
Robust Flow Field Signal Estimation Method for Flow Sensing by Underwater Robotics


Abstract
:1. Introduction
- Novelty recognition: one normal, known state signal is set first. Then, the test signal is compared with the normal signal. Their difference can be used to evaluate an environmental change. In this method, a statistical threshold value is set and used to eliminate the interference [26];
- Classification recognition: All states of the system are obtained first, and then they are divided into several known types. The test signal characteristics are identified and are used to evaluate an environment change [27];
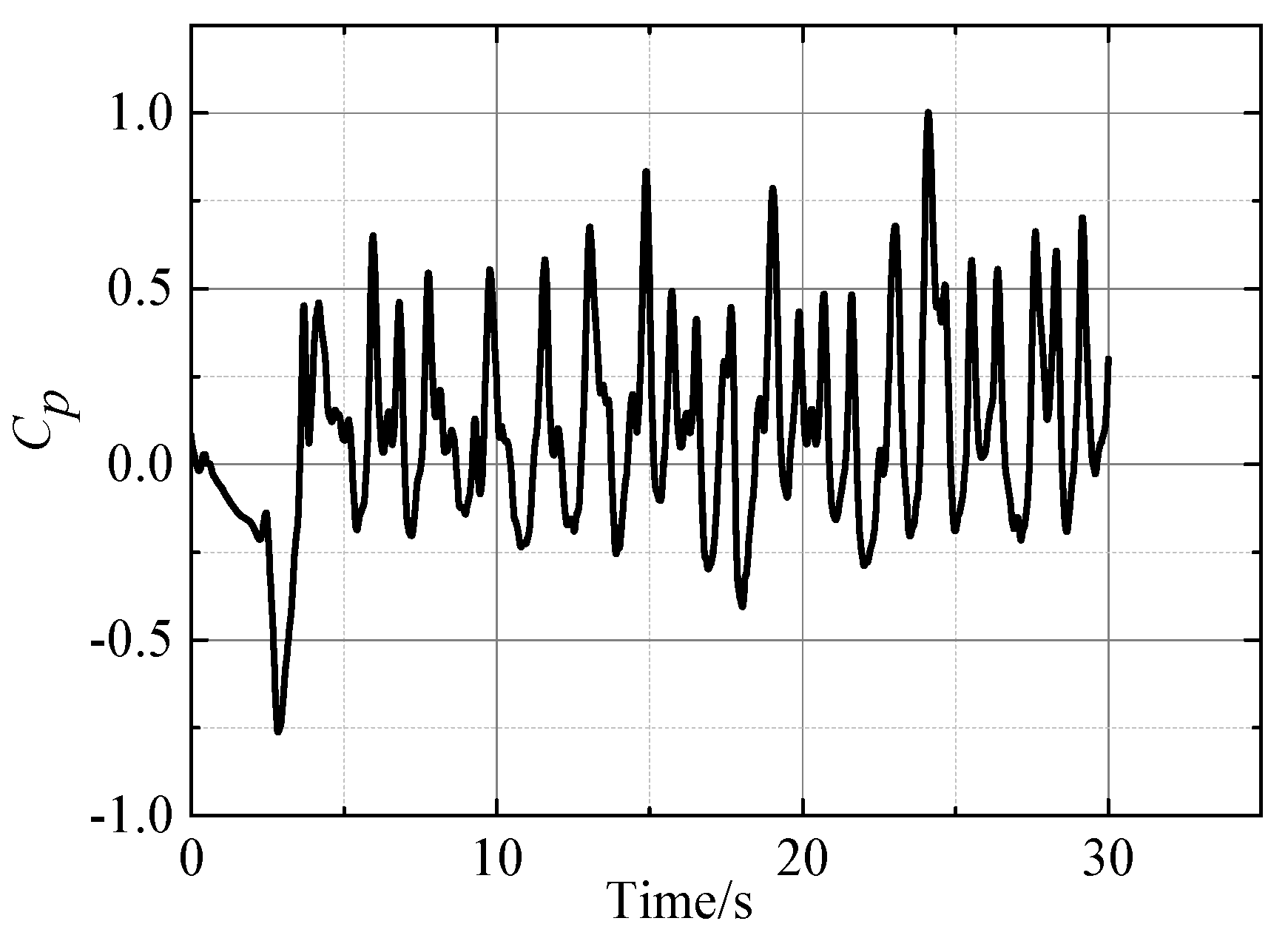
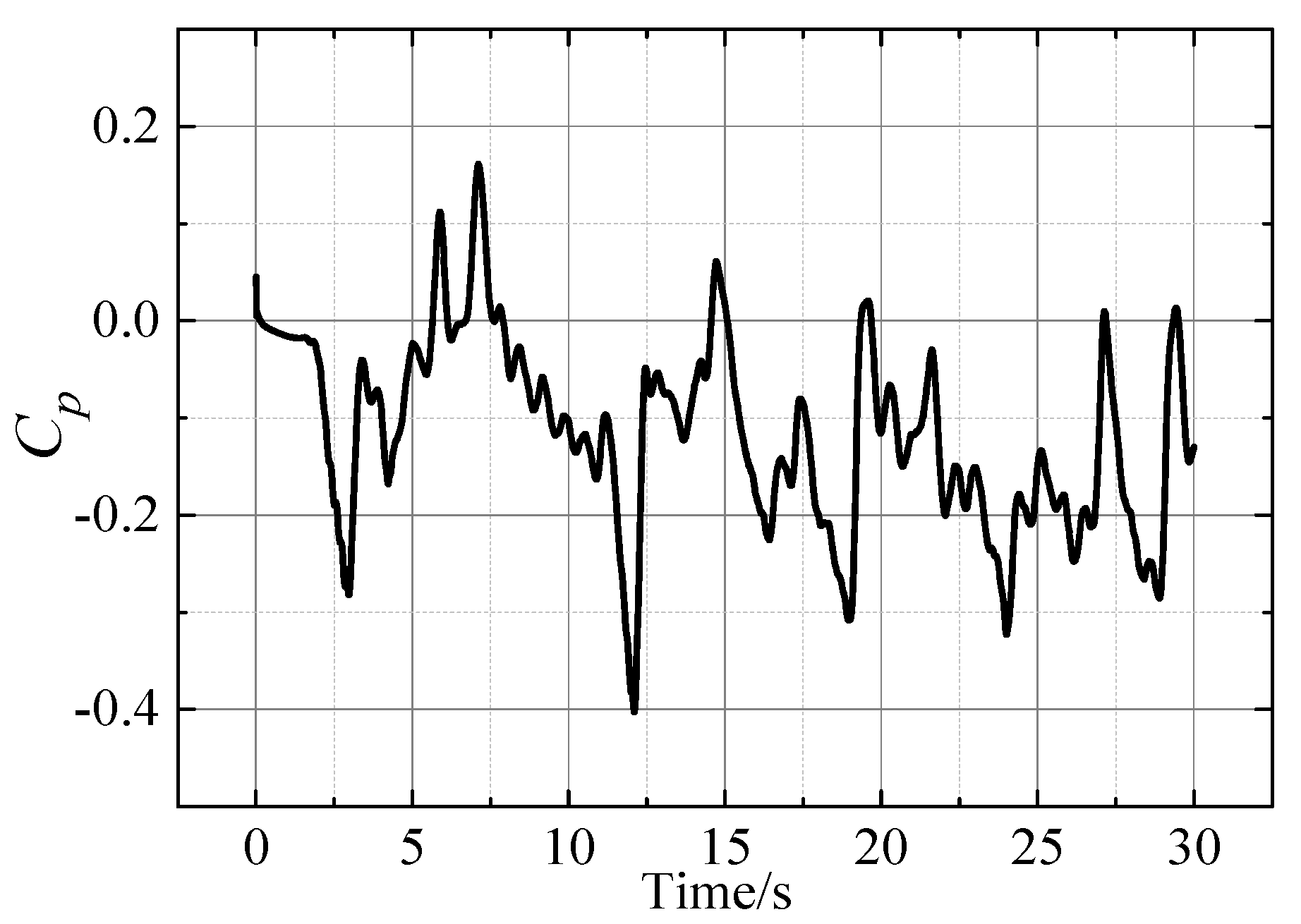
2. Flow Field Signal Acquisition
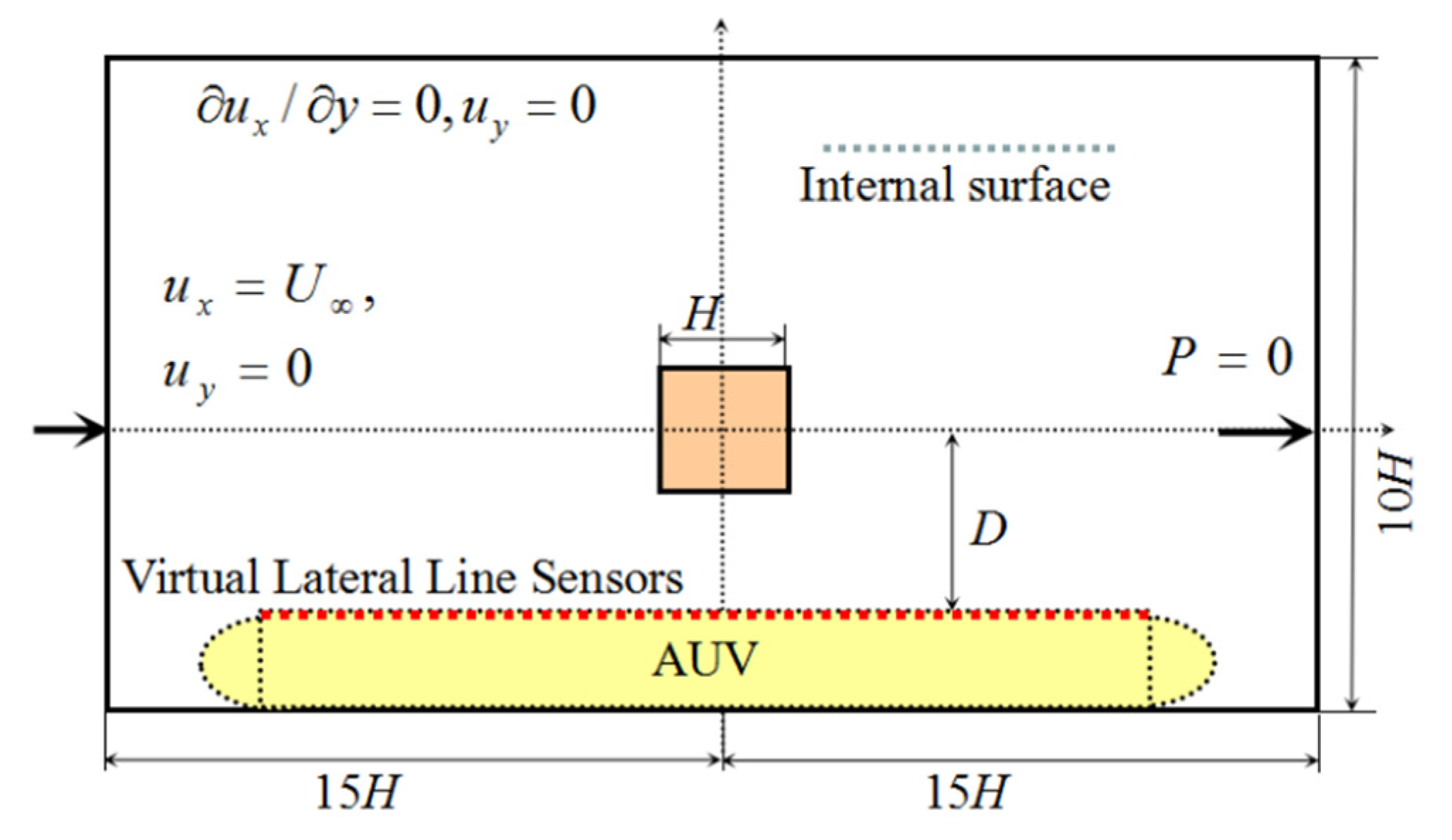
2.1. Numerical Scheme
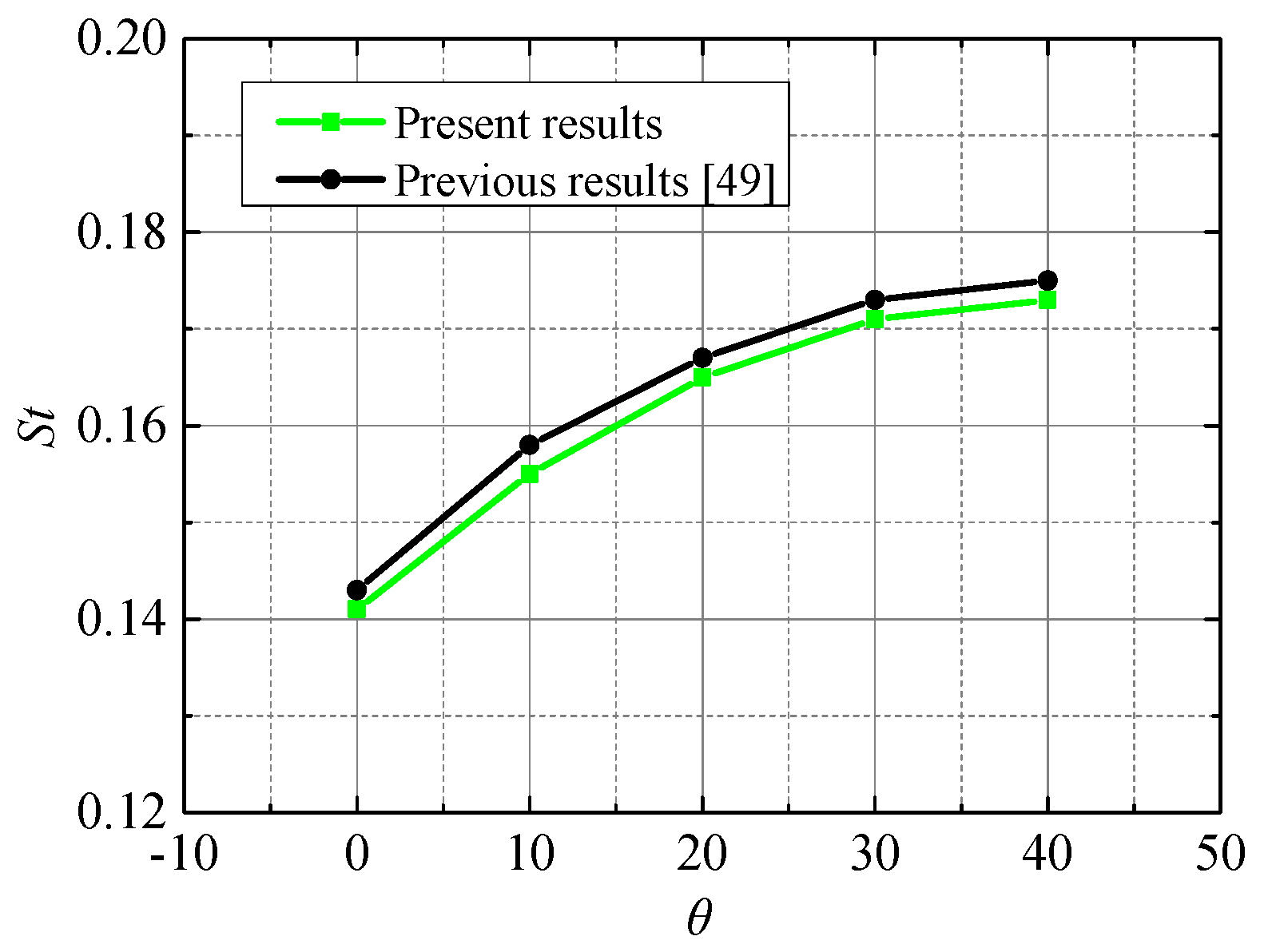
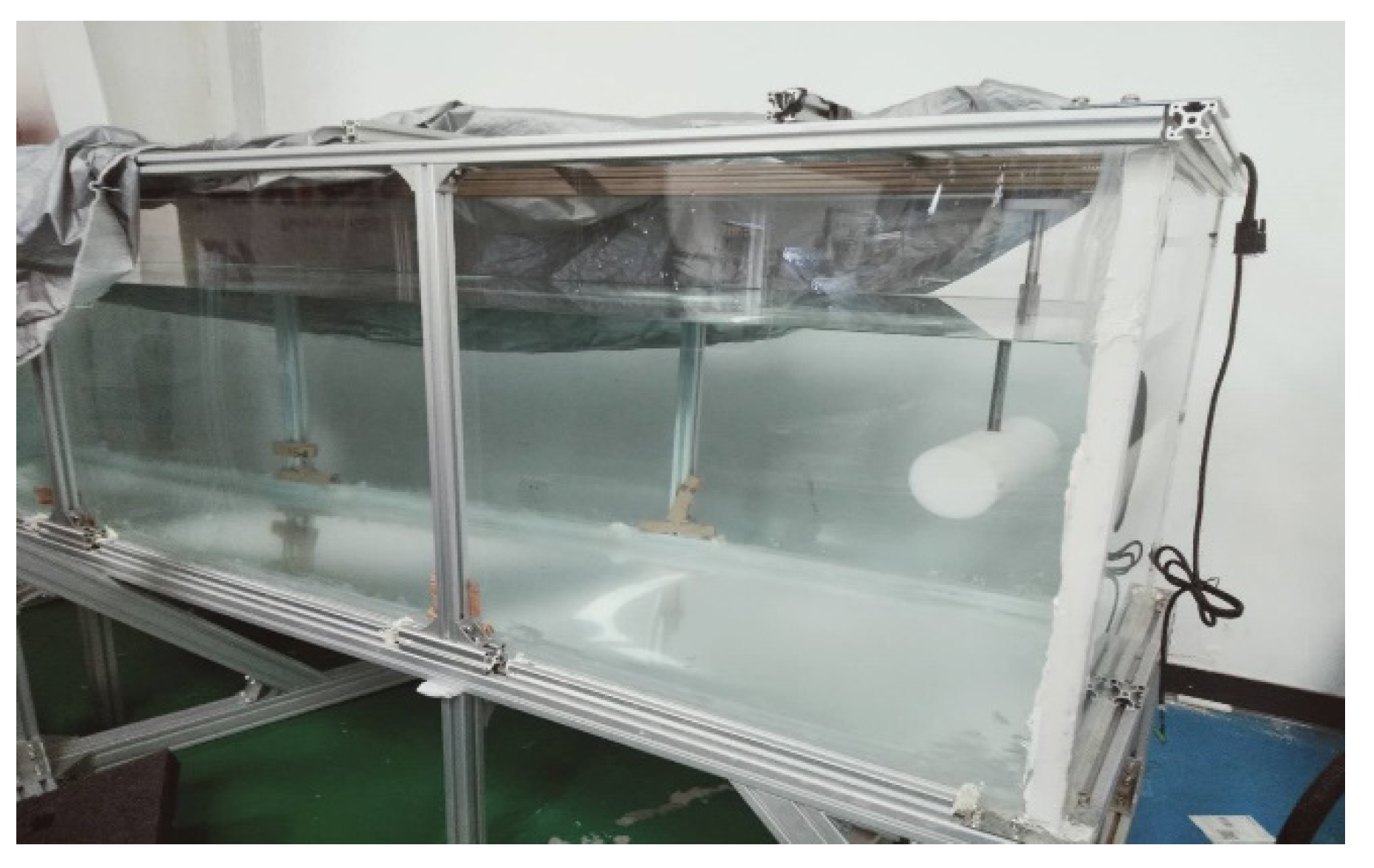
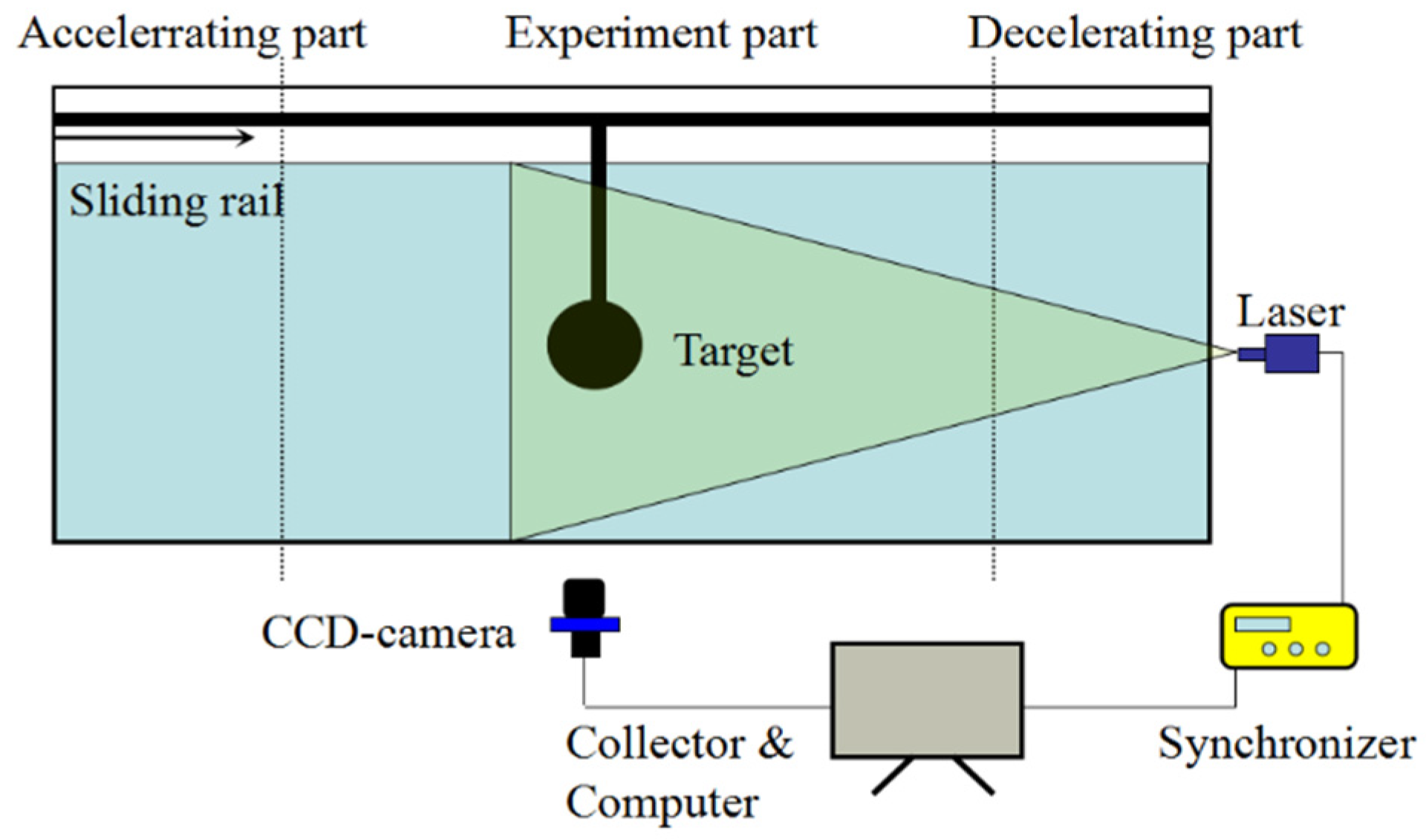
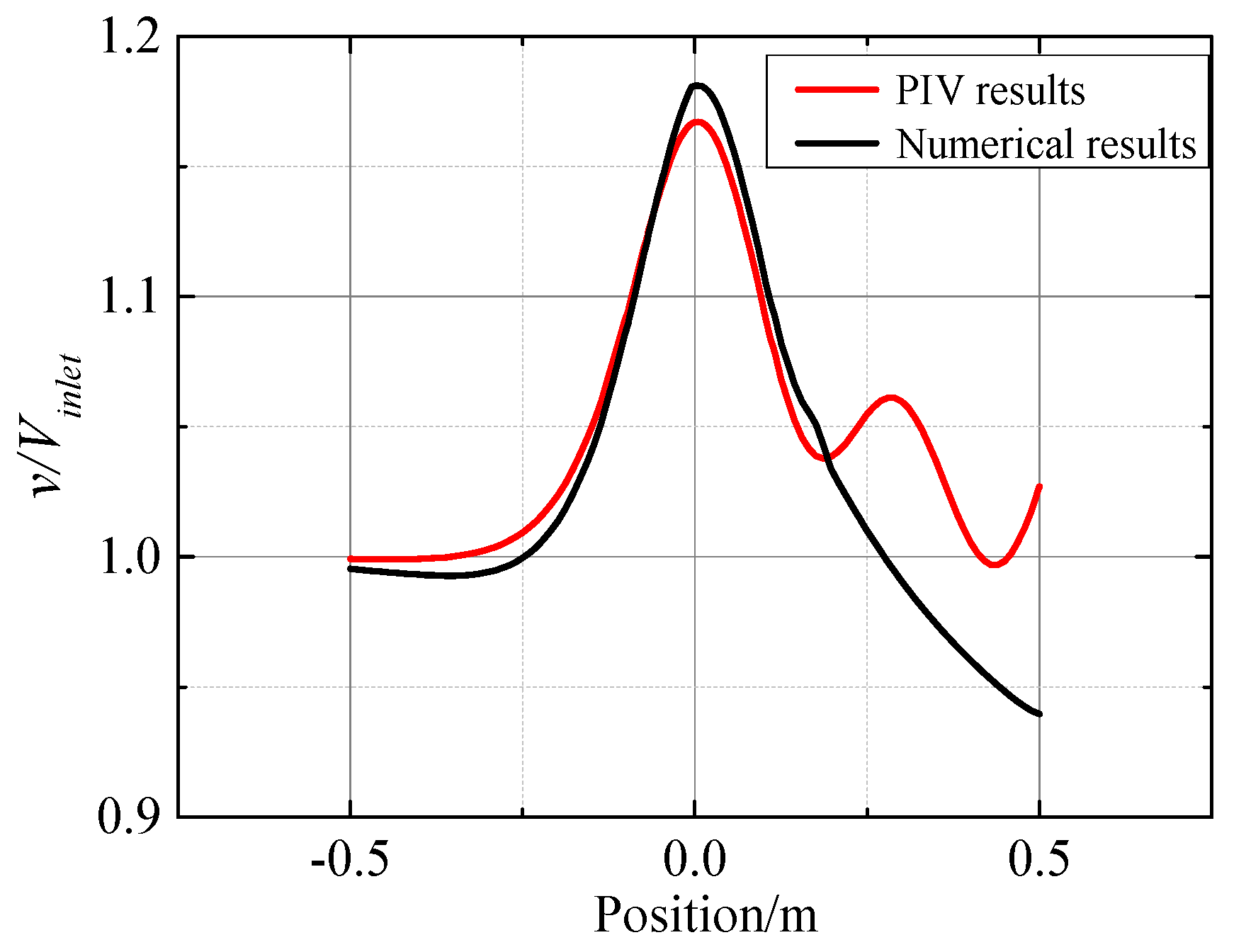
2.2. Numerical Validation by a PIV Experiment
2.3. Phase Space Reconstruction
3. Description of the Pretreatment Method
3.1. Description of the KKF-VSM
- 1.
- Establish a reference system: the known signal series was used to train the KKF-VSM, as the reference system;
- 2.
- Input the test series: the test signal series was normalized by Equation (13), and Equation (14) was used to establish the input signal matrix;where is the processed data, is the original data, and respects the minimum and maximum values of the original signal.
- 3.
- Phase space reconstruction: the input signal matrix was reconstructed in higher phase space, and the signal matrix to the input into the KKF-VSM was obtained;
- 4.
- Sample prediction test: the KKF-VSM was used to obtain the output of the sample series, consisting of the orthonormal kernels and the input signal, as shown in Equation (15). The prediction error was expressed as the mean-square error (MSE), as shown in Equation (16).
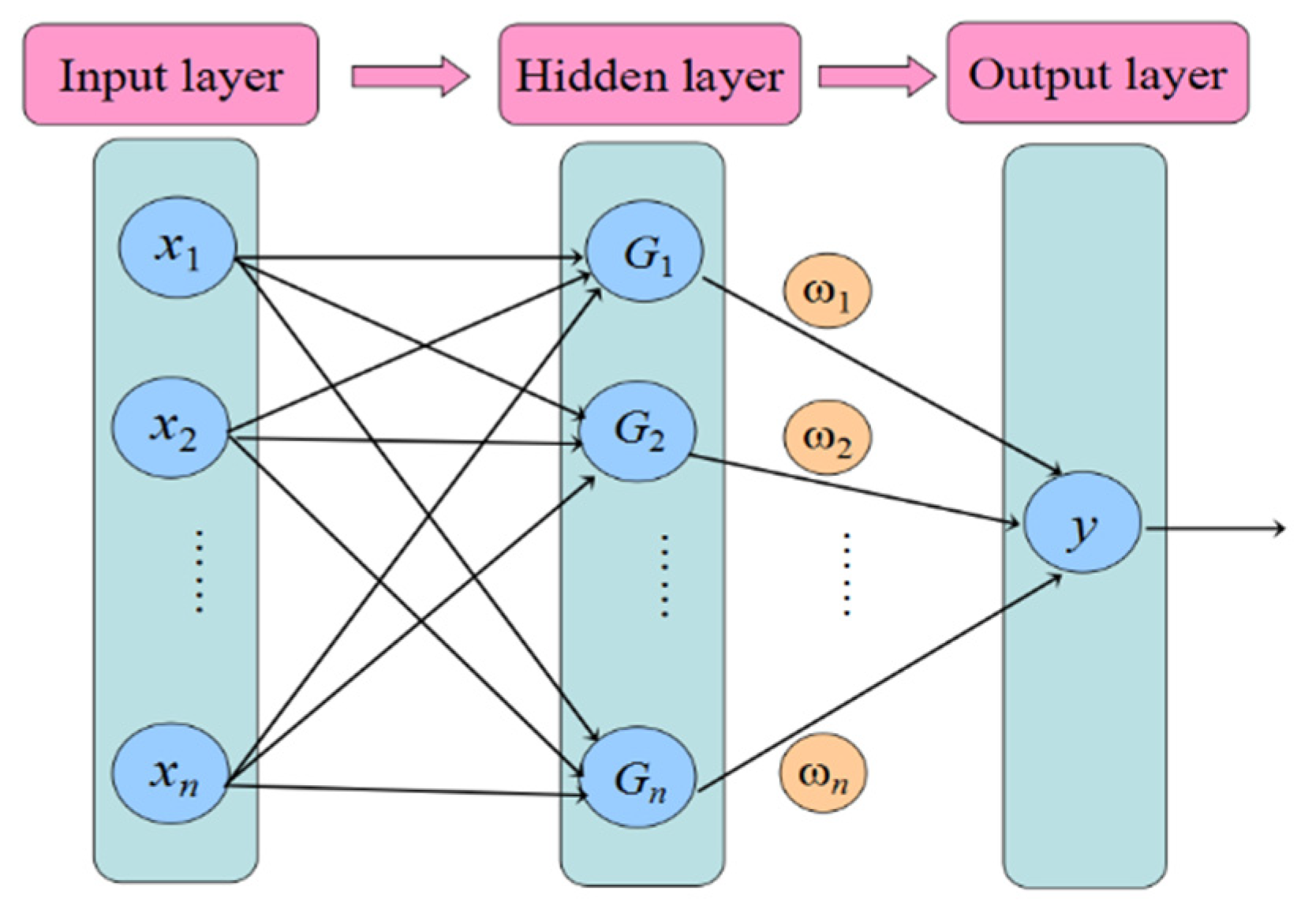
3.2. Description of the RBF-NNM
- 1.
- Determine the cluster center: first, some clustering centers were determined randomly and defined as . The training samples were allocated to each cluster set , based on the principle of minimizing the Euclidean distance between the training samples and the clustering center. The samples average in each set was iterated, and the result was defined as the new cluster center . Repeat the calculation cycle until the residual was less than the setting value and use the final as the cluster center of the basis function;
- 2.
- Determine the width of the hidden node: the maximum was chosen from the cluster center set, and the width of the hidden node can be solved by Equation (19);
- 3.
- Determine the connection weights: the least-square method was used to calculate the weight, as shown in Equation (20).
4. Comparative Analysis Results
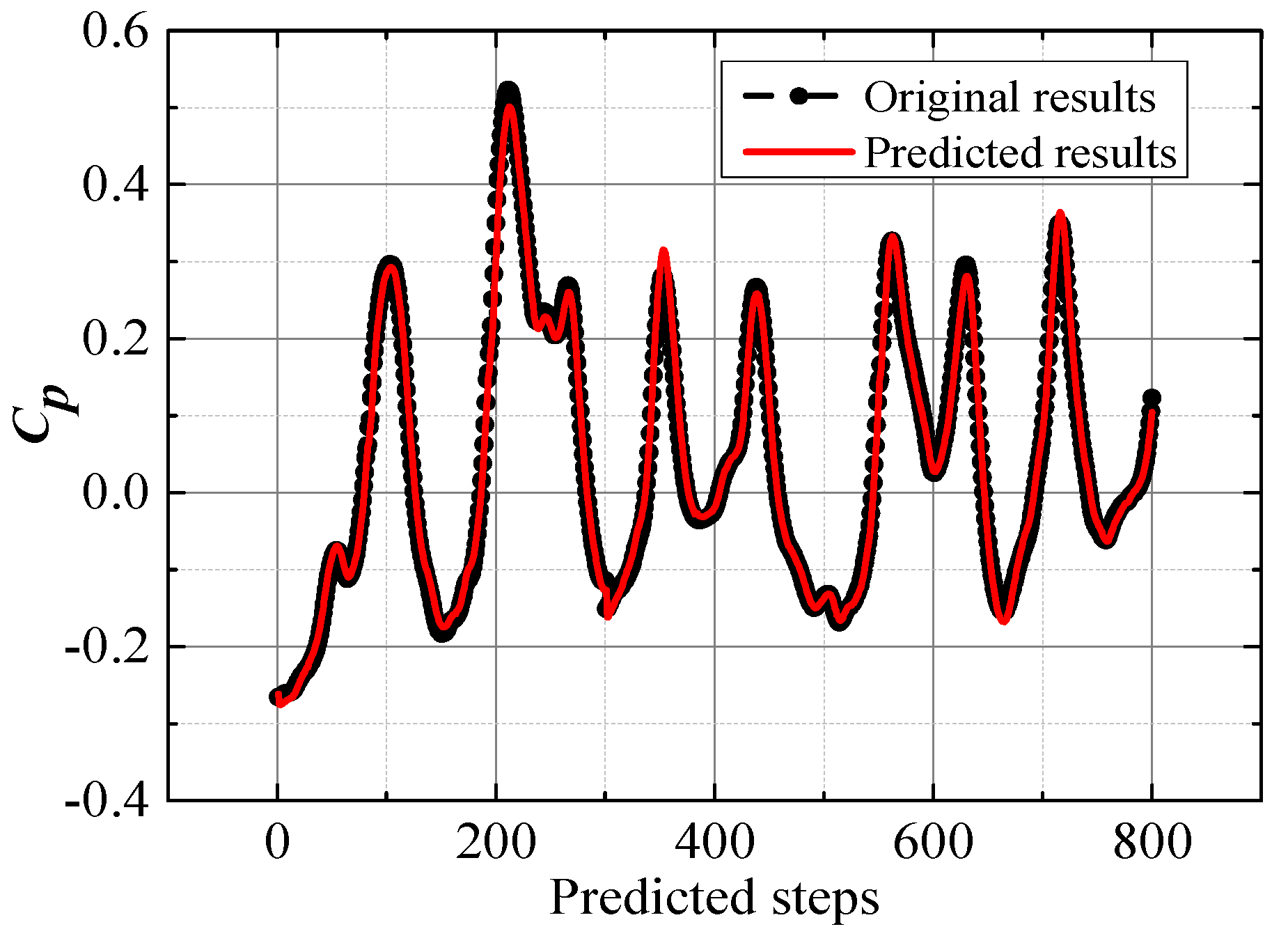
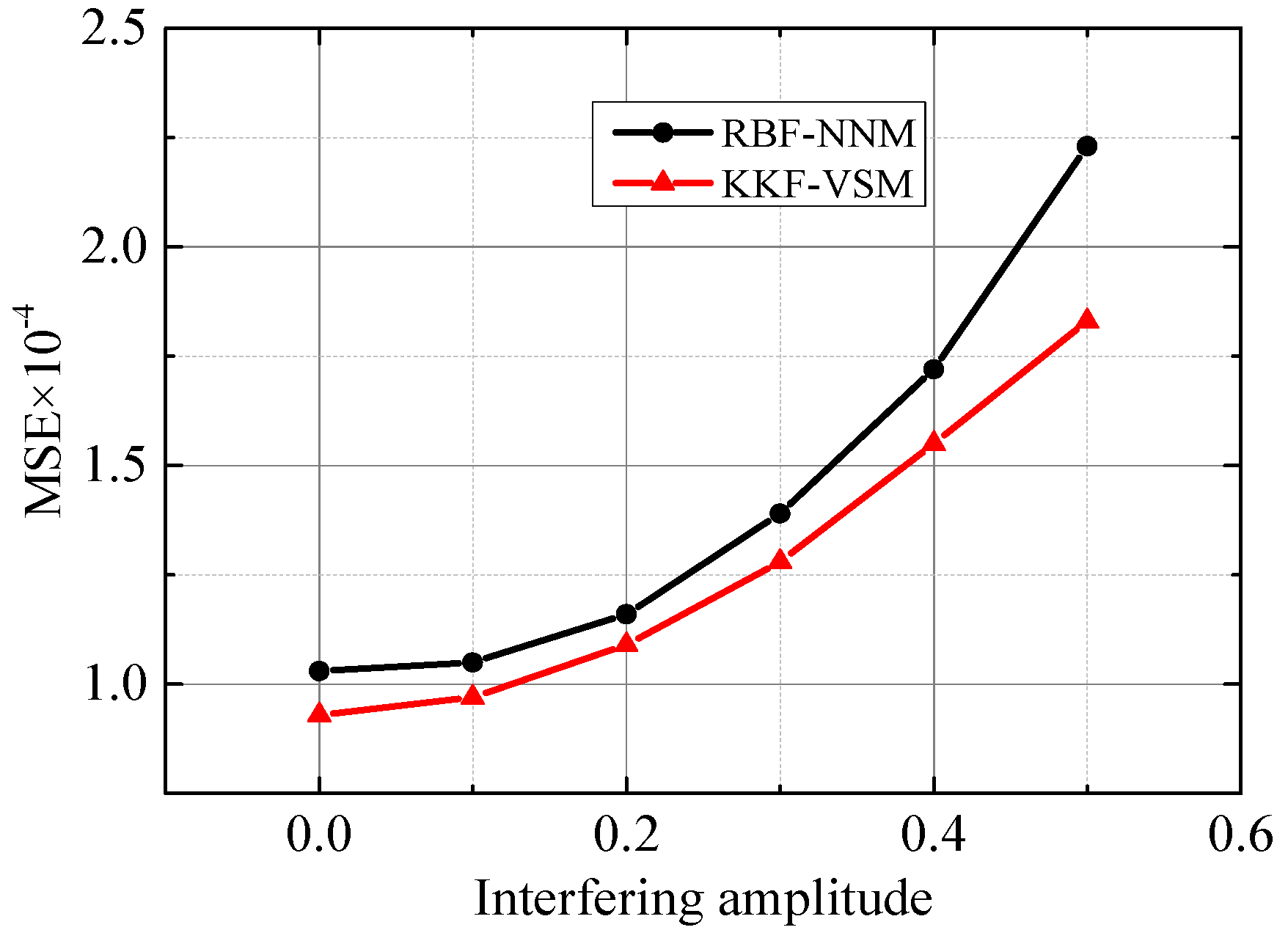
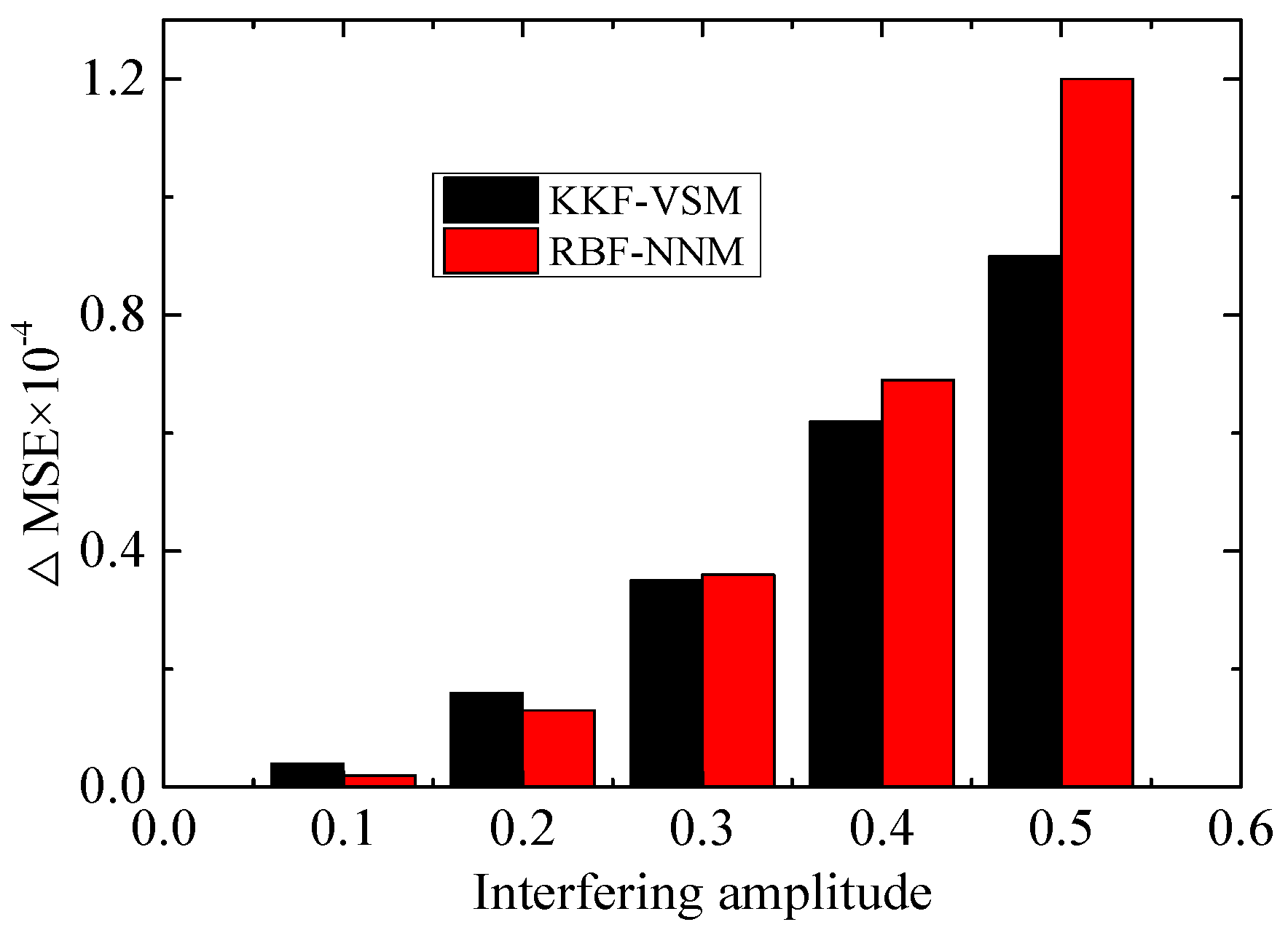
4.1. Analysis of Regular Undesired Signals
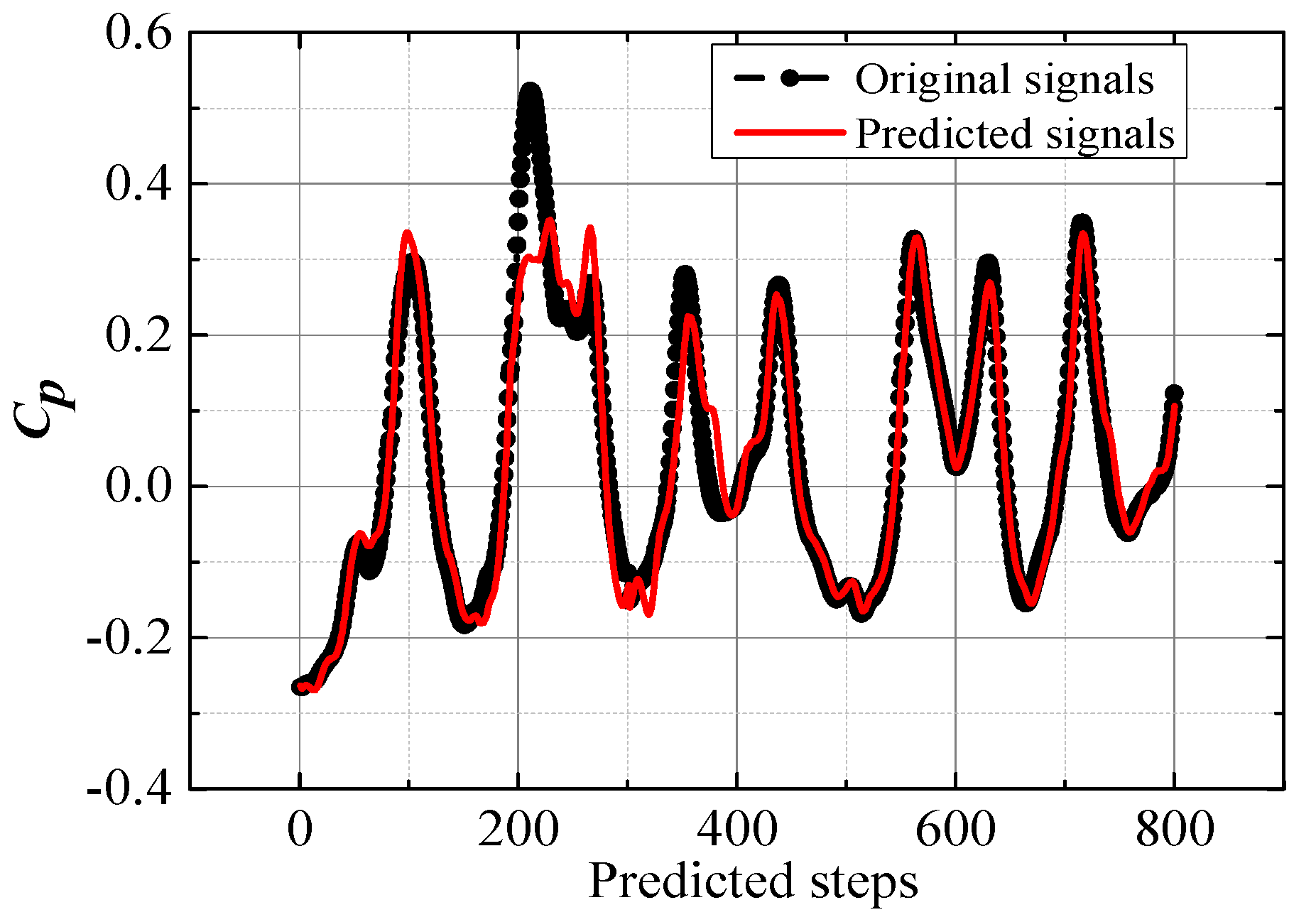
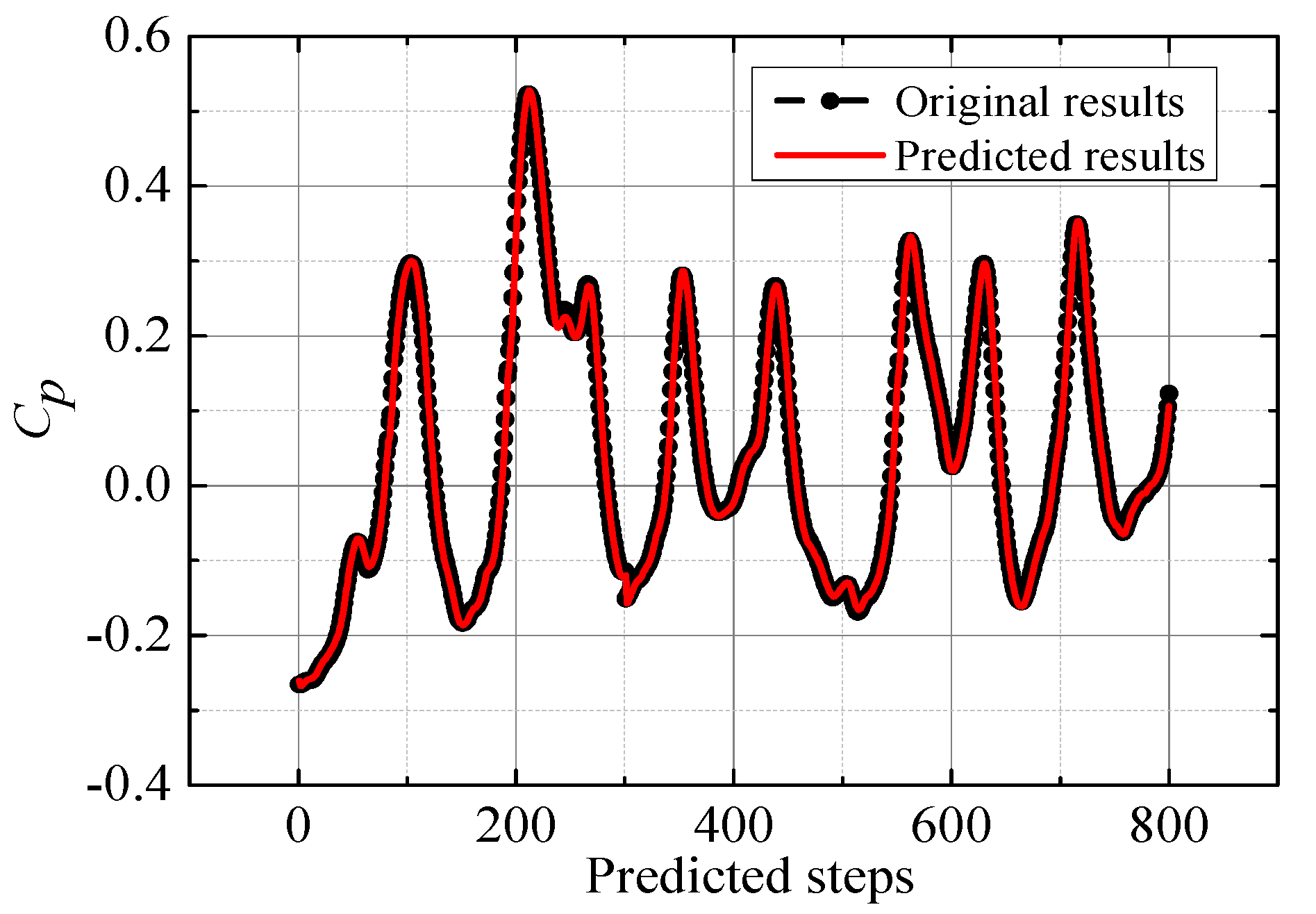
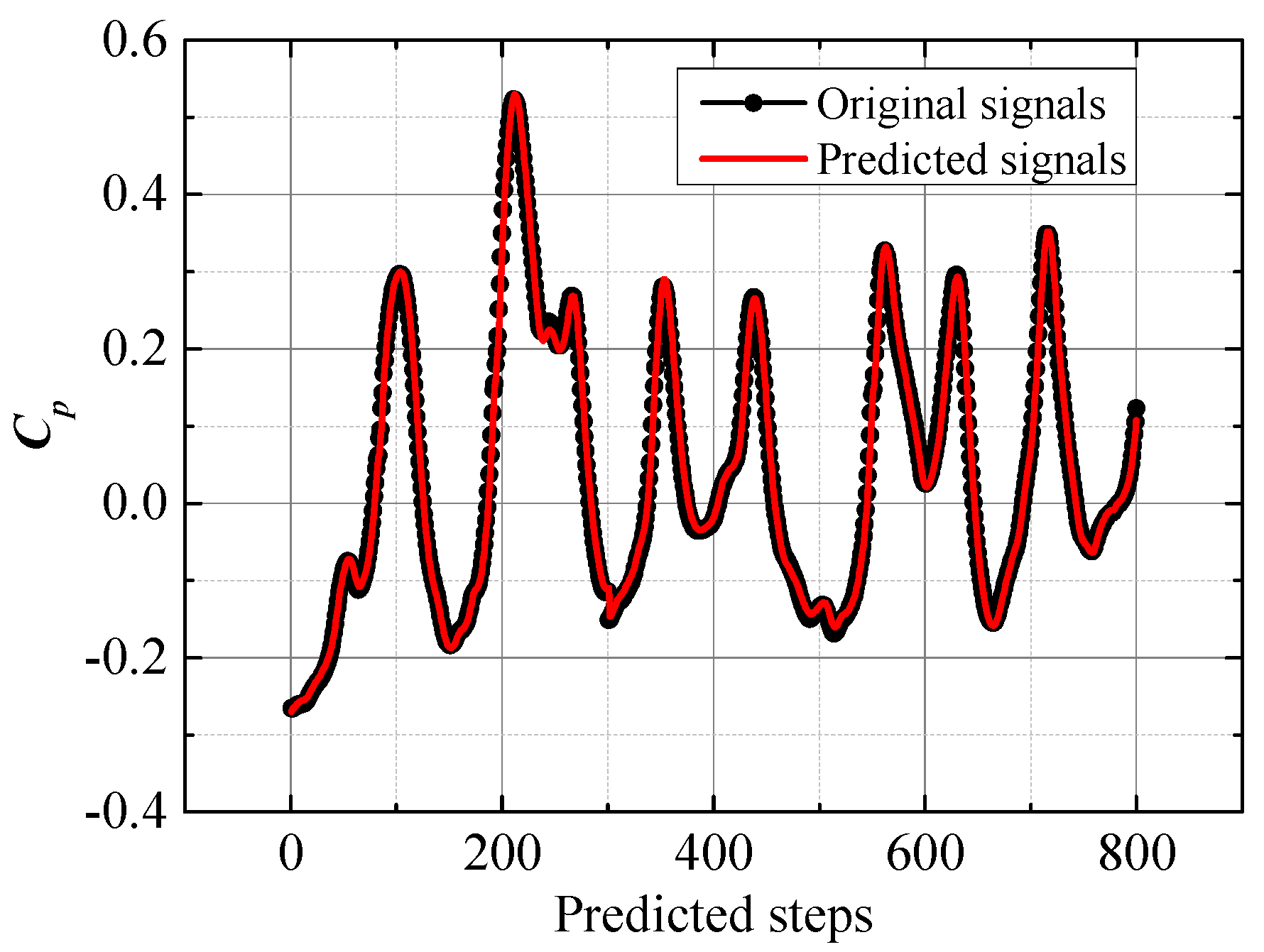
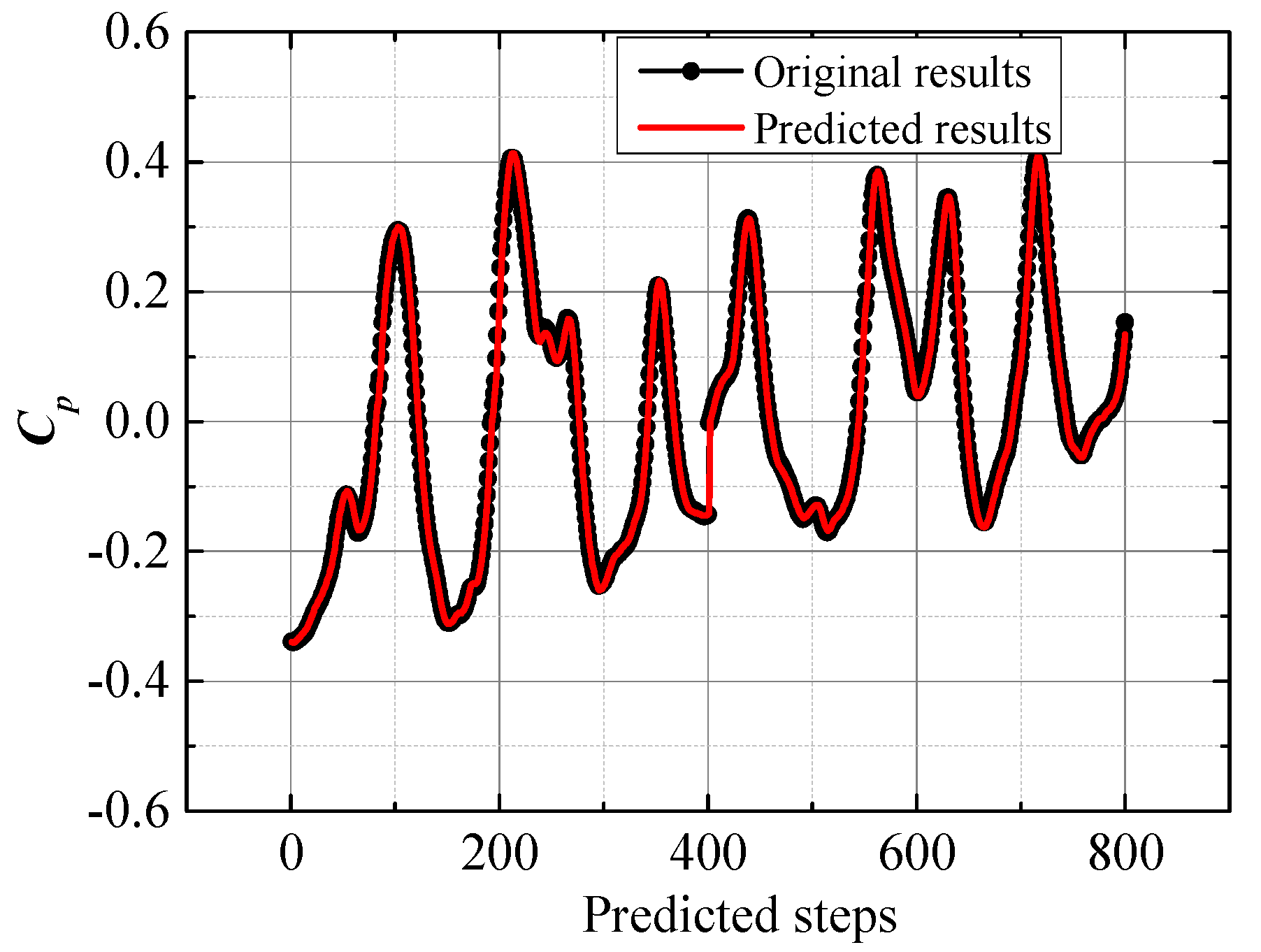
4.2. Analysis of Irregular Undesired Signals
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yu, J.C.; Sun, C.Y.; Zhang, A.Q. The Present Status of Environmental Energy Harvesting and Utilization Technology of Marine Robots. Robot 2018, 40, 89–101. [Google Scholar]
- Feng, X.; Li, Y. Thirty years evolution of SIA’s unmanned marine vehicle. Chin. Sci. Bull. 2013, 58, 2–7. [Google Scholar] [CrossRef]
- Lu, W.; Liu, D. A Frequency-Limited Adaptive Controller for Underwater Vehicle-Manipulator Systems Under Large Wave Disturbances. In Proceedings of the 13th World Congress on Intelligent Control and Automation (WCICA), Changsha, China, 4–8 July 2018. [Google Scholar]
- Sarhadi, P.; Noei, A.R.; Khosravi, A. Model reference adaptive PID control with anti-windup compensator for an autonomous underwater vehicle. Robot. Auton. Syst. 2016, 83, 87–93. [Google Scholar] [CrossRef]
- Rout, R.; Subudhi, B. Inverse optimal self-tuning PID control design for an autonomous underwater vehicle. Int. J. Syst. Sci. 2016, 48, 367–375. [Google Scholar] [CrossRef]
- Santos, C.H.F.; Cildoz, M.U.; Terra, M.H.; Pieri, E.R.D. Backstepping Sliding Mode Control with Functional Tuning Based on an Instantaneous Power Approach Applied to an Underwater Vehicle. Int. J. Syst. Sci. 2018, 49, 859–867. [Google Scholar] [CrossRef]
- Li, J.-H.; Kim, M.-G.; Kang, H.; Lee, M.-J.; Cho, G.R. UUV Simulation Modeling and its Control Method: Simulation and Experimental Studies. J. Mar. Sci. Eng. 2019, 7, 89. [Google Scholar] [CrossRef] [Green Version]
- Teixeira, M.A.S.; Dalmedico, N.; Santos, H.B.; Oliveira, A.S.D.; Arruda, L.V.R.D.; Neves, F. Enhancing Robot Capabilities of Environmental Perception Through Embedded GPU. In Proceedings of the 2017 VII Brazilian Symposium on Computing Systems Engineering (SBESC), Curitiba, Brazil, 6–10 November 2017. [Google Scholar]
- Ferri, G.; Munafo, A.; LePage, K.D. An Autonomous Underwater Vehicle Data-Driven Control Strategy for Target Tracking. IEEE J. Ocean. Eng. 2018, 43, 323–343. [Google Scholar] [CrossRef]
- Huma, G.; Youngtae, N. An Overview of Next-Generation Underwater Target Detection and Tracking: An Integrated Underwater Architecture. IEEE Access 2019, 7, 99. [Google Scholar]
- Emberton, S.; Chittka, L.; Cavallaro, A. Underwater image and video dehazing with pure haze region segmentation. Comput. Vis. Image Underst. 2018, 168, 145–156. [Google Scholar] [CrossRef]
- Li, C.; Guo, J. Underwater image enhancement by dehazing and color correction. J. Electron. Imaging 2015, 24, 033023. [Google Scholar] [CrossRef]
- Zhang, J.X. Principle of Biomimetic Detection Based on Flow Field Information of Underwater Moving Object. Master’s Thesis, Beijing Institute of Technology, Beijing, China, 2015. [Google Scholar]
- Laura, R.; Abbate, F.; Germanà, G.P.; Montalbano, G.; Germana, A.; Levanti, M. Fine structure of the canal neuromasts of the lateral line system in the adult zebrafish. Anat. Histol. Embryol. 2018, 47, 322–329. [Google Scholar] [CrossRef]
- Abbate, F.; Madrigrano, M.; Scopitteri, T.; Levanti, M.; Cobo, J.; Germanà, A.; Vega, J.; Laurà, R. Acid-sensing ion channel immunoreactivities in the cephalic neuromasts of adult zebrafish. Ann. Anat. 2016, 207, 27–31. [Google Scholar] [CrossRef]
- Baxendale, S.; Whitfield, T. Methods to study the development, anatomy, and function of the zebrafish inner ear across the life course. Methods Cell Biol. 2016, 134, 165–209. [Google Scholar] [CrossRef] [PubMed]
- Jiang, Y.; Fu, J.; Zhang, D.; Zhao, Y. Investigation on the lateral line systems of two cavefish: Sinocyclocheilus Macrophthalmus and Microphthalmus (Cypriniformes: Cyprinidae). J. Bionic Eng. 2016, 13, 108–114. [Google Scholar] [CrossRef]
- Becker, E.A.; Bird, N.C.; Webb, J.F. Post-embryonic development of canal and superficial neuromasts and the generation of two cranial lateral line phenotypes. J. Morphol. 2016, 277, 1273–1291. [Google Scholar] [CrossRef]
- Angelo, D.L.; Lossi, L.; Merighi, A.; Girolamo, P.D. Anatomical Features for the Adequate Choice of Experimental Animal Models in Biomedicine: I. Fishes. Ann. Anat. 2016, 205, 75–84. [Google Scholar] [PubMed]
- Cruz, I.A.; Kappedal, R.; Mackenzie, S.M.; Hailey, D.W.; Hoffman, T.L.; Schilling, T.F.; Raible, D.W. Robust regeneration of adult zebrafish lateral line hair cells reflects continued precursor pool maintenance. Dev. Biol. 2015, 402, 229–238. [Google Scholar] [CrossRef] [Green Version]
- Butler, J.M.; Maruska, K.P. The mechanosensory lateral line is used to assess opponents and mediate aggressive behaviors during territorial interactions in an African cichlid fish. J. Exp. Biol. 2015, 218, 3284–3294. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yoshizawa, M.; Jeffery, W.R.; van Netten, S.M.; McHenry, M.J. The sensitivity of lateral line receptors and their role in the behavior of Mexican blind cavefish (Astyanax mexicanus). J. Exp. Biol. 2013, 217, 886–895. [Google Scholar] [CrossRef] [Green Version]
- Abdulsadda, A.; Tan, X. An artificial lateral line system using IPMC sensor arrays. Int. J. Smart Nano Mater. 2012, 3, 226–242. [Google Scholar] [CrossRef] [Green Version]
- Reida, A.; Windmilla, J.F.C.; Uttamchandani, D. Bio-inspired Sound Localization Sensor with High Directional Sensitivity. Procedia Eng. 2015, 120, 289–293. [Google Scholar] [CrossRef] [Green Version]
- Soize, C. Uncertainty Quantification: An Accelerated Course with Advanced Applications in Computational Engineering; Springer: Berlin, Germany, 2017. [Google Scholar]
- AlSuwaidi, A.; Grieve, B.; Yin, H. Feature-Ensemble-Based Novelty Detection for Analyzing Plant Hyperspectral Datasets. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2018, 11, 1041–1055. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Chen, K.; Lixue, Y.; Kean, C. Performance Comparison of Two Types of Auditory Perceptual Features in Robust Underwater Target Classification. Acta Acust. United Acust. 2017, 103, 56–66. [Google Scholar] [CrossRef]
- Biswas, A.; Biswas, B. Analyzing evolutionary optimization and community detection algorithms using regression line dominance. Inf. Sci. 2017, 396, 185–201. [Google Scholar] [CrossRef]
- Aung, Y.Y.; Min, M.M. Hybrid Intrusion Detection System Using K-Means and Classification and Regression Trees Algorithms. In Proceedings of the 2018 IEEE 16th International Conference on Software Engineering Research, Management and Applications (SERA), Kunming, China, 13–15 June 2018. [Google Scholar]
- El-Moursy, A.A.; Abdelsamea, A.; Kamran, R.; Saad, M. Multi-Dimensional Regression Host Utilization algorithm (MDRHU) for Host Overload Detection in Cloud Computing. J. Cloud Comput. 2019, 8, 1–17. [Google Scholar] [CrossRef]
- Mirgolbabaei, H. Low-Dimensional Manifold Simulation of Turbulent Reacting Flows Using Linear and Nonlinear Principal Components Analysis. Master’s Thesis, North Carolina State University, Raleigh, NC, USA, 2014. [Google Scholar]
- Clifton, D.A.; Hugueny, S.; Tarassenko, L. Novelty Detection with Multivariate Extreme Value Statistics. J. Signal Process. Syst. 2010, 65, 371–389. [Google Scholar] [CrossRef]
- Schendel, T.; Thongwichian, R. Confidence intervals for return levels for the peaks-over-threshold approach. Adv. Water Resour. 2016, 99, 53–59. [Google Scholar] [CrossRef]
- Ling, J.; Templeton, J. Evaluation of machine learning algorithms for prediction of regions of high Reynolds averaged Navier Stokes uncertainty. Phys. Fluids 2015, 27, 085103. [Google Scholar] [CrossRef]
- Valero, D.; Bung, D. Artificial Neural Networks and pattern recognition for air-water flow velocity estimation using a single-tip optical fibre probe. J. Hydro Environ. Res. 2018, 19, 150–159. [Google Scholar] [CrossRef]
- Jiang, X.L.; Tang, Z.Y.; Wang, R.H. A novel cooperative spectrum signal detection algorithm for underwater communication system. EURASIP J. Wirel. Comm. 2019, 2019, 232. [Google Scholar]
- Wu, J.-L.; Wang, J.-X.; Xiao, H.; Ling, J. A Priori Assessment of Prediction Confidence for Data-Driven Turbulence Modeling. Flow Turbul. Combust. 2017, 99, 25–46. [Google Scholar] [CrossRef]
- Khalid, M.S.U.; Akhtar, I.; Dong, H.; Ahsan, N.; Jiang, X.; Wu, B. Bifurcations and route to chaos for flow over an oscillating airfoil. J. Fluids Struct. 2018, 80, 262–274. [Google Scholar] [CrossRef] [Green Version]
- Lin, W.; Zhao, J.-L. A Novel Method Based on Hilbert Transform for Signal Processing of Coriolis Mass Flowmeter. Int. J. Pattern Recognit. Artif. Intell. 2017, 32, 1858001. [Google Scholar] [CrossRef]
- Yooil, K. Prediction of the dynamic response of a slender marine structure under an irregular ocean wave using the NARX-Based quadratic Volterra Series. Appl. Ocean Res. 2015, 49, 42–56. [Google Scholar]
- Tong, W.G.; Yang, Y.Q.; Jin, X.Z. Study on soft-sensing model of the gas flow rate measurement based on RBF neural network. Proc. CSEE 2006, 26, 66–69. [Google Scholar]
- Zhou, J.N.; Li, Y.A.; Wu, Y.S. Prediction of underwater acoustic signals based on neural network. Tech. Acoustic. 2006, 25, 226–229. [Google Scholar]
- Yu, X.B.; He, W.; Xue, C.Q.; Sun, Y.K.; Sun, C.Y. Disturbance observer-based adaptive network tracking control for robots. Acta. Automatica. Sci. 2019, 45, 1307–1323. [Google Scholar]
- Tiao, W.-C. Practical approach to investigate the statistics of nonlinear pressure on a high-speed ship by using the Volterra model. Ocean Eng. 2010, 37, 847–857. [Google Scholar] [CrossRef]
- Yetkin, M.; Kim, Y. Time series prediction of mooring line top tension by the NARX and Volterra model. Appl. Ocean Res. 2019, 88, 170–186. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, J.H.; Kim, Y. Time series prediction of nonlinear ship structural responses in irregular seaways using a third-order Volterra model. J. Fluid Struct. 2014, 49, 322–337. [Google Scholar] [CrossRef]
- Lin, X.; Wu, J.; Qin, Q. Robust Classification Method for Underwater Targets Using the Chaotic Features of the Flow Field. J. Mar. Sci. Eng. 2020, 8, 111. [Google Scholar] [CrossRef] [Green Version]
- Bao, Y.; Zhou, D.; Zhao, Y.-J. A two-step Taylor-characteristic-based Galerkin method for incompressible flows and its application to flow over triangular cylinder with different incidence angles. Int. J. Numer. Methods Fluids 2009, 62, 1181–1208. [Google Scholar] [CrossRef]
- Zhao, X.Z.; Cheng, D.; Zhang, D.K.; Hu, Z. Numerical study of low-Reynolds-number flow past two tandem square cylinders with varying incident angles of the downstream one using a CIP-Based mode. Ocean. Eng. 2016, 121, 414–421. [Google Scholar] [CrossRef]
- Luis, G.G.V.; Samuel, D.S.; Americo, C.J. Damage detection in uncertain nonlinear systems based on stochastic Volterra series. Mech. Syst. Signal Pr. 2019, 125, 288–310. [Google Scholar]
- Da Rosa, A.; Campello, R.J.G.B.; Amaral, W.C. Choice of free parameters in expansions of discrete-time Volterra models using Kautz functions. Automatica 2007, 43, 1084–1091. [Google Scholar] [CrossRef]
- Wahlberg, B. System identification using Kautz models. IEEE Trans. Autom. Control. 1994, 39, 1276–1282. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sampling Frequency/Hz | Sample Number | Laser Energy/mJ | Velocity Vector Number |
|---|---|---|---|
| 100 | 300 | 100 | 256 |
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | |
|---|---|---|---|---|---|
| 1.94 | 2.43 | 3.17 | 4.29 | 5.87 | |
| 1.46 | 1.77 | 2.27 | 2.97 | 3.84 | |
| 0.97 | 1.09 | 1.28 | 1.55 | 1.83 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, X.; Qin, Q.; Wang, X.; Zhang, J. Robust Flow Field Signal Estimation Method for Flow Sensing by Underwater Robotics. Appl. Sci. 2021, 11, 7759. https://doi.org/10.3390/app11167759
Lin X, Qin Q, Wang X, Zhang J. Robust Flow Field Signal Estimation Method for Flow Sensing by Underwater Robotics. Applied Sciences. 2021; 11(16):7759. https://doi.org/10.3390/app11167759
Chicago/Turabian StyleLin, Xinghua, Qing Qin, Xiaoming Wang, and Junxia Zhang. 2021. "Robust Flow Field Signal Estimation Method for Flow Sensing by Underwater Robotics" Applied Sciences 11, no. 16: 7759. https://doi.org/10.3390/app11167759