
Learning Spatial–Temporal Background-Aware Based Tracking

Abstract
:1. Introduction
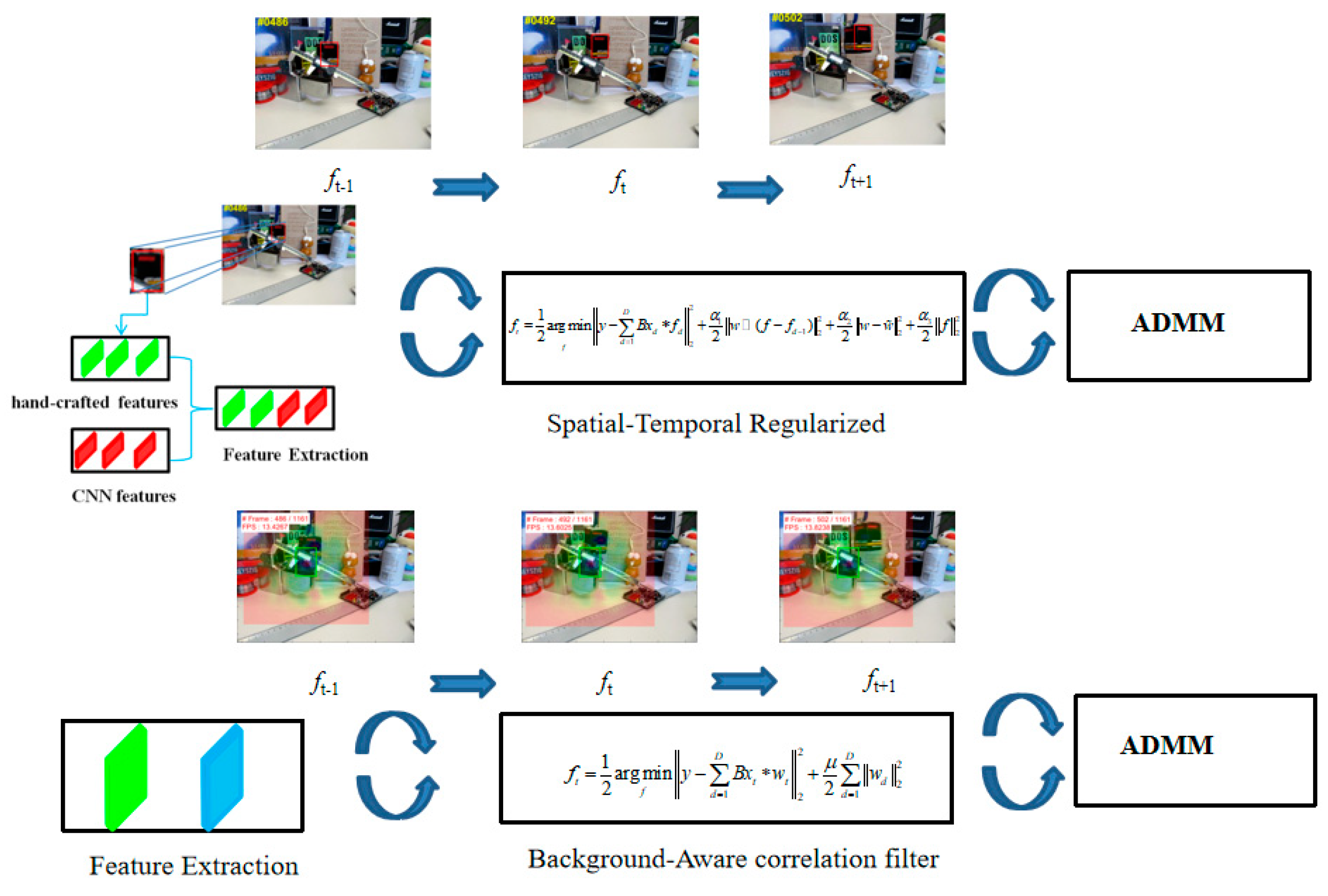
- A spatial–temporal regularization background-aware DCF based model is proposed, which can deal robustly with boundary effects and complex appearance changes.
- Our model can effectively be solved by the alternating direction multiplier method (ADMM), and each sub-problem has a corresponding closed solution.
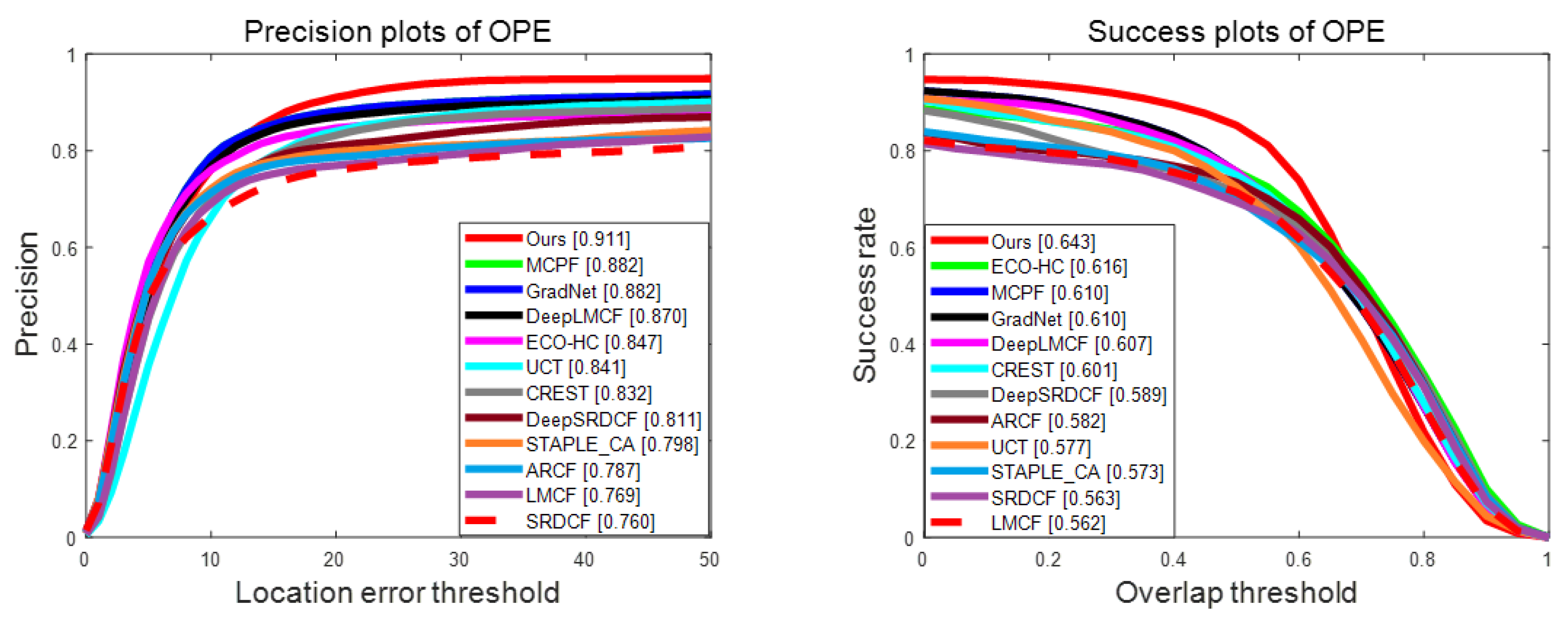
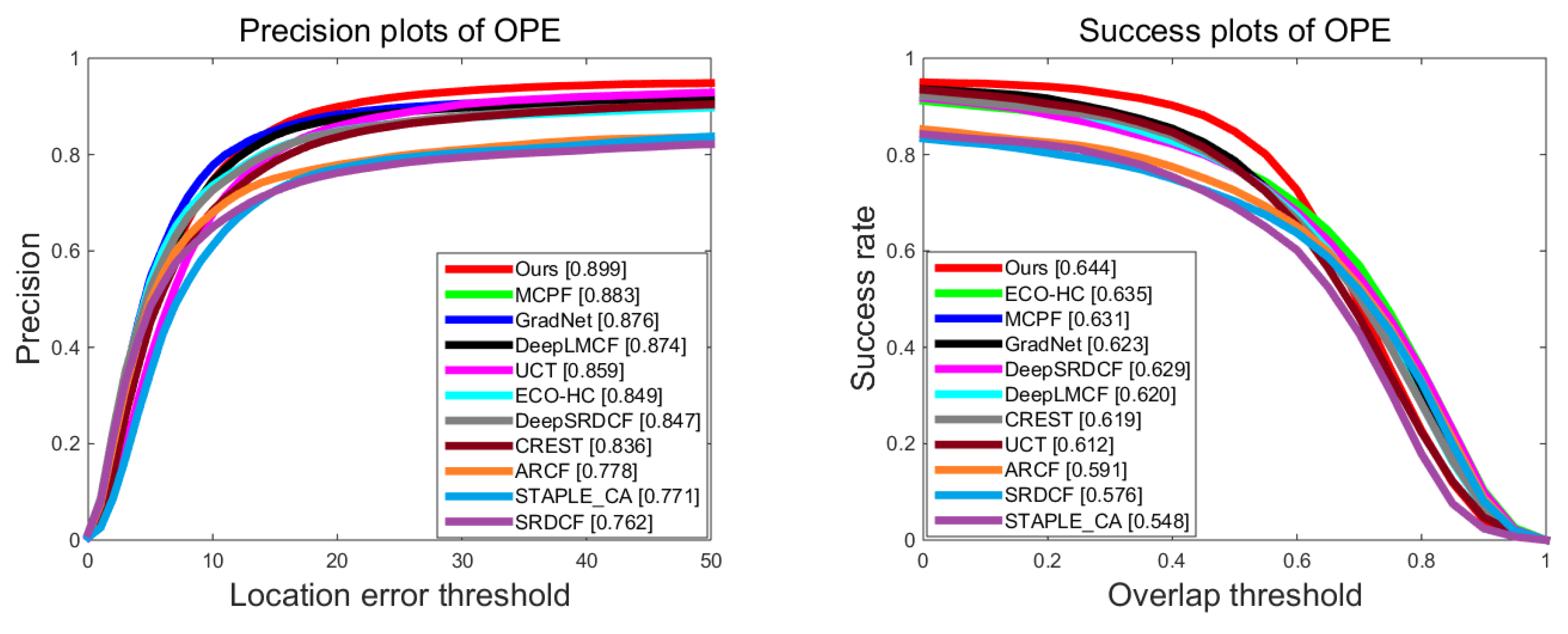
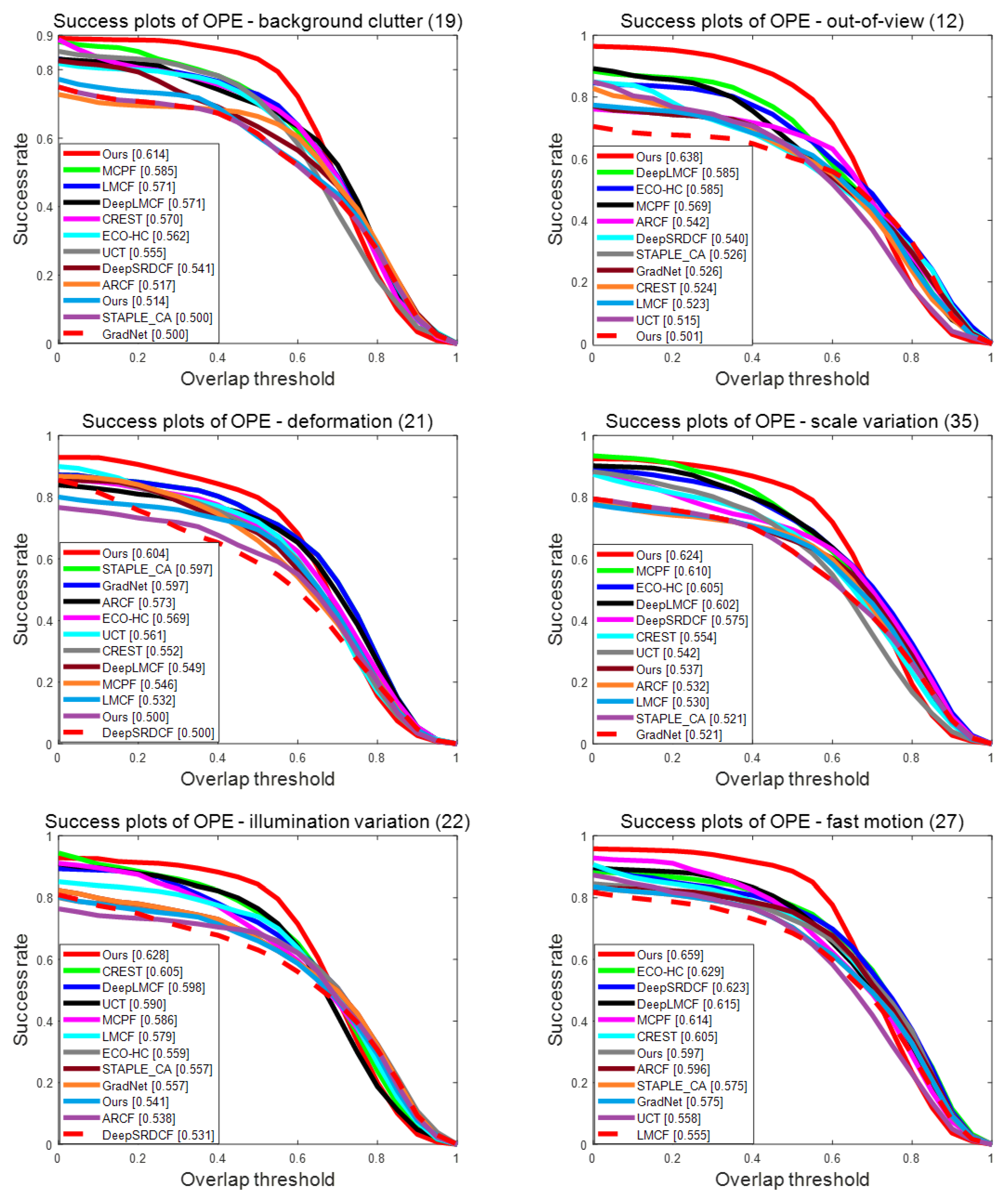
- The proposed tracker gains promising tracking performance and significantly outperforms than other state-of-the-art DCF based tracker in accurate and overlap success rate.
2. Related Works
3. Spatial–Temporal Regularization Background-Aware Correlation Filter
3.1. Background-Aware Correlation Filters Framework
3.2. The Objective Function of the Proposed Model
3.3. Optimization of the Proposed Model
3.4. Lagrangian Parameter Update
4. Experiments
4.1. Implementation Details
4.2. The Overall Tracking Results on OTB Dataset
4.3. The Overall Tracking Results on Temple-Color 128 Dataset
4.4. The Overall Tracking Results on UAV123 Dataset
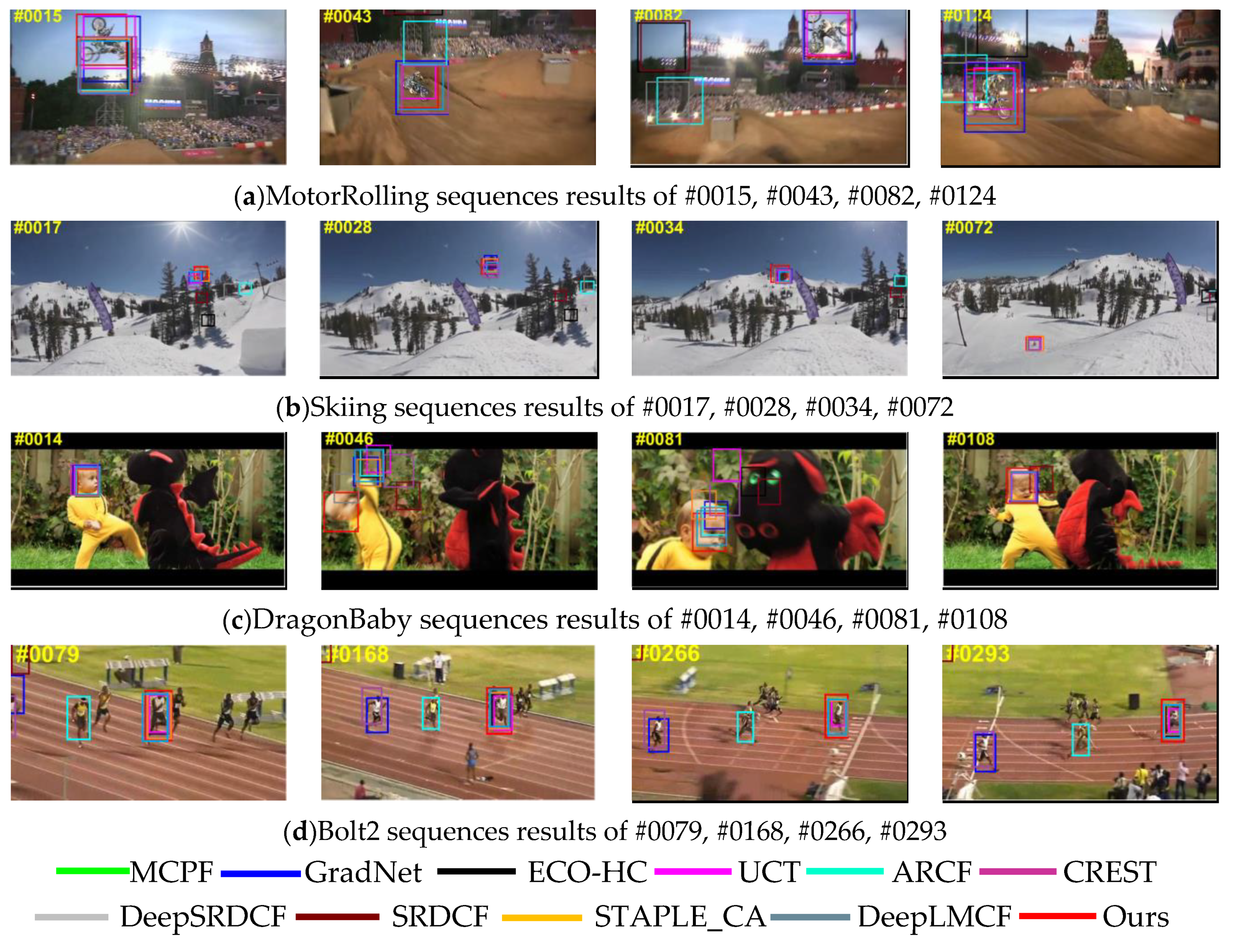
4.5. The Qualitative Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Danelljan, M.; Häger, G.; Khan, F.; Felsberg, M. Accurate Scale Estimation for Robust Visual Tracking; BMVA Press: London, UK, 2014. [Google Scholar]
- Li, Y.; Zhu, J. A Scale Adaptive Kernel Correlation Filter Tracker with Feature Integration; European Conference on Computer Vision; Springer: Cham, Switzerland, 2014; pp. 254–265. [Google Scholar]
- Wang, N.; Zhou, W.; Tian, Q.; Hong, R.; Wang, M.; Li, H. Multi-cue Correlation Filters for Robust Visual Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 4844–4853. [Google Scholar]
- Ma, C.; Huang, J.; Yang, X.; Yang, M. Hierarchical Convolutional Features for Visual Tracking. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 3074–3082. [Google Scholar]
- Qi, Y.; Zhang, S.; Qin, L.; Yao, H.; Huang, Q.; Lim, J.; Yang, M.H. Hedged Deep Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4303–4311. [Google Scholar]
- Mueller, M.; Smith, N.; Ghanem, B. Context-Aware Correlation Filter Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1396–1404. [Google Scholar]
- Zhang, K.; Zhang, L.; Yang, M.H.; Zhang, D. Fast Tracking via Spatio-Temporal Context Learning. In Proceedings of the European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014; pp. 127–141. [Google Scholar]
- Liu, S.; Zhang, T.Z.; Cao, X.C.; Xu, C.S. Structural correlation filter for robust visual tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4312–4320. [Google Scholar]
- Liu, T.; Wang, G.; Yang, Q.X. Real-time part-based visual tracking via adaptive correlation filters. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 4902–4912. [Google Scholar]
- Tang, M.; Yu, B.; Zhang, F.; Wang, J.Q. High-Speed Tracking with Multi-kernel Correlation Filters. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 4874–4883. [Google Scholar]
- Zhang, T.Z.; Xu, C.S.; Yang, M.H. Multi-task Correlation Particle Filter for Robust Object Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4335–4343. [Google Scholar]
- Zhang, T.Z.; Liu, S.; Xu, C.S.; Liu, B.; Yang, M.H. Correlation Particle Filter for Visual Tracking. In IEEE Transactions on Image Processing; IEEE: Piscataway, NJ, USA, 2018; Volume 27, pp. 2676–2687. [Google Scholar]
- Li, B.; Wu, W.; Wang, Q.; Zhang, F.; Xing, J.; Yan, J. SiamRPN++: Evolution of Siamese Visual Tracking with Very Deep Networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2019; pp. 4282–4291. [Google Scholar]
- Wang, Q.; Zhang, L.; Bertinetto, L.; Hu, W.; Torr, P.H.S. Fast Online Object Tracking and Segmentation: A Unifying Approach. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 1328–1338. [Google Scholar]
- Zhang, Z.P.; Peng, H.W. Deeper and Wider Siamese Networks for Real-Time Visual Tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 4591–4600. [Google Scholar]
- Zhang, W.; Du, Y.; Chen, Z.; Deng, J.; Liu, P. Robust adapitive learning with Siamese network architecture for visual. Vis. Comput. 2021, 37, 881–894. [Google Scholar] [CrossRef]
- Voigtlaender, P.; Luiten, J.; Torr, P.H.S.; Leibe, B. Siam R-CNN:Visual Tracking by Re-Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 6578–6588. [Google Scholar]
- Valmadre, J.; Bertinetto, L.; Henriques, J.; Vedaldi, A.; Torr, P.H.S. End-to-End Representation Learning for Correlation Filter Based Tracking. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 5000–5008. [Google Scholar]
- Song, Y.B.; Ma, C.; Gong, L.J.; Zhang, J.W.; Lau, R.W.H.; Yang, M.Y. CREST: Convolutional Residual Learning for Visual Tracking. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2555–2564. [Google Scholar]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. ECO: Efficient Convolution Operators for Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6638–6646. [Google Scholar]
- Danelljan, M.; Robinson, A.; Khan, F.S.; Felsberg, M. Beyond Correlation Filters: Learning Continuous Convolution Operators for Visual Tracking. In European Conference on Computer Vision; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Danelljan, M.; Häger, G.; Khan, F.S.; Felsberg, M. Learning Spatially Regularized Correlation Filters for Visual Tracking. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 4310–4318. [Google Scholar]
- Galoogahi, H.K.; Fagg, A.; Lucey, S. Learning Background-Aware Correlation Filters for Visual Tracking. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 1144–1152. [Google Scholar]
- Li, F.; Tian, C.; Zuo, W.M.; Zhang, L.; Yang, M.H. Learning Spatial-Temporal Regularized Correlation Filters for Visual Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 4904–4913. [Google Scholar]
- Huang, Z.H.; Fu, C.H.; Li, Y.M.; Lin, F.L.; Lu, P. Learning Aberrance Repressed Correlation Filters for Real-Time UAV Tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019; pp. 2891–2900. [Google Scholar]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2544–2550. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the Circulant Structure of Tracking-by-Detection with Kernels. In Proceedings of the 12th European Conference on Computer Vision, Florence, Italy, 7–13 October 2012. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-Speed Tracking with Kernelized Correlation Filters. IEEE Trans. pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, F.; Yao, Y.J.; Li, P.H.; Zhang, D.; Zuo, W.M.; Yang, M.H. Integrating Boundary and Center Correlation Filters for Visual Tracking with Aspect Ratio Variation. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2001–2009. [Google Scholar]
- Bhat, G.; Johnander, J.; Danelljan, M.; Khan, F.S.; Felsberg, M. Unveiling the Power of Deep Tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 483–498. [Google Scholar]
- Dai, K.; Wang, D.; Lu, H.C.; Sun, C.; Li, J.H. Visual Tracking via Adaptive Spatially-Regularized Correlation Filters. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 4670–4679. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Golodetz, S.; Miksik, O.; Torr, P.H.S. Staple: Complementary Learners for Real-Time Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1401–1409. [Google Scholar]
- You, H.F.; Tian, S.W.; Yu, L.; Lv, Y.L. Pixel-Level Remote Sensing Image Recognition Based on Bidirectional Word Vectors. IEEE Trans. Geosci. Remote. Sens. 2020, 58, 1281–1293. [Google Scholar] [CrossRef]
- Cai, W.W.; Wei, Z.G. PiiGAN: Generative Adversarial Networks for Pluralistic Image Inpainting. IEEE Access 2020, 8, 48451–48463. [Google Scholar] [CrossRef]
- Convertini, N.; Dentamaro, V.; Impedovo, D.; Pirlo, G.; Sarcinella, L. A Controlled Benchmark of Video Violence Detection Techniques. Information 2020, 11, 321. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, Q.; Xing, J.; Gao, J.; Peng, P.; Hu, W.; Maybank, S. Visual Tracking via Spatially Aligned Correlation Filters Network. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 469–485. [Google Scholar]
- Zhu, Z.; Wu, W.; Zou, W.; Yan, J. End-to-End Flow Correlation Tracking with Spatial-Temporal Attention. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 548–557. [Google Scholar]
- Sherman, J.; Morrison, W.J. Adjustment of an inverse matrix corresponding to a change in one element of a given matrix. Ann. Math. Stat. 1950, 21, 124–127. [Google Scholar] [CrossRef]
- Li, P.; Chen, B.Y.; Ouyang, W.L.; Wang, D.; Yang, X.Y.; Lu, H.C. GradNet: Gradient-Guided Network for Visual Object Tracking. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019; pp. 6162–6171. [Google Scholar]
- Danelljan, M.; Häger, G.; Khan, F.S.; Felsberg, M. Convolutional Features for Correlation Filter Based Visual Tracking. In Proceedings of the IEEE International Conference on Computer Vision (ICCV) Workshops, Santiago, Chile, 7–13 December 2015; pp. 58–66. [Google Scholar]
- Wang, M.; Liu, Y.; Huang, Z. Large Margin Object Tracking with Circulant Feature Maps. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4021–4029. [Google Scholar]
- Zhu, Z.; Huang, G.; Zou, W.; Du, D.; Huang, C. UCT: Learning Unified Convolutional Networks for Real-Time Visual Tracking. In Proceedings of the 2017 IEEE International Conference on Computer Vision Workshops (ICCVW), Venice, Italy, 22–29 October 2017; pp. 1973–1982. [Google Scholar]
- Wu, Y.; Lim, J.; Yang, M. Object Tracking Benchmark. In IEEE Transactions on Pattern Analysis and Machine Intelligence; IEEE: Piscataway, NJ, USA, 2015; Volume 37, pp. 1834–1848. [Google Scholar]
- Yi, W.; Lim, J.; Yang, M.H. Online Object Tracking: A Benchmark. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013. [Google Scholar]
- Fan, H.; Ling, H.B. Parallel Tracking and Verifying: A Framework for Real-Time and High Accuracy Visual Tracking. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 5486–5494. [Google Scholar]
- Li, X.; Ma, C.; Wu, B.Y.; He, Z.Y.; Yang, M.H. Target-Aware Deep Tracking. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 1369–1378. [Google Scholar]
- Mueller, M.; Smith, N.; Ghanem, B. A Benchmark and Simulator for UAV Tracking. In Proceedings of the 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ARCF | STRCF | BACF | SRDCF | STAPLE_CA | MCPF | Ours | |
|---|---|---|---|---|---|---|---|
| Mean FPS | 15.3 | 24.2 | 26.7 | 3.8 | 35.3 | 1.8 | 5 |
| Tracker Name | DP | OS |
|---|---|---|
| ECO | 0.741 | 0.605 |
| ECO-HC | 0.726 | 0.551 |
| MCPF | 0.774 | 0.545 |
| BACF | 0.648 | 0.519 |
| TADT | 0.756 | 0.562 |
| PTAV | 0.742 | 0.546 |
| DeepSRDCF | 0.738 | 0.536 |
| STAPLE | 0.668 | 0.497 |
| SRDCF | 0.675 | 0.485 |
| STRCF | 0.723 | 0.553 |
| Ours | 0.780 | 0.566 |
| Tracker Name | OS |
|---|---|
| ECO-HC | 0.507 |
| DSST | 0.448 |
| SRDCF | 0.465 |
| BACF | 0.519 |
| STAPLE_CA | 0.562 |
| STAPLE | 0.546 |
| KCF | 0.406 |
| SAMF | 0.485 |
| ARCF | 0.600 |
| Ours | 0.572 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, P.; Liu, P.; Deng, J.; Chen, Z. Learning Spatial–Temporal Background-Aware Based Tracking. Appl. Sci. 2021, 11, 8427. https://doi.org/10.3390/app11188427
Gu P, Liu P, Deng J, Chen Z. Learning Spatial–Temporal Background-Aware Based Tracking. Applied Sciences. 2021; 11(18):8427. https://doi.org/10.3390/app11188427
Chicago/Turabian StyleGu, Peiting, Peizhong Liu, Jianhua Deng, and Zhi Chen. 2021. "Learning Spatial–Temporal Background-Aware Based Tracking" Applied Sciences 11, no. 18: 8427. https://doi.org/10.3390/app11188427
APA StyleGu, P., Liu, P., Deng, J., & Chen, Z. (2021). Learning Spatial–Temporal Background-Aware Based Tracking. Applied Sciences, 11(18), 8427. https://doi.org/10.3390/app11188427