
In-Cylinder Oxygen Concentration Estimation Based on Virtual Measurement and Data Fusion Algorithm for Turbocharged Diesel Engines


Abstract
:1. Introduction
- An ICOC model based on ignition delay is proposed;
- Kalman filter is applied as a data fusion algorithm to improve ICOC estimation results;
- The influence of gas mass uncertainty to ICOC estimation is studied quantitative;
- A calibrated GT-power model is designed to validate the proposed method, results show that the ICOC estimation errors improved form at worst 0.03 to at best 0.01 on steady state.
2. Dynamical Modeling
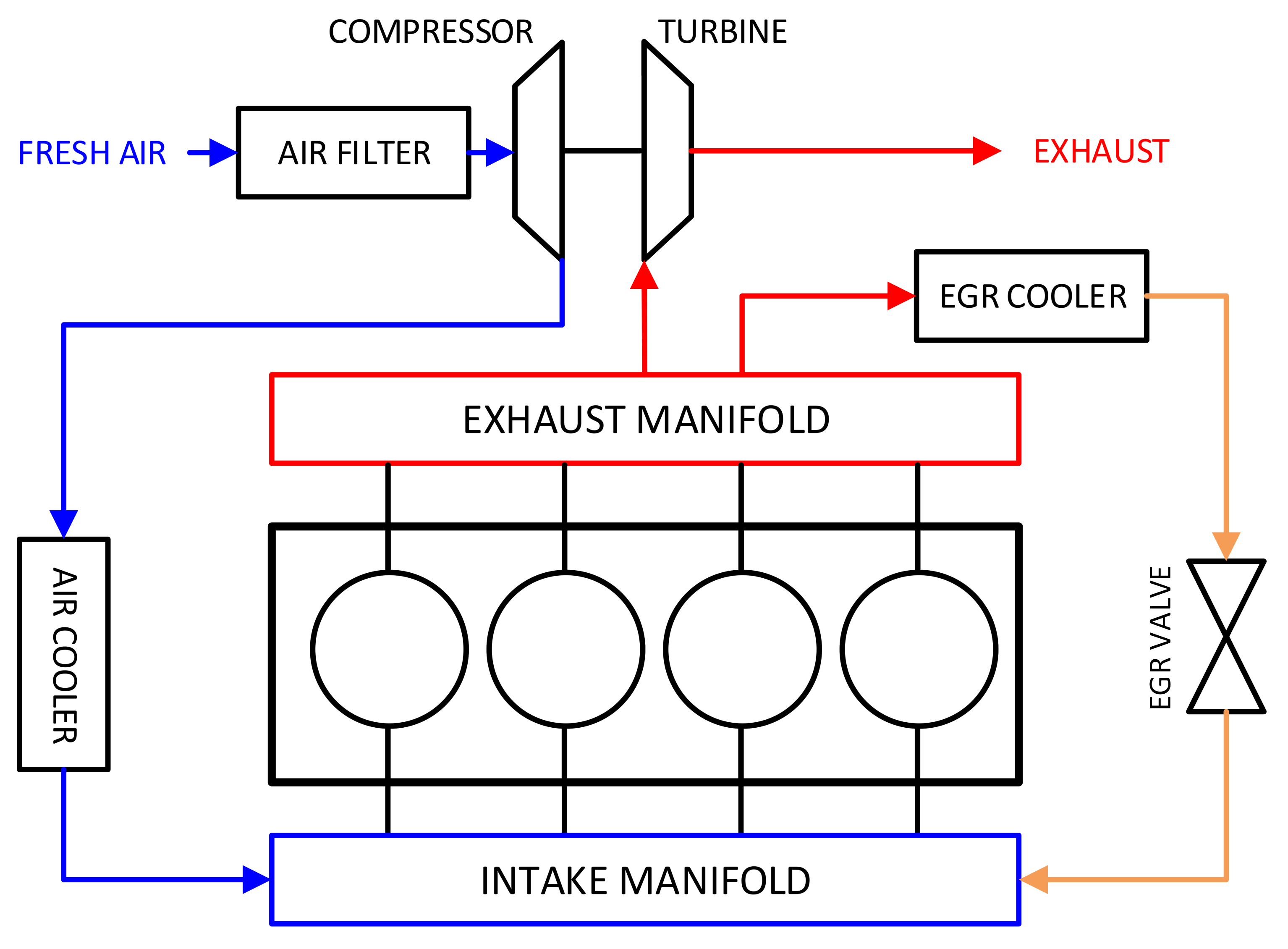
2.1. Modeling of VGT
2.2. In-Cylinder, Intake and Exhaust Oxygen Concentration
- When the flow is not choked ,
- When the flow is choked ,
2.3. System Dynamic Equations in State-Space Form
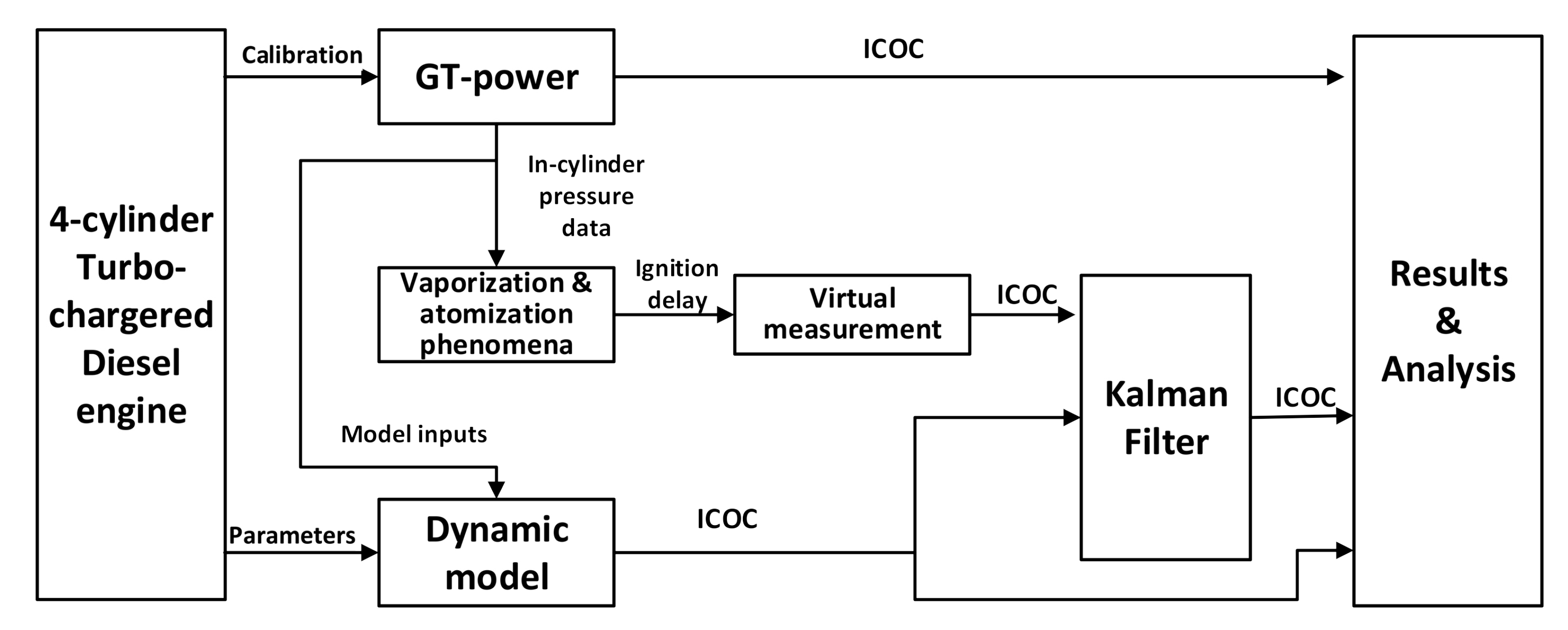
3. Virtual Measurement
3.1. Calibration
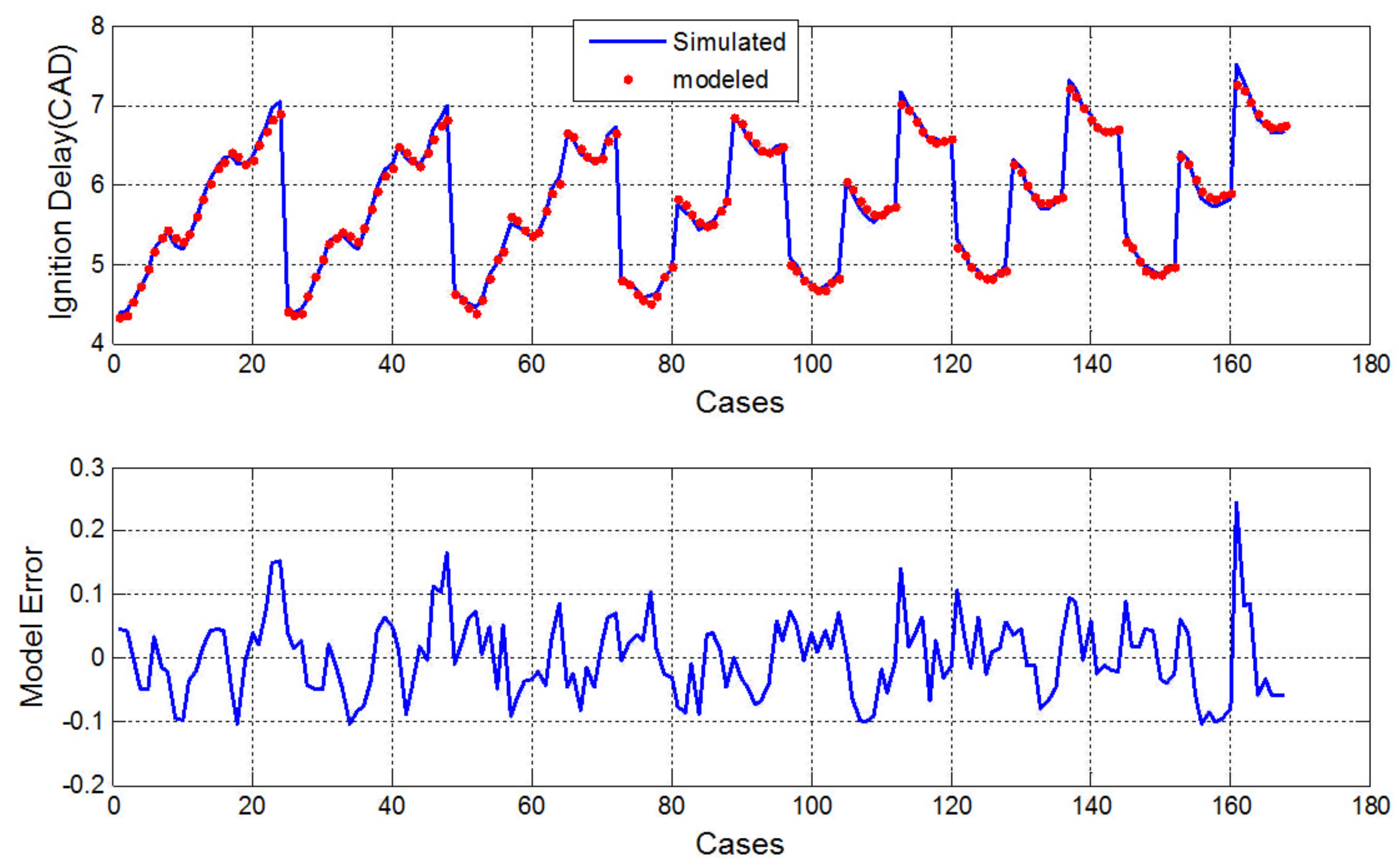
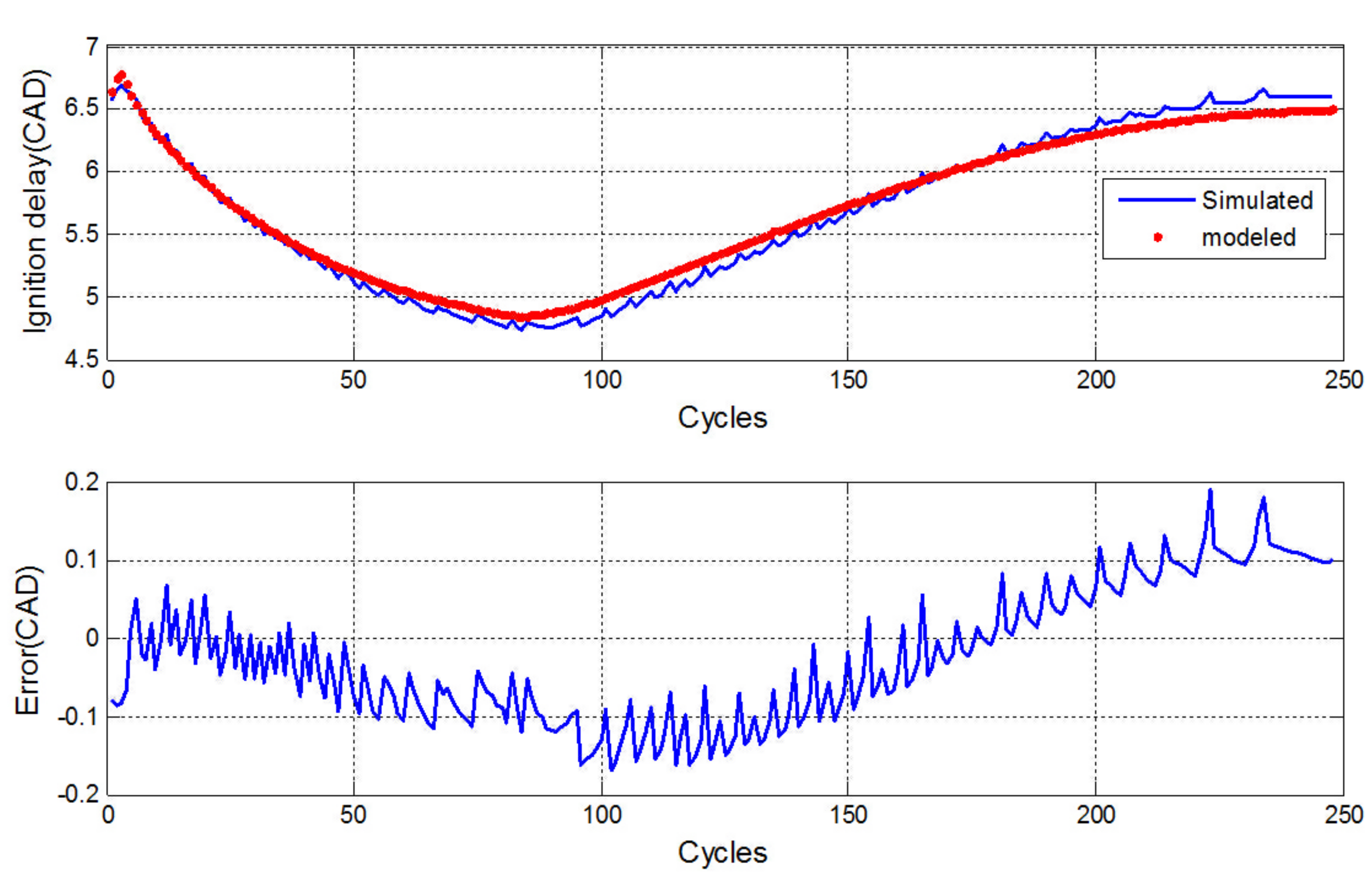
3.2. Model Validation
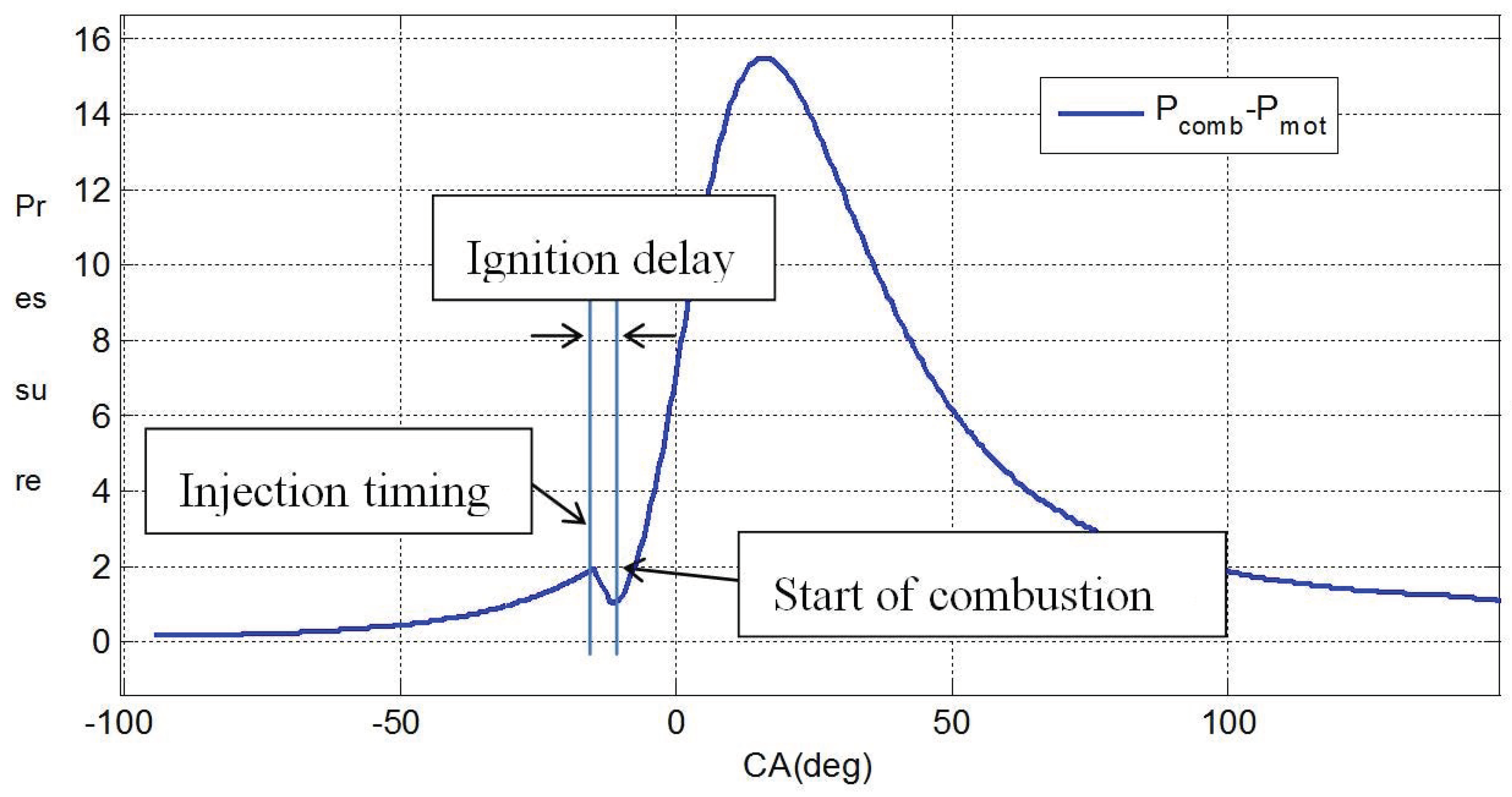
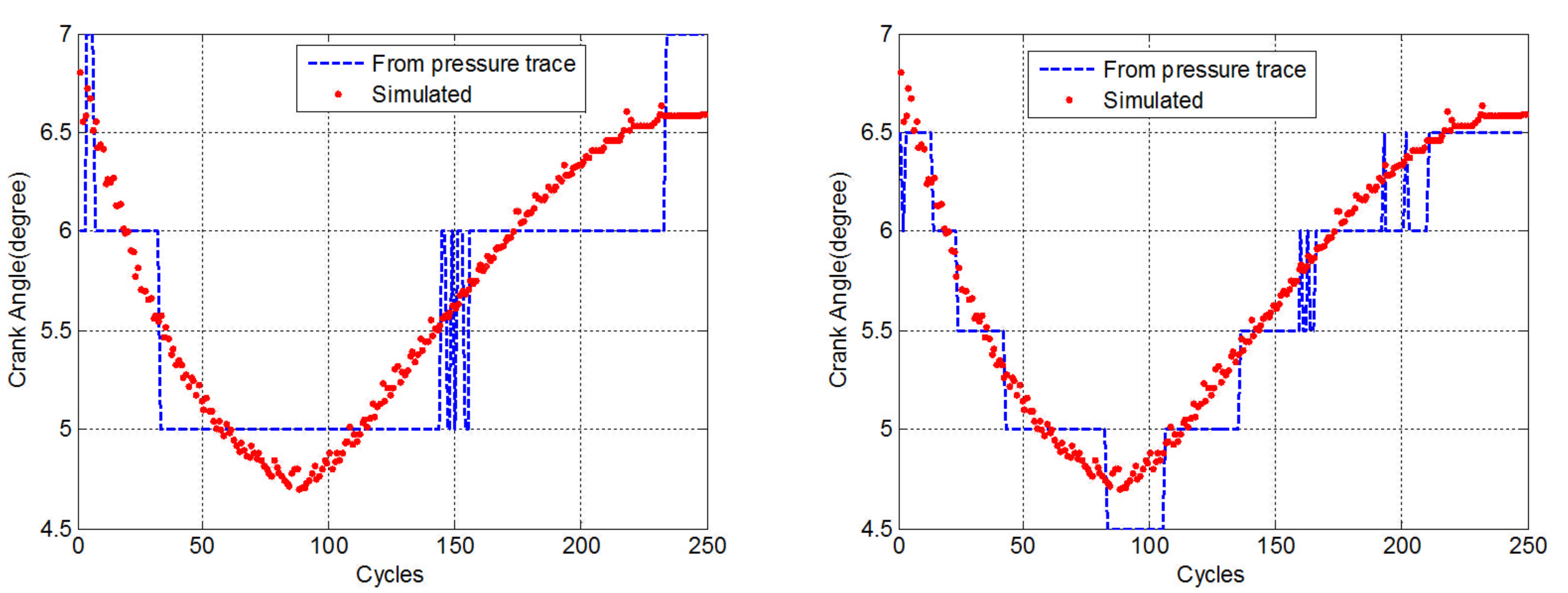
3.3. Pressure Trace
4. Data Fusion Algorithm
Kalman Filter Design
- 1.
- State predicting,
- 2.
- State covariance predicting,
- 3.
- Covariance innovation,
- 4.
- Filter gain,
- 5.
- State estimation updating,
- 6.
- State covariance updating,
5. Simulation Validation
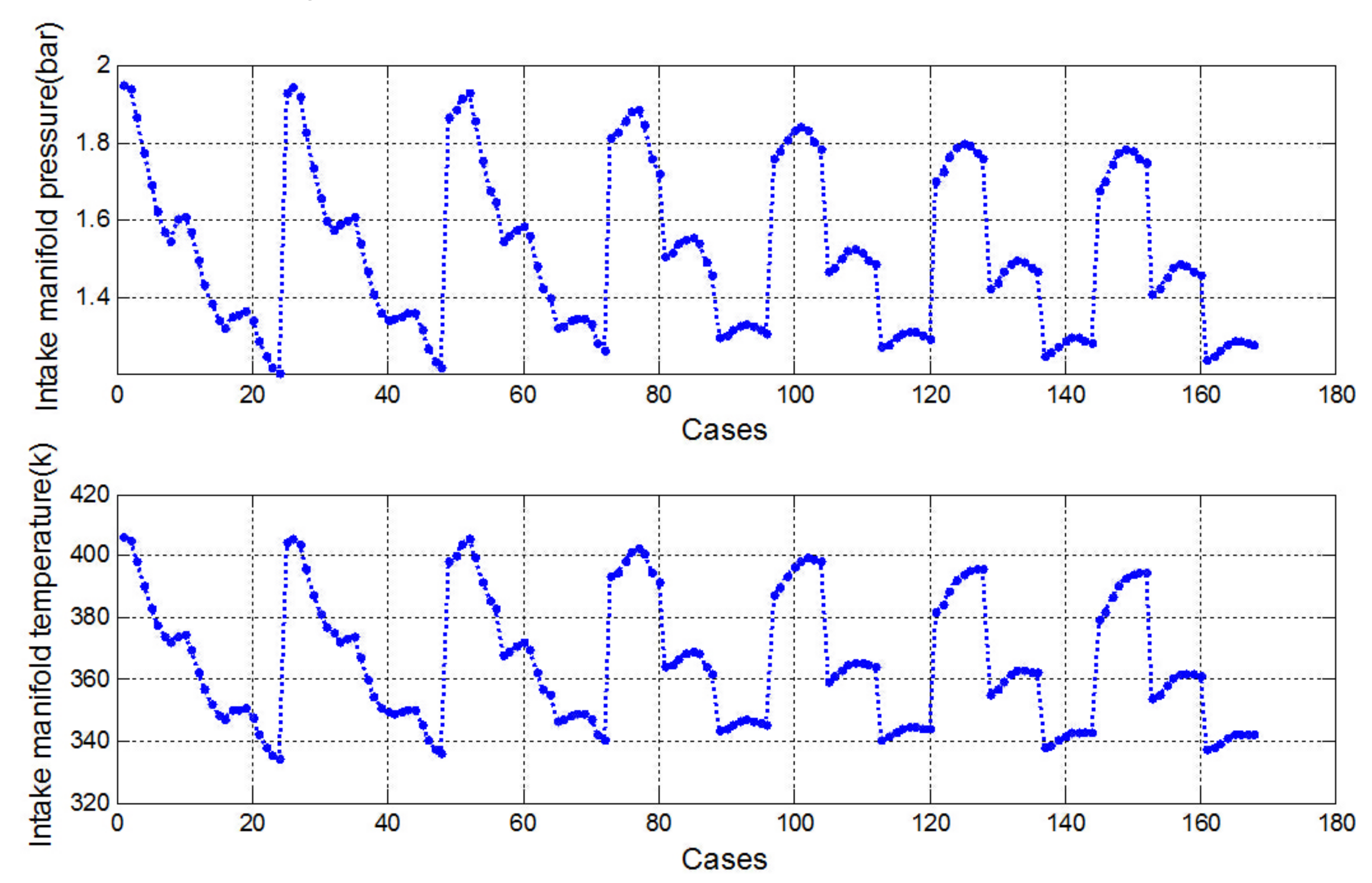
5.1. Simulation Settings
5.2. Covariance Matrices
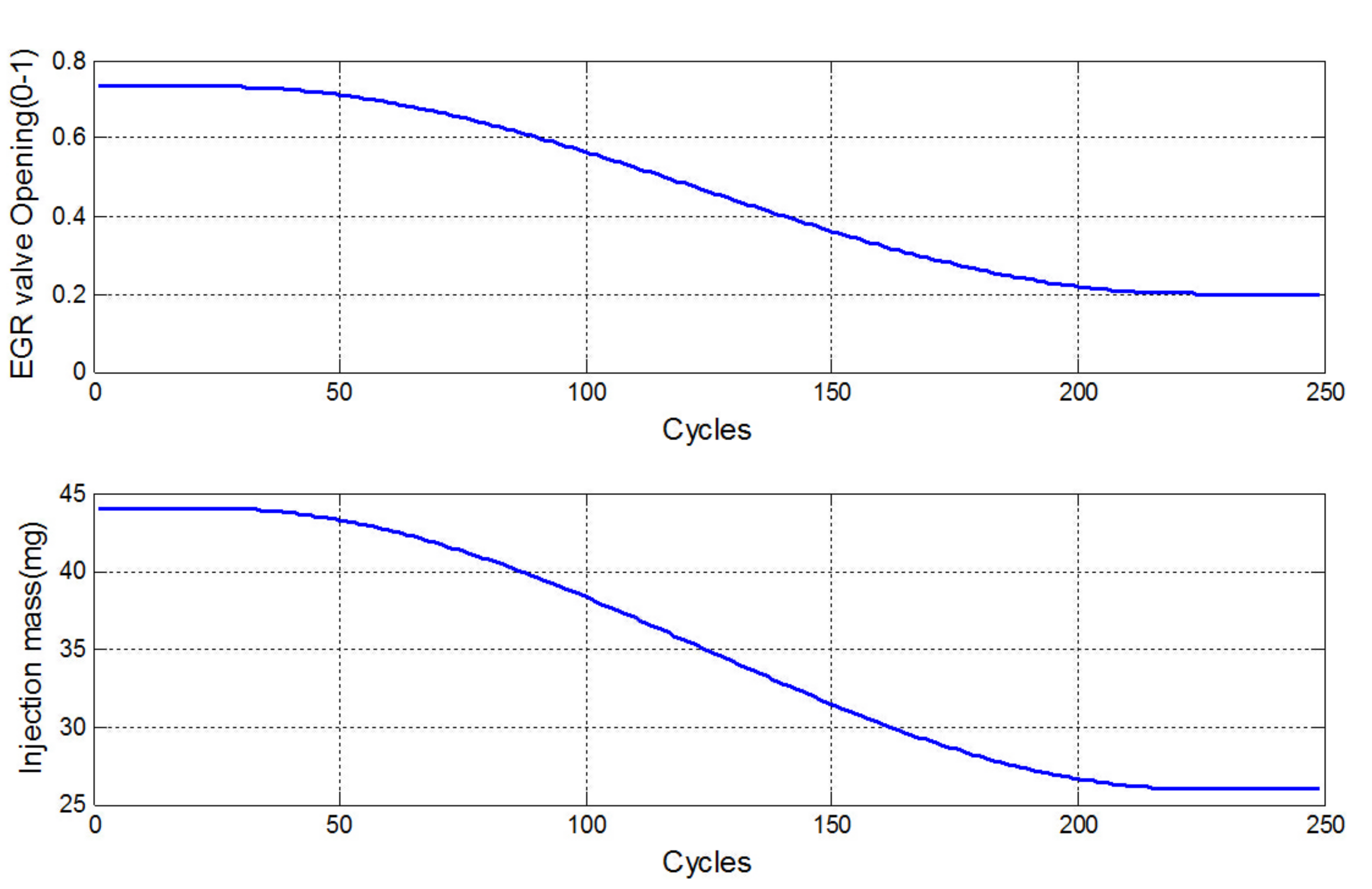
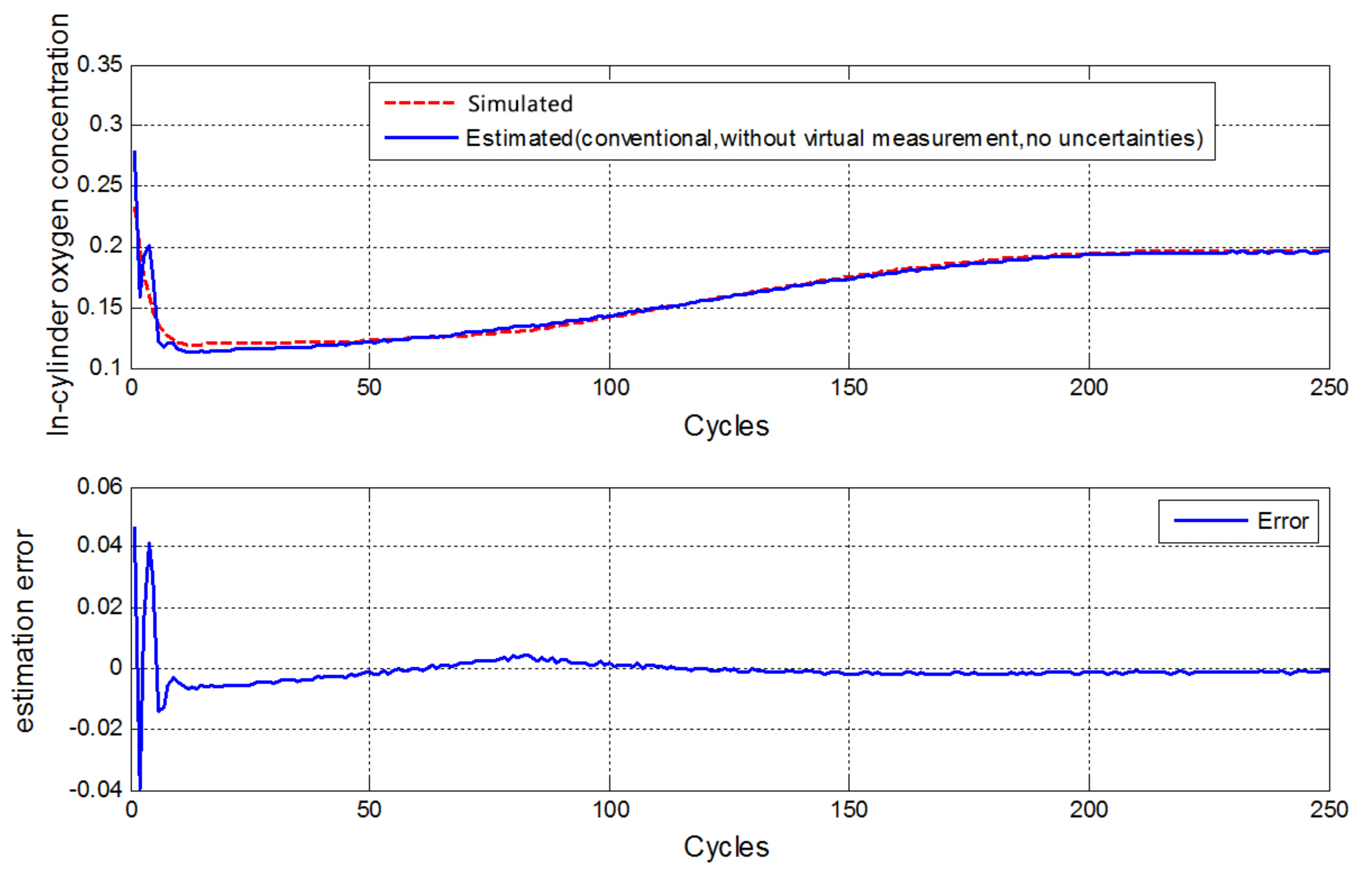
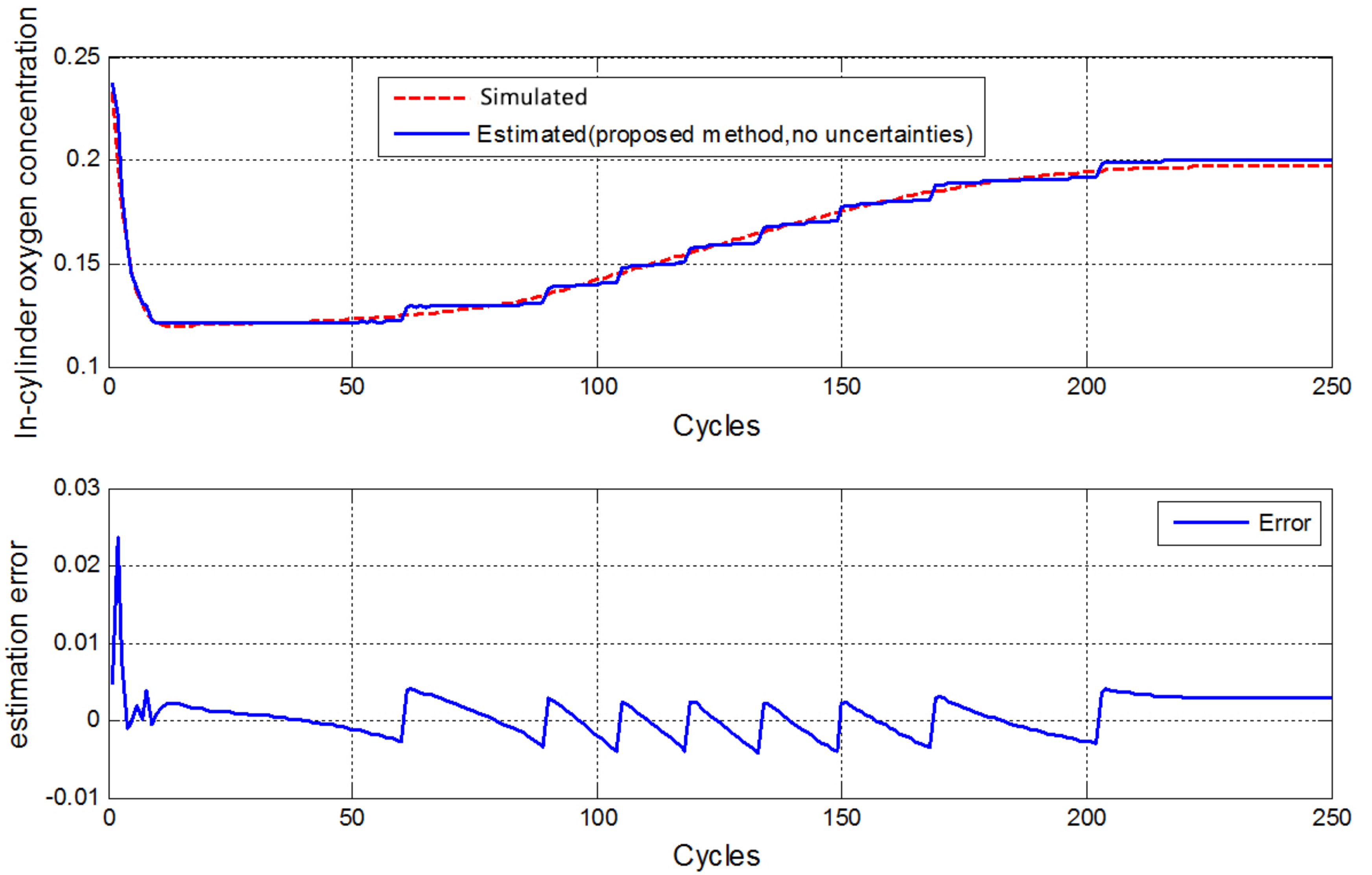
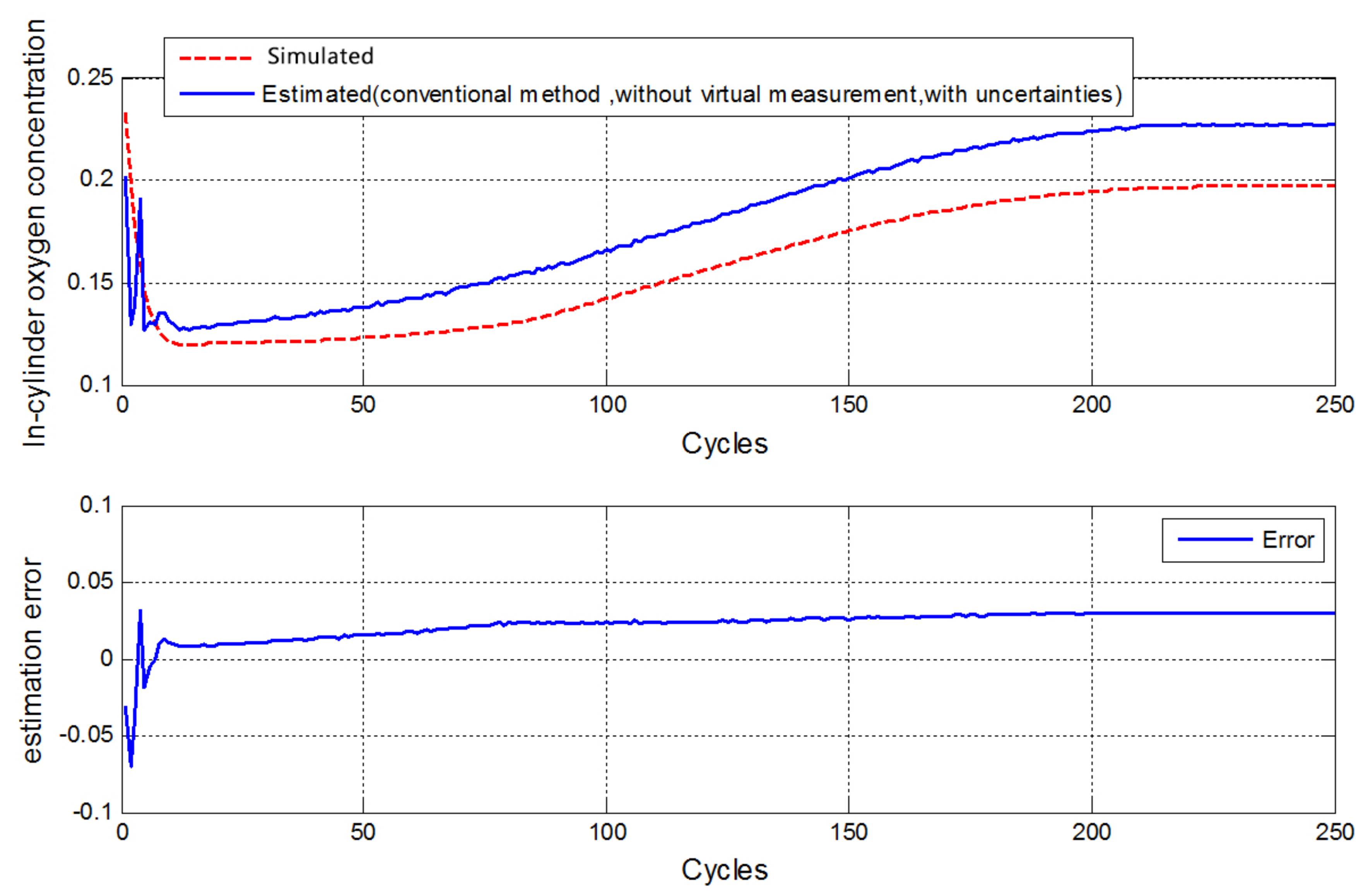
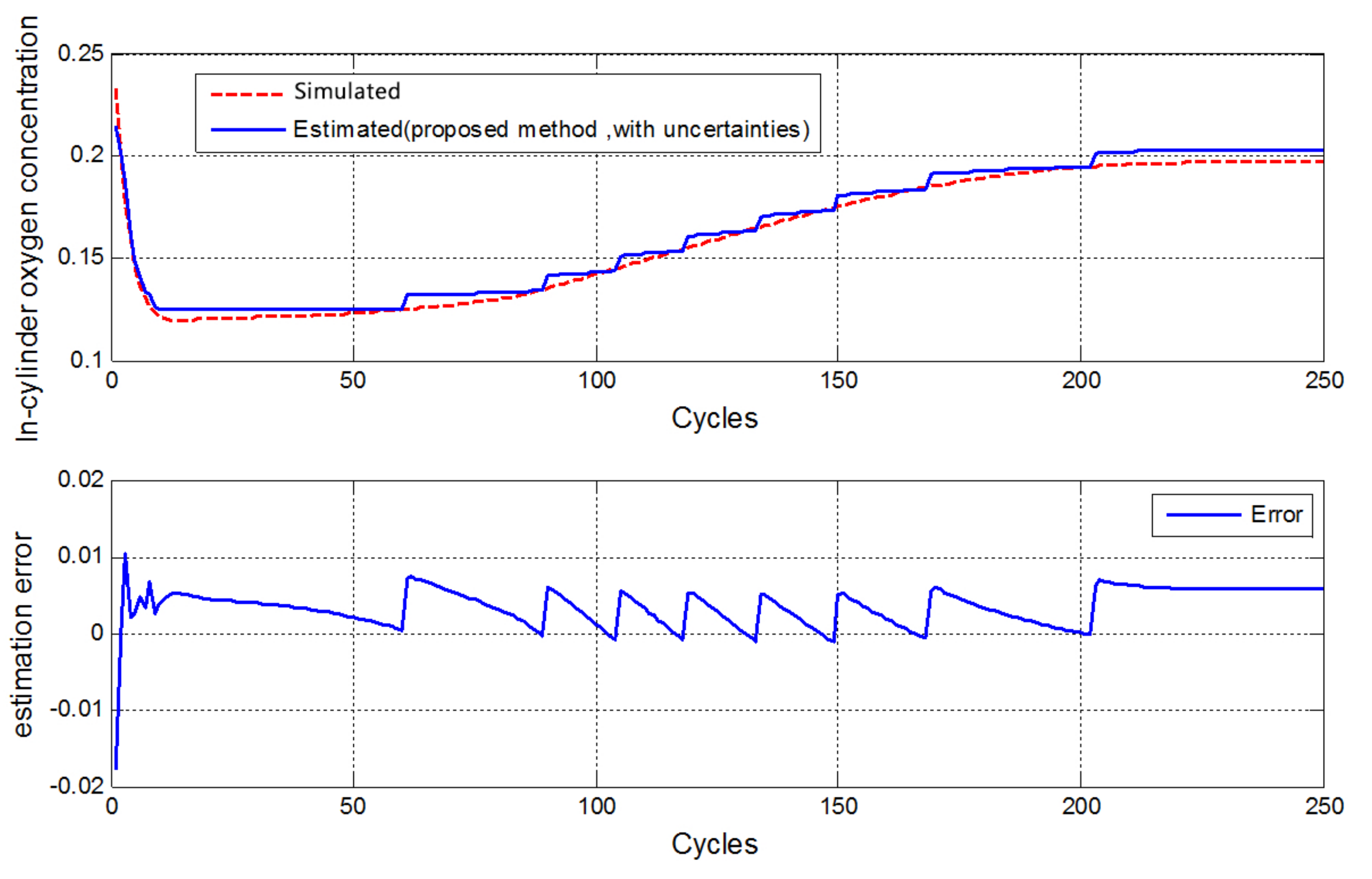
5.3. Simulation Scenarios
6. Conclusions
- The dynamical model is sensitive to gas mass uncertainty and in-cylinder temperature and pressure. With no gas mass uncertainty, it can estimate ICOC finely at engine steady state, but poorly at cold start state. Whereas, with gas mass uncertainty, the estimation results becomes poor even at steady state;
- The virtual measurement, is insensitive to gas mass uncertainty and model error. With 10% model error, it can estimate ICOC with a error within (−0.005, 0.005) at steady state, and a error within (0, 0.025) at cold start state;
- The data fusion algorithm, presented for correcting the virtual measurement results, further refines the estimation errors to (0, 0.005) at steady state and to (−0.01, 0.01) at cold start state.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ICOC | In-cylinder oxygen concentration; |
| HCCI | Homogeneous charge compression ignition; |
| LTDC | Low temperature diffusion combustion; |
| PCCI | Premixed charge compression ignition; |
| RCCI | Reactivity controlled compression ignition; |
| VGT | Variable geometry turbocharger; |
| VVT | Variable valve timing; |
| IVC | Intake valve closing; |
| ISS | Input to state stable. |
Nomenclature
| Variables | |
| Cycle index; | |
| Moment of inertial, rotational speed, power, temperature; | |
| Specific heat ratio at constant pressure; | |
| Ideal gas constant, discharge coefficient; | |
| Efficiency, specific heat ratio, pressure ratio; | |
| Mass, mass rate; | |
| Volume, swept volume, valve reference area; | |
| Volumetric efficiency, stoichiometric oxygen fuel ratio; | |
| Temperature, mean temperature, pressure, mean pressure; | |
| Oxygen concentration; | |
| Ignition delay; | |
| Measurement equation of oxygen concentrations, measurement matrix; | |
| System, state, measurement, innovation covariance; | |
| Filter gain. | |
| Subscripts | |
| Variable geometry turbocharger; | |
| Compressor; | |
| Turbine; | |
| Intake manifold; | |
| Exhaust manifold; | |
| In-cylinder; | |
| The charge flows from intake manifold to cylinder; | |
| The charge flows from cylinder to exhaust manifold; | |
| Residual gas; | |
| Crank angle at intake valve closing; | |
| f | Fuel; |
| Injection; | |
| Exhaust gas recirculation; | |
| Fresh air; | |
| Engine; | |
| d | Downstream; |
| u | Upstream. |
Appendix A
References
- Noh, H.K.; No, S.Y. Effect of bioethanol on combustion and emissions in advanced CI engines: HCCI, PPC and GCI mode—A review. Appl. Energy 2017, 208, 782–802. [Google Scholar] [CrossRef]
- Krishnamoorthi, M.; Malayalamurthi, R.; He, Z.; Kandasamy, S. A review on low temperature combustion engines: Performance, combustion and emission characteristics. Renew. Sustain. Energy Rev. 2019, 116, 109404. [Google Scholar] [CrossRef]
- Yoon, S.H.; Kim, H.J.; Park, S. Study on optimal combustion strategy to improve combustion performance in a single-cylinder PCCI diesel engine with different combustion chamber geometry. Appl. Therm. Eng. 2018, 144, 1081–1090. [Google Scholar] [CrossRef]
- Park, H.; Shim, E.; Bae, C. Expansion of low-load operating range by mixture stratification in a natural gas-diesel dual-fuel premixed charge compression ignition engine. Energy Convers. Manag. 2019, 194, 186–198. [Google Scholar] [CrossRef]
- Goryntsev, D.; Sadiki, A.; Janicka, J. Analysis of misfire processes in realistic Direct Injection Spark Ignition engine using multi-cycle Large Eddy Simulation. Proc. Combust. Inst. 2013, 34, 2969–2976. [Google Scholar] [CrossRef]
- Moradi, J.; Gharehghani, A.; Mirsalim, M. Numerical investigation on the effect of oxygen in combustion characteristics and to extend low load operating range of a natural-gas HCCI engine. Appl. Energy 2020, 276, 115516. [Google Scholar] [CrossRef]
- Li, X.; Zhen, X.; Wang, Y.; Liu, D.; Tian, Z. The knock study of high compression ratio SI engine fueled with methanol in combination with different EGR rates. Fuel 2019, 257, 116098. [Google Scholar] [CrossRef]
- Zhou, L.; Dong, K.; Hua, J.; Wei, H.; Chen, R.; Han, Y. Effects of applying EGR with split injection strategy on combustion performance and knock resistance in a spark assisted compression ignition (SACI) engine. Appl. Therm. Eng. 2018, 145, 98–109. [Google Scholar] [CrossRef] [Green Version]
- Wang, J. Hybrid Robust Air-Path Control for Diesel Engines Operating Conventional and Low Temperature Combustion Modes. IEEE Trans. Control. Syst. Technol. 2008, 16, 1138–1151. [Google Scholar] [CrossRef]
- Chen, S.; Yan, F. Trapped Unburned Fuel Estimation and Robustness Analysis for a Turbocharged Diesel Engine with Negative Valve Overlap Strategy. J. Dyn. Syst. Meas. Control 2015, 137, 061004. [Google Scholar] [CrossRef]
- Desantes, J.M.; Benajes, J.; García, A.; Monsalve-Serrano, J. The role of the in-cylinder gas temperature and oxygen concentration over low load reactivity controlled compression ignition combustion efficiency. Energy 2014, 78, 854–868. [Google Scholar] [CrossRef]
- Benajes, J.; Novella, R.; García, A.; Arthozoul, S. The role of in-cylinder gas density and oxygen concentration on late spray mixing and soot oxidation processes. Energy 2011, 36, 1599–1611. [Google Scholar] [CrossRef]
- Porpatham, E.; Ramesh, A.; Nagalingam, B. Experimental studies on the effects of enhancing the concentration of oxygen in the inducted charge of a biogas fuelled spark ignition engine. Energy 2018, 142, 303–312. [Google Scholar] [CrossRef]
- Yan, F.; Wang, J. In-cylinder oxygen mass fraction cycle-by-cycle estimation via a lyapunov-based observer design. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 652–657. [Google Scholar] [CrossRef]
- Yan, F.; Wang, J. Design and Robustness Analysis of Discrete Observers for Diesel Engine In-Cylinder Oxygen Mass Fraction Cycle-by-Cycle Estimation. IEEE Trans. Control. Syst. Technol. 2012, 20, 72–83. [Google Scholar] [CrossRef]
- Zeng, X.; Wang, J. A physics-based time-varying transport delay oxygen concentration model for dual-loop exhaust gas recirculation (EGR) engine air-paths. Appl. Energy 2014, 125, 300–307. [Google Scholar] [CrossRef]
- Meyer, J.; Midlam-Mohler, S.; Yurkovich, S. In-cylinder oxygen concentration estimation for diesel engines via transport delay modeling. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 396–401. [Google Scholar] [CrossRef]
- Och, S.H.; Moura, L.M.; Mariani, V.C.; dos Santos Coelho, L.; Velásquez, J.A.; Domingues, E. Volumetric efficiency optimization of a single-cylinder D.I. diesel engine using differential evolution algorithm. Appl. Therm. Eng. 2016, 108, 660–669. [Google Scholar] [CrossRef]
- Cui, J.; Lai, H.; Li, J.; Ma, Y. Visualization of internal flow and the effect of orifice geometry on the characteristics of spray and flow field in pressure-swirl atomizers. Appl. Therm. Eng. 2017, 127, 812–822. [Google Scholar] [CrossRef]
- Finesso, R.; Hardy, G.; Maino, C.; Marello, O.; Spessa, E. A New Control-Oriented Semi-Empirical Approach to Predict Engine-Out NOx Emissions in a Euro VI 3.0 L Diesel Engine. Energies 2017, 10, 1978. [Google Scholar] [CrossRef] [Green Version]
- An, H.; Yang, W.; Li, J.; Zhou, D. Modeling study of oxygenated fuels on diesel combustion: Effects of oxygen concentration, cetane number and C/H ratio. Energy Convers. Manag. 2015, 90, 261–271. [Google Scholar] [CrossRef]
- Zhang, Y.; Huang, Z.; Wei, L.; Niu, S. Experimental and kinetic study on ignition delay times of methane/hydrogen/oxygen/nitrogen mixtures by shock tube. Chin. Sci. Bull. 2011, 56, 2853–2861. [Google Scholar] [CrossRef] [Green Version]
- Boretti, A. Conversion of a heavy duty truck diesel engine with an innovative power turbine connected to the crankshaft through a continuously variable transmission to operate compression ignition dual fuel diesel-LPG. Fuel Process. Technol. 2013, 113, 97–108. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Figure No. | Gas Mass Uncertainties | Measuring Model Errors |
|---|---|---|
| Figure 9 (DM) | No | N/A |
| Figure 10 (VM) | No | 10% drift |
| Figure 11 (DM) | Yes | N/A |
| Figure 12 (DFM) | Yes | 10% drift |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Wen, B.; Zhang, X.; Wu, K.; Wu, X.; Zhang, Y. In-Cylinder Oxygen Concentration Estimation Based on Virtual Measurement and Data Fusion Algorithm for Turbocharged Diesel Engines. Appl. Sci. 2021, 11, 7594. https://doi.org/10.3390/app11167594
Zhang Q, Wen B, Zhang X, Wu K, Wu X, Zhang Y. In-Cylinder Oxygen Concentration Estimation Based on Virtual Measurement and Data Fusion Algorithm for Turbocharged Diesel Engines. Applied Sciences. 2021; 11(16):7594. https://doi.org/10.3390/app11167594
Chicago/Turabian StyleZhang, Qi, Bin Wen, Xuemei Zhang, Kai Wu, Xinyu Wu, and Yinyou Zhang. 2021. "In-Cylinder Oxygen Concentration Estimation Based on Virtual Measurement and Data Fusion Algorithm for Turbocharged Diesel Engines" Applied Sciences 11, no. 16: 7594. https://doi.org/10.3390/app11167594