
FlowHaptics: Mid-Air Haptic Representation of Liquid Flow


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Works
3. Methodology
3.1. Concept
3.2. Theory
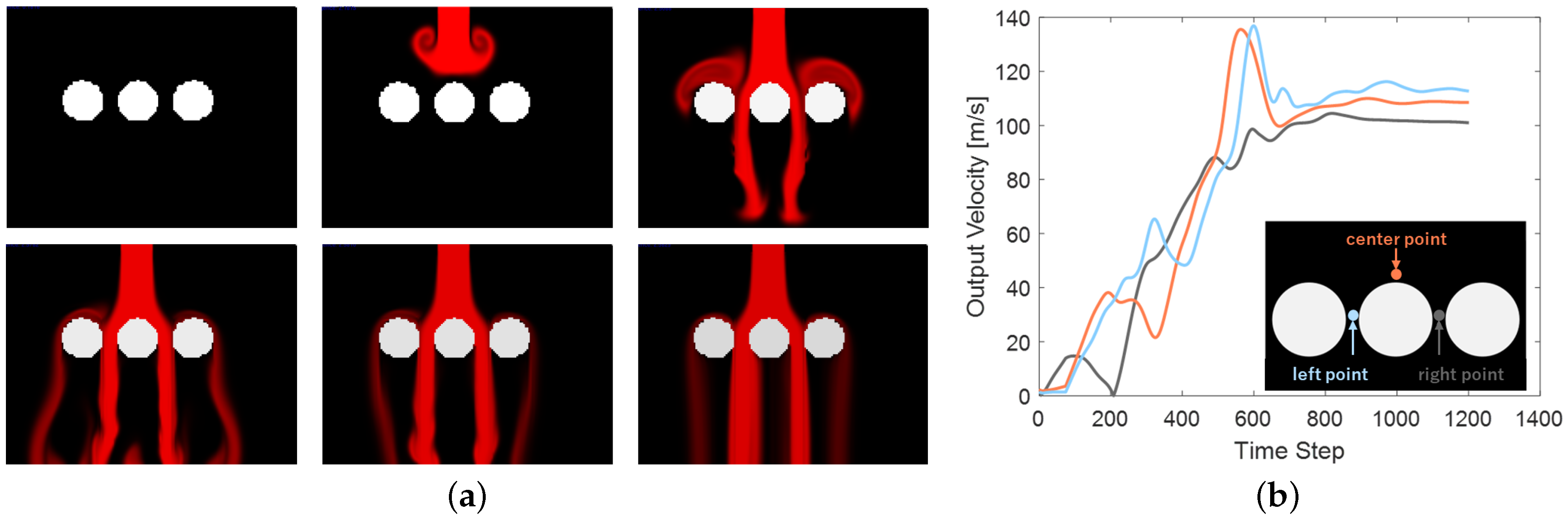
3.3. Fluid Flow Simulation
3.4. Device Configuration
3.5. Flow Control System
4. Experiment 1: Flow Sensation with Velocity Change
4.1. Experimental Conditions and Settings
- 1F: the condition in which only the middle finger was presented to the device;
- 3F: the condition in which the index finger, middle finger, and ring finger were presented to the device.
- 1T: the condition in which FlowHaptics the air was ejected only from the center nozzle;
- 3T: the condition in which FlowHaptics the air was ejected from all 3 nozzles.
4.2. Results and Discussions
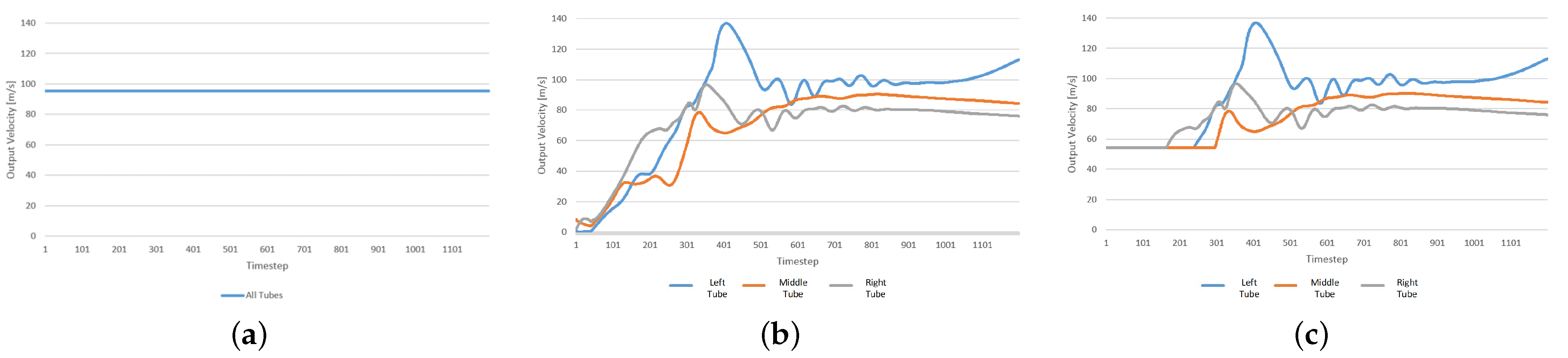
5. Experiment 2: Different Velocity Profiles
5.1. Experimental Conditions and Settings
5.2. Results and Discussions
6. Conclusions
7. Limitations and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Agency, C.I. The CIA World Factbook 2010; Skyhorse Publishing Inc.: New York, NY, USA, 2009. [Google Scholar]
- Mitchell, J.L. Real-time synthesis and rendering of ocean water. ATI Res. Tech. Rep. 2005, 4, 121–126. [Google Scholar]
- Darles, E.; Crespin, B.; Ghazanfarpour, D.; Gonzato, J.C. A Survey of Ocean Simulation and Rendering Techniques in Computer Graphics; Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2011; Volume 30, pp. 43–60. [Google Scholar]
- Tompson, J.; Schlachter, K.; Sprechmann, P.; Perlin, K. Accelerating eulerian fluid simulation with convolutional networks. In Proceedings of the 34th International Conference on Machine Learning, Sydney, NSW, Australia, 6–11 August 2017; pp. 3424–3433. [Google Scholar]
- Carter, T.; Seah, S.A.; Long, B.; Drinkwater, B.; Subramanian, S. UltraHaptics: Multi-point midair haptic feedback for touch surfaces. In Proceedings of the 26th Annual ACM Symposium on User Interface Software and Technology, St. Andrews, UK, 8–11 October 2013; pp. 505–514. [Google Scholar]
- Chacin, A.C.; Oozu, T.; Iwata, H. IrukaTact: Submersible Haptic Search Glove. In Proceedings of the TEI’16: Tenth International Conference on Tangible, Embedded, and Embodied Interaction, Eindhoven, The Netherlands, 14–17 February 2016; pp. 392–397. [Google Scholar]
- Jun, J.H.; Park, J.R.; Kim, S.P.; Bae, Y.M.; Park, J.Y.; Kim, H.S.; Choi, S.; Jung, S.J.; Park, S.H.; Yeom, D.I.; et al. Laser-induced thermoelastic effects can evoke tactile sensations. Sci. Rep. 2015, 5, 11016. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sodhi, R.; Poupyrev, I.; Glisson, M.; Israr, A. AIREAL: Interactive tactile experiences in free air. ACM Trans. Graph. (TOG) 2013, 32, 134. [Google Scholar] [CrossRef]
- Tsalamlal, M.Y.; Ouarti, N.; Martin, J.C.; Ammi, M. Haptic communication of dimensions of emotions using air jet based tactile stimulation. J. Multimodal User Interfaces 2015, 9, 69–77. [Google Scholar] [CrossRef]
- Tsalamlal, M.Y.; Ouarti, N.; Ammi, M. Psychophysical study of air jet based tactile stimulation. In Proceedings of the World Haptics Conference (WHC), Daejeon, Korea, 14–17 April 2013; pp. 639–644. [Google Scholar]
- Lee, J.; Lee, G. Designing a Non-contact Wearable Tactile Display Using Airflows. In Proceedings of the 29th Annual Symposium on User Interface Software and Technology, Tokyo, Japan, 16–19 October 2016; pp. 183–194. [Google Scholar]
- Saito, R.; Suzuki, M.; Maeno, T.; Mayama, H.; Nonomura, Y. Tactile Texture and Friction Properties of Water on Artificial Skin Surfaces. Trans. Soc. Instrum. Control Eng. 2014, 50, 2–8. [Google Scholar] [CrossRef] [Green Version]
- Iwata, H.; Noma, H. Volume haptization. In Proceedings of the 1993 IEEE Research Properties in Virtual Reality Symposium, San Jose, CA, USA, 25–26 October 1993; pp. 16–23. [Google Scholar] [CrossRef]
- Baxter, W.; Lin, M.C. Haptic Interaction with Fluid Media. In Proceedings of Graphics Interface 2004; Canadian Human-Computer Communications Society, School of Computer Science, University of Waterloo: Waterloo, ON, Canada, 2004; pp. 81–88. [Google Scholar]
- 3D Printers, Software, Manufacturing & Digital Healthcare. 3D Systems. Available online: https://www.3dsystems.com/ (accessed on 12 June 2005).
- Yano, H.; Hirose, M.; Ogi, T.; Tamura, Y. Haptization of flow field using vibroglove. Trans. Inf. Process. Soc. Jpn. 1999, 49, 414–421. [Google Scholar]
- Barreiro, H.; Sinclair, S.; Otaduy, M.A. Ultrasound Rendering of Tactile Interaction with Fluids. In Proceedings of the IEEE World Haptics Conference, Tokyo, Japan, 9–12 July 2019. [Google Scholar]
- White, F.M. Fluid Mechanics; Technical Report; McGraw-Hill: New York, NY, USA, 1986. [Google Scholar]
- Shakib, F.; Hughes, T.J.; Johan, Z. A new finite element formulation for computational fluid dynamics: X. The compressible Euler and Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 1991, 89, 141–219. [Google Scholar] [CrossRef]
- Gerstenberger, A.; Wall, W.A. An extended finite element method/Lagrange multiplier based approach for fluid–structure interaction. Comput. Methods Appl. Mech. Eng. 2008, 197, 1699–1714. [Google Scholar] [CrossRef]
- Jasak, H.; Jemcov, A.; Tukovic, Z. OpenFOAM: A C++ library for complex physics simulations. In Proceedings of the International Workshop on Coupled Methods in Numerical Dynamics, IUC Dubrovnik, Croatia, 19–21 September 2007; Volume 1000, pp. 1–20. [Google Scholar]
- Ekambara, K.; Sanders, R.S.; Nandakumar, K.; Masliyah, J.H. Hydrodynamic simulation of horizontal slurry pipeline flow using ANSYS-CFX. Ind. Eng. Chem. Res. 2009, 48, 8159–8171. [Google Scholar] [CrossRef]
- Pu, J.; Ramani, K. On Visual Similarity Based 2D Drawing Retrieval. Comput. Aided Des. 2006, 38, 249–259. [Google Scholar] [CrossRef]
- Kato, G.; Kuroda, Y.; Nisky, I.; Kiyokawa, K.; Takemura, H. HapSticks: Tool-Mediated Interaction with Grounding-Free Haptic Interface. In Proceedings of the SIGGRAPH Asia 2015 Haptic Media and Contents Design, Kobe, Japan, 2 November 2015; Association for Computing Machinery: New York, NY, USA, 2015. [Google Scholar] [CrossRef]
- Quek, Z.F.; Schorr, S.B.; Nisky, I.; Okamura, A.M.; Provancher, W.R. Augmentation Of Stiffness Perception with a 1-Degree-of-Freedom Skin Stretch Device. IEEE Trans.-Hum.-Mach. Syst. 2014, 44, 731–742. [Google Scholar] [CrossRef]












Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ratsamee, P.; Orita, Y.; Kuroda, Y.; Takemura, H. FlowHaptics: Mid-Air Haptic Representation of Liquid Flow. Appl. Sci. 2021, 11, 8447. https://doi.org/10.3390/app11188447
Ratsamee P, Orita Y, Kuroda Y, Takemura H. FlowHaptics: Mid-Air Haptic Representation of Liquid Flow. Applied Sciences. 2021; 11(18):8447. https://doi.org/10.3390/app11188447
Chicago/Turabian StyleRatsamee, Photchara, Yusuke Orita, Yoshihiro Kuroda, and Haruo Takemura. 2021. "FlowHaptics: Mid-Air Haptic Representation of Liquid Flow" Applied Sciences 11, no. 18: 8447. https://doi.org/10.3390/app11188447