1. Introduction
The monitoring of traffic-induced load effects is essential to maintain the safety of the transportation infrastructure. The highway system is a significant part of the national investment, and it requires adequate maintenance. The condition of roads and bridges is important for responding to transportation and economic growth. Therefore, the knowledge of traffic volume and traffic-induced load effects has to be continuously monitored and evaluated.
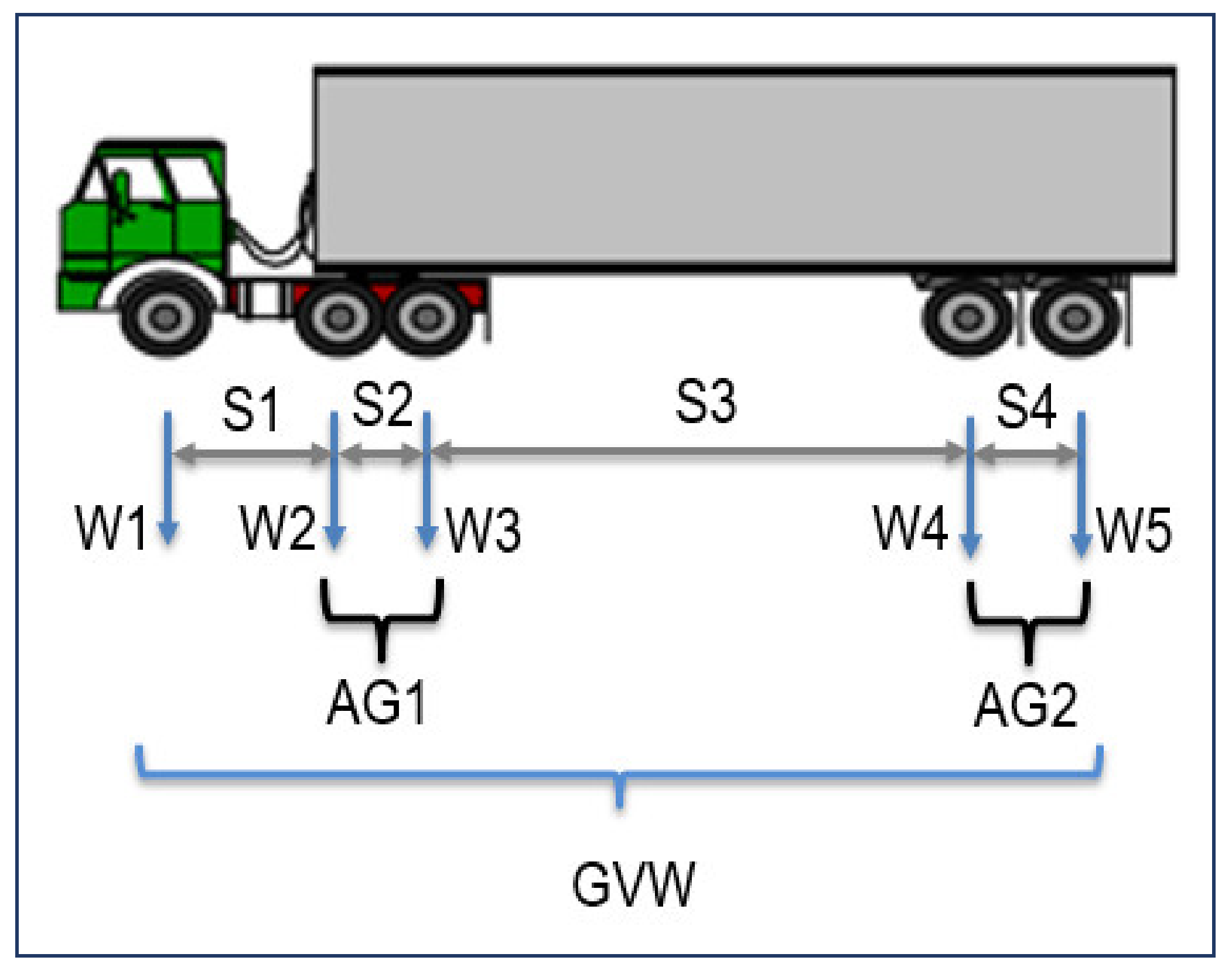
Truck traffic is one of the critical factors influencing transportation safety and efficiency. It is related to a number of traffic accidents, maintenance scheduling, traffic flow interruption, risk control, and management. The number of accidents involving trucks may be two to four times larger than accidents with passenger cars. Traffic weight measurement is required for selecting the design and evaluation loads, as they are needed to design new structures and evaluate existing bridges. Knowledge of the actual live load can serve as a basis for calibration of the live load factors to assure the minimum safety reserve. Development of the live load model requires the measurement of the traffic, number and weight of vehicles, and load distribution on axles. In the infrastructure evaluation, truck assessment is essential since they cause most of the damage to pavements and bridges. The truck is a vehicle class 5 and above based on the Federal Highway Administration classification system, which includes two to seven or more axle single and multi-trailer vehicles.
The weight measurements can be conducted by static scales, where the measured vehicle has to stop to be weighed; this approach has been used to collect traffic weight data for 40 years. In 1977 in Ontario (Canada), portable scales were used to obtain data that were used in the development of the current AASHTO LRFD for bridge design. However, the static weighing methods are local and selective, and they could measure only a small fraction of the highway traffic. At present, the vehicle weight of vehicles can be obtained using weigh-in-motion measurements (WIM). WIM measurements allow for a continuous recording of vehicles passing a measurement site. The WIM systems can collect traffic volume, vehicle configuration, load distribution on axles, etc. It is a powerful tool to collect a massive traffic database. Data is recorded for every vehicle, including a detailed description of vehicle configuration, vehicle class, measurement date and time, occupied lane, direction, and moving speed, as well as individual axle weights and axle spacings.
To accurately assess the traffic-induced load effects, the data quality has to be verified. There are uncertainties involved in the measurement process that must be considered while dealing with millions of vehicle records. Several factors can affect the accuracy of the weigh-in-motion measurements, such as pavement roughness (causing bouncing axle movement or dynamic impact), temperature effects, multiple presence, incorrect vehicle position, etc. Assessment of live load effect plays a key role in designing and evaluating roads and bridges to assure the safety of the infrastructure. Therefore, it is important to adequately assess the load effects to make sure they are not underestimated or overestimated. The underestimation can cause premature damage to bridges and roads, and overestimation can result in a significant cost increase.
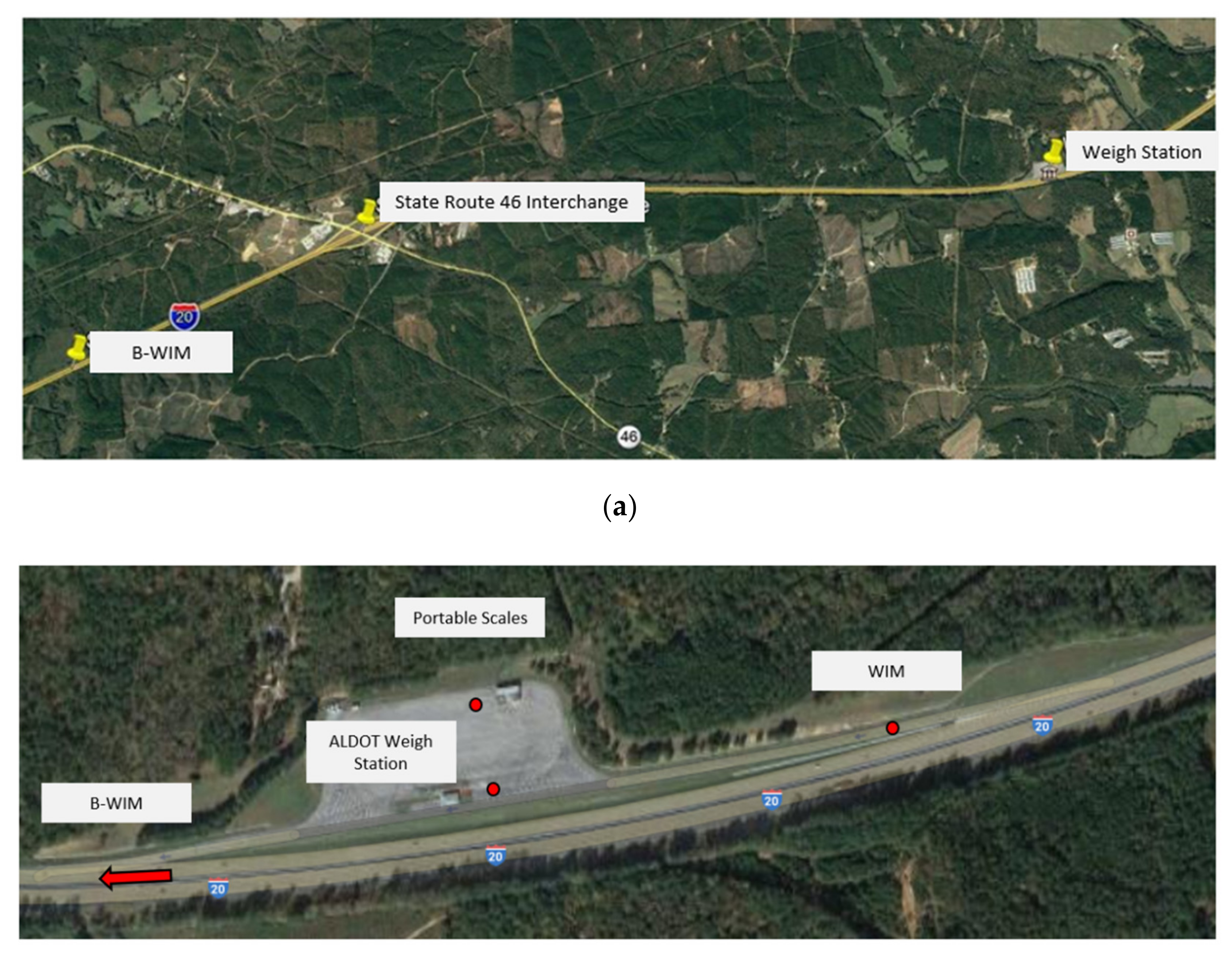
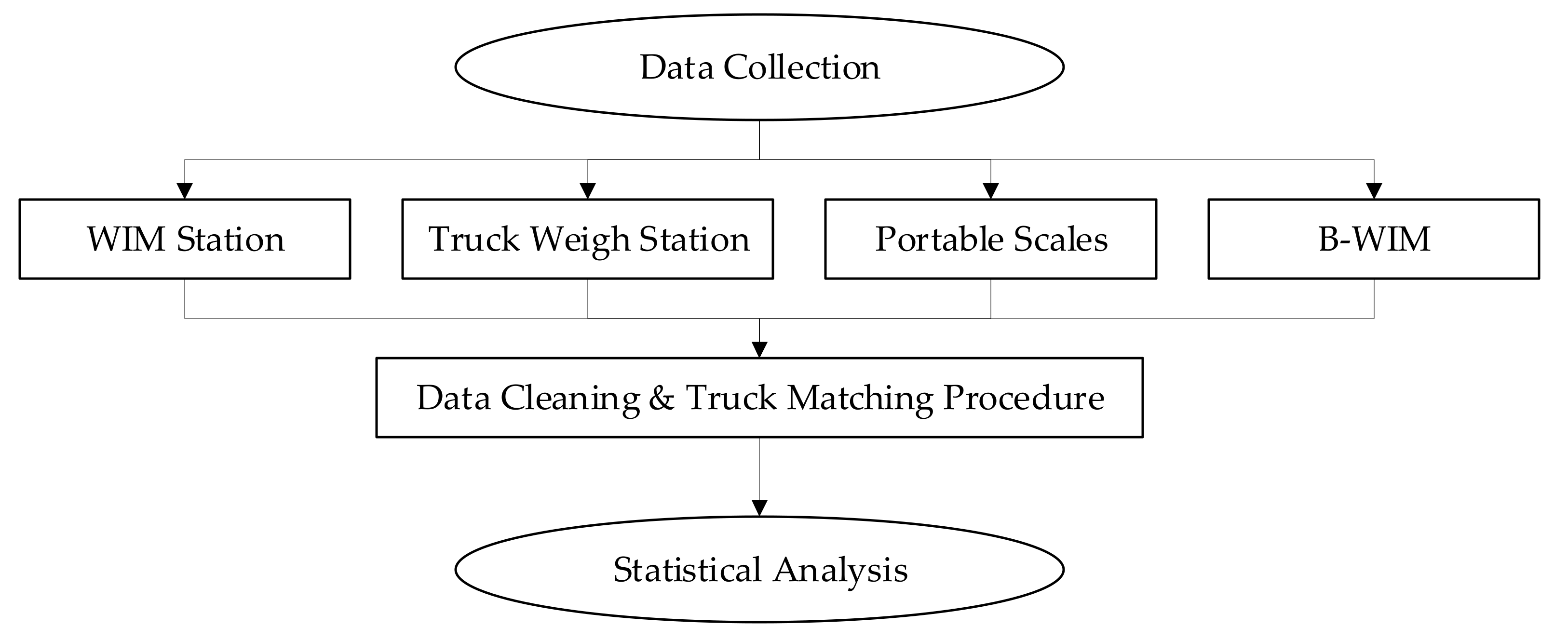
In this study, weight measurement accuracy was considered for four weighing systems: portable scales, truck weigh station, WIM, and bridge-WIM (B-WIM). The objective of this study was to assess the accuracy of the static and dynamic weighing systems. About 150 trucks were measured using static and dynamic weighing systems, and the results were compared to assess the accuracy. This study’s focus was on a comparison of the accuracy of the in-motion measurement and static scales.
Static scales can measure only non-moving vehicles or vehicles moving at a very low speed. Static scales are considered an accurate weighing method and are used as a reference point while testing and calibrating other weighing systems. The portable scale weighing method is reliable, but the process is time-consuming. Each axle weight has to be measured separately, one after another. It requires an operator (typically a qualified police officer) and a driver to move the truck after measuring each axle. The measured truck has to be parked on a flat surface (no slope) and can be an obstruction to the traffic. The portable scale can be moved from place to place because it is easy to setup.
Trucks can also be measured at truck weigh stations. Each weigh station consists of built-in static scales that can weigh standing or very slowly moving vehicles. Truck weigh stations are built off the road, typically on major highways. All the trucks must exit the road and go through the scales monitored by the police operator. However, truck weigh stations often do not capture the heaviest traffic. As the location of these stations is known, so the drivers of illegally overloaded vehicles can take alternative routes.
In pavement-WIM stations are another measurement system. The WIM sites measure vehicle attributes in motion, and data is recorded continuously. In this case, sensors are built-in the pavement, and they take measurements of axle or wheel weights, axle spacings, etc. The WIM stations have been collecting data for over 20 years resulting in millions of records for each station. The WIM systems can collect traffic volume and a wide spectrum of load parameters; each record collected by the WIM system includes the date, time, occupied lane and movement direction, and the vehicle data (vehicle class, number of axles, axle weights, wheel loads, axle spacings).
The weigh-in-motion technologies are available for permanent or temporary traffic data collection classified in the US by ASTM E1318-09 [
1] as WIM from Type I to Type IV, depending on the performance requirements of the WIM system. These systems were designed for long-term traffic monitoring. According to ASTM, the calibrations of weighing systems are performed using test trucks. The WIM systems can be classified as low speed (LS-WIM) or high speed (HS-WIM). LS-WIM systems are more accurate than the HS-WIM, but they require measurements with the vehicle speed only up to 15 km/h, which is not feasible on highways. The LS-WIM systems are equipped with strip and bar sensors, scales, and plates, embedded in a pavement structure.
The WIM scales can be divided into the following groups: load cell scales, bending plates, capacitive mats, and hydraulic plates [
2]. Several types of WIM sensors vary by function (weighing sensors or axle detecting sensors), accuracy, durability, width (plate or strip), price, and requirements for pavement surface. There are three types of piezoelectric WIM sensors: piezoceramic, piezopolymer, and piezoquartz. The first two types are temperature-dependent and mostly used for vehicle count and classification. Piezoquartz WIM sensors are extensively used in frequent freeze-and-thaw cycle regions because of their low sensitivity to temperature variations [
3]. The piezoelectric sensor function is based on the difference in voltage due to the applied force. The calibration procedure verifies the force-voltage relationship. However, this type of system is only accurate in dynamic load, while for static or slow-motion speed measurements can produce a substantial error. Load cell-based WIM systems utilize a similar mechanism as bending plates. The weight sensor is usually a strain-gauge type, which converts the applied force into a proportional electrical signal. The load cell WIM systems are commonly used in conjunction with the inductance loops to eliminate incorrect records and activate the principal system [
4].
Virtual weigh-in-motion stations are an additional type of WIM. They utilize practically the same WIM scale system along with the digital cameras and software to process the visual information in real-time. This system can recognize the characters on vehicle license plates and analyze them, along with the gross vehicle weight (GVW), axle weight, and vehicle class obtained from the traditional sensors.
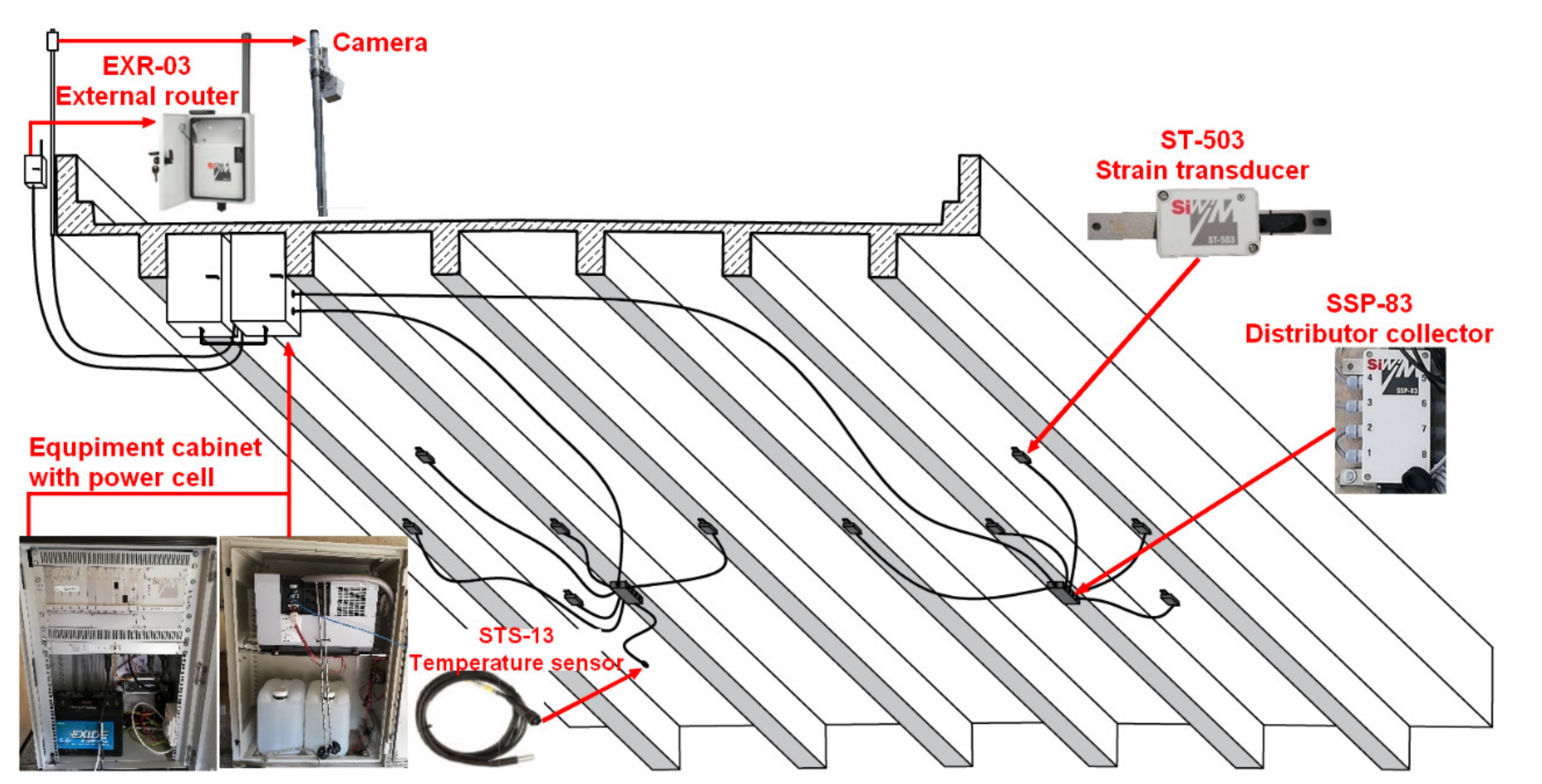
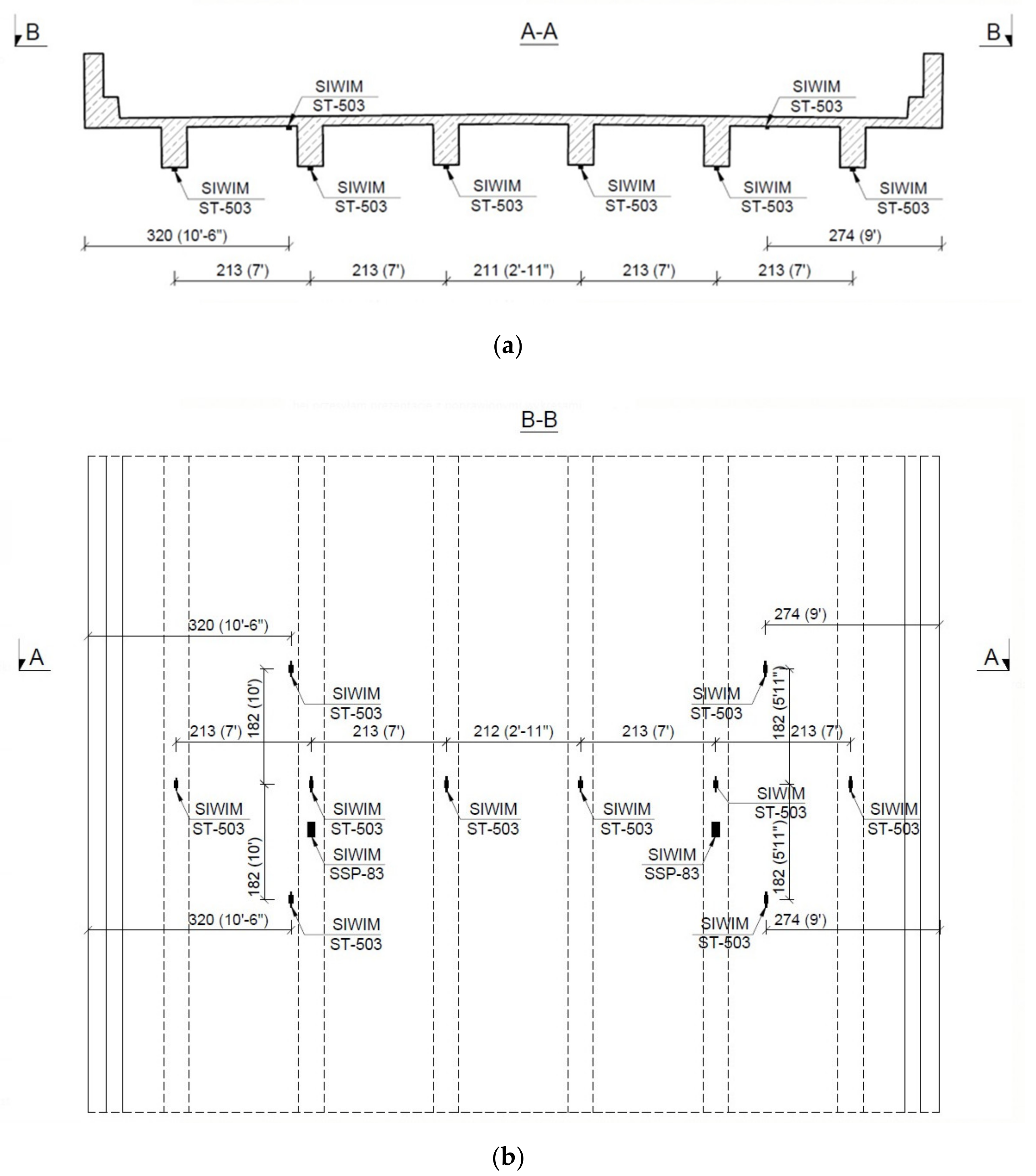
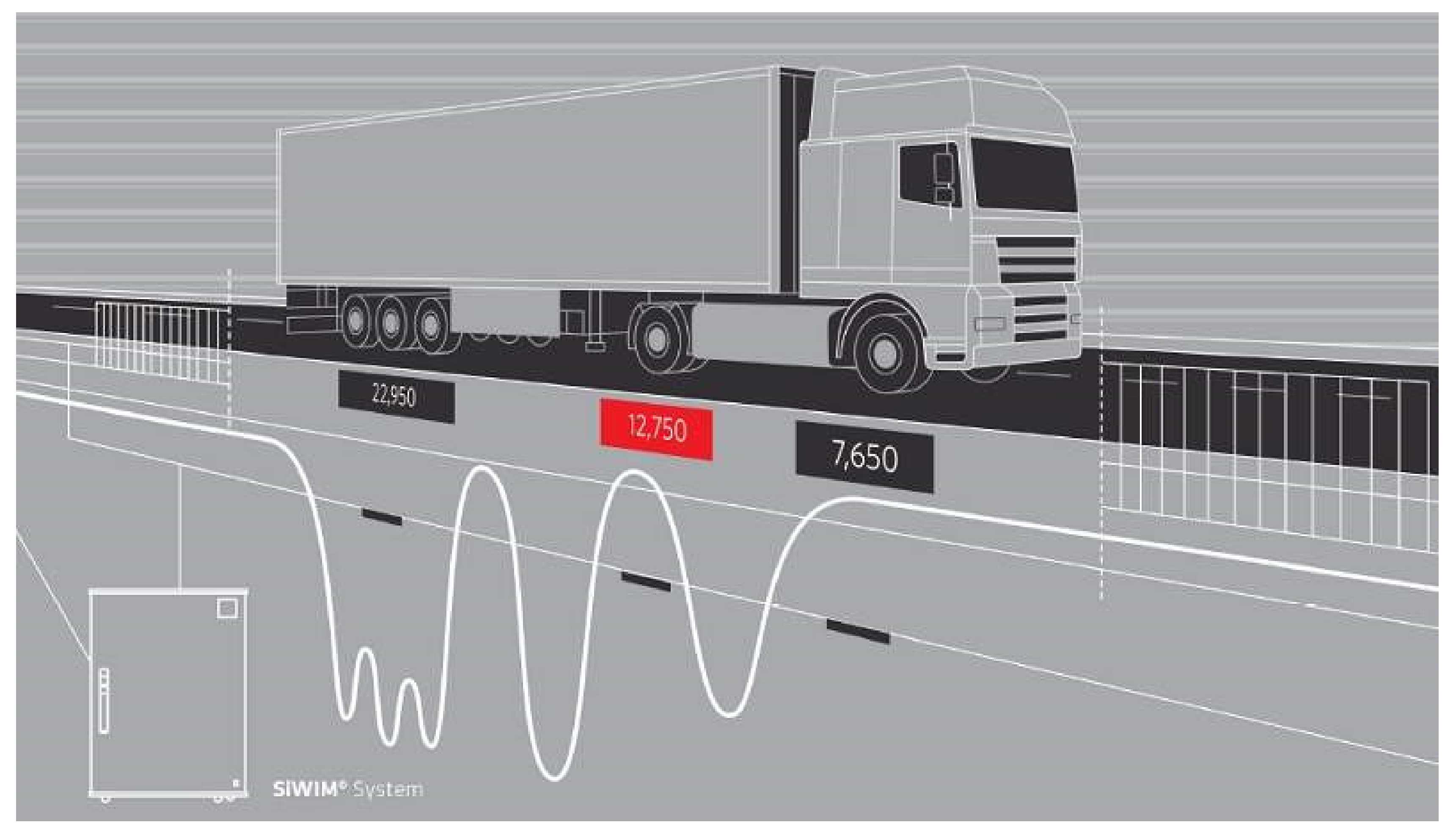
The bridge weigh-in-motion system (B-WIM) is another measurement technique based on instrumenting a bridge and treating it as a large scale that measures vehicles’ attributes. Typically, sensors measure strain in structural components, and dedicated software calculates the axle weights and axle spacings using influence lines/surfaces and calibration factors. B-WIM system is used as a weighing scale to monitor the axle weights of the vehicles passing through the bridge. The initial work relating to the B-WIM system was carried out in the US. In 1979 Moses [
5] published an article with a methodology based on bridge strain history analysis to estimate vehicle axle weight. In Australia, Peters [
6] developed and proposed the AXWAY system to determine vehicle axle load and GVW. In Europe, research in the field of WIM techniques started in the 1990s under the COST 323 program and later the WAVE (Weighing-in-motion of Axles and Vehicles for Europe) [
7] project, which supported the B-WIM research development [
8]. Those studies were used to create a commercially available B-WIM system. Nowadays, the system is widely used in Europe [
1,
9]. B-WIM systems are non-invasive and non-destructive techniques for traffic measurement that are based on monitoring strains in the bridge superstructure induced by vehicles passing over a structure. Measurements are usually conducted with strain gauges and strain transducers. The measured strains are converted into axle weights based on the selected algorithm [
10]. The first algorithm [
5] using bridge influence lines was improved and supplemented by [
11]; the comparative analysis of algorithms in B-WIM is described in [
12].
B-WIM systems are available in the literature [
11,
13,
14]. The advantage of the B-WIM system is the reduction of the dynamic effects due to the fact that the bridge deck is used as a large weighing scale [
2]. The accuracy of the measurement depends on the bridge deck condition and surface smoothness, which may induce excessive bridge vibration. The B-WIM installation and equipment itself do not affect the structure of the bridge. Furthermore, the B-WIM system also informs about traffic and provides a realistic response of the structure.
There are numerous WIM stations all over the world, collecting millions of records with truck data every day. Many researchers have utilized the traffic data collected by WIM systems for efficient bridge design and evaluation. The truck traffic volume, axle weights, and vehicle configurations have changed during recent decades, and systematic traffic data collection and evaluation provides a rational basis to update the design and evaluation provisions for bridges. The traffic varies from site to site, hence, the WIM data can serve as a source to modify the live load factor for site-specific traffic. AASHTO LRFD provides the protocols to update the live load factor for local traffic. The AASHTO provisions are based on a set of protocols developed by Sivakumar [
15]. The truck traffic data was collected at different WIM sites around the US, and a reliability-based procedure was designed to determine the site-specific load factors. The method involves a list of requirements for WIM collection, quality, and quantity.
Traffic data can also be used to identify overloaded vehicles in order to assess their effect on infrastructure. Some studies have used WIM data to capture overloaded vehicles in the traffic flow [
16]. The overloaded vehicle evaluation may be essential in bridge posting decisions, and overloaded permit vehicles crossing the bridge can significantly contribute to the damage. Hence, permit vehicles’ short-term and long-term effect was studied to assess their impact [
17]. An increasing number of special permit vehicles, due to the escalated freight demand, can induce fatigue damage and reduce the bride load-carrying capacity. The development of rules that envelope the special vehicle load effects is very important to ensure infrastructure safety [
18]. Understanding the impact of overloaded heavy trucks is the key to proposing rational design and management provisions [
19]. Several studies have been conducted to determine the damage caused by permit vehicles to ensure the structures’ safety. The damage assessment criteria, traffic data collection, load effects computations were studied, and simulation techniques were used to optimize provisions for permit vehicles [
20,
21,
22]. The bridge evaluation, under existing traffic, utilized the notional design, legal, and permit vehicles, hence, the WIM data can be utilized to verify standard rating vehicles’ adequacy to check the existing bridges’ live load-carrying capacity. To maintain the bridge’s safety, a live load analysis is required, therefore, several studies have used WIM data to update the live load model to site-specific traffic characteristics. Moses provided a simplified method to compute live load factors for bridge evaluation for the site-specific traffic [
23]. The WIM system collects the majority of the traffic data utilized for the bridge live load development [
24,
25]. The live load models were then created to assess the traffic-induced effects and provide a rational basis to update the live load provisions and give optimum safety levels [
26,
27].
This study presents data collection and analysis for measured vehicles using portable scales, truck weigh station, WIM, and B-WIM systems. The statistical analysis of four different weighing systems were compared to assess static and dynamic systems’ accuracy.
4. Discussion
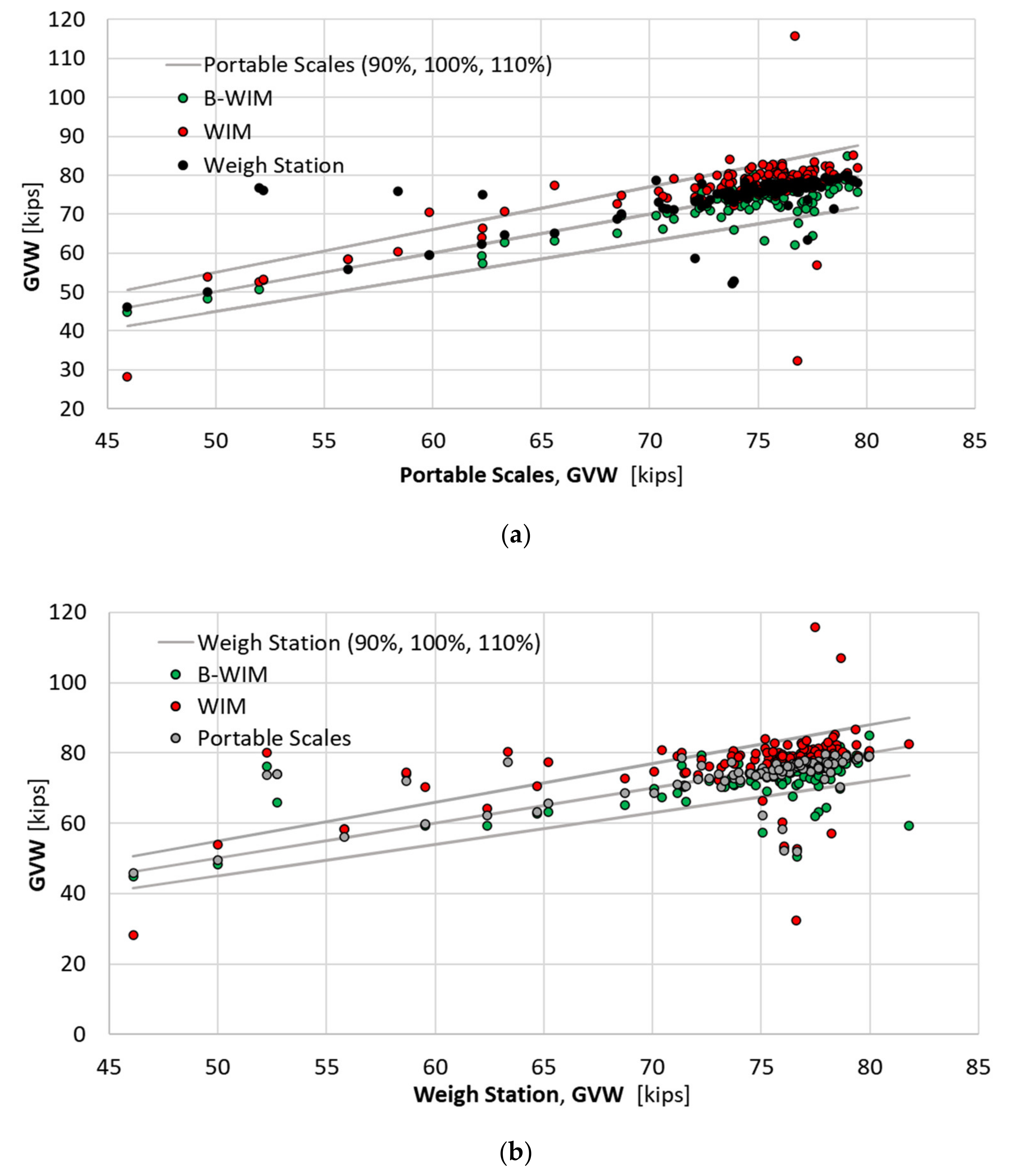
The statistical parameters, such as mean and standard deviation, were calculated for all four weighing systems. For GVW, the minimum difference between the mean values of GVW recorded by portable scales and B-WIM system was 0.8 kips, and the standard deviation of the results was 5.6 kips for portable scales and 6.5 for B-WIM system. In contrast, the highest difference between the mean values of GVW was observed for WIM, with the highest standard deviation of 8.8 kips. For the axle weight measurements, the largest difference between the mean and standard deviation values was observed for the WIM measurement data set. It can be noticed that in the case of axles one to three loads, the difference in statistical parameters was relatively low. The most significant difference was for axle four and five. The average axle 1–3 loads were almost the same (around 16 kips), but in the case of axle four and five loads, the values of standard deviation are over 2.0 kips. Tandem axle weight analysis showed that in comparison to the certificated portable scales, the lowest difference between the mean and standard deviation values was observed in the case of the static scale’s measurements data, the set for both the first tandem (axle 2 and 3) and the second one (axle 4 and 5). B-WIM measurement results mean that standard deviation values were slightly lower than the portable scales, but the statistical parameters’ difference is relatively low. However, the most significant differences were noticed in WIM measurements. The standard deviation value was almost three times higher, and then the value of the standard deviation was obtained by the portable scale measuring technique. It means that the results of measurements varied much more.
The multiple
t-tests for paired means were conducted to check whether there was enough evidence to claim a difference in vehicle weight attributes for a 95% confidence interval. The mean difference and standard deviation of difference were computed.
Table 8 summarizes the results of the mean and standard deviation of difference, compared to portable scales and weigh station measurements. Based on the comparison to portable scales measurements, it could be noticed that the mean difference was the smallest for weigh station measurements. The mean difference for GVW, AG1, AG2 was larger for WIM measurements than B-WIM. On the other hand, in comparison to weigh station measurements, it can be concluded that the mean difference was the smallest for portable scales but the largest for WIM measurements. Only, the first axle weight (W1) is larger for B-WIM measurements in comparison to the weigh station. The next step was to calculate the standard error for the compared measurements and find the t-value.
Table 6 showed the calculated
t-values for compared weighing systems. It can be concluded that t_stat was greater than t_crit. Therefore, the null hypothesis can be rejected, which means that with 95% confidence, there was enough evidence to claim there was a difference in the static and dynamic measurements. In the
t-test analysis, the measurement tolerances were not taken into account.
Since the
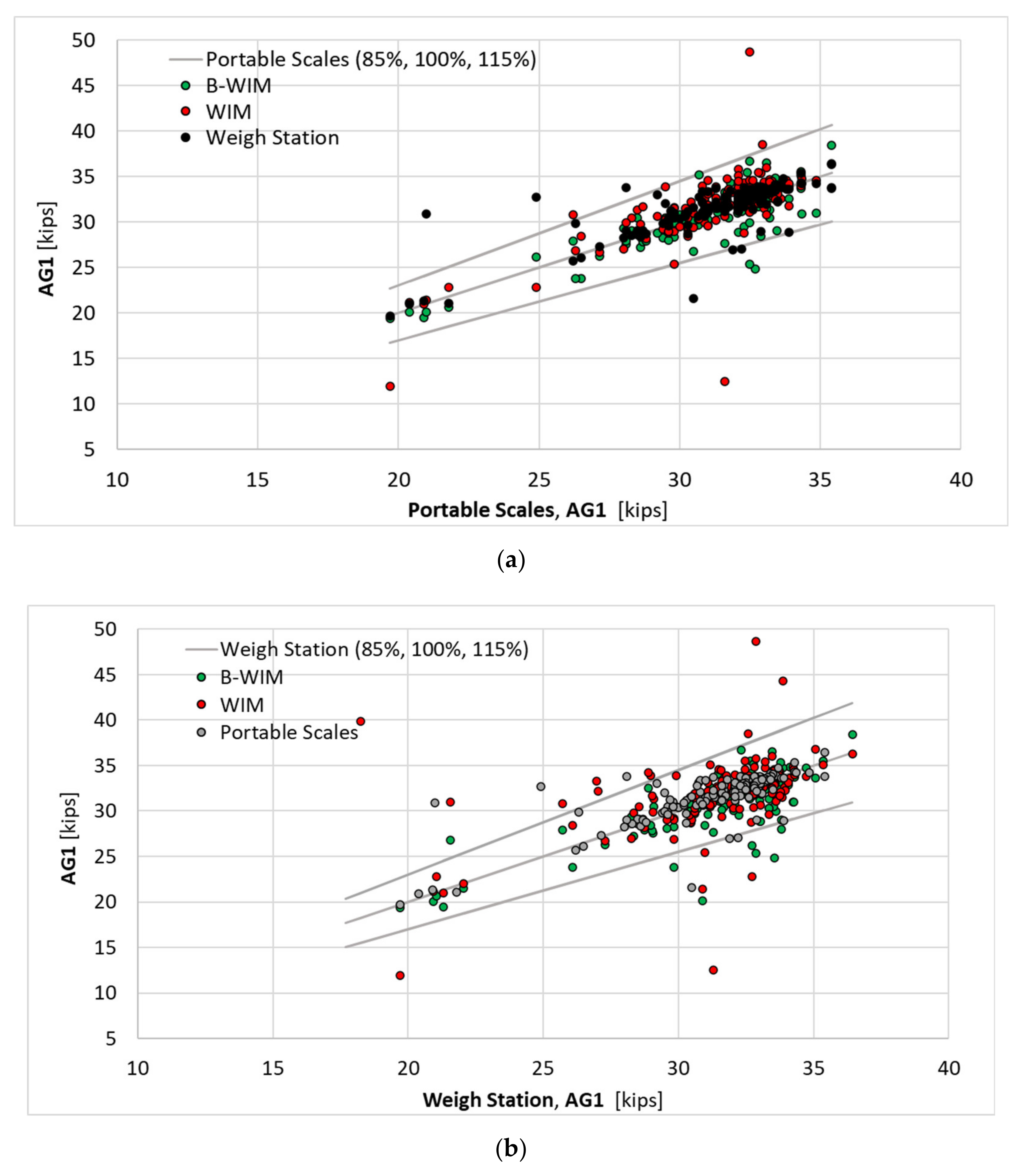
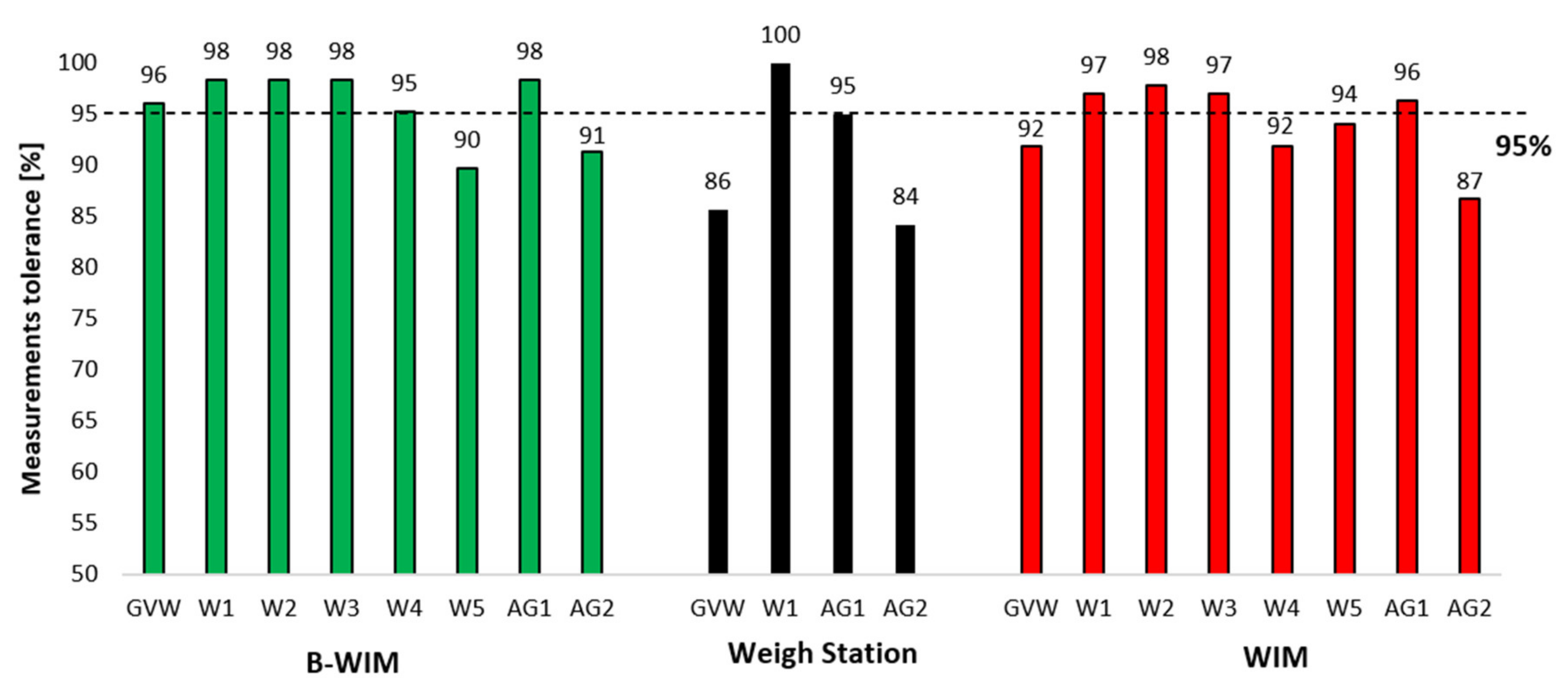
t-test concluded that the measurements are statistically different, it is crucial to account for the allowable tolerances specified by ASTM 1318E-09 WIM Type I. The traffic weight measurement tolerances established by ASTM WIM Type I indicated ±10% tolerance for GVW measurements, ±20% for individual axle weight, and ±15% for a group of axles. The tolerances needed to be within 95% of the respective data items recorded by the WIM system. The analysis was conducted for portable scales, where those certified scales were compared to weigh station, WIM, and B-WIM measurements.
Figure 10 shows the results of the analysis of available measured vehicle attributes. For B-WIM measurements, almost all measured attributes are with the tolerance requirements. Only the 5th axle weight and second tandem axle (axle 4 + 5) provide the results at 90% tolerance, which is very close to the desired safety level. For the truck weigh station, the 1st axle weight measurements indicated 100% of the tolerance level measurements. But GVW and second tandem axle weight was below the required 95% compliance, and the tolerance was at 84–86%. Most of the measured vehicle attributes fulfilled the WIM measurements’ requirements, but in the case of GVW, the 4th axle weight and second tandem axle provided a tolerance that varied between 87–92%. It was in very close proximity to the anticipated safety level. For all three weighing systems compared to the certified portable scales, it could be noticed that the last two axles, and therefore the second tandem axle, provided the lowest tolerance level.
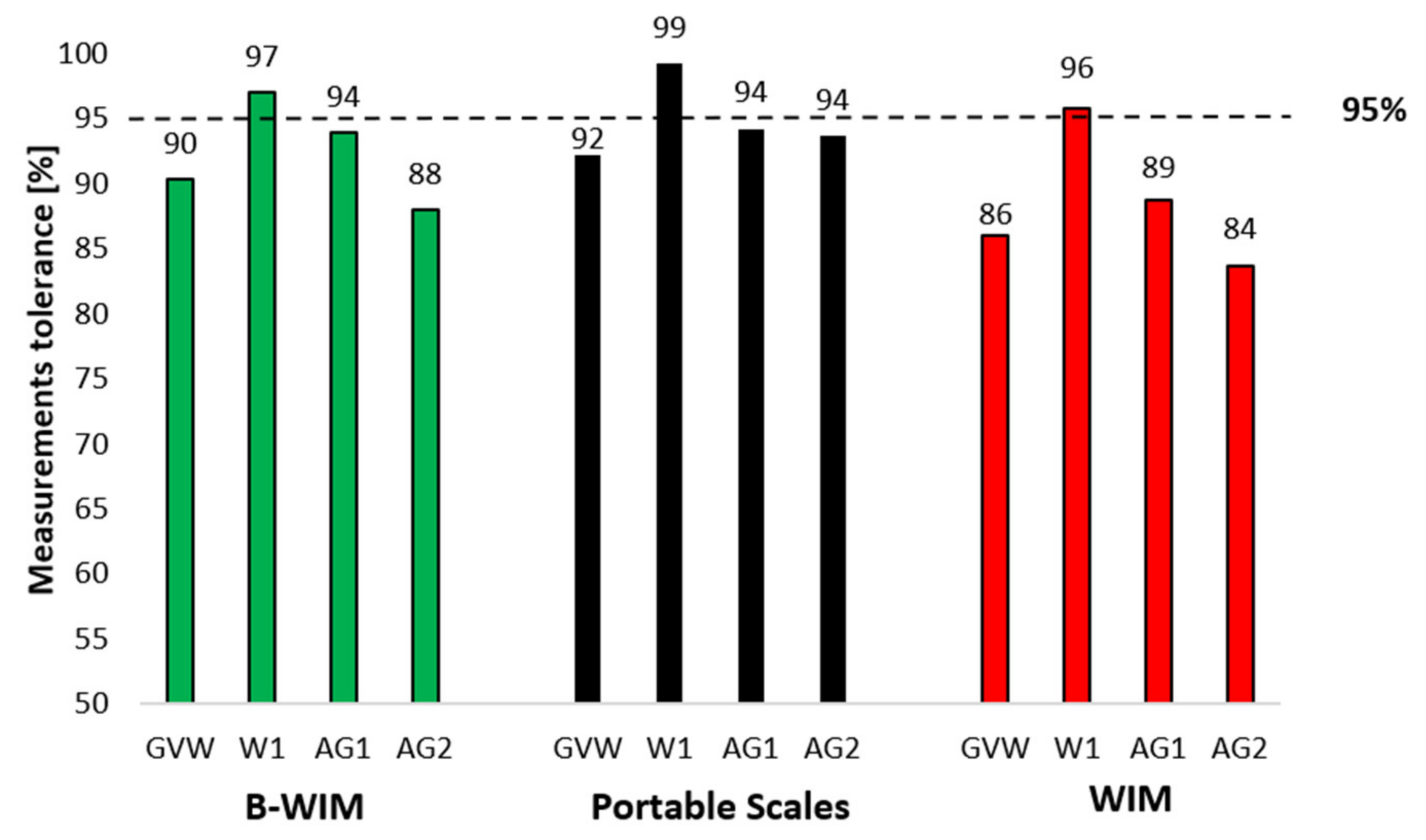
The tolerance check was conducted for the truck weigh station, which captured: GVW, 1st axle weight, and two tandems. Those vehicle attributes were compared to B-WIM, portable scales, and WIM measurements.
Figure 11 presents a summary of the tolerance analysis. B-WIM’s tolerance level varied from 88–97%, which was close to the required safety. For portable scale measurements, the tolerance varied between 92–99%, which gave good results while comparing static weight measurements. The WIM data tolerances were between 84–96%, where the GVW and two tandems were below the required safety level. Also, in comparison to the tolerances with truck weigh station, it was noticed that the second tandem axle measurements provided the lowest tolerance to meet the 95% compliance.
Correlation coefficients were calculated for the portable scales data set and three other data weighing systems. The results are shown in
Table 7. The correlation coefficient for B-WIM measurements varied from 0.67 to 0.87. The weigh station’s correlation coefficient values varied from 0.64 to 0.80. This shows a high correlation between the portable scales, and B-WIM, and weigh stations. The lowest values of the correlation coefficient ranging from 0.60 to 0.76, which were moderate correlations, are obtained in the case of the WIM data set. On the other hand, the correlation coefficient was calculated in comparison to truck weigh station measurements for GVW, 1st axle weight, and two groups of tandem axles. The strongest correlation was noticed with portable scales, where the value of the correlation coefficient was between 0.64–80 (moderate/high correlation). The B-WIM and truck weigh station correlation varied between 0.59–0.77, which was also a moderate/high correlation. The WIM measurement correlation was the weakest, providing a correlation coefficient between 0.45–52 (modest/moderate correlation). The stronger linear correlation was reported by comparing the measurements to portable scales. A high linear correlation coefficient was noticed for the first axle weight and first tandem axle, but the weakest for GVW and the second tandem axle.
This study can be beneficial for state agencies, bridge owners, consulting companies, weight measurement equipment producers, and researchers. The comparative analysis of measurement techniques provides the advantages and disadvantages of considered techniques. Accurate traffic measurements are critical for all stakeholders involved. Therefore, the same vehicles’ comparative measurements can help verify the measuring systems, calibrate them, and improve the performance. Systematic static weight comparison between the truck weigh station, and portable scales allow maintaining the good accuracy of the heavy traffic measurements. Similarly, in pavement and bridge WIM systems, measurements can be calibrated by the comparative analysis. The efficient, scheduled calibration of weighing systems is vital to maintain infrastructure safety and adequately manage the repair and replacement work. The traffic measurements are critical for the bridge and road inspections, live load model development, a site-specific update of safety factors for design and evaluation. The weigh-in-motion technology continuously monitors traffic-induced loads and allows us to assess their impact on bridge and pavement conditions. Accurate measurements allow improving the infrastructure life cycle analysis.
In this study, it was noticed for all considered measurement techniques that the further from the steering axle, the bigger error was captured. It may be concluded, the more significant number of axles, the more probable to have a larger measurement error. The analysis indicated that axle 4 and 5 measurements, and accordingly, the second tandem provided the biggest variation and tolerance error.
5. Conclusions
The development of weighing vehicle systems provides a tool to measure the impact of live load on road infrastructure. This knowledge is helpful in the management of roads and bridges, in the design, evaluation, maintenance, and improvement. Accurate and reliable measurements allow for a better estimation of the traffic-induced effects. There are new opportunities to use non-invasive weigh-in-motion systems, which do not interrupt and delay traffic and road infrastructure. Weigh-in-motion systems can continuously collect traffic weight data. In this study, the static and dynamic vehicle weight measurements were compared to assess the accuracy of the measurements. Four weigh measuring systems were considered: portable scales, truck weigh station, WIM, and B-WIM. About 150 trucks were measured, and statistical analysis was conducted to compare the differences between the measuring systems by multiple
t-tests, ASTM E1318-09 [
29] tolerance check, and correlation coefficient calculation.
Based on this study, it can be concluded that the certificated portable scales are accurate but cumbersome in operation, and the measurements are time-consuming. Furthermore, operators and drivers have to be involved. This is a selective method that only captures selected vehicles, however, because of accuracy, they were used as a reference point in t-test and tolerance analysis. The portable scale measurements were compared to the truck weigh station. The tolerance comparison indicated 92–99% of tolerance for measured attributes. The linear correlation coefficient varies from 0.64–0.80, proving the strong correlation between the measurement by both static scales.
Truck weigh stations also provide accurate results, but their operation is expensive and, therefore, inefficient. Moreover, their location is well known, and haulers of illegally overloaded vehicles can find alternative routes and avoid being ticketed. The weigh station measurement was used as a reference point for weigh-in-motion measurements. Additionally, truck weigh station measurements were compared with portable scales, where tolerances between the analyzed vehicle attributes vary from 84–100%. It provided good results, but some of the measurements are below the required 95% compliance level.
Weigh-in-motion data can continuously measure vehicle attributes, which allows the collection of massive traffic data. The WIM data measurement tolerances were compared to portable scales, where 92–98% of the measurements were within the tolerance level. Only the second tandem axle provides 87% tolerance of the measurements. Throughout the analysis, axle 4th and 5th, and accordingly, the second tandem axle provide the lowest tolerance margin. The tolerance measurements in comparison to truck weigh stations were between 84–96%. Compared to portable scales, the linear coefficient of correlation varies between 0.60–0.76, which provides a moderate/high correlation. For the truck weigh station, its coefficient is 0.45–0.52, which presents a modest correlation.
B-WIM system is an efficient tool to measure bridge response to truck traffic. The results show that B-WIM provides reliable measurement data. The measured tolerances are between 90–98% compared to portable scales and 88–97% compared to truck weigh station. The correlation coefficient is 0.67–0.87 for portable scales and 0.59–0.77 to weigh station. That shows a high correlation and proves weight measurement’s reliability.
Moreover, the multiple t-test analysis was conducted to verify whether the measurements are different for a 95% confidence interval. It was proved that, for 95% confidence, the results are statistically different. If the tolerances are considered, it can be concluded that most of the measured vehicle attributes provide accurate results that meet the ASTM requirements.
This study’s constraints include the sample size, consideration of only 5-axle vehicles. It may be essential to consider more distinguished vehicle weights and configurations to recognize any possible measurement technique limitations. In addition, different WIM type tolerances presented by ASTM could be considered to define the accuracy of measured vehicle parameters. The traffic weight measurement accuracy is crucial for the safety and management of infrastructure. Continuous traffic measurements can help maintain roads and bridges’ good condition and improve safety and economic growth.

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}










