A Satellite Incipient Fault Detection Method Based on Local Optimum Projection Vector and Kullback-Leibler Divergence



Abstract
:1. Introduction
- This paper puts forward the argument that the PVs obtained by PCA are not necessarily the optimum PV for using KL divergence to detect an incipient fault.
- The problem of finding the optimum PV to detect the incipient fault is modeled as an optimization problem, and the KL divergence is used to detect the incipient fault on the LOPVs.
- The application of the incipient fault detection method based on PCA and KL divergence is extended to the satellites. The effectiveness of the proposed method is proven in a real satellite fault.
2. Preliminary
2.1. PCA
2.2. KL Divergence
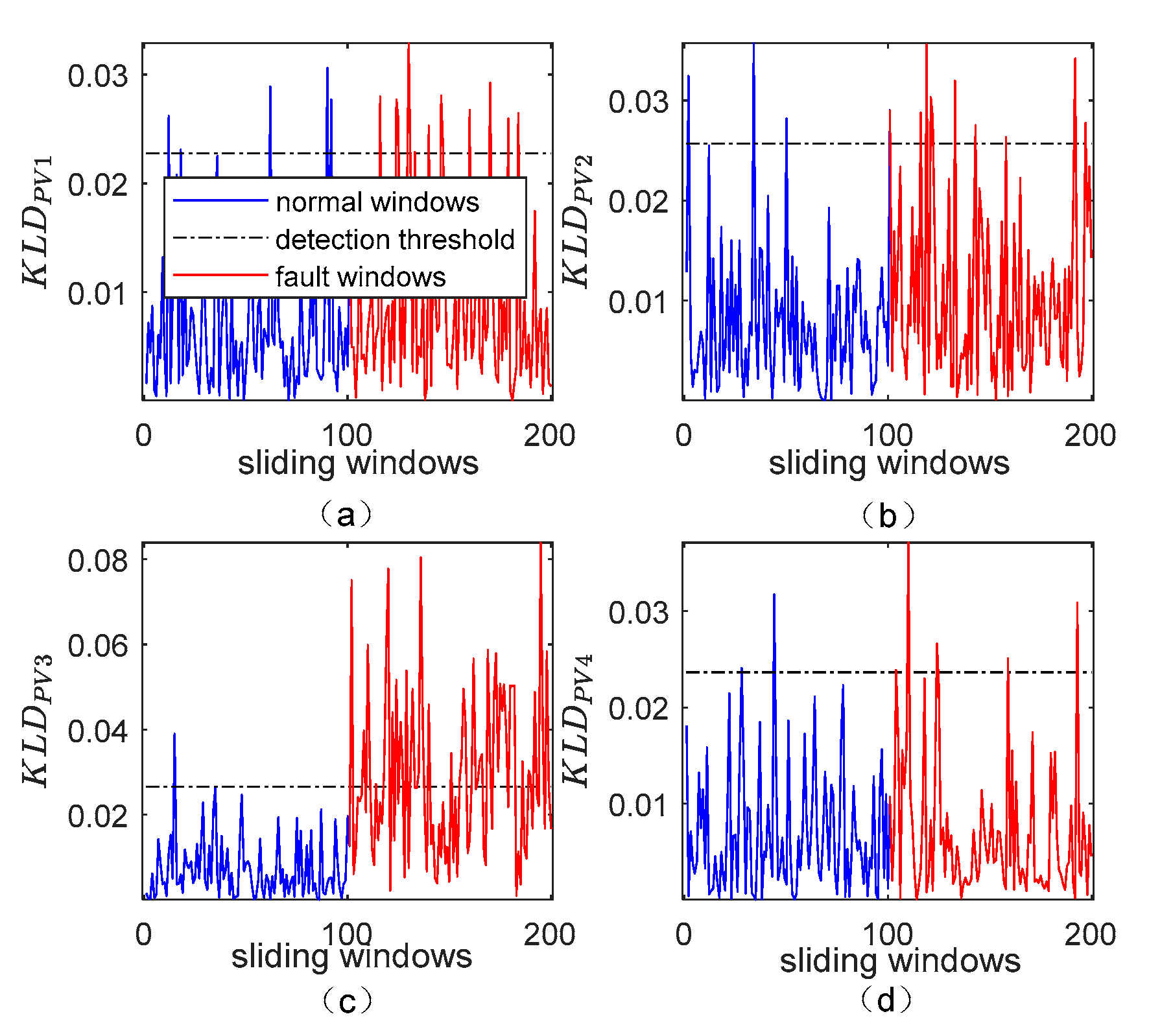
- The standardized normal data are projected on each PV and the reference PDF of the normal data is obtained after projection on as and the corresponding detection threshold is , .
- Each column of the on-line data matrix is standardized with .
- The standardized on-line data are projected on each PV to obtain the PDF of the on-line data.
- Equation (6) is used to calculate the KL divergence between the PDF and the reference PDF for each PV .
- Whether the is greater than the corresponding detection threshold is determined for each PV . It is considered to be faulty when at least one of the units of exceeds the corresponding detection threshold.
3. Incipient Fault Detection Method Based on LOPV and KL Divergence
3.1. Optimum PV for Incipient Fault Detection
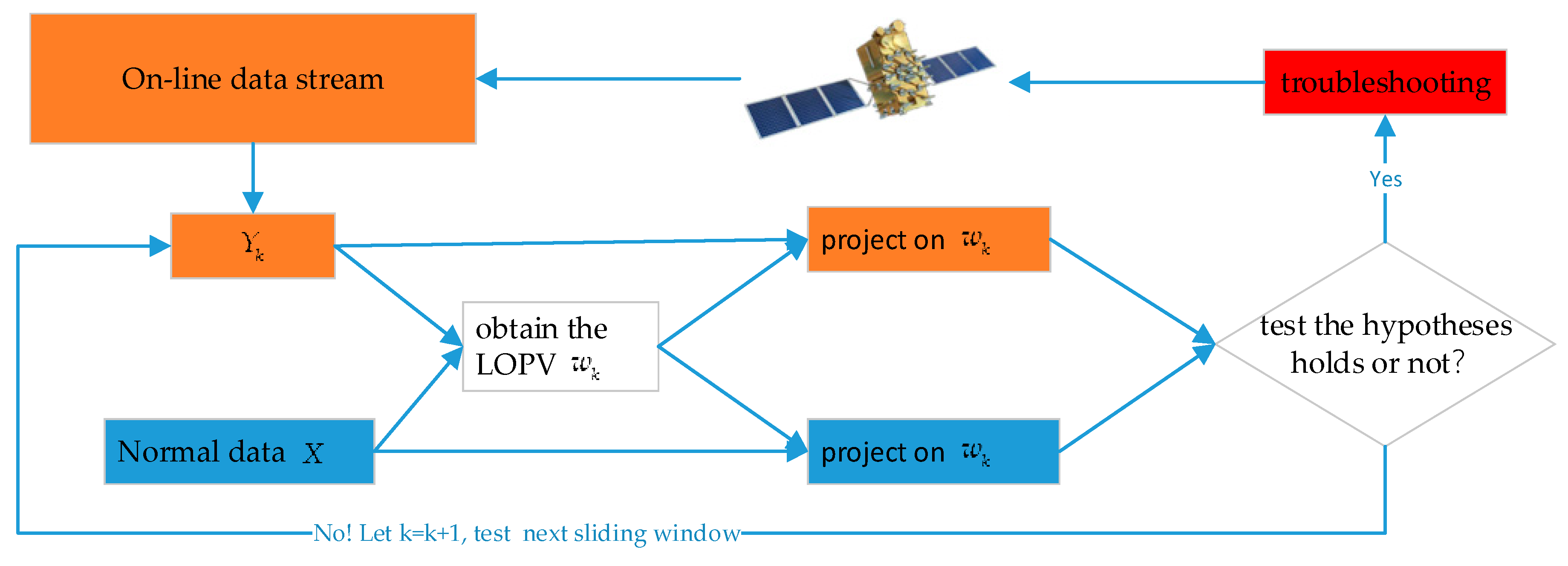
3.2. Detecting Incipient Faults Using LOPVs and Dynamic Thresholds
- Let , we assume that is faulty. The method is used as described in Section 3.1 to find the local optimum PV for fault detection between the on-line data and the historical normal data .
- Let the projection of and on the local optimum PV be and .
- The KL divergence of and is calculated.
- The threshold of the local optimum PV is set according to the given significance level .
- If , then assuming that is faulty is correct. Otherwise, is normal. Let , the next sliding window will be tested from steps 1 to 5.
3.3. The Complete Incipient Fault Detection Process
|
4. Results and Analysis
4.1. Numerical Example
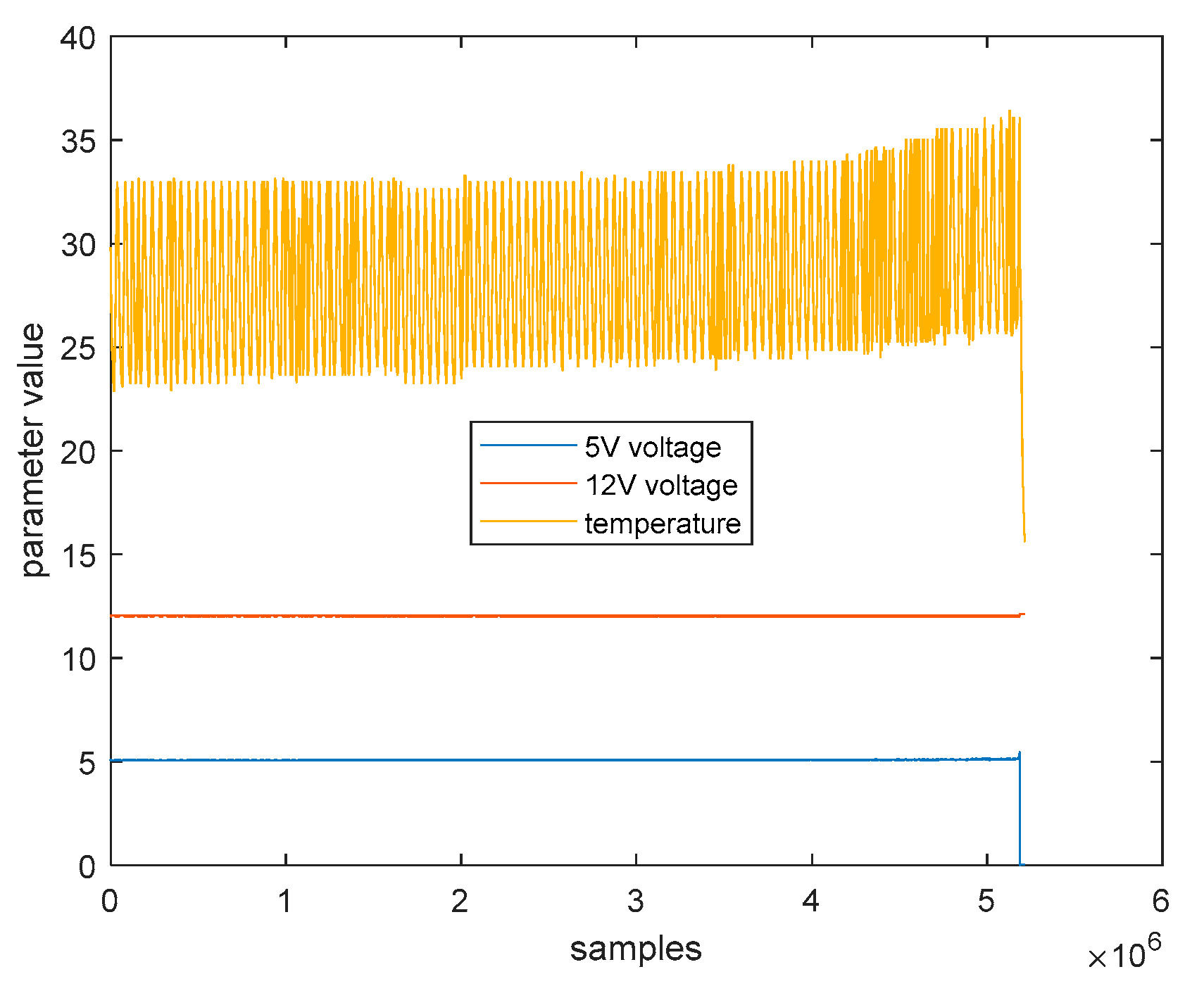
4.2. Satellite Spread-Spectrum Transponder Fault Case
4.2.1. The Phenomena and Causes of the Fault
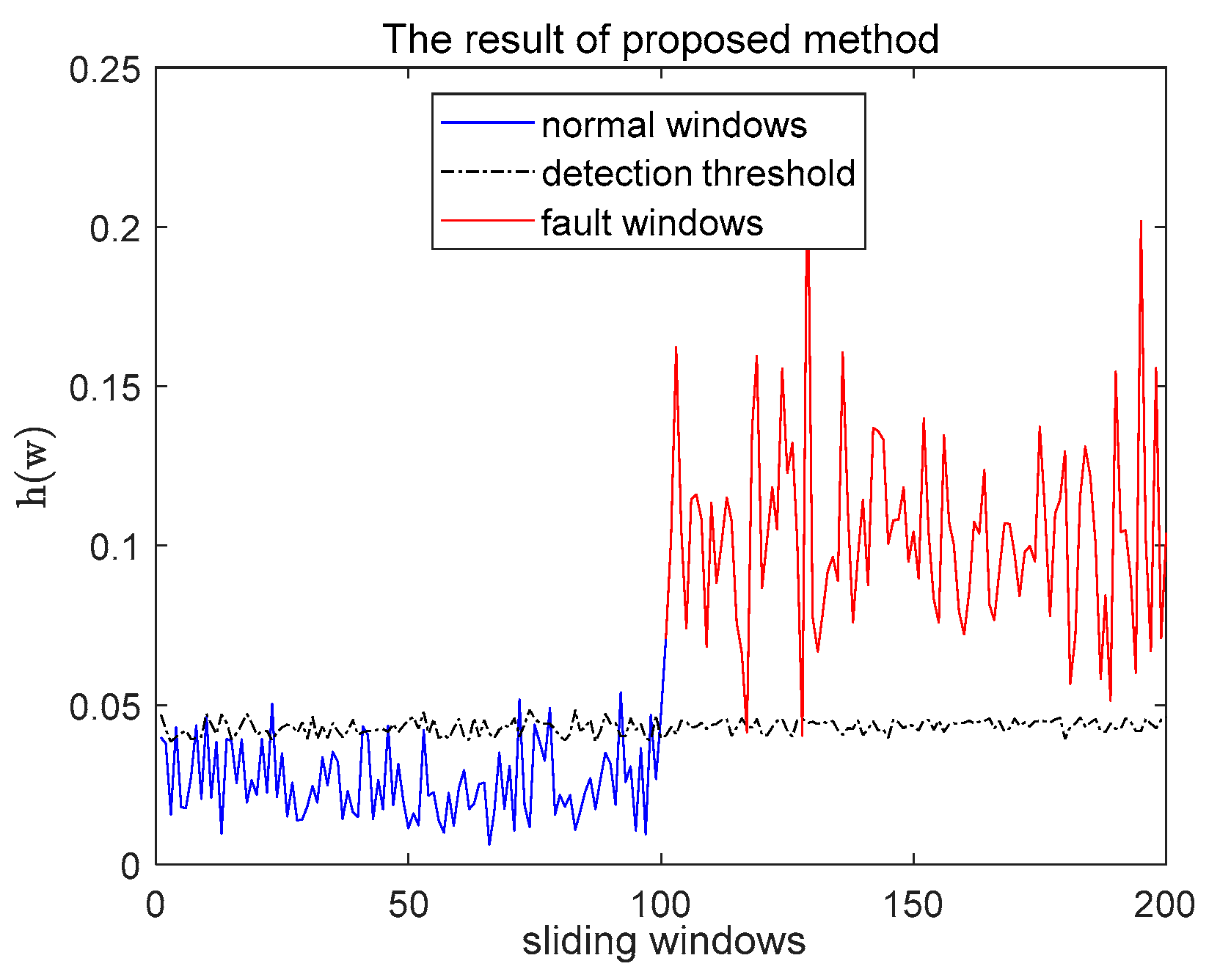
4.2.2. Results and Comparison of Detecting the Fault
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FAR | false alarm rate |
| FDR | fault detection rate |
| GPR | Gaussian Process Regression |
| IMS | Inductive Monitoring System |
| KL | Kullback–Leibler |
| KLD | KL divergence |
| LOPV | local optimum PV |
| LSTM | Long Short-Term Memory |
| OS-SVM | One Class Support Vector Machine |
| PCA | principal component analysis |
| probability density function | |
| PV | projection vector |
Mathematical Notations
| Symbol | Size | Description |
| Normal data matrix. | ||
| Number of normal samples | ||
| Number of variables of a system | ||
| Normal data matrix after standardized. | ||
| Covariance matrix of | ||
| Eigenvector matrix of , each column of the matrix V is a projection vector | ||
| Number of on-line samples | ||
| On-line data matrix. | ||
| jth column of the matrix V | ||
| Detection threshold of the PV | ||
| Significance level | ||
| Mean vector of the joint Gaussian distribution that the normal data obeyed | ||
| Covariance matrix of the joint Gaussian distribution that the normal data obeyed | ||
| Optimum PV | ||
| Mean vector of the joint Gaussian distribution that the on-line data obeyed | ||
| Covariance matrix of the joint Gaussian distribution that the on-line data obeyed | ||
| Mean deviation vector of and | ||
| KL divergence of the projections of the normal data matrix and the on-line data matrix on | ||
| Vector of the KL divergences of the projections between all submatrices and the normal data matrix on | ||
| Relative KL divergence of the projection of the normal data matrix and the on-line data matrix on | ||
| Initial iteration vector | ||
| On-line data extracted by the kth sliding window. | ||
| Local optimum PV of the on-line data and the normal data | ||
| Detection threshold of the local optimal PV |
References
- Jiang, H.; Zhang, K.; Wang, J.; Wang, X.; Huang, P. Anomaly Detection and Identification in Satellite Telemetry Data Based on Pseudo-Period. Appl. Sci. 2019, 10, 103. [Google Scholar] [CrossRef] [Green Version]
- Ezhilarasu, C.M.; Skaf, Z.; Jennions, I.K. The application of reasoning to aerospace Integrated Vehicle Health Management (IVHM): Challenges and opportunities. Prog. Aerosp. Sci. 2019, 105, 60–73. [Google Scholar] [CrossRef]
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly Detection: A Survey. ACM Comput. Surv. 2009, 41, 1–58. [Google Scholar] [CrossRef]
- Tipaldi, M.; Bruenjes, B. Survey on Fault Detection, Isolation, and Recovery Strategies in the Space Domain. J. Aerosp. Inf. Syst. 2015, 12, 235–256. [Google Scholar] [CrossRef]
- Youssef, A.; Delpha, C.; Diallo, D. Enhancement of incipient fault detection and estimation using the multivariate Kullback-Leibler Divergence. In Proceedings of the 2016 24th European Signal Processing Conference (EUSIPCO), Budapest, Hungary, 28 August–2 September 2016; pp. 1408–1412. [Google Scholar]
- Contreras-Reyes, J.E.; Arellano-Valle, R.B. Kullback-Leibler Divergence Measure for Multivariate Skew-Normal Distributions. Entropy 2012, 14, 1606–1626. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Jiang, B.; Lu, N.; Mao, Z. Deep PCA Based Real-Time Incipient Fault Detection and Diagnosis Methodology for Electrical Drive in High-Speed Trains. IEEE Trans. Veh. Technol. 2018, 67, 4819–4830. [Google Scholar] [CrossRef]
- Narasimhan, S.; Brownston, L. HyDE—A General Framework for Stochastic and Hybrid Model-based Diagnosis. Proc. DX 2007, 7, 162–169. [Google Scholar]
- Deb, S.; Pattipati, K.R.; Shrestha, R. QSI’s Integrated Diagnostics Toolset. In Proceedings of the 1997 IEEE Autotestcon Proceedings AUTOTESTCON’97, Anaheim, CA, USA, 22–25 September 1997; pp. 408–421. [Google Scholar]
- Kurien, J.; R-Moreno, M.D. Costs and Benefits of Model-based Diagnosis. In Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; pp. 1–14. [Google Scholar]
- Luo, B.; Wang, H.; Liu, H.; Li, B.; Peng, F. Early Fault Detection of Machine Tools Based on Deep Learning and Dynamic Identification. IEEE Trans. Ind. Electron. 2019, 66, 509–518. [Google Scholar] [CrossRef]
- Duncan Imbassahy, D.W.; Costa Marques, H.; Conceição Rocha, G.; Martinetti, A. Empowering Predictive Maintenance: A Hybrid Method to Diagnose Abnormal Situations. Appl. Sci. 2020, 10, 6929. [Google Scholar] [CrossRef]
- Pang, J.; Liu, D.; Peng, Y.; Peng, X. Optimize the Coverage Probability of Prediction Interval for Anomaly Detection of Sensor-Based Monitoring Series. Sensors 2018, 18, 967. [Google Scholar] [CrossRef] [Green Version]
- David, I.; Rodney, M.; Mark, S.; Spirkovska, L. General Purpose Data-Driven System Monitoring for Space Operations—AIAA Infotech@Aerospace Conference (AIAA). In Proceedings of the Aiaa Infotech, Seattle, WA, USA, 6–9 April 2009; pp. 26–44. [Google Scholar]
- Schwabacher, M.; Oza, N.; Matthews, B. Unsupervised Anomaly Detection for Liquid-Fueled Rocket Propulsion Health Monitoring. J. Aeros. Comp. Inf. Com. 2009, 6, 464–482. [Google Scholar] [CrossRef] [Green Version]
- Pang, J.; Liu, D.; Peng, Y.; Peng, X. Anomaly detection based on uncertainty fusion for univariate monitoring series. Measurement 2017, 95, 280–292. [Google Scholar] [CrossRef]
- Hundman, K.; Constantinou, V.; Laporte, C.; Colwell, I.; Soderstrom, T. Detecting Spacecraft Anomalies Using LSTMs and Nonparametric Dynamic Thresholding. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, 19–23 August 2018; pp. 387–395. [Google Scholar]
- Tariq, S.; Lee, S.; Shin, Y.; Lee, M.S.; Jung, O.; Chung, D.; Woo, S.S. Detecting Anomalies in Space using Multivariate Convolutional LSTM with Mixtures of Probabilistic PCA. In Proceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Anchorage, AK, USA, 4–8 August 2019; pp. 2123–2133. [Google Scholar]
- Yin, S.; Ding, S.X.; Xie, X.; Luo, H. A Review on Basic Data-Driven Approaches for Industrial Process Monitoring. IEEE Trans. Ind. Electron. 2014, 61, 6418–6428. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Zhang, P.; Zhu, G. Fault Data Detection of Traffic Detector Based on Wavelet Packet in the Residual Subspace Associated with PCA. Appl. Sci. 2019, 9, 3491. [Google Scholar] [CrossRef] [Green Version]
- Harmouche, J.; Delpha, C.; Diallo, D. Incipient fault detection and diagnosis based on Kullback-Leibler divergence using Principal Component Analysis: Part I. Signal Process. 2014, 94, 278–287. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Lu, N. An improved incipient fault detection method based on Kullback-Leibler divergence. ISA Trans. 2018, 79, 127–136. [Google Scholar] [CrossRef]
- Youssef, A.; Delpha, C.; Diallo, D. An optimal fault detection threshold for early detection using Kullback-Leibler Divergence for unknown distribution data. Signal Process. 2016, 120, 266–279. [Google Scholar] [CrossRef]
- Song, B.; Zhou, X.; Tan, S.; Shi, H.; Zhao, B.; Wang, M. Process Monitoring via Key Principal Components and Local Information Based Weights. IEEE Access 2019, 7, 15357–15366. [Google Scholar] [CrossRef]
- Luo, L.; Bao, S.; Mao, J. Adaptive Selection of Latent Variables for Process Monitoring. Ind. Eng. Chem. Res. 2019, 58, 9075–9086. [Google Scholar] [CrossRef]
- Jolliffe, I.T. Principal Component Analysis, 2nd ed.; Springer: New York, NY, USA, 2002. [Google Scholar]
- Cherry, G.A.; Qin, S.J. Multiblock Principal Component Analysis Based on a Combined Index for Semiconductor Fault Detection and Diagnosis. IEEE Trans. Semicond. Manuf. 2006, 19, 159–172. [Google Scholar] [CrossRef]
- Doersch, C. Tutorial on Variational Autoencoders. arXiv 2016, arXiv:1606.05908. [Google Scholar]
- Huang, Y.; Zhang, Y.; Chambers, J.A. A Novel Kullback-Leibler Divergence Minimization-Based Adaptive Student’s t-Filter. IEEE Trans. Signal Process. 2019, 67, 5417–5432. [Google Scholar] [CrossRef]
- Kullback, S.; Leibler, R.A. On information and sufficiency. Ann. Math. Stat. Mar. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Byrd, R.H.; Gilbert, J.C.; Nocedal, J. A trust region method based on interior point techniques for nonlinear programming. Math. Program. 2000, 89, 149–185. [Google Scholar] [CrossRef] [Green Version]
- Coleman, T.F.; Li, Y. On the convergence of interior-reflective Newton methods for nonlinear minimization subject to bounds. Math. Program. 1994, 67, 189–224. [Google Scholar] [CrossRef]
- Nassar, B.; Hussein, W.; Mokhtar, M. Space Telemetry Anomaly Detection Based on Statistical PCA Algorithm. In Proceedings of the ICSSC 2015: International Conference on Satellite and Space Communications, Paris, France, 27–28 August 2015; pp. 637–645. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Faults | PCA + SPE | PCA + KLD1 | PCA + KLD2 | Proposed Method | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| FDR | FAR | FDR | FAR | FDR | FAR | FDR | FAR | FDR | FAR | |
| 1.09% | 1.01% | 1.20% | 1.01% | 79.63% | 4.87% | 98.04% | 9.50% | 98.11% | 8.10% | |
| 1.45% | 0.98% | 2.13% | 1.02% | 13.83% | 4.63% | 62.92% | 9.01% | 84.77% | 7.48% | |
| 1.04% | 0.99% | 1.02% | 1.01% | 4.38% | 3.70% | 35.17% | 9.20% | 98.33% | 8.05% | |
| Average value | 1.19% | 1.00% | 1.45% | 1.01% | 32.61% | 4.73% | 65.38% | 9.24% | 93.74% | 7.88% |
| Methods | PCA + KLD1 | PCA + KLD2 | Proposed Method | ||||
|---|---|---|---|---|---|---|---|
| Significance Level | 0.05 | 0.025 | 0.01 | 0.05 | 0.025 | 0.01 | 0.01 |
| FDR | 76.84% | 84.21% | 92.63% | 76.84% | 84.21% | 92.63% | 92.63% |
| FAR | 0% | 3.13% | 23.44% | 0% | 3.13% | 23.44% | 0% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Yang, Q.; Li, G.; Leng, J.; Wang, L. A Satellite Incipient Fault Detection Method Based on Local Optimum Projection Vector and Kullback-Leibler Divergence. Appl. Sci. 2021, 11, 797. https://doi.org/10.3390/app11020797
Zhang G, Yang Q, Li G, Leng J, Wang L. A Satellite Incipient Fault Detection Method Based on Local Optimum Projection Vector and Kullback-Leibler Divergence. Applied Sciences. 2021; 11(2):797. https://doi.org/10.3390/app11020797
Chicago/Turabian StyleZhang, Ge, Qiong Yang, Guotong Li, Jiaxing Leng, and Long Wang. 2021. "A Satellite Incipient Fault Detection Method Based on Local Optimum Projection Vector and Kullback-Leibler Divergence" Applied Sciences 11, no. 2: 797. https://doi.org/10.3390/app11020797