univ. Agric. Life Sci. 1984, 351. [Google Scholar]
- Yan, B.; Liu, Z.; Ma, L.; Yang, Z.; Li, W.; Fan, X.A. Dynamic Measuring Device for Specific Pressure of Crawler Grounding. China Patent No.202010951243.9.
- Eisenkolb, U.; Eckhoff, D.; Kaspari, A. Ground Pressure Measuring Device and Method for Evaluation. European Patent No.1722185, 31 December 2008. [Google Scholar]
- Zou, Y. Design and Experiment of the Test System for Ground Pressure of Seeding Pallet of Rice Direct Seeder. Master’s Thesis, Huazhong Agricultural University, Wuhan, China, June 2017. [Google Scholar]
- Soy, H.; Toy, İ. Design and implementation of smart pressure sensor for automotive applications. Measurement 2021, 176, 109–184. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Model | Operating Voltage | Output | Measuring Range | Measurement Accuracy |
|---|---|---|---|---|---|
| Forward resistance sensor | JHBM-H3 | 5–10 V | 350 ± 3Ω | 0–5 kg | ±0.1% |
| Ground pressure sensor | JHBS-1–5KG | 5–10 V | 350 ± 3Ω | 0–5 kg | ±0.1% |
| Signal amplifier | BSQ-3 | 24 V | 0 ± 5 V | 0~700 Ω | ±0.05% |
| 9-axis attitude sensor | WTGAHRS1 | 3.0–5.5 V | Serial communication | ±180° | ±0.1° |
| GPS module | ATGM332D | 3.0–5.5 V | Serial communication | 0~515 m/s | <0.1 m/s |
| Wireless serial communication module | CC2530 | 3.0–5.5 V | Serial communication | 250 m | ±0.1% |
| Number of Counterweights | Total Mass (kg) | Theoretical Ground Pressure (Pa) | Actual Ground Pressure (Pa) | Error (%) |
|---|---|---|---|---|
| 0 | 3.854 | 306.69 | 310.32 | 1.18% |
| 1 | 6.258 | 498.00 | 505.46 | 1.50% |
| 2 | 8.662 | 689.30 | 694.15 | 0.70% |
| 3 | 11.066 | 880.60 | 887.13 | 0.74% |
| 4 | 13.470 | 1071.91 | 1079.45 | 0.70% |
| 5 | 15.874 | 1263.21 | 1270.33 | 0.56% |
| 6 | 18.278 | 1454.52 | 1462.81 | 0.57% |
| 7 | 20.682 | 1645.82 | 1648.17 | 0.14% |
| 8 | 23.086 | 1837.13 | 1831.71 | −0.30% |
| 9 | 25.490 | 2028.43 | 2019.19 | −0.46% |
| 10 | 27.894 | 2219.73 | 2203.88 | −0.71% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Zhang, G.; Wang, H.; Salem, A.; Fu, J.; Zhou, Y. Measuring System Design and Experiment for Ground Pressure on Seeding Skateboard of Rice Direct Seeding Machine. Appl. Sci. 2021, 11, 10024. https://doi.org/10.3390/app112110024
Gao Y, Zhang G, Wang H, Salem A, Fu J, Zhou Y. Measuring System Design and Experiment for Ground Pressure on Seeding Skateboard of Rice Direct Seeding Machine. Applied Sciences. 2021; 11(21):10024. https://doi.org/10.3390/app112110024
Chicago/Turabian StyleGao, Yuan, Guozhong Zhang, Hongchang Wang, Abouelnadar Salem, Jianwei Fu, and Yong Zhou. 2021. "Measuring System Design and Experiment for Ground Pressure on Seeding Skateboard of Rice Direct Seeding Machine" Applied Sciences 11, no. 21: 10024. https://doi.org/10.3390/app112110024