Review of Adaptive Shock Control Systems

 , and
, and
Abstract
:1. Introduction
2. Literature Review of Adaptive Concepts for Shock Control
2.1. Preformed Spoiler Concepts
2.1.1. One-Actuator Concept
2.1.2. Two-Actuator Concept
2.2. Shock Control Concepts Using Multiple Actuators or Adaptive Elements
2.2.1. Fish-Mouth Actuator
Actuator Geometry and Structural Design
2.2.2. Tube Spring Actuator
2.2.3. Pressurized Chambers
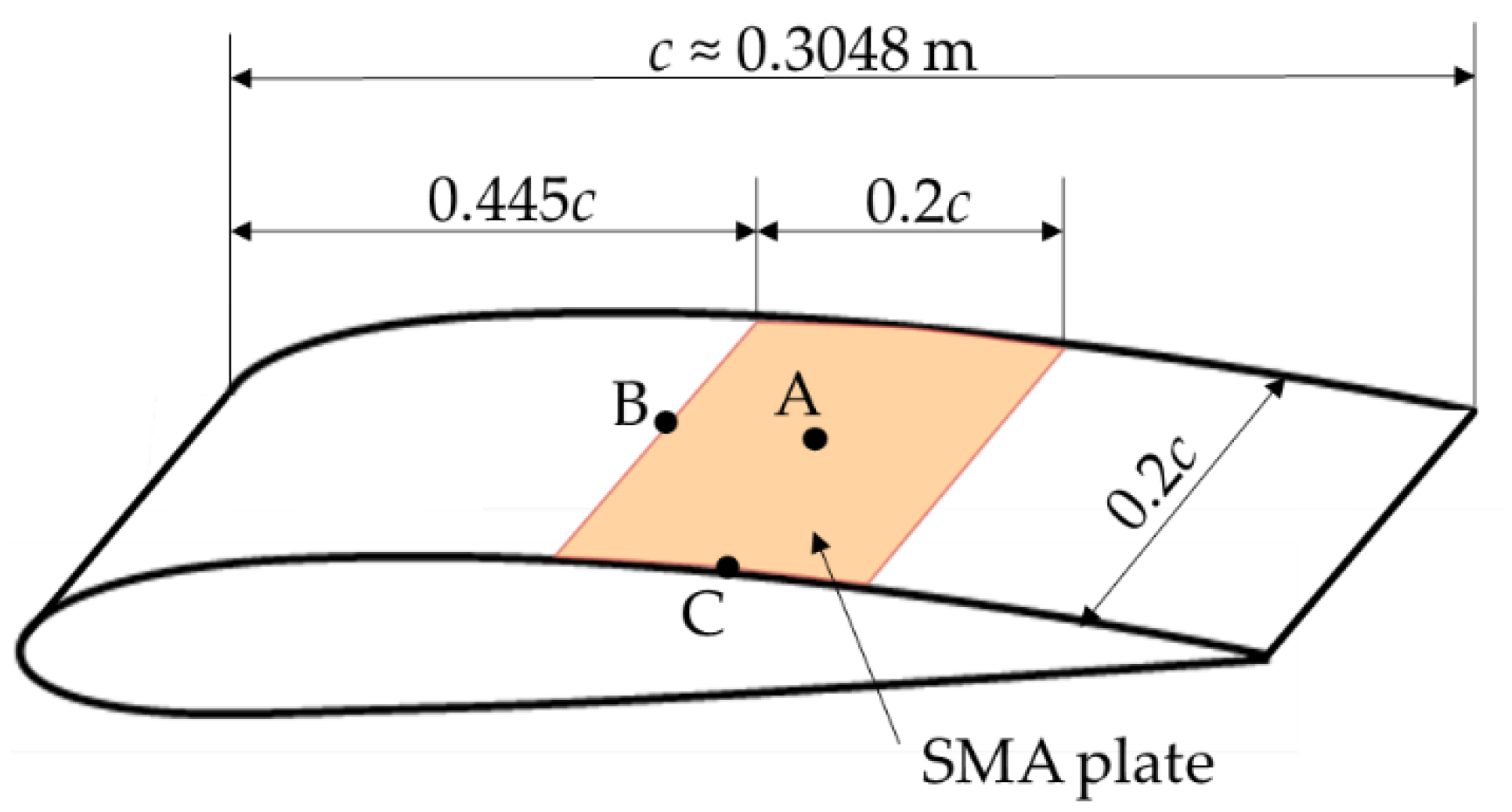
2.2.4. SMA Plate
2.3. Using Pressure Differences in the Shock Region
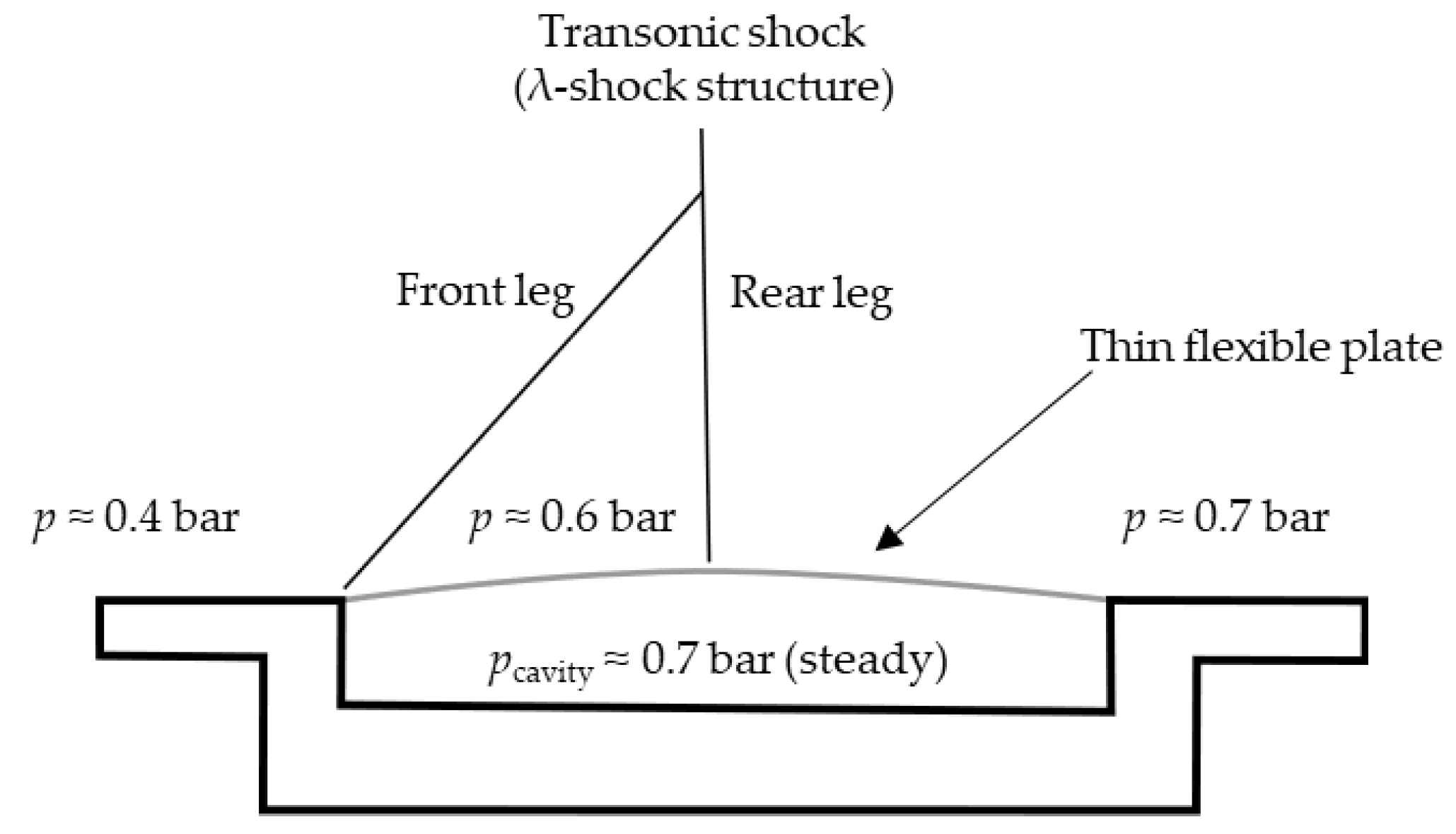
2.3.1. Thin Flexible Plate
2.3.2. Actuated Thin Flexible Plate
2.3.3. Thin Flexible Plate with Two Actuation Points
2.4. Compliant Structures with One Actuator
2.5. Plasma Heating Elements
3. Discussion
3.1. Concept 1—Perforated Skin/Porosity (Passive Approach)
3.1.1. Advantages
3.1.2. Challenges
3.2. Concept 2—Preformed Spoiler
3.2.1. Advantages
3.2.2. Challenges
3.3. Concept 3—SMA Wire Bundle Actuators
3.3.1. Advantages
3.3.2. Challenges
3.4. Concept 4—SMA Plate
3.4.1. Advantages
3.4.2. Challenges
3.5. Concept 5—Pressure-Actuated Concepts
3.5.1. Advantages
3.5.2. Challenges
3.6. Concept 6—Thin Flexible Plate Deformation by Airflow Pressure Differences
3.6.1. Advantages
3.6.2. Challenges
3.7. Concept 7—Compliant Structures
3.7.1. Advantages
3.7.2. Challenges
3.8. Concept 8—Shock Mitigation with Plasma
3.8.1. Advantages
3.8.2. Challenges
3.9. Comparative Table of SCB Concepts
4. Conclusions
5. Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 2D | Two-dimensional |
| 3D | Three-dimensional |
| BMWi | Federal Ministry of Economic Affairs and Energy (of Germany) |
| CFRP | Carbon fiber reinforced polymer |
| ERA | Environmentally Responsible Aviation |
| FE | Finite-element |
| FKZ | Grant number (DE: Förderkennzeichen) |
| FSI | Fluid-structure interaction |
| GFRP | Glass fiber reinforced polymer |
| HLFC | Hybrid laminar flow control |
| LE | Leading edge |
| LDAinOp | Low Drag Aircraft in Operation |
| LuFo | Federal Aeronautical Research Program |
| NASA | National Aeronautics and Space Administration |
| NiTi | Nickel-titanium |
| p | Pressure |
| SCB | Shock control bump |
| SMA | Shape memory alloy |
| TE | Trailing edge |
| VC | Variable camber |
References
- Kommission, E. (Ed.) Flightpath 2050: Europe’s Vision for Aviation; Maintaining Global Leadership and Serving Society’s Needs; Report of the High-Level Group on Aviation Research; Policy/European Commission; European Union: Luxembourg, 2011; ISBN 978-92-79-19724-6.
- Collier, F.; Thomas, R.; Burley, C.; Nickol, C.; Lee, C.-M.; Tong, M. Environmentally Responsible Aviation—Real Solutions for Environmental Challenges Facing Aviation. In Proceedings of the 27th Congress of the International Council of the Aeronautical Sciences (ICAS 2010-1.6.1), Nice, France, 19–24 September 2010; Available online: http://www.icas.org/ICAS_ARCHIVE/ICAS2010/PAPERS/802.PDF (accessed on 12 January 2021).
- Bundesministerium für Wirtschaft und Energie (BMWi) Die Luftfahrtstrategie der Bundesregierung. Available online: https://www.bmwi.de/Redaktion/DE/Publikationen/Technologie/luftfahrtstrategie-der-bundesregierung.pdf?__blob=publicationFile&v=15 (accessed on 12 January 2021).
- Hainsch, K.; Göke, L.; Kemfert, C.; Oei, P.-Y.; Hirschhausen, C.V. European Green Deal: Using Ambitious Climate Targets and Renewable Energy to Climb out of the Economic Crisis. DIW Wkly. Rep. 2020. [Google Scholar] [CrossRef]
- Abbas, A.; de Vicente, J.; Valero, E. Aerodynamic technologies to improve aircraft performance. Aerosp. Sci. Technol. 2013, 28, 100–132. [Google Scholar] [CrossRef]
- Mayer, R. Buffet Control by Shock Control Bumps. Ph.D. Thesis, Institute of Aerodynamics and Gas Dynamics, University of Stuttgart, Stuttgart, Germany, 11 February 2019. [Google Scholar]
- Mayer, R.; Lutz, T.; Krämer, E.; Dandois, J. Control of Transonic Buffet by Shock Control Bumps on Wing-Body Configuration. J. Aircr. 2019, 56, 556–568. [Google Scholar] [CrossRef]
- Dang, H.; Zhao, J.; Yang, Z.; Dang, H. Postponing the Onset and Alleviating the Load of Transonic Buffet by Using Steady and Periodic Tangential Slot Blowing. Appl. Sci. 2019, 9, 4132. [Google Scholar] [CrossRef] [Green Version]
- Giannelis, N.F.; Vio, G.A.; Levinski, O. A review of recent developments in the understanding of transonic shock buffet. Prog. Aerosp. Sci. 2017, 92, 39–84. [Google Scholar] [CrossRef]
- Ashill, P.R.; Fulker, J.L.; Shires, A. A novel technique for controlling shock strength of laminar-flow aerofoil sections. In Proceedings of the First European Forum on Laminar Flow Technology, Hamburg, Germany, 16–18 March 1992; pp. 175–183. [Google Scholar]
- Dargel, G.; Rodde, A.M.; Archambaud, J.R. Assessment of the Capability of Drag Reduction of the Shock Control Device ‘SC Bump’ on Airfoil Flows and Application Aspects on Wings. In IUTAM Symposium on Mechanics of Passive and Active Flow Control; Meier, G.E.A., Viswanath, P.R., Eds.; Fluid Mechanics and its Applications; Springer: Dordrecht, The Netherlands, 1999; Volume 53, pp. 57–62. ISBN 978-94-010-5826-1. [Google Scholar] [CrossRef]
- Stanewsky, E.; Délery, J.; Fulker, J.; Geißler, W. EUROSHOCK—Drag Reduction by Passive Shock Control: Results of the Project EUROSHOCK, AER2-CT92-0049 Supported by the European Union, 1993–1995; Vieweg + Teubner Verlag: Wiesbaden, Germany, 1997; ISBN 978-3-322-90711-0. [Google Scholar] [CrossRef]
- Ashill, P.R.; Fulker, J.L. A Review of Flow Control Research at Dera. In IUTAM Symposium on Mechanics of Passive and Active Flow Control; Meier, G.E.A., Viswanath, P.R., Eds.; Fluid Mechanics and its Applications; Springer: Dordrecht, The Netherlands, 1999; Volume 53, pp. 43–56. ISBN 978-94-010-5826-1. [Google Scholar] [CrossRef]
- Birkemeyer, J.; Rosemann, H.; Stanewsky, E. Shock control on a swept wing. Aerosp. Sci. Technol. 2000, 4, 147–156. [Google Scholar] [CrossRef]
- Sommerer, A.; Lutz, T.; Wagner, S. Numerical Optimisation of Adaptive Transonic Airfoils with Variable Camber; Optimage Ltd.: Harrogate, UK, 2000; Available online: http://icas.org/ICAS_ARCHIVE/ICAS2000/PAPERS/ICA2111.pdf (accessed on 12 January 2021).
- Stanewsky, E. (Ed.) Drag Reduction by Shock and Boundary Layer Control: Results of the Project EUROSHOCK II Supported by the European Union, 1996–1999; Notes on numerical fluid mechanics and multidisciplinary design; Springer: Berlin, Germany; New York, NY, USA, 2002; ISBN 978-3-540-43317-0. [Google Scholar]
- Fulker, J.L. A Review of Research at Qinetiq on the Control of Shock Waves. In IUTAM Symposium Transsonicum IV; Fluid Mechanics and its Applications; Sobieczky, H., Ed.; Springer: Dordrecht, The Netherlands, 2002; Volume 73, pp. 277–284. ISBN 978-94-010-3998-7. [Google Scholar] [CrossRef]
- Holden, H.A.; Babinsky, H. Shock/Boundary Layer Interaction Control Using 3D Devices. In Proceedings of the 41st Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 2003; American Institute of Aeronautics and Astronautics: Reno, NV, USA, 2003. [Google Scholar] [CrossRef]
- Kutzbach, M.; Lutz, T.; Wagner, S. Investigations on Shock Control Bumps for Infinite Swept Wings. In Proceedings of the 2nd AIAA Flow Control Conference, Portland, OR, USA, 28 June–1 July 2004; American Institute of Aeronautics and Astronautics: Portland, OR, USA, 2004. [Google Scholar] [CrossRef]
- Ogawa, H.; Babinsky, H. Evaluation of wave drag reduction by flow control. Aerosp. Sci. Technol. 2006, 10, 1–8. [Google Scholar] [CrossRef]
- Wong, W.S.; Qin, N.; Sellars, N.; Holden, H.; Babinsky, H. A combined experimental and numerical study of flow structures over three-dimensional shock control bumps. Aerosp. Sci. Technol. 2008, 12, 436–447. [Google Scholar] [CrossRef]
- Ogawa, H.; Babinsky, H.; Pätzold, M.; Lutz, T. Shock-Wave/Boundary-Layer Interaction Control Using Three-Dimensional Bumps for Transonic Wings. AIAA J. 2008, 46, 1442–1452. [Google Scholar] [CrossRef]
- Rhodes, O.; Santer, M. Structural Optimization of a Morphing Shock Control Bump. In Proceedings of the 52nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Denver, CO, USA, 4–7 April 2011; American Institute of Aeronautics and Astronautics: Denver, CO, USA, 2011; Volume AIAA, pp. 6039–6056. [Google Scholar] [CrossRef]
- Rhodes, O.; Santer, M. Aeroelastic Optimization of a Morphing 2D Shock Control Bump. In Proceedings of the 53rd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Honolulu, HI, USA, 23–26 April 2012; American Institute of Aeronautics and Astronautics: Honolulu, HI, USA, 2012; Volume AIAA, pp. 3402–3418. [Google Scholar] [CrossRef]
- Bruce, P.J.K.; Colliss, S.P. Review of research into shock control bumps. Shock Waves 2015, 25, 451–471. [Google Scholar] [CrossRef] [Green Version]
- Eastwood, J.P.; Jarrett, J.P. Toward Designing with Three-Dimensional Bumps for Lift/Drag Improvement and Buffet Alleviation. AIAA J. 2012, 50, 2882–2898. [Google Scholar] [CrossRef]
- Mayer, R.; Lutz, T.; Kraemer, E. A Numerical Study on the Ability of Shock Control Bumps for Buffet Alleviation. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017; American Institute of Aeronautics and Astronautics: Grapevine, TX, USA, 2017. [Google Scholar] [CrossRef]
- Raghunathan, S.; Early, J.M.; Tulita, C.; Benard, E.; Quest, J. Periodic transonic flow and control. Aeronaut. J. 2008, 112, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Geoghegan, J.A.; Giannelis, N.F.; Vio, G.A. A Numerical Investigation of the Geometric Parametrisation of Shock Control Bumps for Transonic Shock Oscillation Control. Fluids 2020, 5, 46. [Google Scholar] [CrossRef] [Green Version]
- Stanewsky, E. Aerodynamic benefits of adaptive wing technology. Aerosp. Sci. Technol. 2000, 4, 439–452. [Google Scholar] [CrossRef]
- Stanewsky, E. Adaptive wing and flow control technology. Prog. Aerosp. Sci. 2001, 37, 583–667. [Google Scholar] [CrossRef]
- Rhodes, O.; Santer, M. Optimal Problem Definition for Optimization of Morphing Structures. In Proceedings of the 51st AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Orlando, FL, USA, 12–15 April 2010; American Institute of Aeronautics and Astronautics: Orlando, FL, USA, 2010; Volume AIAA. [Google Scholar] [CrossRef]
- Barbarino, S.; Bilgen, O.; Ajaj, R.M.; Friswell, M.I.; Inman, D.J. A Review of Morphing Aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 823–877. [Google Scholar] [CrossRef]
- Vasista, S.; Tong, L.; Wong, K.C. Realization of Morphing Wings: A Multidisciplinary Challenge. J. Aircr. 2012, 49, 11–28. [Google Scholar] [CrossRef]
- Rhodes, O. Optimal Design of Morphing Structures. Ph.D. Thesis, Imperial College London—Department of Aeronautics, London, UK, 2012. Available online: https://core.ac.uk/download/pdf/19456363.pdf (accessed on 12 January 2021).
- De Gaspari, A.; Ricci, S. Knowledge-Based Shape Optimization of Morphing Wing for More Efficient Aircraft. Int. J. Aerosp. Eng. 2015, 2015, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Vasista, S.; De Gaspari, A.; Ricci, S.; Riemenschneider, J.; Monner, H.P.; van de Kamp, B. Compliant structures-based wing and wingtip morphing devices. Aircr. Eng. Aerosp. Technol. 2016, 88, 311–330. [Google Scholar] [CrossRef] [Green Version]
- Ajaj, R.M.; Beaverstock, C.S.; Friswell, M.I. Morphing aircraft: The need for a new design philosophy. Aerosp. Sci. Technol. 2016, 49, 154–166. [Google Scholar] [CrossRef] [Green Version]
- Botez, R.M.; Koreanschi, A.; Oliviu, S.G.; Mebarki, Y.; Mamou, M.; Tondji, Y.; Amoroso, F.; Pecora, R.; Lecce, L.; Amendola, G.; et al. Numerical and Experimental Testing of a Morphing Upper Surface Wing Equipped with Conventional and Morphing Ailerons. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017; American Institute of Aeronautics and Astronautics: Grapevine, TX, USA, 2017. [Google Scholar] [CrossRef]
- Ameduri, S.; Concilio, A. A shape memory alloy torsion actuator for static blade twist. J. Intell. Mater. Syst. Struct. 2019, 30, 2605–2626. [Google Scholar] [CrossRef]
- Sinapius, J.M. Adaptronics—Smart Structures and Materials; Springer GmbH: Berlin/Heidelberg, Germany, 2021; ISBN 978-3-662-61399-3. [Google Scholar] [CrossRef]
- Kintscher, M.; Wiedemann, M.; Monner, H.P.; Heintze, O.; Kühn, T. Design of a smart leading edge device for low speed wind tunnel tests in the European project SADE. Int. J. Struct. Integr. 2011, 2, 383–405. [Google Scholar] [CrossRef]
- Vasista, S.; Rose, M.; Monner, H.P. Optimization Tool Assessment for a Large-displacement Compliant Morphing Wing Leading Edge. In Proceedings of the 27th International Conference on Adaptive Structures and Technologies (ICAST 2016), Lake George, NY, USA, 3–5 October 2016. [Google Scholar]
- Vasista, S.; Riemenschneider, J.; van de Kamp, B.; Monner, H.P.; Cheung, R.C.M.; Wales, C.; Cooper, J.E. Evaluation of a Compliant Droop-Nose Morphing Wing Tip via Experimental Tests. J. Aircr. 2017, 54, 519–534. [Google Scholar] [CrossRef] [Green Version]
- Vasista, S.; Nolte, F.; Monner, H.P.; Horst, P.; Burnazzi, M. Three-dimensional design of a large-displacement morphing wing droop nose device. J. Intell. Mater. Syst. Struct. 2018, 29, 3222–3241. [Google Scholar] [CrossRef]
- Rudenko, A.; Hannig, A.; Monner, H.P.; Horst, P. Extremely deformable morphing leading edge: Optimization, design and structural testing. J. Intell. Mater. Syst. Struct. 2018, 29, 764–773. [Google Scholar] [CrossRef]
- De Gaspari, A.; Moens, F. Aerodynamic Shape Design and Validation of an Advanced High-Lift Device for a Regional Aircraft with Morphing Droop Nose. Int. J. Aerosp. Eng. 2019, 2019, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Cavalieri, V.; De Gaspari, A.; Ricci, S. Optimization of compliant adaptive structures in the design of a morphing droop nose. Smart Mater. Struct. 2020, 29, 075020. [Google Scholar] [CrossRef] [Green Version]
- Monner, H.P.; Breitbach, E.; Bein, T.; Hanselka, H. Design aspects of the adaptive wing—The elastic trailing edge and the local spoiler bump. Aeronaut. J. R. Aeronaut. Soc. 2000, 104, 89–95. [Google Scholar] [CrossRef]
- Vasista, S.; Riemenschneider, J.; Mendrock, T.; Monner, H.P. Pressure-Driven Morphing Devices for 3D Shape Changes with Multiple Degrees-of-Freedom. In Volume 1: Development and Characterization of Multifunctional Materials; Modeling, Simulation, and Control of Adaptive Systems; Integrated System Design and Implementation; American Society of Mechanical Engineers: San Antonio, TX, USA, 2018. [Google Scholar] [CrossRef]
- Della Vecchia, P.; Corcione, S.; Pecora, R.; Nicolosi, F.; Dimino, I.; Concilio, A. Design and integration sensitivity of a morphing trailing edge on a reference airfoil: The effect on high-altitude long-endurance aircraft performance. J. Intell. Mater. Syst. Struct. 2017, 28, 2933–2946. [Google Scholar] [CrossRef] [Green Version]
- Ursache, N.M.; Melin, T.; Isikveren, A.T.; Friswell, M.I. Technology Integration for Active Poly-Morphing Winglets Development. In Smart Materials, Adaptive Structures and Intelligent Systems; ASMEDC: Ellicott City, MD, USA, 2008; pp. 775–782. [Google Scholar] [CrossRef] [Green Version]
- Pätzold, M.; Lutz, T.; Kramer, E.; Wagner, S. Numerical Optimization of Finite Shock Control Bumps. In Proceedings of the 44th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006; American Institute of Aeronautics and Astronautics: Reno, NV, USA, 2006. [Google Scholar] [CrossRef]
- Bruce, P.J.K.; Babinsky, H. Experimental Study into the Flow Physics of Three-Dimensional Shock Control Bumps. J. Aircr. 2012, 49, 1222–1233. [Google Scholar] [CrossRef] [Green Version]
- Qin, N.; Wong, W.S.; Le Moigne, A. Three-dimensional contour bumps for transonic wing drag reduction. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2008, 222, 619–629. [Google Scholar] [CrossRef]
- Bruce, P.J.K.; Colliss, S.P.; Babinsky, H. Three-dimensional shock control bumps: Effects of geometry. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014; American Institute of Aeronautics and Astronautics: National Harbor, MD, USA, 2014. [Google Scholar] [CrossRef]
- Hinchliffe, B.; Qin, N. Using Surface Sensitivity from Mesh Adjoint for Transonic Wing Drag Reduction. AIAA J. 2017, 55, 818–831. [Google Scholar] [CrossRef]
- Deng, F.; Qin, N. Quantitative comparison of 2D and 3D shock control bumps for drag reduction on transonic wings. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 2344–2359. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, P.; Feng, P. Shock control bump parametric research on supercritical airfoil. Sci. China Technol. Sci. 2011, 54, 2935–2944. [Google Scholar] [CrossRef]
- Zhu, M.; Li, Y.; Qin, N.; Huang, Y.; Deng, F.; Wang, Y.; Zhao, N. Shock Control of a Low-Sweep Transonic Laminar Flow Wing. AIAA J. 2019, 57, 2408–2420. [Google Scholar] [CrossRef]
- König, B.; Pätzold, M.; Lutz, T.; Krämer, E.; Rosemann, H.; Richter, K.; Uhlemann, H. Numerical and Experimental Validation of Three-Dimensional Shock Control Bumps. J. Aircr. 2009, 46, 675–682. [Google Scholar] [CrossRef]
- Kirn, J.; Machunze, W.; Weber, M.; Strachauer, F. Non-Discrete Spoiler with an Adaptive Shock Control Bump. In Proceedings of the ICAST2016: 27nd International Conference on Adaptive Structures and Technologies, Lake George, NY, USA, 3–5 October 2016. [Google Scholar]
- Machunze, W.; Kirn, J.; Weber, M. Integral CFRP spoiler with shock bump control. In Proceedings of the ASME 2020 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, SMASIS 2020, Porto, Portugal, 15 September 2020. [Google Scholar]
- Hansen, H.; Kirn, J.; Machunze, W.; Metzner, C.; Weber, M.J. Aircraft Wing with an Adaptive Shock Control Bump. U.S. Patent US10,427,779B2, 1 October 2019. [Google Scholar]
- Hansen, H.; Kirn, J.; Machunze, W.; Metzner, C.; Weber, M.J. Aircraft Wing with Spoiler. Patent EP3,187,413A1, 5 July 2017. [Google Scholar]
- Werner, M. Application of an Adaptive Shock Control Bump for Drag Reduction on a Variable Camber NLF Wing. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018; American Institute of Aeronautics and Astronautics: Kissimmee, FL, USA, 2018. [Google Scholar] [CrossRef]
- Kintscher, M.; Monner, H.P. Structural Concept of an Adaptive Shock Control Bump Spoiler; SAE International: Dallas, TX, USA, 2017. [Google Scholar] [CrossRef]
- Pritschow, G.; Wadehn, W.; Kehl, G. Shape adaptation of fixed wing aircraft by shape memory alloys. In Proceedings of the 7th International Conference on New Actuators, Actuator 2000, Bremen, Germany, 10–12 June 2000; pp. 587–590. [Google Scholar]
- Campanile, L.F.; Carli, V.; Sachau, D. Adaptive Wing Model for Wind Channel Tests. In Proceedings of the RTO A VT Symposium, Braunschweig, Germany, 8–11 May 2000; Available online: https://apps.dtic.mil/sti/pdfs/ADP011131.pdf (accessed on 12 January 2021).
- Wadehn, W.; Sommerer, A.; Lutz, T.; Fokin, D.; Pritschow, G.; Wagner, S. Structural Concepts and Aerodynamic Design of Shock Control Bumps. In Proceedings of the 23rd Congress of International Council of the Aeronautical Sciences, ICAS 2002-P14, Toronto, ON, Canda, 8–13 September 2002; Available online: http://www.icas.org/ICAS_ARCHIVE/ICAS2002/PAPERS/P14.PDF (accessed on 12 January 2021).
- Campanile, L.F.; Keimer, R. A shape-memory actuator for surface geometry control. J. Phys. IV Proc. 2003, 112, 1189–1192. [Google Scholar] [CrossRef]
- Campanile, L.F.; Keimer, R.; Breitbach, E.J. The “Fish-Mouth” Actuator: Design Issues and Test Results. J. Intell. Mater. Syst. Struct. 2004, 15, 711–719. [Google Scholar] [CrossRef]
- Bein, T.; Hanselka, H.; Breitbach, E. The Adaptive Spoiler—Mechanical Aspects of a Local Thickening (Bump) to Control the Transonic Shock. In Proceedings of the 9th International Conference on Adaptive Structure and Technology, Cambridge, MA, USA, 14–16 October 1998. [Google Scholar]
- Bein, T.; Hanselka, H.; Breitbach, E. An adaptive spoiler to control the transonic shock. Smart Mater. Struct. 2000, 9, 141–148. [Google Scholar] [CrossRef]
- Kintscher, M.; Alves de Sousa, N.; Monner, H.P.; Wiedemann, M. Generation of a Shock Control Bump by Pressurized Chambers. In Proceedings of the 26th International Conference on Adaptive Structures and Technologies, Kobe, Japan, 14–16 October 2015. [Google Scholar]
- Alves de Sousa, N.; Kintscher, M.; Suleman, A. Morphing of an adaptive shock control bump using pressurized chambers. J. Intell. Mater. Syst. Struct. 2020. [Google Scholar] [CrossRef]
- Hao, L.; Qiu, J.; Ji, H.; Nie, R. Numerical analysis on shape memory alloy–based adaptive shock control bump. J. Intell. Mater. Syst. Struct. 2018, 29, 3055–3066. [Google Scholar] [CrossRef]
- Zhang, Y.; Tan, H.-J.; Li, J.-F.; Yin, N. Control of Cowl-Shock/Boundary-Layer Interactions by Deformable Shape-Memory Alloy Bump. AIAA J. 2019, 57, 696–705. [Google Scholar] [CrossRef]
- Couldrick, J.; Shankar, K.; Gai, S.; Milthorpe, J. (GSW0058) Structural design of “smart” actuator flaps for control of shock wave/boundary layer interaction. Abstr. ATEM Int. Conf. Adv. Technol. Exp. Mech. Asian Conf. Exp. Mech. 2003, 2003. [Google Scholar] [CrossRef]
- Zhou, L.; Chen, D.; Tao, Y.; Liu, G.; Song, S.; Zhong, S. Passive shock wave/boundary layer control of wing at transonic speeds. Theor. Appl. Mech. Lett. 2017, 7, 325–330. [Google Scholar] [CrossRef]
- Jinks, E.R.; Bruce, P.J.; Santer, M.J. The Use of Actuated Flexible Plates for Adaptive Shock Control Bumps. In Proceedings of the 53rd AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 5–9 January 2015; American Institute of Aeronautics and Astronautics: Kissimmee, FL, USA, 2015. [Google Scholar] [CrossRef] [Green Version]
- Gramola, M.; Bruce, P.J.; Santer, M.J. FSI study of 2D adaptive shock control bumps. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; American Institute of Aeronautics and Astronautics: San Diego, CA, USA, 2019. [Google Scholar] [CrossRef]
- Gramola, M.; Bruce, P.J.K.; Santer, M. Off-design performance of 2D adaptive shock control bumps. J. Fluids Struct. 2020, 93, 102856. [Google Scholar] [CrossRef]
- Shinde, V.; McNamara, J.; Gaitonde, D.; Barnes, C.; Visbal, M. Transitional shock wave boundary layer interaction over a flexible panel. J. Fluids Struct. 2019, 90, 263–285. [Google Scholar] [CrossRef]
- Shinde, V.; McNamara, J.; Gaitonde, D. Control of transitional shock wave boundary layer interaction using structurally constrained surface morphing. Aerosp. Sci. Technol. 2020, 96. [Google Scholar] [CrossRef]
- Jinks, E.R.; Bruce, P.J.; Santer, M.J. Aero-Structural Design Optimization of Adaptive Shock Control Bumps. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; American Institute of Aeronautics and Astronautics: San Diego, CA, USA, 2016. [Google Scholar] [CrossRef] [Green Version]
- Jinks, E.; Bruce, P.; Santer, M. Optimisation of adaptive shock control bumps with structural constraints. Aerosp. Sci. Technol. 2018, 77, 332–343. [Google Scholar] [CrossRef]
- Kota, S.; Hetrick, J.A. Adaptive Compliant Wing and Rotor System. U.S. Patent US 2006/0186269A1, 24 August 2006. [Google Scholar]
- Ganiev, Y.C.; Gordeev, V.P.; Krasilnikov, A.V.; Lagutin, V.I.; Otmennikov, V.N.; Panasenko, A.V. Aerodynamic Drag Reduction by Plasma and Hot-Gas Injection. J. Thermophys. Heat Transf. 2000, 14, 10–17. [Google Scholar] [CrossRef]
- Shang, J.S. Plasma Injection for Hypersonic Blunt-Body Drag Reduction. AIAA J. 2002, 40, 1178–1186. [Google Scholar] [CrossRef]
- Jukes, T.; Choi, K.-S.; Johnson, G.; Scott, S. Turbulent Boundary-Layer Control for Drag Reduction Using Surface Plasma. In Proceedings of the 2nd AIAA Flow Control Conference, Portland, OR, USA, 28 June–1 July 2004; American Institute of Aeronautics and Astronautics: Portland, OR, USA, 2004. [Google Scholar] [CrossRef]
- Shang, J.S.; Kimmel, R.L.; Menart, J.; Surzhikov, S.T. Hypersonic Flow Control Using Surface Plasma Actuator. J. Propuls. Power 2008, 24, 923–934. [Google Scholar] [CrossRef]
- Corke, T.C.; Enloe, C.L.; Wilkinson, S.P. Dielectric Barrier Discharge Plasma Actuators for Flow Control. Annu. Rev. Fluid Mech. 2010, 42, 505–529. [Google Scholar] [CrossRef]
- Esfahani, A.G.; Singhal, A.; Clifford, C.J.; Samimy, M. Flow Separation Control over a Boeing Vertol VR-7 using NS-DBD Plasma Actuators. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; American Institute of Aeronautics and Astronautics: San Diego, CA, USA, 2016. [Google Scholar] [CrossRef]
- Samimy, M.; Webb, N.; Esfahani, A. Reinventing the wheel: Excitation of flow instabilities for active flow control using plasma actuators. J. Phys. Appl. Phys. 2019, 52, 354002. [Google Scholar] [CrossRef]
- Chang, M.; Macheret, S.; Vadyak, J. Mitigating Transonic Shock Wave with Plasma Heating Elements. Patent EP2532586A2, 12 December 2012. [Google Scholar]
- Chang, M.; Macheret, S.; Vadyak, J. Mitigating Transonic Shock Wave with plasma Heating Elements. U.S. Patent US2019/0241254A1, 8 August 2019. [Google Scholar]
- Lin, M.; Xu, H.; Liang, H.; Sun, Q. Numerical Simulation of Plasma Aerodynamic Actuation for Airfoil Transonic Drag Reduction. J. Air Force Eng. Univ. 2012, 13. [Google Scholar]
- Kalarikovilagam Srinivasan, G.; Bertram, O. Preliminary Design and System Considerations for an Active Hybrid Laminar Flow Control System. Aerospace 2019, 6, 109. [Google Scholar] [CrossRef] [Green Version]
- Pohya, A. Selected Current Challenges in the Development of Hybrid Laminar Flow Control on Transport Aircraft. In Proceedings of the Deutscher Luft- und Raumfahrtkongress (DLRK) 2019, Darmstadt, Deutschland, 30 September–2 October 2019. [Google Scholar] [CrossRef]
- Young, T.M.; Humphreys, B.; Fielding, J.P. Investigation of hybrid laminar flow control (HLFC) surfaces. Aircr. Des. 2001, 4, 127–146. [Google Scholar] [CrossRef]
- Hartl, D.J.; Mabe, J.H.; Benafan, O.; Coda, A.; Conduit, B.; Padan, R.; Doren, B.V. Standardization of shape memory alloy test methods toward certification of aerospace applications. Smart Mater. Struct. 2015, 24, 082001. [Google Scholar] [CrossRef] [Green Version]
- Kainuma, R. Recent Progress in Shape Memory Alloys. Mater. Trans. 2018, 59, 327–331. [Google Scholar] [CrossRef] [Green Version]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Concepts | Advantages | Challenges |
|---|---|---|---|
| 1 | Perforated skin/ porosity |
|
|
| 2 | Preformed spoiler 1 |
|
|
| 3 | SMA 3 wire bundle actuators |
|
|
| 4 | SMA plate |
|
|
| 5 | Pressure-actuated concepts |
|
|
| 6 | Thin flexible plate deformation by airflow pressure differences |
|
|
| 7 | Compliant structures |
|
|
| 8 | Shock mitigation with plasma |
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Künnecke, S.C.; Vasista, S.; Riemenschneider, J.; Keimer, R.; Kintscher, M. Review of Adaptive Shock Control Systems. Appl. Sci. 2021, 11, 817. https://doi.org/10.3390/app11020817
Künnecke SC, Vasista S, Riemenschneider J, Keimer R, Kintscher M. Review of Adaptive Shock Control Systems. Applied Sciences. 2021; 11(2):817. https://doi.org/10.3390/app11020817
Chicago/Turabian StyleKünnecke, Sven Christian, Srinivas Vasista, Johannes Riemenschneider, Ralf Keimer, and Markus Kintscher. 2021. "Review of Adaptive Shock Control Systems" Applied Sciences 11, no. 2: 817. https://doi.org/10.3390/app11020817