
Design and Experimental Evaluation of an Electrorheological Haptic Module with Embedded Sensing


Abstract
:1. Introduction
2. Design and Characterization of the Haptic Module
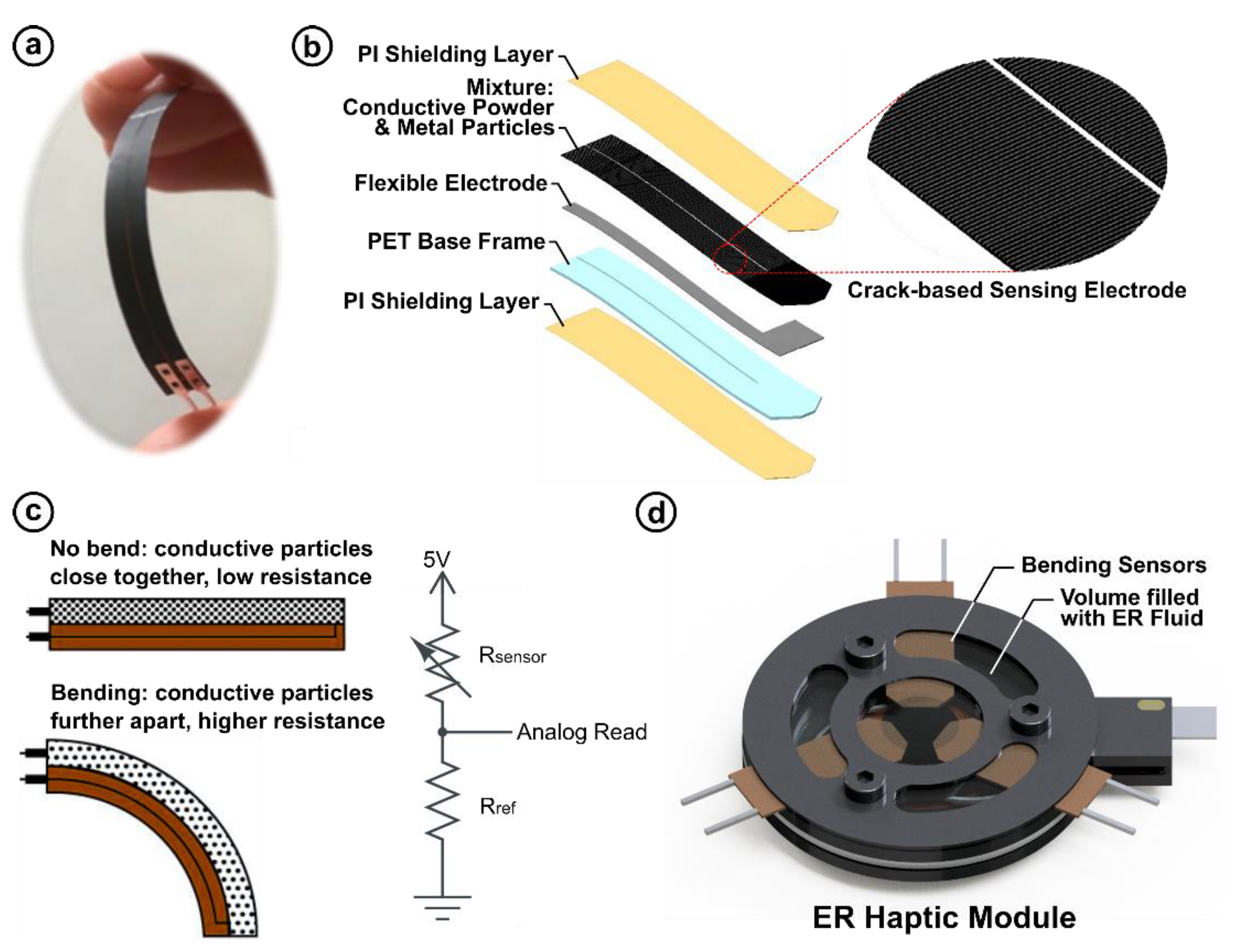
2.1. Design and Working Principle of Miniature ER Actuator
2.2. Working Principle and Implementation of the Bending Sensor
3. Evaluation of the Haptic Module
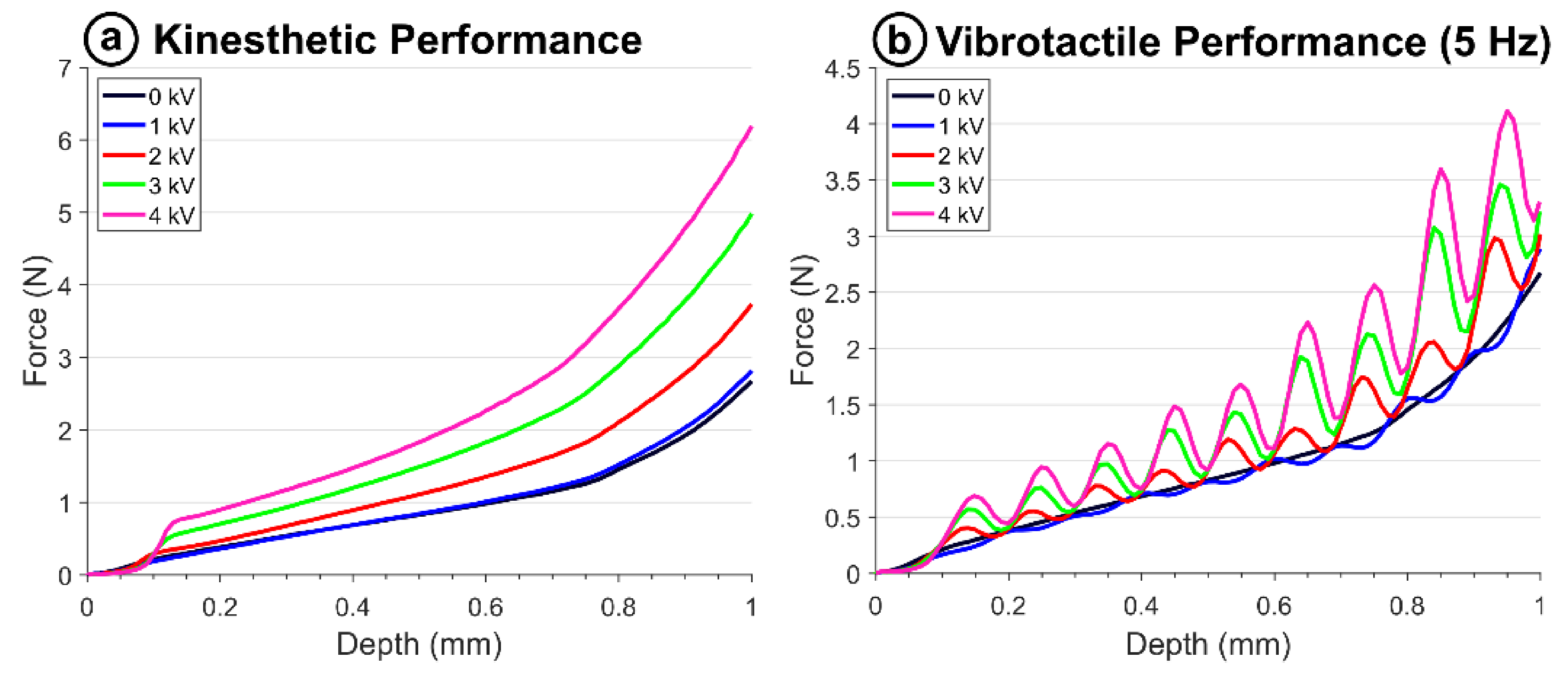
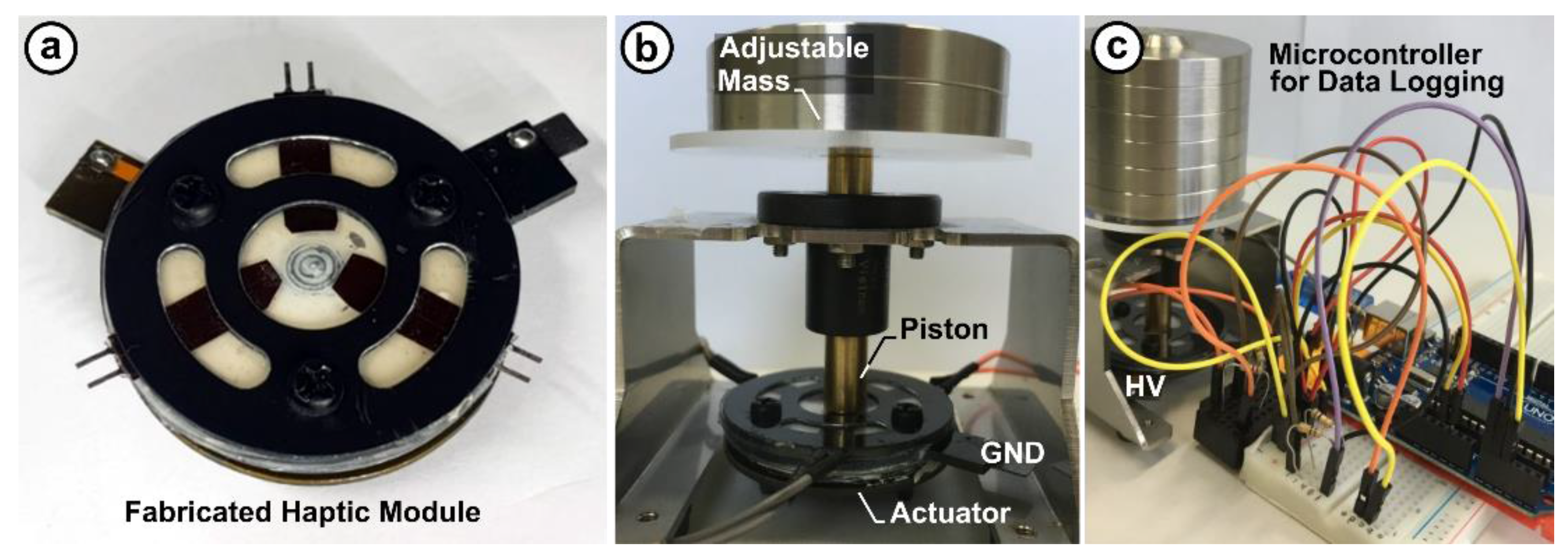
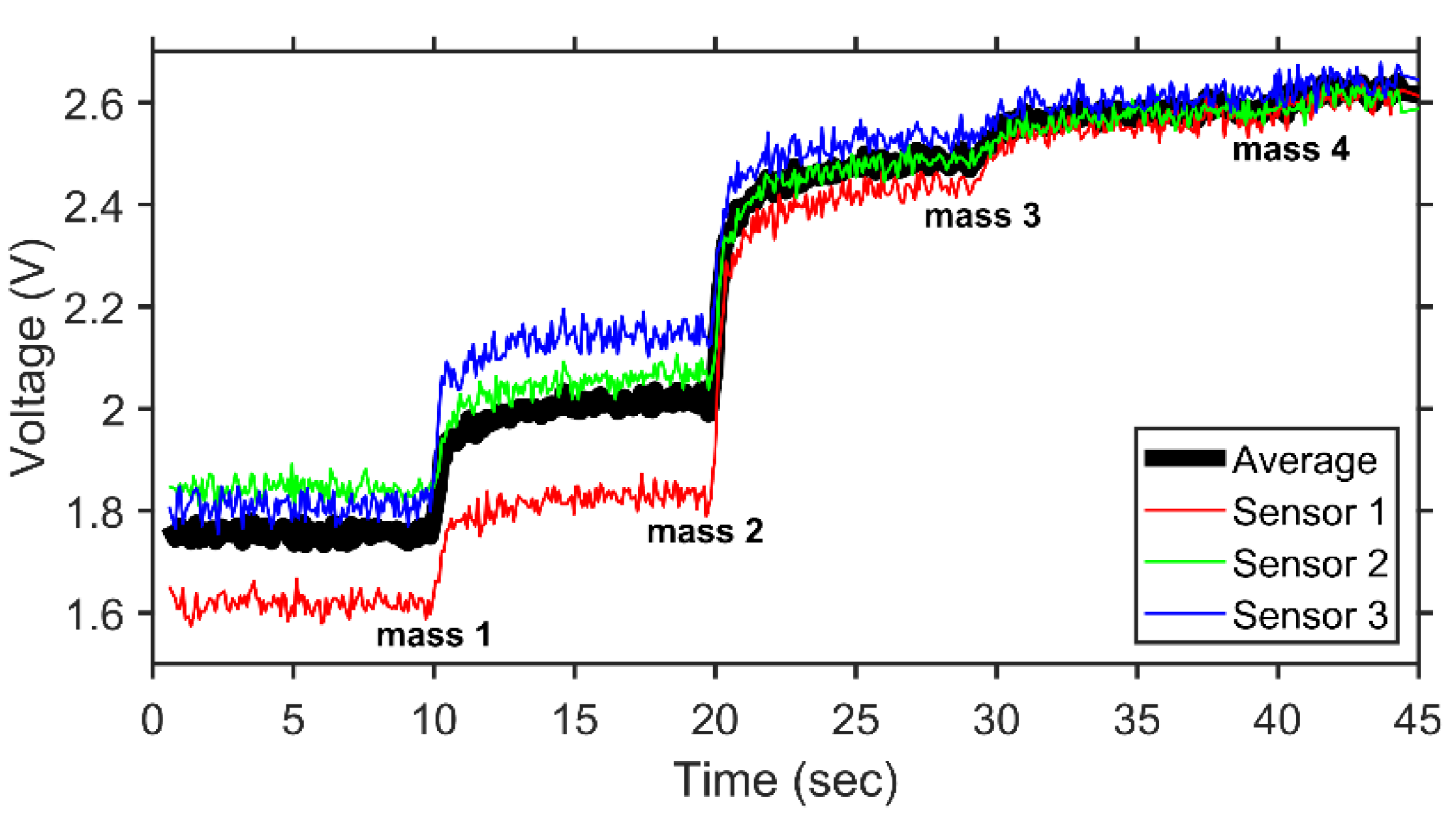
3.1. Static Testing
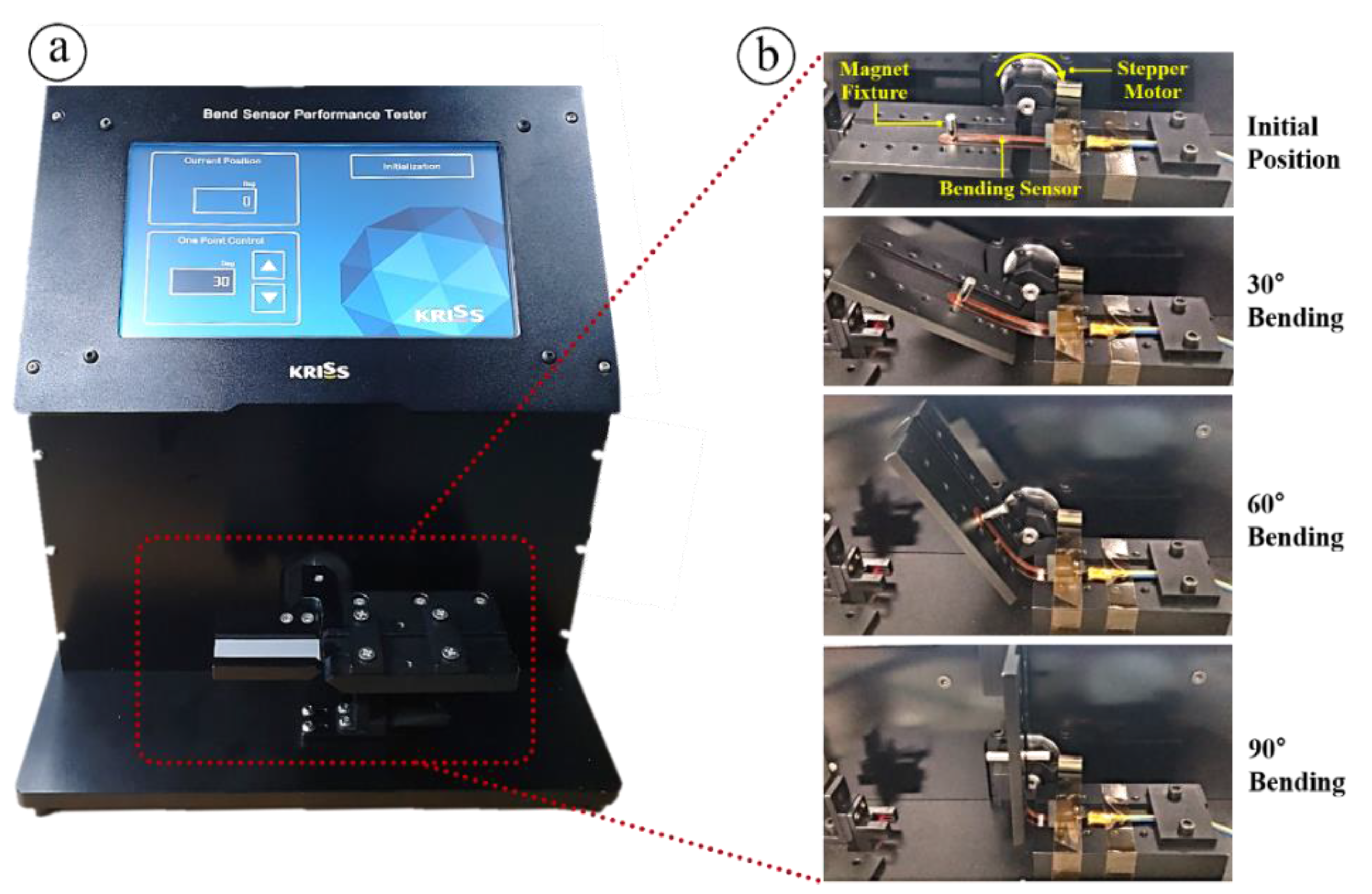
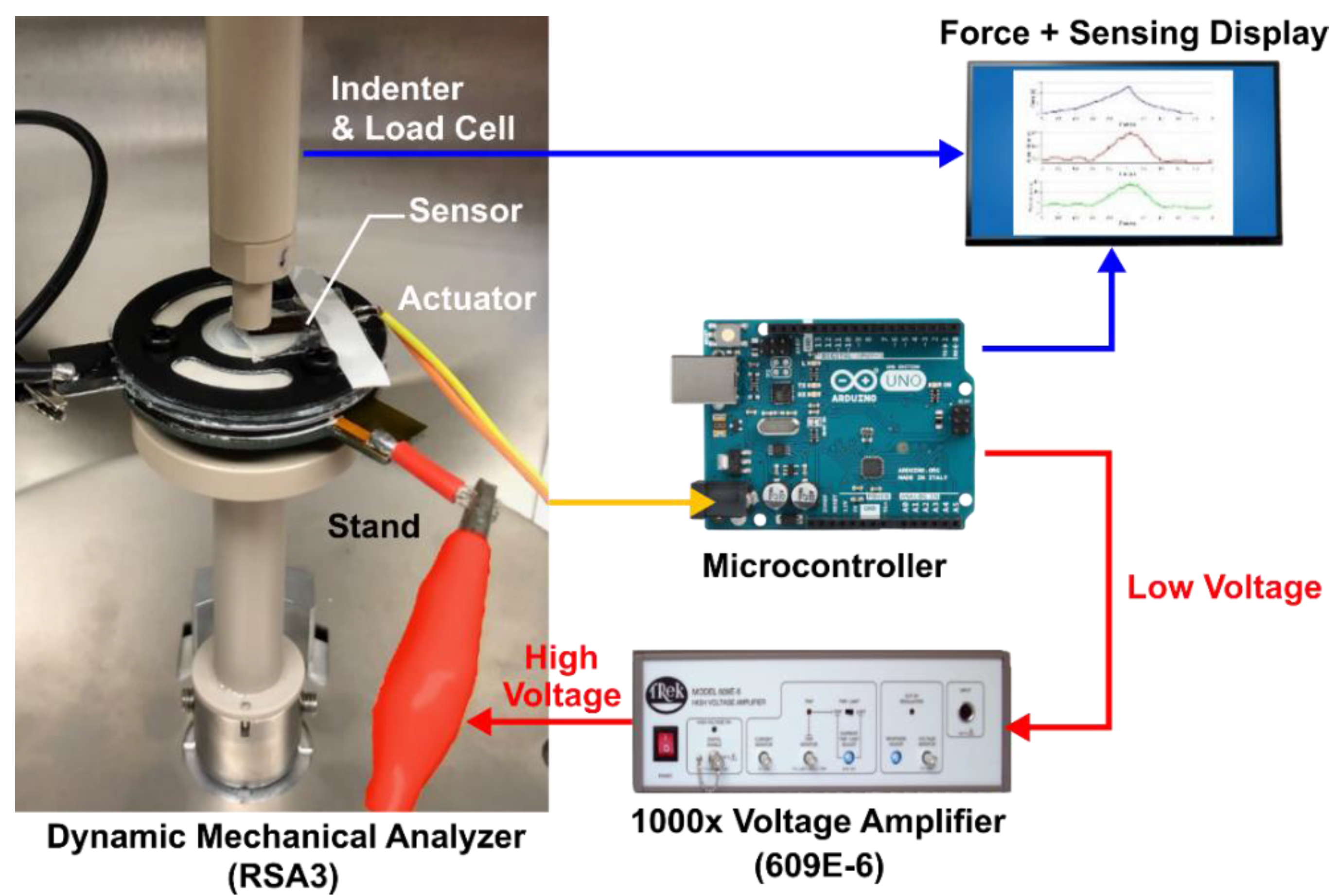
3.2. Dynamic Testing: Experimental Setup
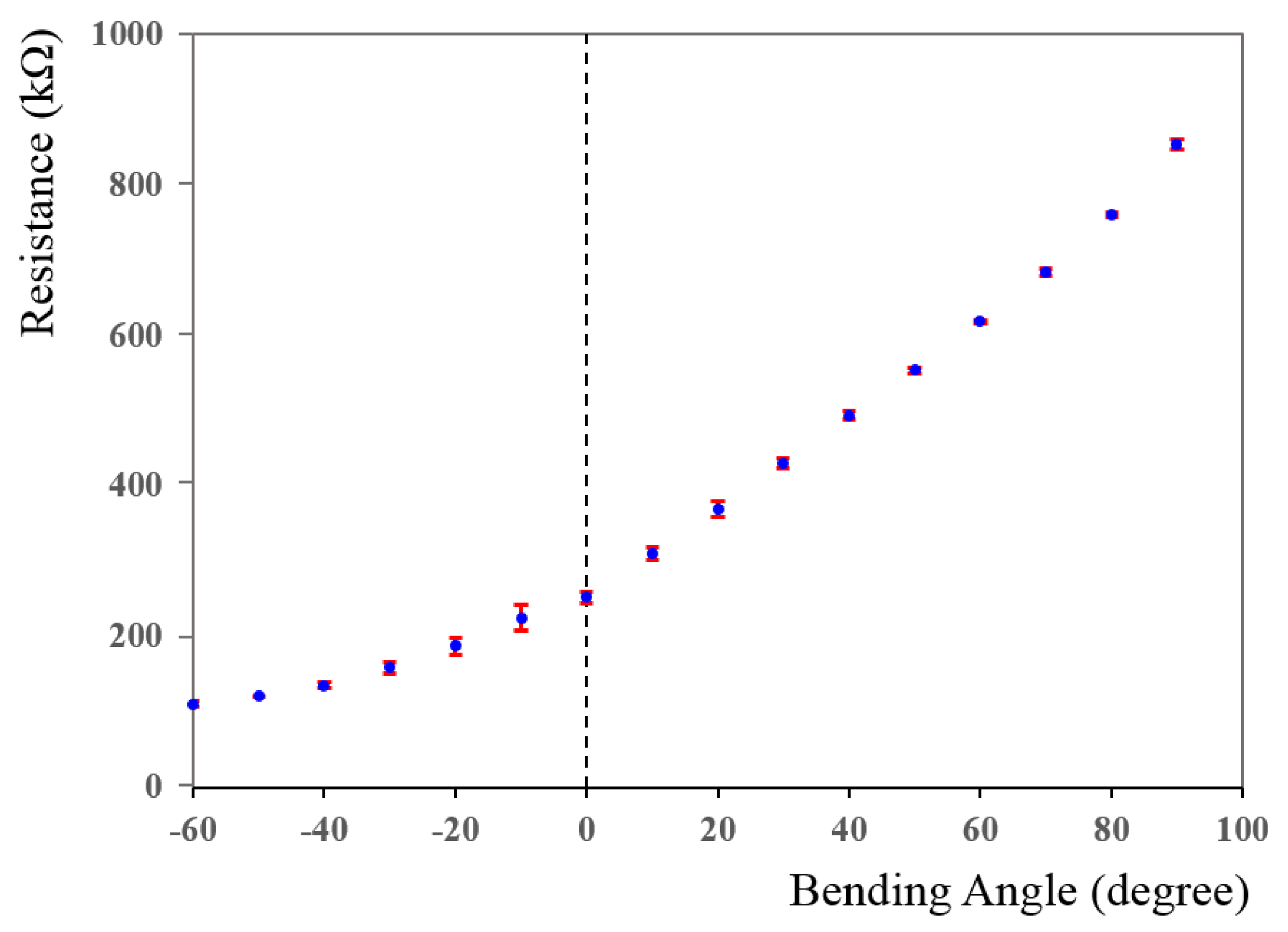
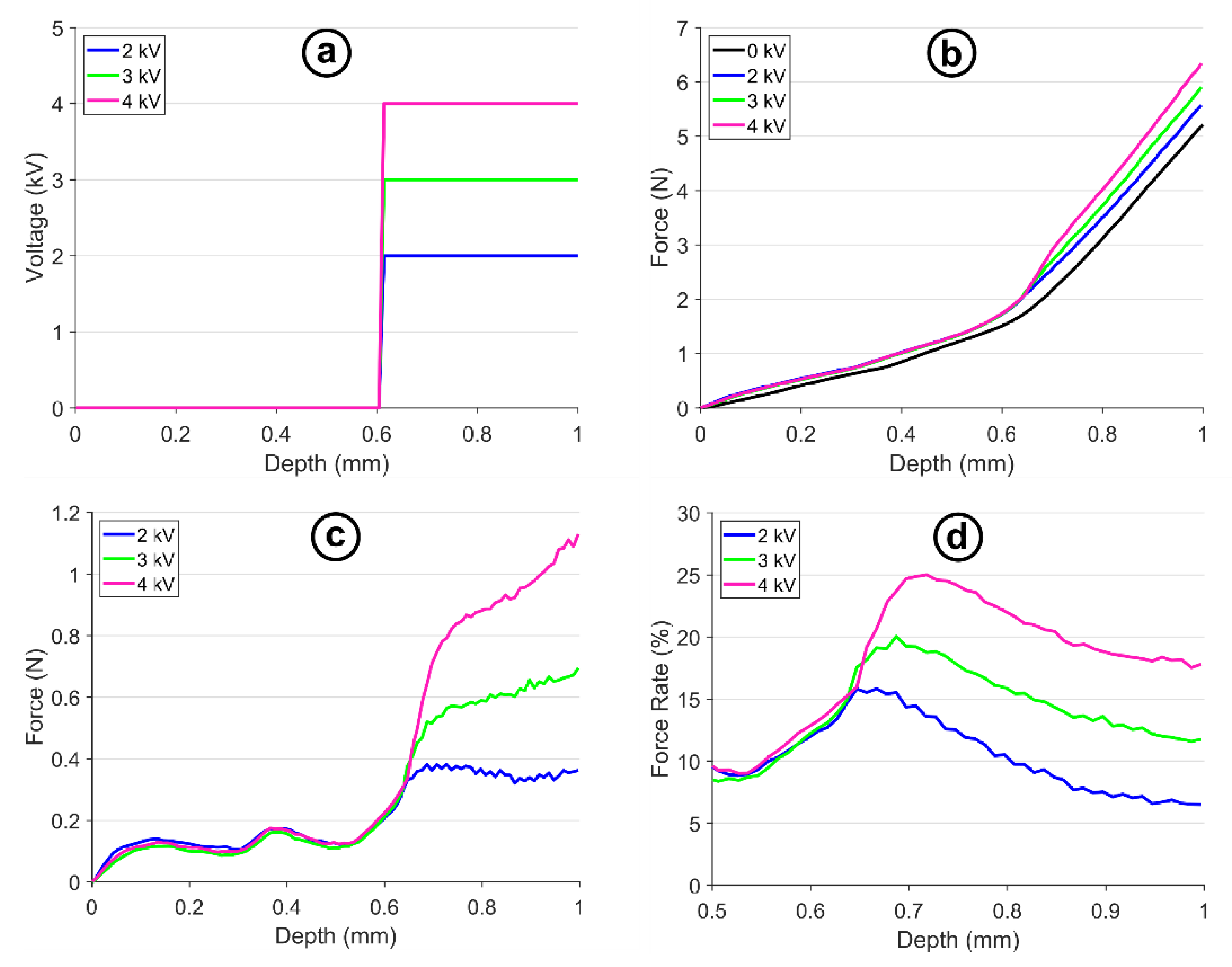
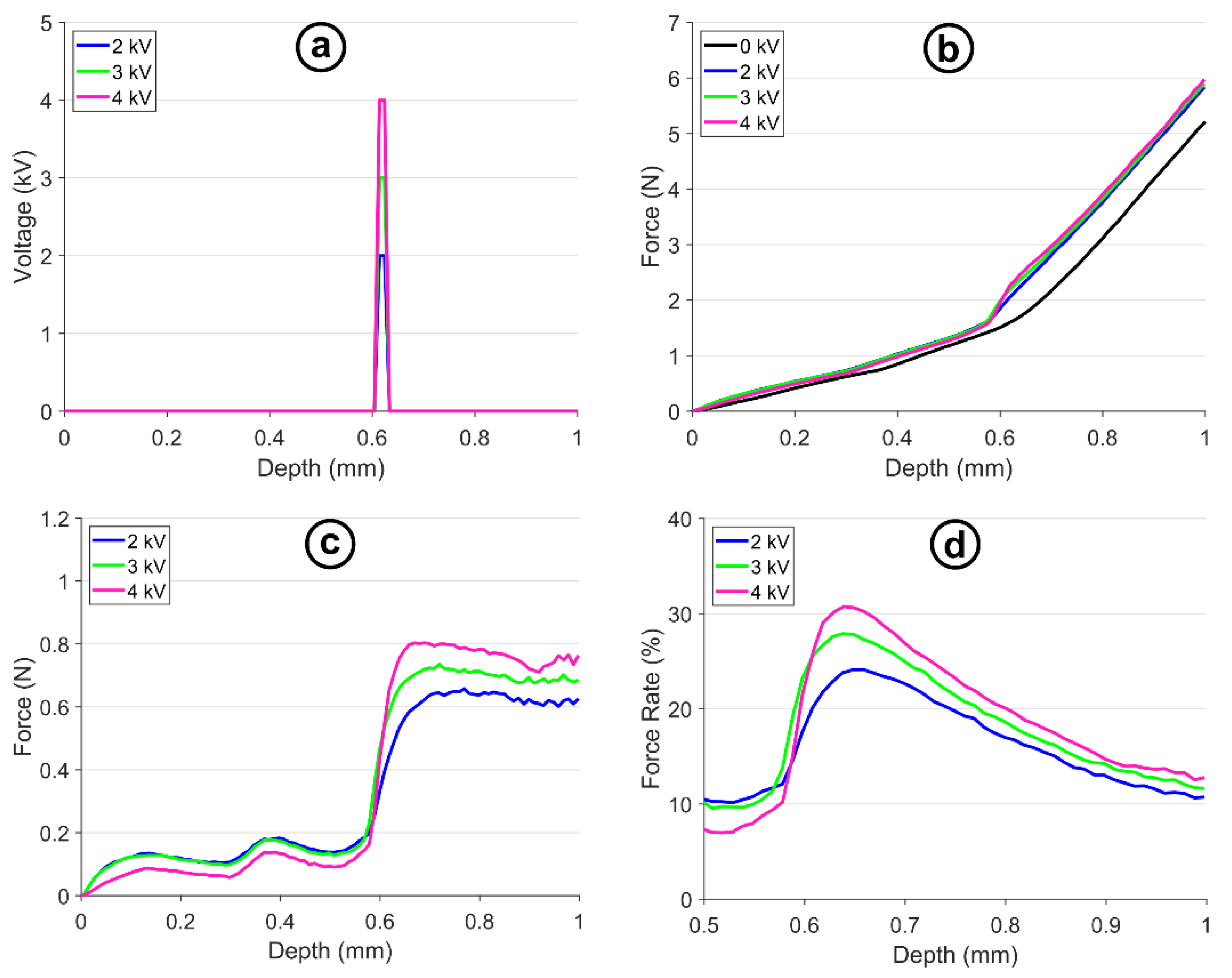
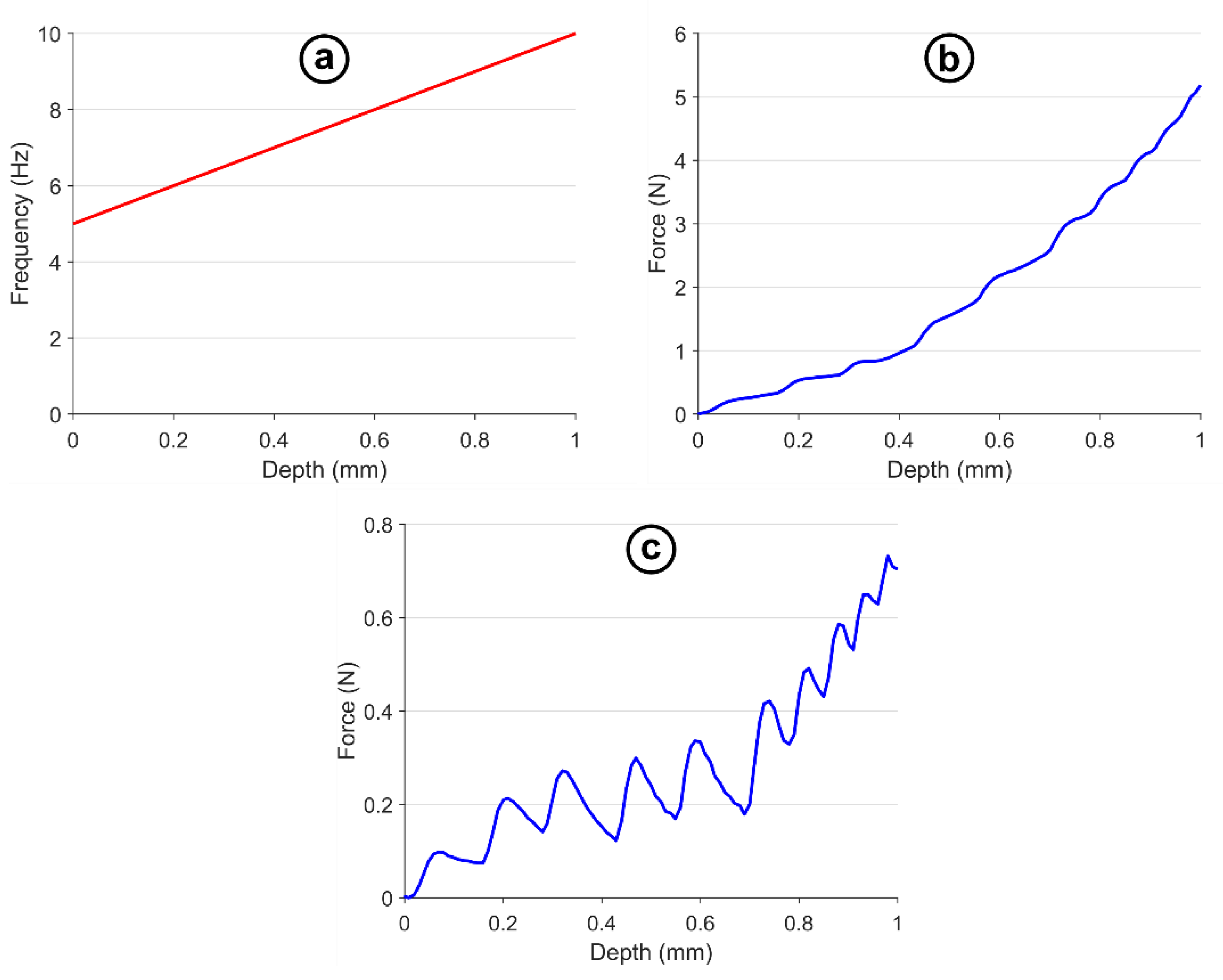
3.3. Dynamic Testing: Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Culbertson, H.; Schorr, S.B.; Okamura, A.M. Haptics: The Present and Future of Artificial Touch Sensation. Annu. Rev. Control Robot. Auton. Syst. 2018, 1, 385–409. [Google Scholar] [CrossRef]
- Srinivasan, M.A.; Basdogan, C. Haptics in Virtual Environments: Taxonomy, Research Status, and Challenges. Comput. Graph. 1997, 21, 393–404. [Google Scholar] [CrossRef]
- Coles, T.R.; Meglan, D.; John, N.W. The Role of Haptics in Medical Training Simulators: A Survey of the State of the Art. IEEE Trans. Haptics 2011, 4, 51–66. [Google Scholar] [CrossRef]
- Eid, M.A.; Al Osman, H. Affective Haptics: Current Research and Future Directions. IEEE Access 2016, 4, 26–40. [Google Scholar] [CrossRef]
- Hayward, V.; Astley, O.R.; Cruz-Hernandez, M.; Grant, D.; Robles-De-La-Torre, G. Haptic Interfaces and Devices. Sens. Rev. 2004, 24, 16–29. [Google Scholar] [CrossRef]
- Jeong, J.-H.; Kim, Y.-M.; Lee, B.; Hong, J.; Kim, J.; Woo, S.-Y.; Yang, T.-H.; Park, Y.-H. Design and Evaluation of Enhanced Mock Circulatory Platform Simulating Cardiovascular Physiology for Medical Palpation Training. Appl. Sci. 2020, 10, 5433. [Google Scholar] [CrossRef]
- Laycock, S.D.; Day, A.M. Recent Developments and Applications of Haptic Devices. Comput. Graph. Forum 2003, 22, 117–132. [Google Scholar] [CrossRef]
- Schneider, O.; Shigeyama, J.; Kovacs, R.; Roumen, J.; Marwecki, S.; Boeckhoff, N.; Gloeckner, D.A.; Bounama, J.; Baudisch, P. DualPanto: A haptic device that enables blind users to continuously interact with virtual worlds. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology—UIST ’18, Berlin, Germany, 14–17 October 2018; pp. 877–887. [Google Scholar]
- Hoggan, E.; Brewster, S.A.; Johnston, J. Investigating the effectiveness of tactile feedback for mobile touchscreens. In Proceedings of the Twenty-Sixth Annual CHI Conference on Human Factors in Computing Systems—CHI ’08, Florence, Italy, 5–10 April 2008; p. 1573. [Google Scholar]
- Zhaoyuan, M.; Edge, D.; Findlater, L.; Tan, H.Z. Haptic keyclick feedback improves typing speed and reduces typing errors on a flat keyboard. In Proceedings of the 2015 IEEE World Haptics Conference (WHC), Evanston, IL, USA, 22–26 June 2015; pp. 220–227. [Google Scholar]
- Culbertson, H.; Walker, J.M.; Okamura, A.M. Modeling and design of asymmetric vibrations to induce ungrounded pulling sensation through asymmetric skin displacement. In Proceedings of the 2016 IEEE Haptics Symposium (HAPTICS), Philadelphia, PA, USA, 8–11 April 2016; pp. 27–33. [Google Scholar]
- Heo, S.; Lee, J.; Wigdor, D. PseudoBend: Producing haptic illusions of stretching, bending, and twisting using grain vibrations. In Proceedings of the 32nd Annual ACM Symposium on User Interface Software and Technology, New Orleans, LA, USA, 20–23 October 2019; pp. 803–813. [Google Scholar]
- Kildal, J. 3D-Press: Haptic illusion of compliance when pressing on a rigid surface. In Proceedings of the International Conference on Multimodal Interfaces and the Workshop on Machine Learning for Multimodal Interaction on—ICMI-MLMI ’10, Beijing, China, 8–10 November 2010; p. 1. [Google Scholar]
- Lederman, S.; Klaztky, R. Haptic Perception: A Tutorial. Atten. Percept. Psychophys. 2009, 71, 1439–1459. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chouvardas, V.G.; Miliou, A.N.; Hatalis, M.K. Tactile Displays: Overview and Recent Advances. Displays 2008, 29, 185–194. [Google Scholar] [CrossRef] [Green Version]
- Johansson, R.S.; Flanagan, J.R. Coding and Use of Tactile Signals from the Fingertips in Object Manipulation Tasks. Nat. Rev. Neurosci. 2009, 10, 345–359. [Google Scholar] [CrossRef]
- Hulliger, M. The mammalian muscle spindle and its central control. In Reviews of Physiology, Biochemistry and Pharmacology; Reviews of Physiology, Biochemistry and Pharmacology; Springer: Berlin/Heidelberg, Germany, 1984; Volume 86, pp. 1–110. ISBN 978-3-540-09488-3. [Google Scholar]
- Moore, J.C. The Golgi Tendon Organ: A Review and Update. Am. J. Occup. Ther. 1984, 38, 227–236. [Google Scholar] [CrossRef] [Green Version]
- Follmer, S.; Leithinger, D.; Olwal, A.; Cheng, N.; Ishii, H. Jamming user interfaces: Programmable particle stiffness and sensing for malleable and shape-changing devices. In Proceedings of the 25th annual ACM symposium on User interface software and technology—UIST ’12, Cambridge, MA, USA, 7–10 October 2012; p. 519. [Google Scholar]
- Genecov, A.M.; Stanley, A.A.; Okamura, A.M. Perception of a haptic jamming display: Just noticeable differences in stiffness and geometry. In Proceedings of the 2014 IEEE Haptics Symposium (HAPTICS), Houston, TX, USA, 23–26 February 2014; pp. 333–338. [Google Scholar]
- Gupta, S.; Campbell, T. Squeezeblock: Using virtual springs in mobile devices for eyes-free interaction. In Proceedings of the 23nd Annual ACM Symposium on User Interface Software and Technology, New York, NY, USA, 3–6 October 2010; pp. 101–104. [Google Scholar]
- Nakagaki, K.; Fitzgerald, D.; Ma, Z.; Vink, L.; Levine, D.; Ishii, H. InFORCE: Bi-Directional ‘force’ shape display for haptic interaction. In Proceedings of the Thirteenth International Conference on Tangible, Embedded, and Embodied Interaction, Tempe, AZ, USA, 17–20 March 2019; pp. 615–623. [Google Scholar]
- Nakagaki, K.; Vink, L.; Counts, J.; Windham, D.; Leithinger, D.; Follmer, S.; Ishii, H. Materiable: Rendering dynamic material properties in response to direct physical touch with shape changing interfaces. In Proceedings of the 2016 CHI Conference on Human Factors in Computing Systems, San Jose, CA, USA, 7–12 May 2016; pp. 2764–2772. [Google Scholar]
- Agharese, N.; Cloyd, T.; Blumenschein, L.H.; Raitor, M.; Hawkes, E.W.; Culbertson, H.; Okamura, A.M. HapWRAP: Soft growing wearable haptic device. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 5466–5472. [Google Scholar]
- Biswas, S.; Visell, Y. Emerging Material Technologies for Haptics. Adv. Mater. Technol. 2019, 4, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Boys, H.; Frediani, G.; Ghilardi, M.; Poslad, S.; Busfield, J.C.; Carpi, F. Soft Wearable non-vibratory tactile displays. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 270–275. [Google Scholar]
- Mazursky, A.; Teng, S.-Y.; Nith, R.; Lopes, P. MagnetIO: Passive yet interactive soft haptic patches anywhere. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–15. [Google Scholar]
- Qamar, I.P.S.; Groh, R.; Holman, D.; Roudaut, A. HCI meets material science: A literature review of morphing materials for the design of shape-changing interfaces. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems—CHI ’18, Montreal, QC, Canada, 21–26 April 2018; pp. 1–23. [Google Scholar]
- Yang, T.-H.; Kim, J.R.; Jin, H.; Gil, H.; Koo, J.-H.; Kim, H.J. Recent Advances and Opportunities of Active Materials for Haptic Technologies in Virtual and Augmented Reality. Adv. Funct. Mater. 2021, 30. [Google Scholar] [CrossRef]
- Yun, S.; Park, S.; Park, B.; Ryu, S.; Jeong, S.M.; Kyung, K.-U. A Soft and Transparent Visuo-Haptic Interface Pursuing Wearable Devices. IEEE Trans. Ind. Electron. 2020, 67, 717–724. [Google Scholar] [CrossRef]
- Poupyrev, I.; Maruyama, S. Tactile interfaces for small touch screens. In Proceedings of the 16th Annual ACM Symposium on User Interface Software and Technology, Vancouver, BC, Canada, 2–5 November 2003; Volume 5, pp. 217–220. [Google Scholar]
- Rekimoto, J.; Schwesig, C. PreSenseII: Bi-Directional touch and pressure sensing interactions with tactile feedback. In Proceedings of the CHI ’06 extended abstracts on Human factors in computing systems—CHI EA ’06, Montréal, QC, Canada, 22–27 April 2006; pp. 1253–1258. [Google Scholar]
- Hamdan, N.A.; Wagner, A.; Voelker, S.; Steimle, J.; Borchers, J. Springlets: Expressive, flexible and silent on-skin tactile interfaces. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems—CHI ’19, Glasgow, Scotland, UK, 4–9 May 2019; pp. 1–14. [Google Scholar]
- Hwang, D.; Lee, J.; Kim, K. On the Design of a Miniature Haptic Ring for Cutaneous Force Feedback Using Shape Memory Alloy Actuators. Smart Mater. Struct. 2017, 26, 105002. [Google Scholar] [CrossRef]
- Nakagawa, Y.; Kamimura, A.; Kawaguchi, Y. MimicTile: A variable stiffness deformable user interface for mobile devices. In Proceedings of the 2012 ACM Annual conference on Human Factors in Computing Systems—CHI ’12, Austin, TX, USA, 5–10 May 2012; pp. 745–748. [Google Scholar]
- Chen, D.; Song, A.; Tian, L.; Zeng, H.; Xiong, P. Development of a Multi-Directional Controlled Small-Scale Spherical MR Actuator for Haptic. IEEE/ASME Trans. Mechatron. 2019, 24, 1597–1607. [Google Scholar] [CrossRef]
- Coon, A.; Yang, T.-H.; Kim, Y.-M.; Kang, H.; Koo, J.-H. Application of Magneto-Rheological Fluids for Investigating the Effect of Skin Properties on Arterial Tonometry Measurements. Front. Mater. 2019, 6, 1–10. [Google Scholar] [CrossRef]
- Han, Y.M.; Oh, J.S.; Kim, J.K.; Choi, S.B. Design and Experimental Evaluation of a Tactile Display Featuring Magnetorheological Fluids. Smart Mater. Struct. 2014, 23, 1–11. [Google Scholar] [CrossRef]
- Heo, Y.H.; Byeon, S.; Kim, T.-H.; Yun, I.-H.; Kim, J.R.; Kim, S.-Y. Investigation of a Haptic Actuator Made with Magneto-Rheological Fluids for Haptic Shoes Applications. Actuators 2020, 10, 5. [Google Scholar] [CrossRef]
- Jansen, Y.; Karrer, T.; Borchers, J. MudPad: Localized tactile feedback on touch surfaces. In Proceedings of the 23nd Annual ACM Symposium on User Interface Software and Technology, New York, NY, USA, 3–6 October 2010; pp. 385–386. [Google Scholar]
- Yang, T.-H.; Kwon, H.-J.; Lee, S.S.; An, J.; Koo, J.-H.; Kim, S.-Y.; Kwon, D.-S. Development of a Miniature Tunable Stiffness Display Using MR Fluids for Haptic Application. Sens. Actuators A Phys. 2010, 163, 180–190. [Google Scholar] [CrossRef]
- Yang, T.H.; Koo, J.H.; Kim, S.Y.; Kwon, D.S. Modeling and Test of a Kinaesthetic Actuator Based on MR Fluid for Haptic Applications. Rev. Sci. Instrum. 2017, 88, 1–11. [Google Scholar] [CrossRef]
- Yang, T.H.; Koo, J.H. Experimental Evaluation of a Miniature MR Device for a Wide Range of Human Perceivable Haptic Sensations. Smart Mater. Struct. 2017, 26, 1–12. [Google Scholar] [CrossRef]
- Heo, Y.H.; Choi, D.-S.; Yun, I.-H.; Kim, S.-Y. A Tiny Haptic Knob Based on Magnetorheological Fluids. Appl. Sci. 2020, 10, 5118. [Google Scholar] [CrossRef]
- Choi, S.B.; Cheong, C.C.; Jung, J.M.; Choi, Y.T. Position Control of an ER Valve-Cylinder System via Neural Network Controller. Mechatronics 1997, 7, 37–52. [Google Scholar] [CrossRef]
- Stangroom, J. Electrorheological Fluids. Phys. Technol. 1983, 14, 290–296. [Google Scholar] [CrossRef]
- Whittle, M.; Atkin, R.J.; Bullough, W.A. Dynamics of an Electrorheological Valve. Int. J. Mod. Phys. B 1996, 10, 2933–2950. [Google Scholar] [CrossRef]
- Goto, M.; Takemura, K. Tactile bump display using electro-rheological fluid. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 4478–4483. [Google Scholar]
- Monkman, G.J. An Electrorheological Tactile Display. Presence Teleoperators Virtual Environ. 1992, 1, 219–228. [Google Scholar] [CrossRef]
- Pfeiffer, C.; Mavroidis, C.; Bar-Cohen, Y.; Dolgin, B. Electrorheological fluid based force feedback device. In Proceedings of the 1999 SPIE Telemanipulator and Telepresence Technologies VI, Boston, MA, USA, 19–20 September 1999; Volume 3840, pp. 88–99. [Google Scholar]
- Tsujita, T.; Kobayashi, M.; Nakano, M. Design and Development of a Braille Display Using Micro Actuators Driven by ER Suspension. Int. J. Appl. Electromagn. Mech. 2010, 33, 1661–1669. [Google Scholar] [CrossRef]
- Mazursky, A.; Koo, J.-H.; Yang, T.-H. Experimental evaluation of a miniature haptic actuator based on electrorheological fluids. In Proceedings of the Active and Passive Smart Structures and Integrated Systems XII, Denver, CO, USA, 5–8 March 2018; p. 7. [Google Scholar]
- Kim, S.; Lee, G. Haptic feedback design for a virtual button along force-displacement curves. In Proceedings of the 26th Annual ACM Symposium on User Interface Software and Technology, St. Andrews, Scotland, UK, 8–11 October 2013; pp. 91–96. [Google Scholar]
- Liao, Y.-C.; Kim, S.; Lee, B.; Oulasvirta, A. Button simulation and design via FDVV models. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–14. [Google Scholar]
- Ogawa, D.; Yem, V.; Hachisu, T.; Kajimoto, H. Multiple texture button by adding haptic vibration and displacement sensing to the physical button. In Proceedings of the SIGGRAPH Asia 2015 Haptic Media And Contents Design, Kobe, Japan, 2–6 November 2015; pp. 1–2. [Google Scholar]
- Mazursky, A.; Koo, J.-H.; Yang, T.-H. A Compact and Compliant Electrorheological Actuator for Generating a Wide Range of Haptic Sensations. Smart Mater. Struct. 2020, 29, 055028. [Google Scholar] [CrossRef]
- Mazursky, A.; Koo, J.-H.; Yang, T.-H. Design, Modeling, and Evaluation of a Slim Haptic Actuator Based on Electrorheological Fluid. J. Intell. Mater. Syst. Struct. 2019, 30, 2521–2533. [Google Scholar] [CrossRef]
- Mazursky, A.; Yang, T.-H.; Woo, S.-Y.; Koo, J.-H. Incorporating sensing capability in an electrorheological haptic module. In Proceedings of the ICAST2019: 30th International Conference on Adaptive Structures and Technologies, Montreal, QC, Canada, 7–11 October 2019; p. 2. [Google Scholar]
- Wen, W.; Huang, X.; Yang, S.; Lu, K.; Sheng, P. The Giant Electrorheological Effect in Suspensions of Nanoparticles. Nat. Mater 2003, 2, 727–730. [Google Scholar] [CrossRef]
- Xu, Z.; Hong, Y.; Zhang, M.; Wu, J.; Wen, W. Performance Tuning of Giant Electrorheological Fluids by Interfacial Tailoring. Soft Matter 2018, 14, 1427–1433. [Google Scholar] [CrossRef] [PubMed]
- Pang, X.D.; Tan, H.Z.; Durlach, N.I. Manual Discrimination of Force Using Active Finger Motion. Percept. Psychophys. 1991, 49, 531–540. [Google Scholar] [CrossRef] [PubMed]
- Kang, D.; Pikhitsa, P.V.; Choi, Y.W.; Lee, C.; Shin, S.S.; Piao, L.; Park, B.; Suh, K.-Y.; Kim, T.; Choi, M. Ultrasensitive Mechanical Crack-Based Sensor Inspired by the Spider Sensory System. Nature 2014, 516, 222–226. [Google Scholar] [CrossRef] [PubMed]
- Park, B.; Kim, J.; Kang, D.; Jeong, C.; Kim, K.S.; Kim, J.U.; Yoo, P.J.; Kim, T. Dramatically Enhanced Mechanosensitivity and Signal-to-Noise Ratio of Nanoscale Crack-Based Sensors: Effect of Crack Depth. Adv. Mater. 2016, 28, 8130–8137. [Google Scholar] [CrossRef] [PubMed]
- Gamota, D.R.; Filisko, F.E. Dynamic Mechanical Studies of Electrorheological Materials: Moderate Frequencies. J. Rheol. 1991, 35, 399–425. [Google Scholar] [CrossRef]
- Lee, H.-G.; Choi, S.-B. Dynamic Properties of an ER Fluid under Shear and Flow Modes. Mater. Des. 2002, 23, 69–76. [Google Scholar] [CrossRef]
- Bucolo, M.; Buscarino, A.; Famoso, C.; Fortuna, L.; Frasca, M. Control of Imperfect Dynamical Systems. Nonlinear Dyn. 2019, 98, 2989–2999. [Google Scholar] [CrossRef]
- Davis, L.C. Time-Dependent and Nonlinear Effects in Electrorheological Fluids. J. Appl. Phys. 1997, 81, 1985–1991. [Google Scholar] [CrossRef]
- Kamath, G.M.; Wereley, N.M. A Nonlinear Viscoelastic—Plastic Model for Electrorheological Fluids. Smart Mater. Struct. 1997, 6, 351–359. [Google Scholar] [CrossRef]
- Myers, B. Challenges of HCI Design and Implementation. Interactions 1994, 1, 73–83. [Google Scholar] [CrossRef]
- Bae, G.Y.; Pak, S.W.; Kim, D.; Lee, G.; Kim, D.H.; Chung, Y.; Cho, K. Linearly and Highly Pressure-Sensitive Electronic Skin Based on a Bioinspired Hierarchical Structural Array. Adv. Mater. 2016, 28, 5300–5306. [Google Scholar] [CrossRef] [PubMed]
- Ramuz, M.; Tee, B.C.-K.; Tok, J.B.-H.; Bao, Z. Transparent, Optical, Pressure-Sensitive Artificial Skin for Large-Area Stretchable Electronics. Adv. Mater. 2012, 24, 3223–3227. [Google Scholar] [CrossRef] [PubMed]
- Gagliano, S.; Stella, G.; Bucolo, M. Real-Time Detection of Slug Velocity in Microchannels. Micromachines 2020, 11, 241. [Google Scholar] [CrossRef] [Green Version]
- Qian, B.; McKinley, G.H.; Hosoi, A.E. Structure Evolution in Electrorheological Fluids Flowing through Microchannels. Soft Matter 2013, 9, 2889. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Value | Description | Value |
|---|---|---|---|
| Initial spring electrode gap | 1.3 mm | Membrane thickness (PDMS) | 0.43 mm |
| Spring electrode radius | 4.7 mm | Membrane thickness (VHB) | 0.08 mm |
| Fixed electrode gap | 1.8 mm | Membrane radius | 7.5 mm |
| Fixed inner electrode radius | 7.5 mm | Compensation chamber width | 2.34 mm |
| Fixed outer electrode radius | 11 mm | Viscosity of GER fluid | 0.060 Pa s |
| Maximum indentation depth | 1 mm | GER fluid yield stress at 5 kV/mm | 80 kPa |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mazursky, A.; Koo, J.-H.; Mason, T.; Woo, S.-Y.; Yang, T.-H. Design and Experimental Evaluation of an Electrorheological Haptic Module with Embedded Sensing. Appl. Sci. 2021, 11, 7723. https://doi.org/10.3390/app11167723
Mazursky A, Koo J-H, Mason T, Woo S-Y, Yang T-H. Design and Experimental Evaluation of an Electrorheological Haptic Module with Embedded Sensing. Applied Sciences. 2021; 11(16):7723. https://doi.org/10.3390/app11167723
Chicago/Turabian StyleMazursky, Alex, Jeong-Hoi Koo, Taylor Mason, Sam-Yong Woo, and Tae-Heon Yang. 2021. "Design and Experimental Evaluation of an Electrorheological Haptic Module with Embedded Sensing" Applied Sciences 11, no. 16: 7723. https://doi.org/10.3390/app11167723