
Dynamic Analysis of Ball Screw Feed System with the Effects of Excitation Amplitude and Design Parameters

Abstract
:1. Introduction
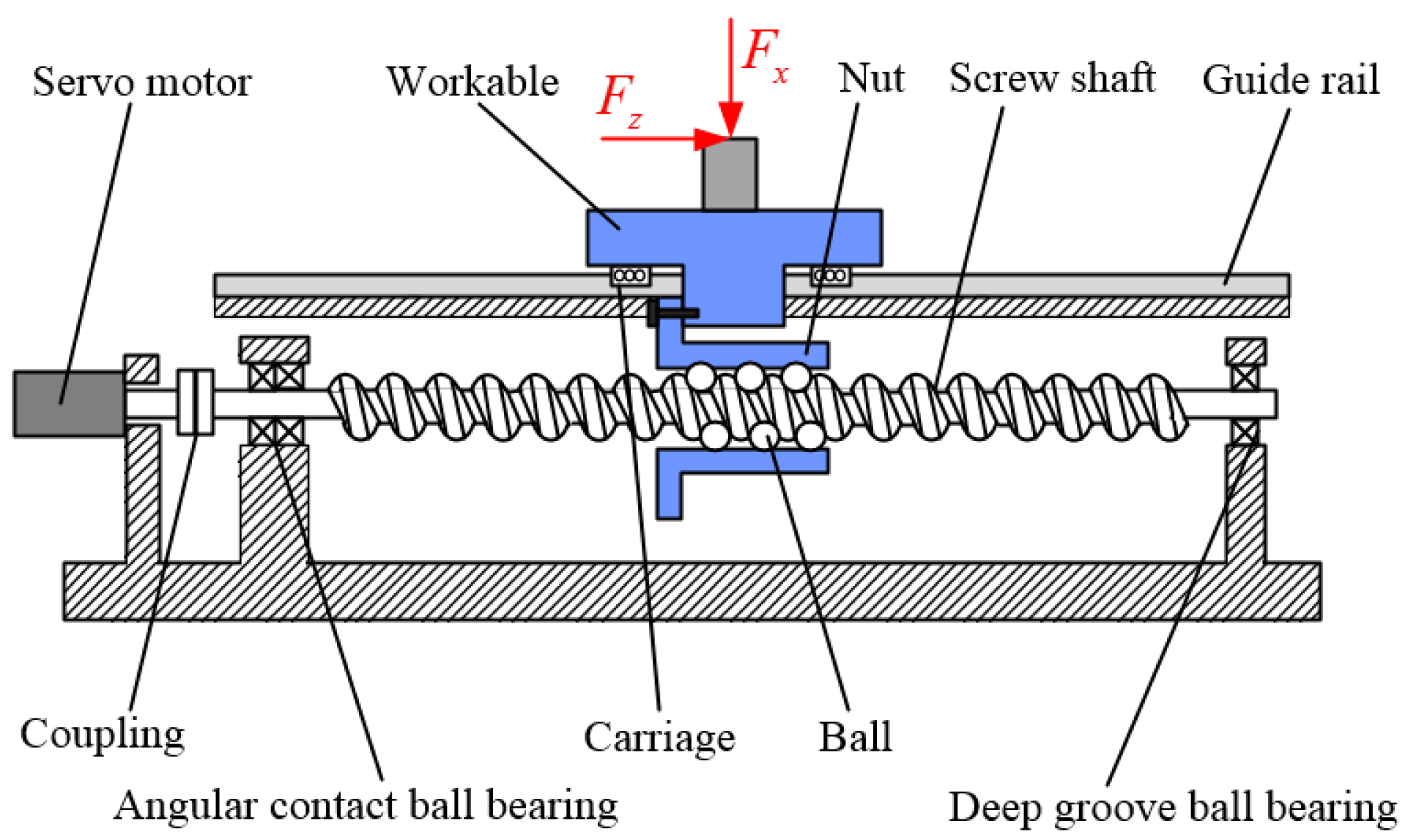
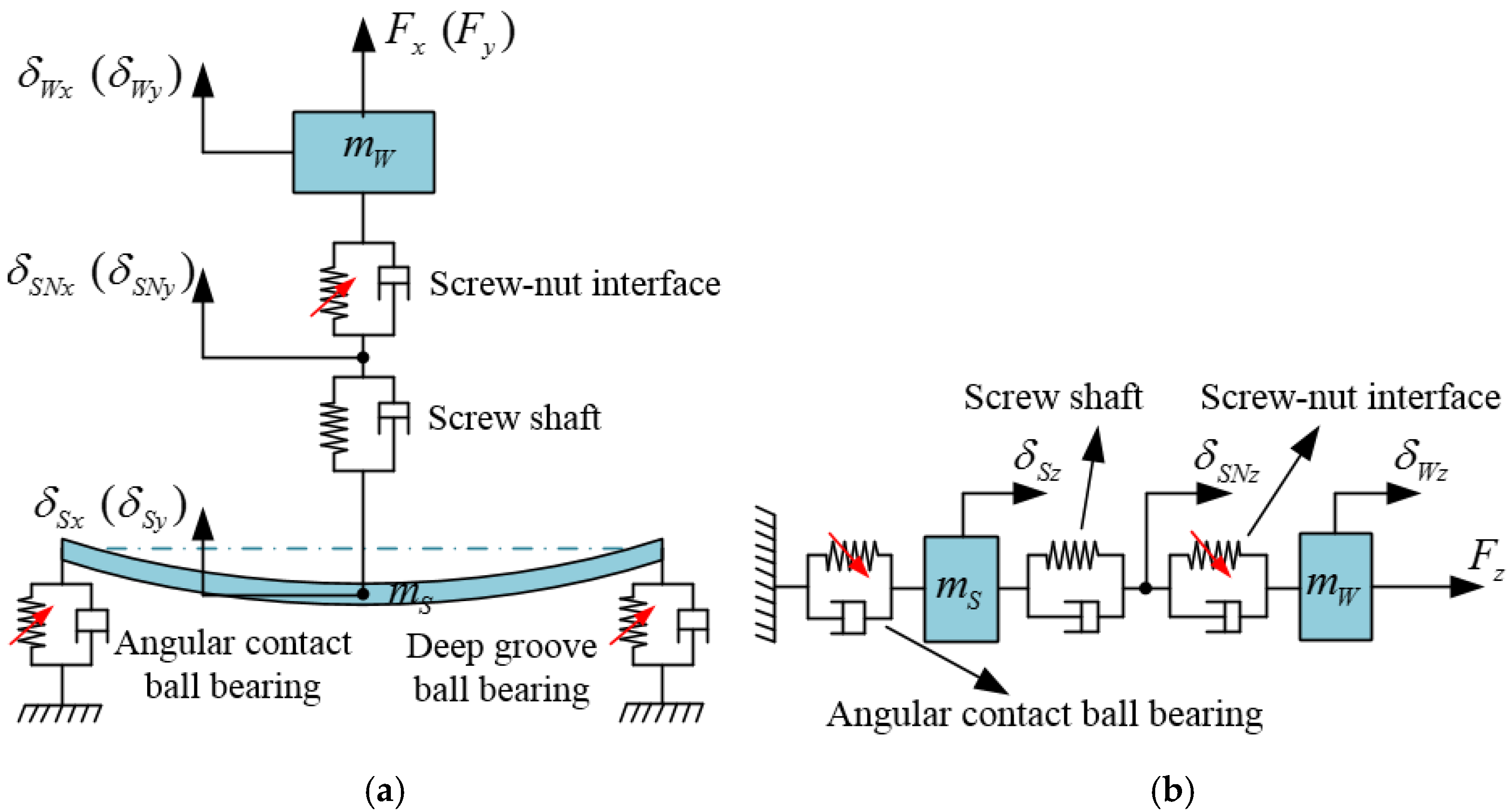
2. Dynamic Model of the Feed System
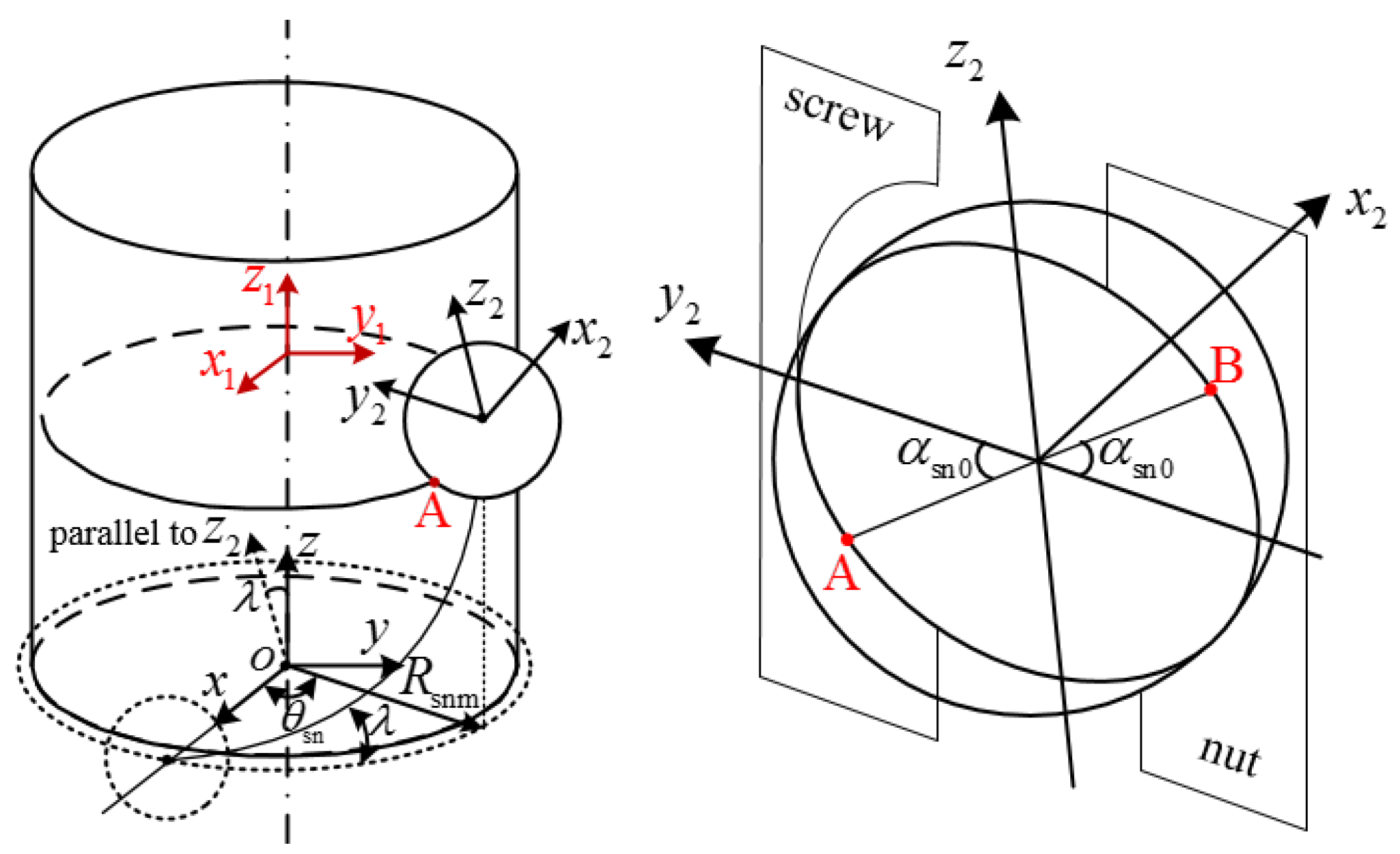
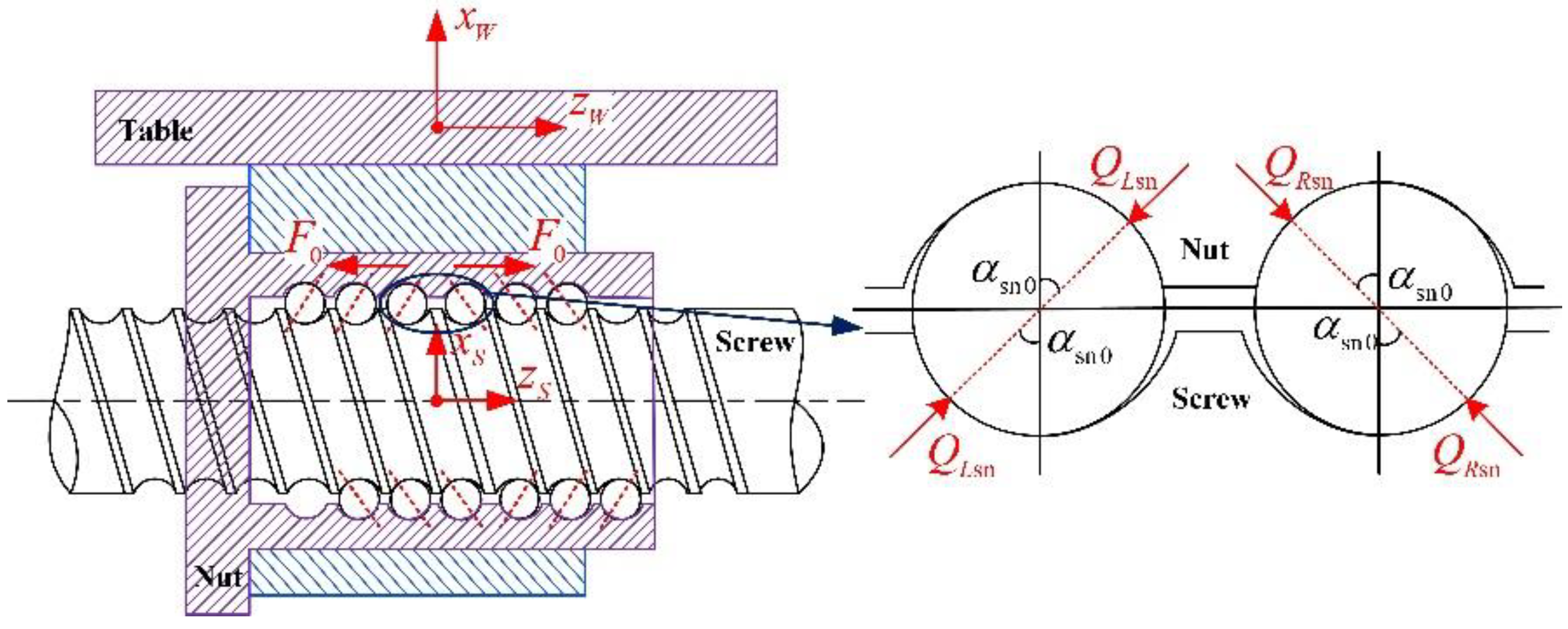
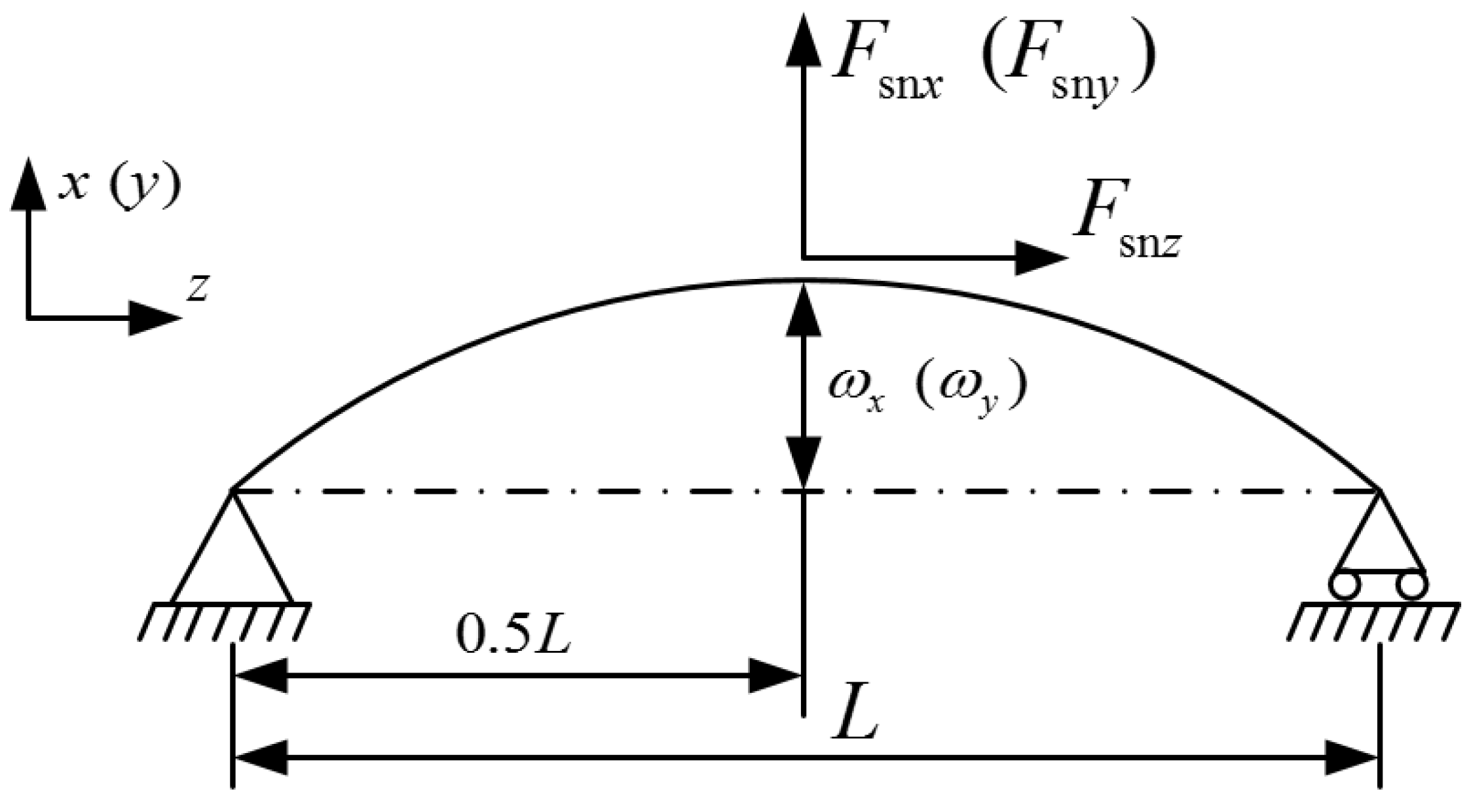
2.1. Calculation of Restoring Force for Ball Screw
2.1.1. Restoring Force for the Screw-Nut Left Section
2.1.2. Restoring Force for the Screw-Nut Right Section
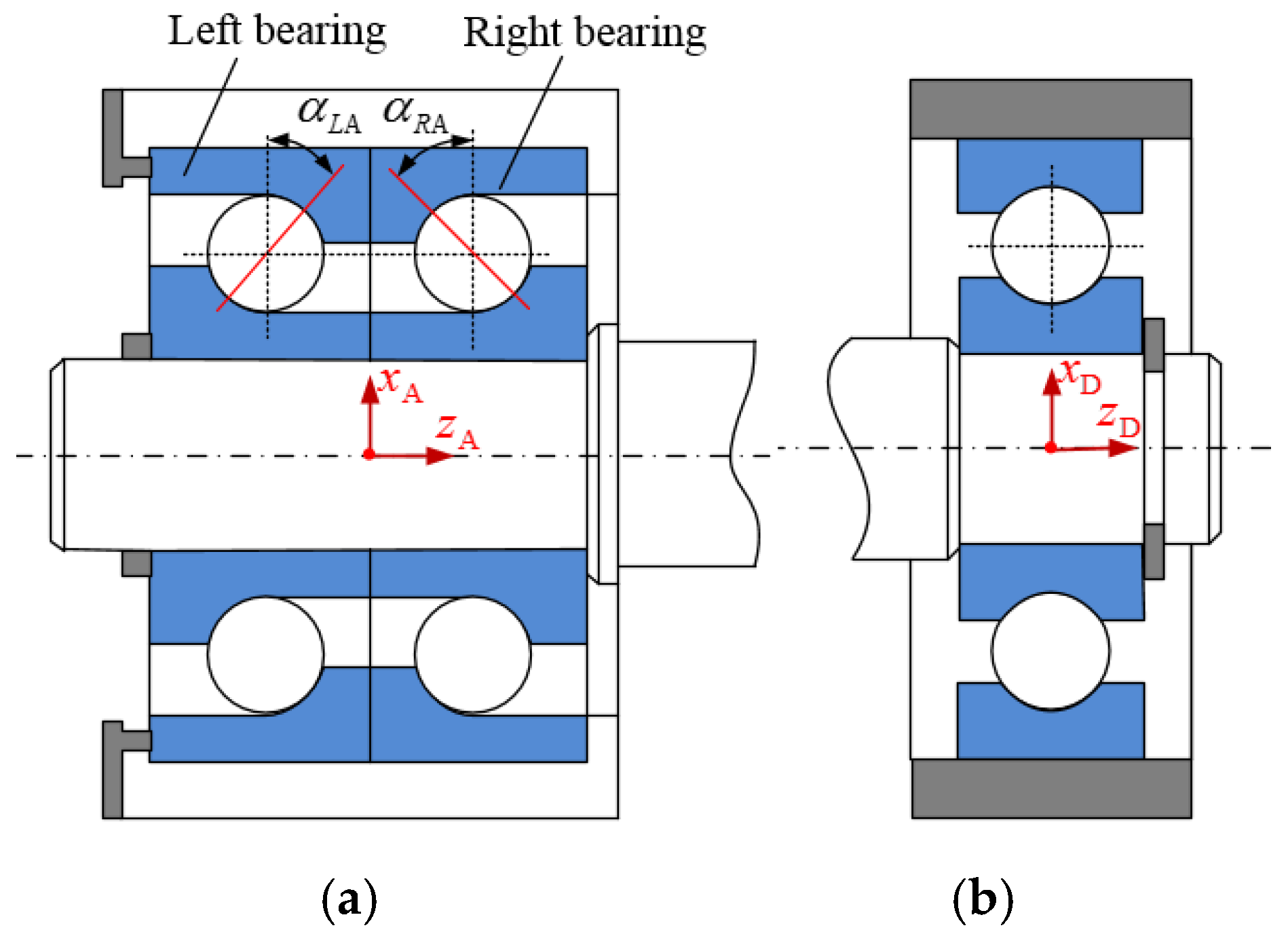
2.2. Calculation of Restoring Force of Bearings
2.2.1. Restoring Force of Angular Contact Ball Bearing
2.2.2. Restoring Force of Deep Groove Ball Bearing
2.3. Stiffness of Screw Shaft
2.4. Dynamic Equations of Ball Screw System
3. Results and Discussion
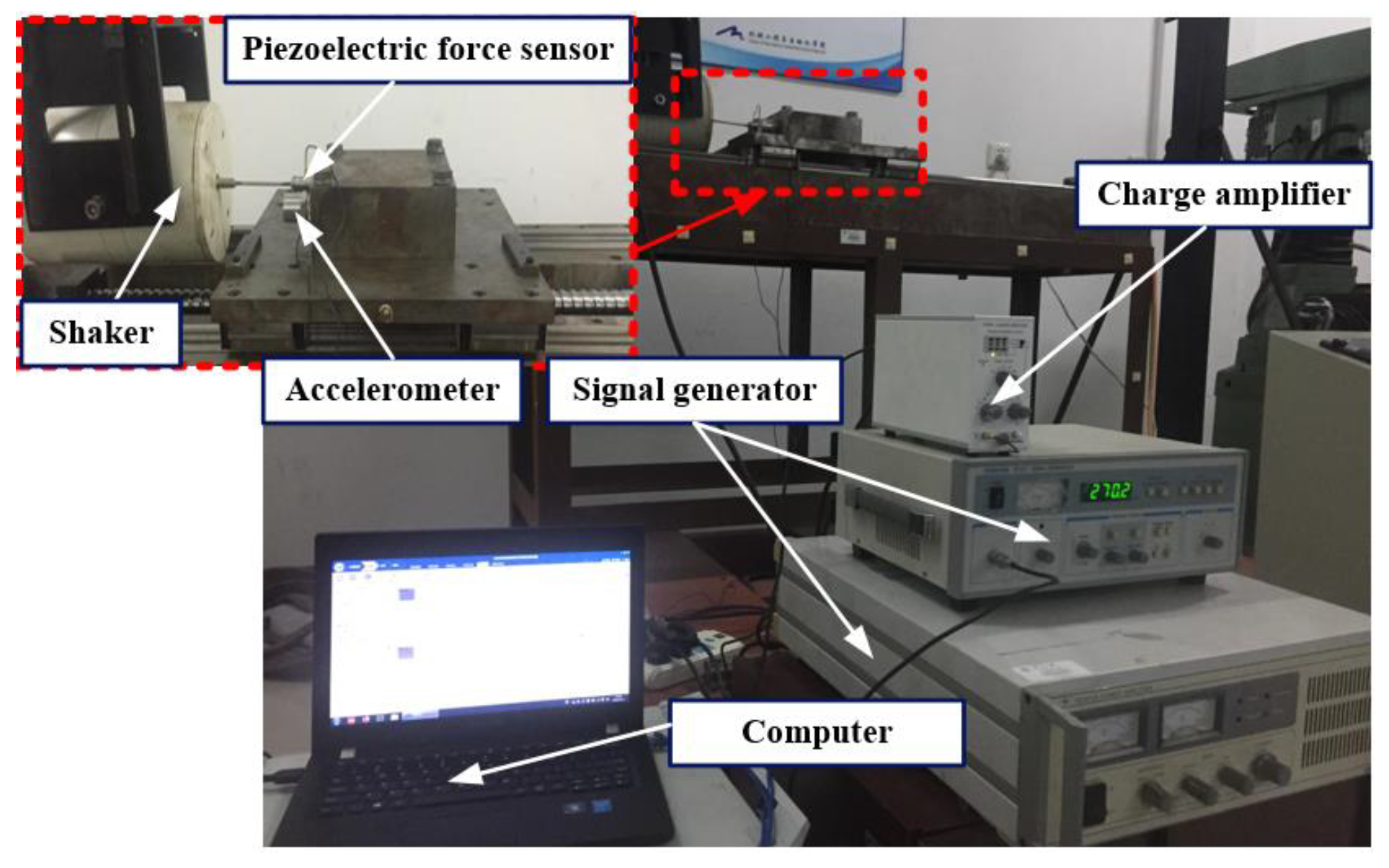
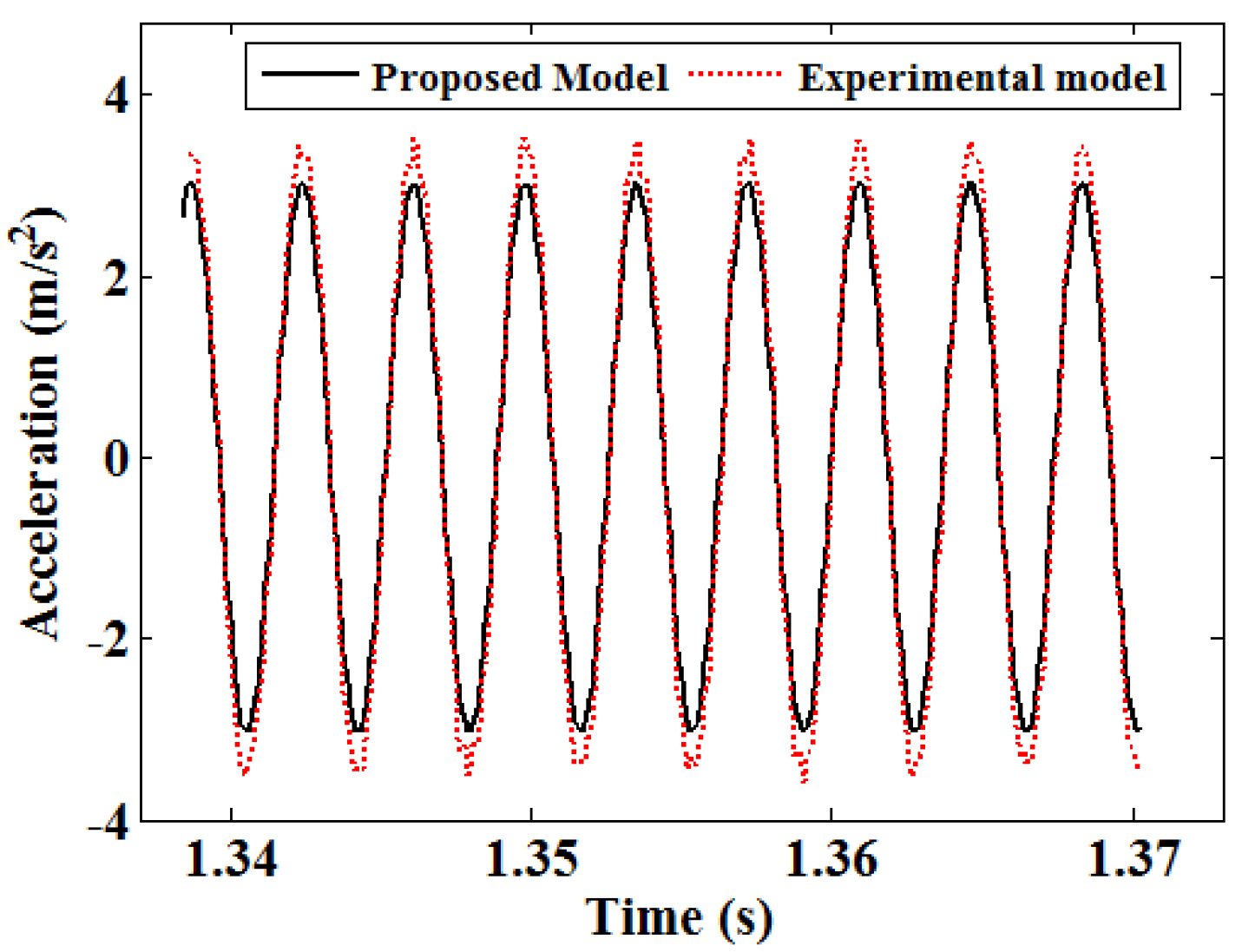
3.1. Experimental Verification
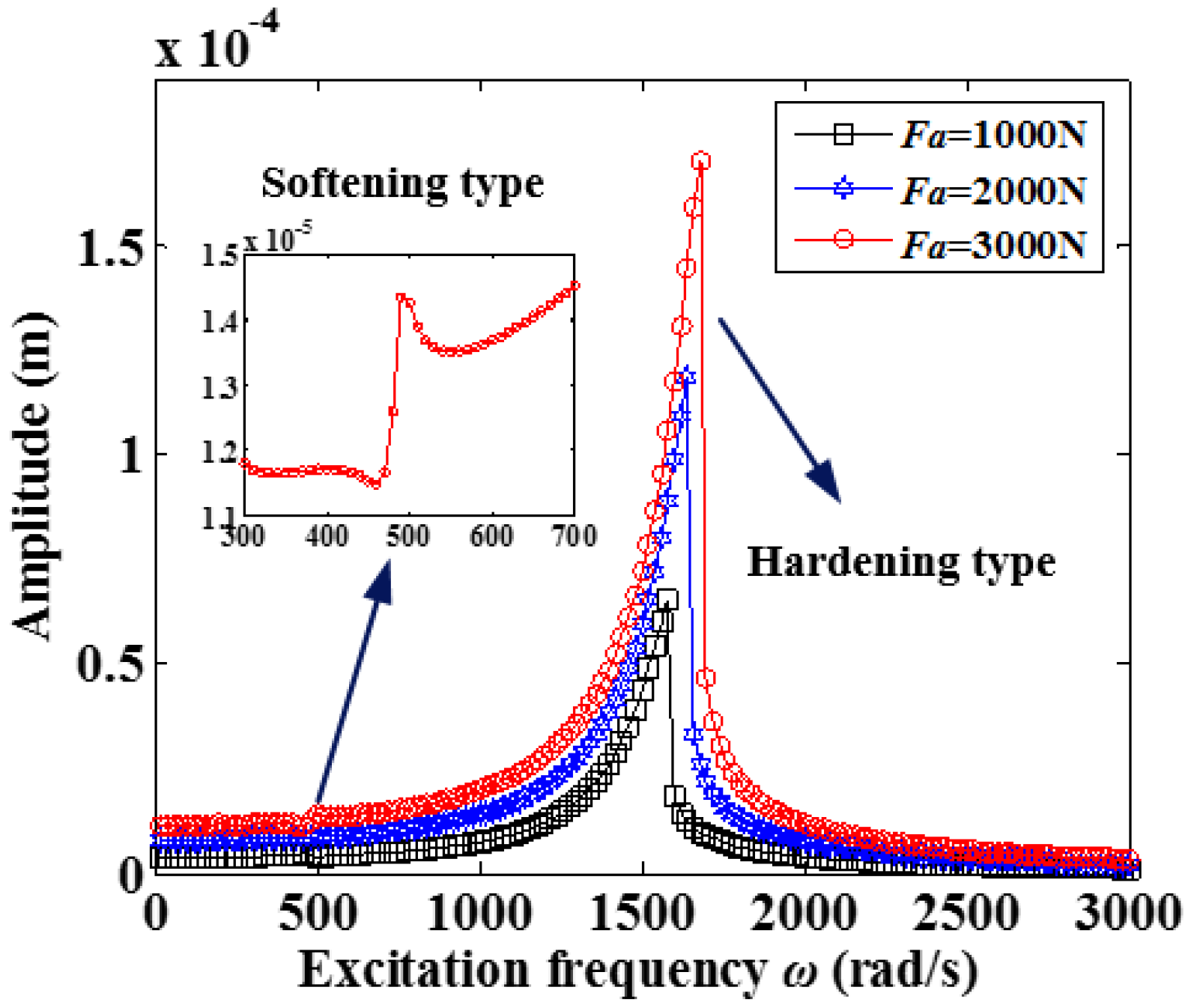
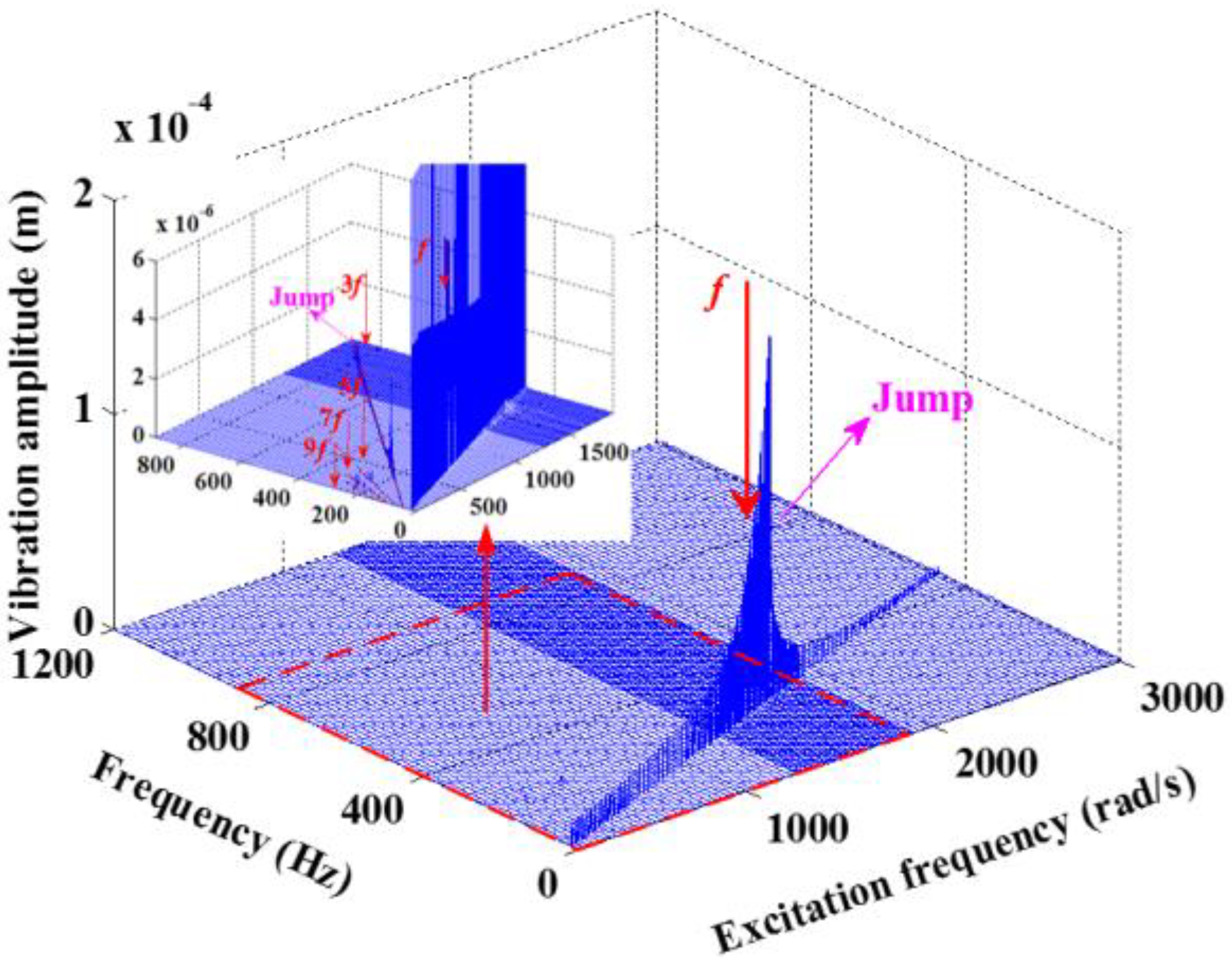
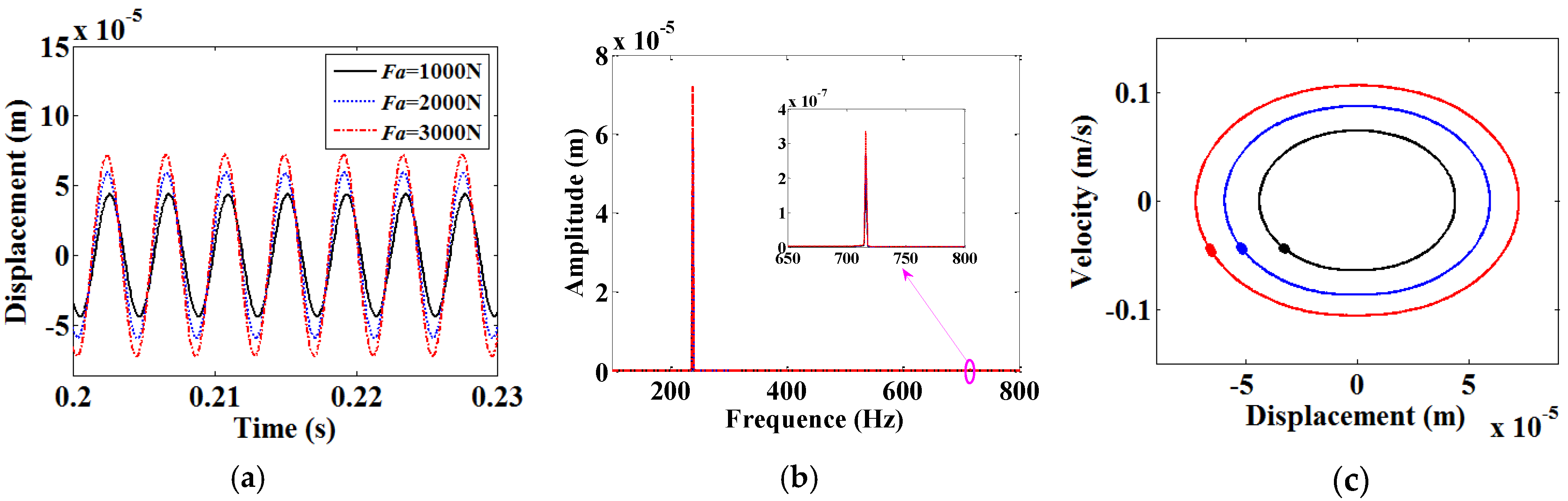
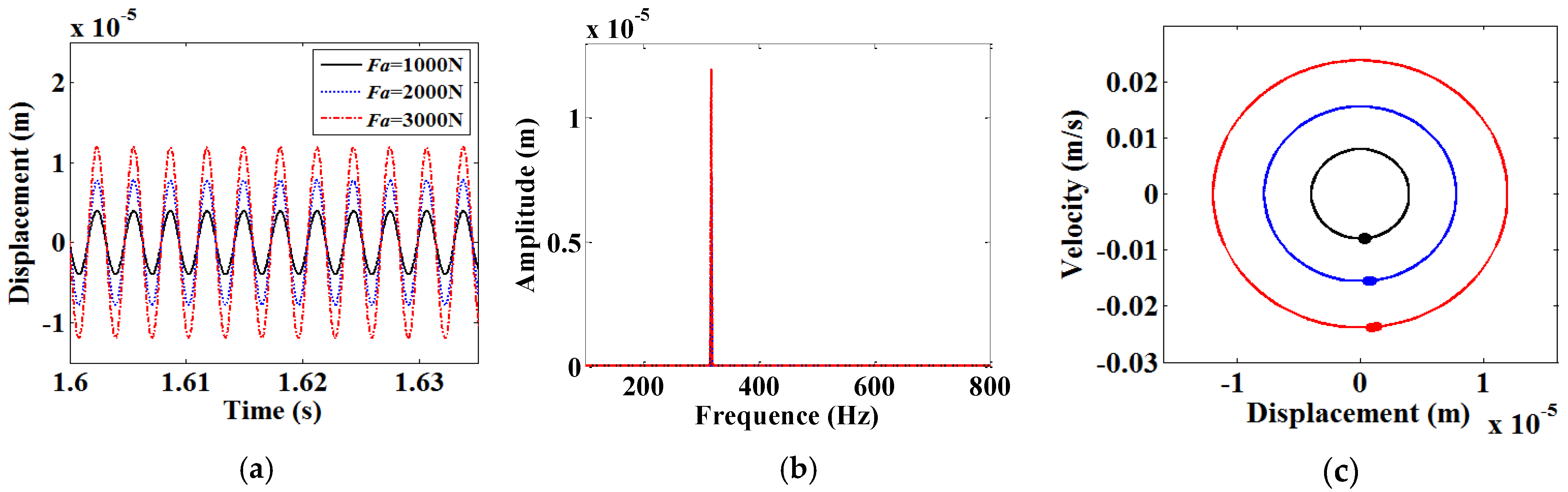
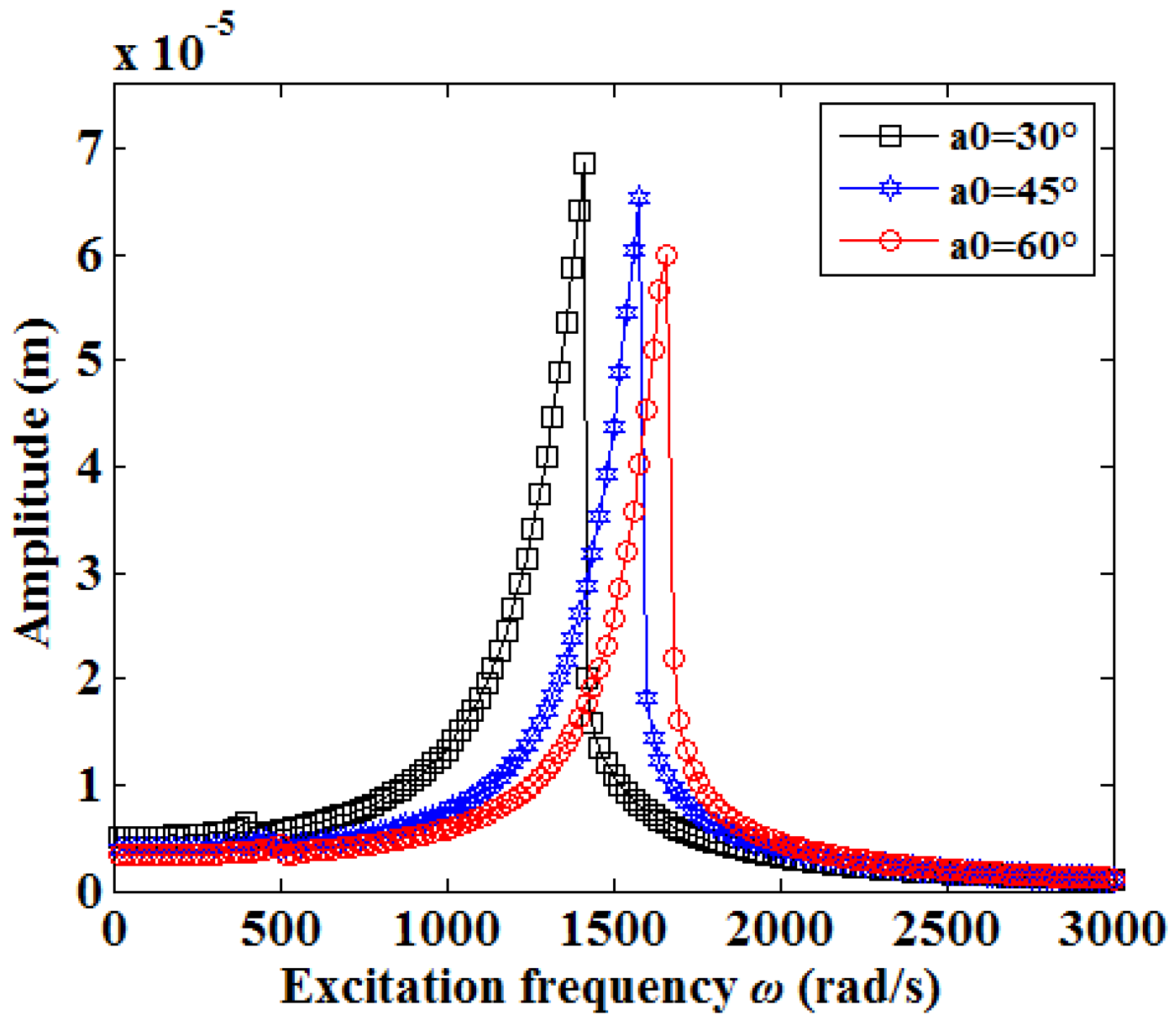
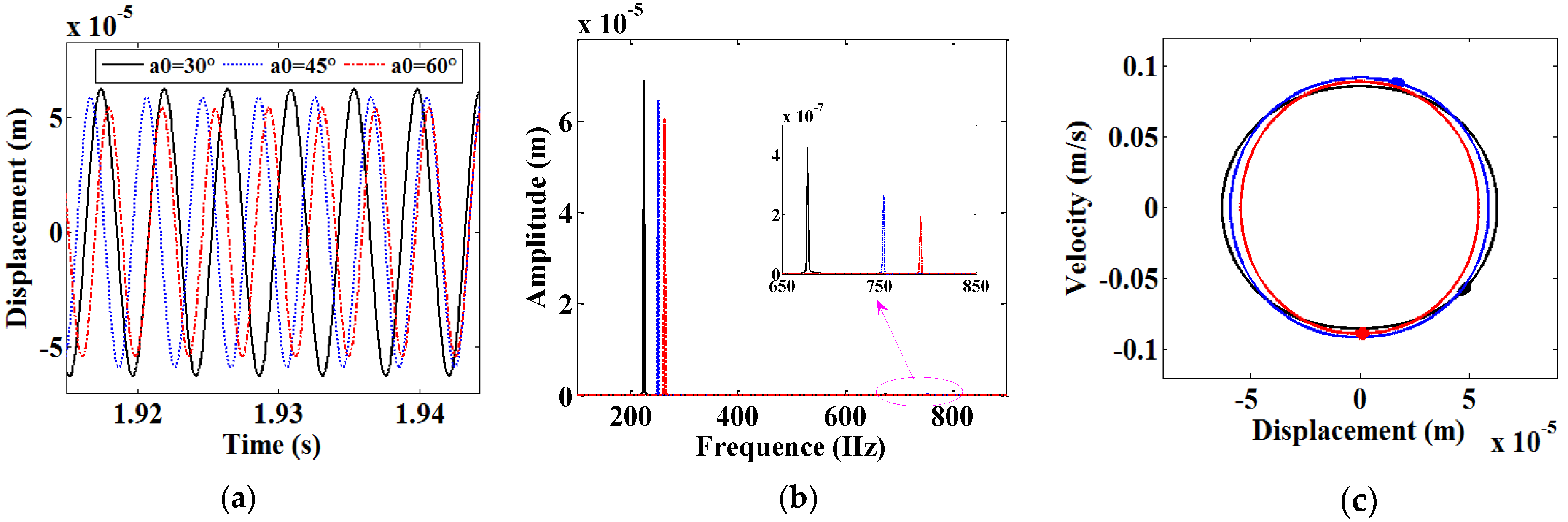
3.2. Effects of Axial Excitation Amplitude on Axial Vibration of the Feed System
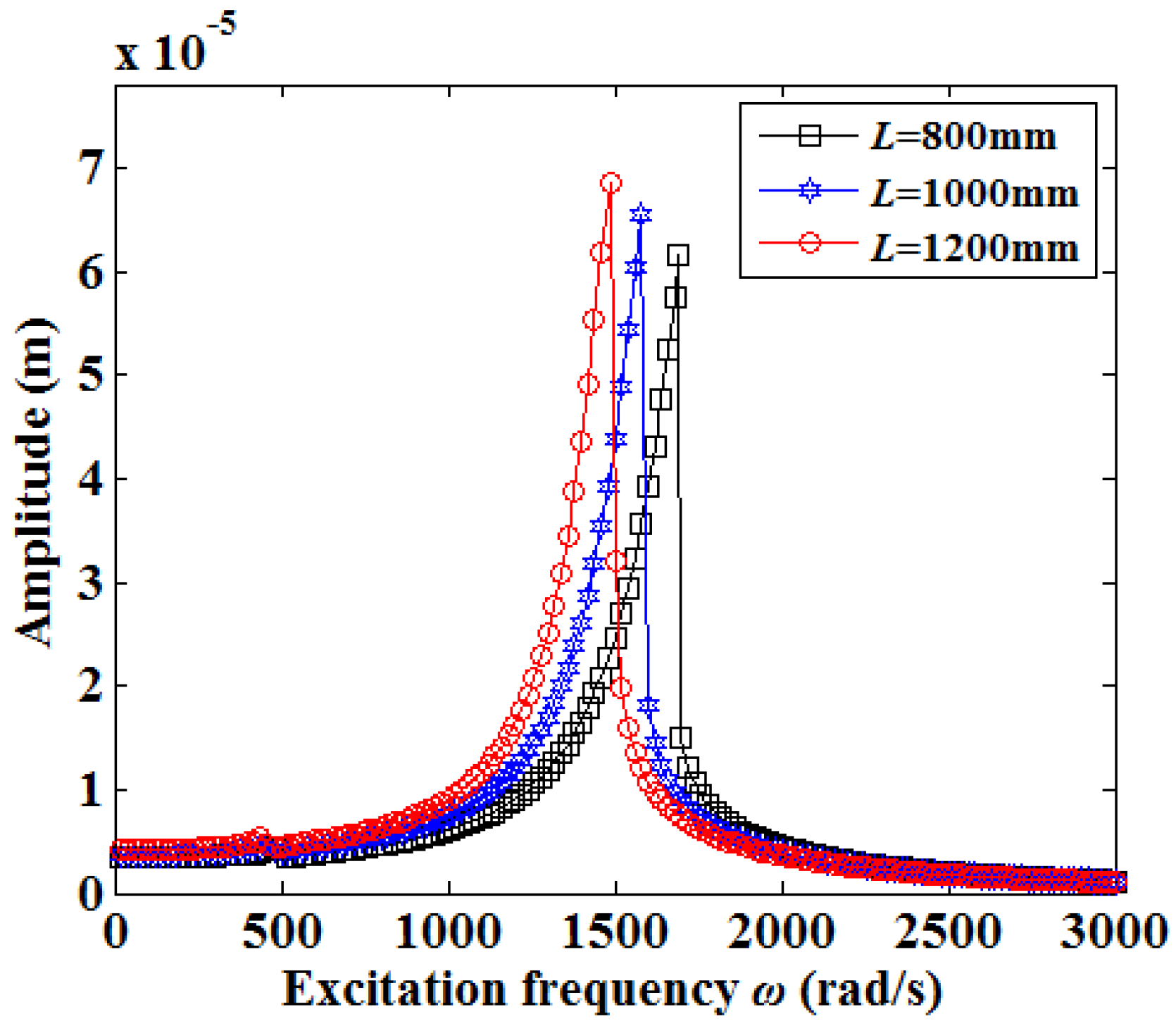
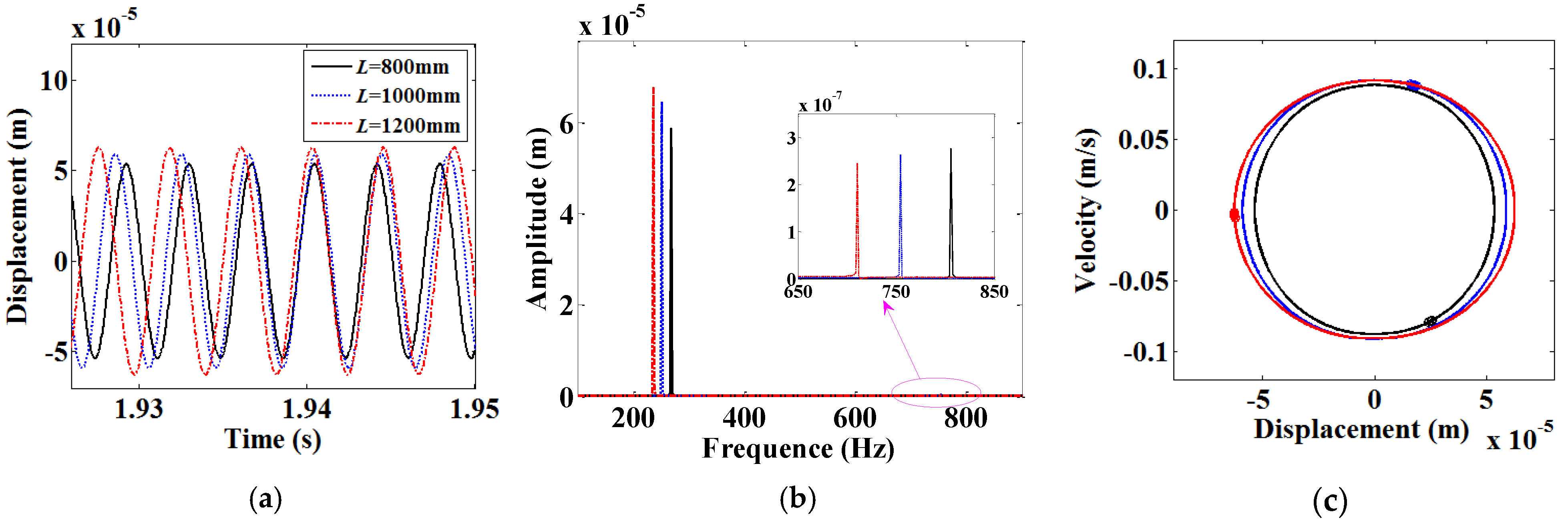
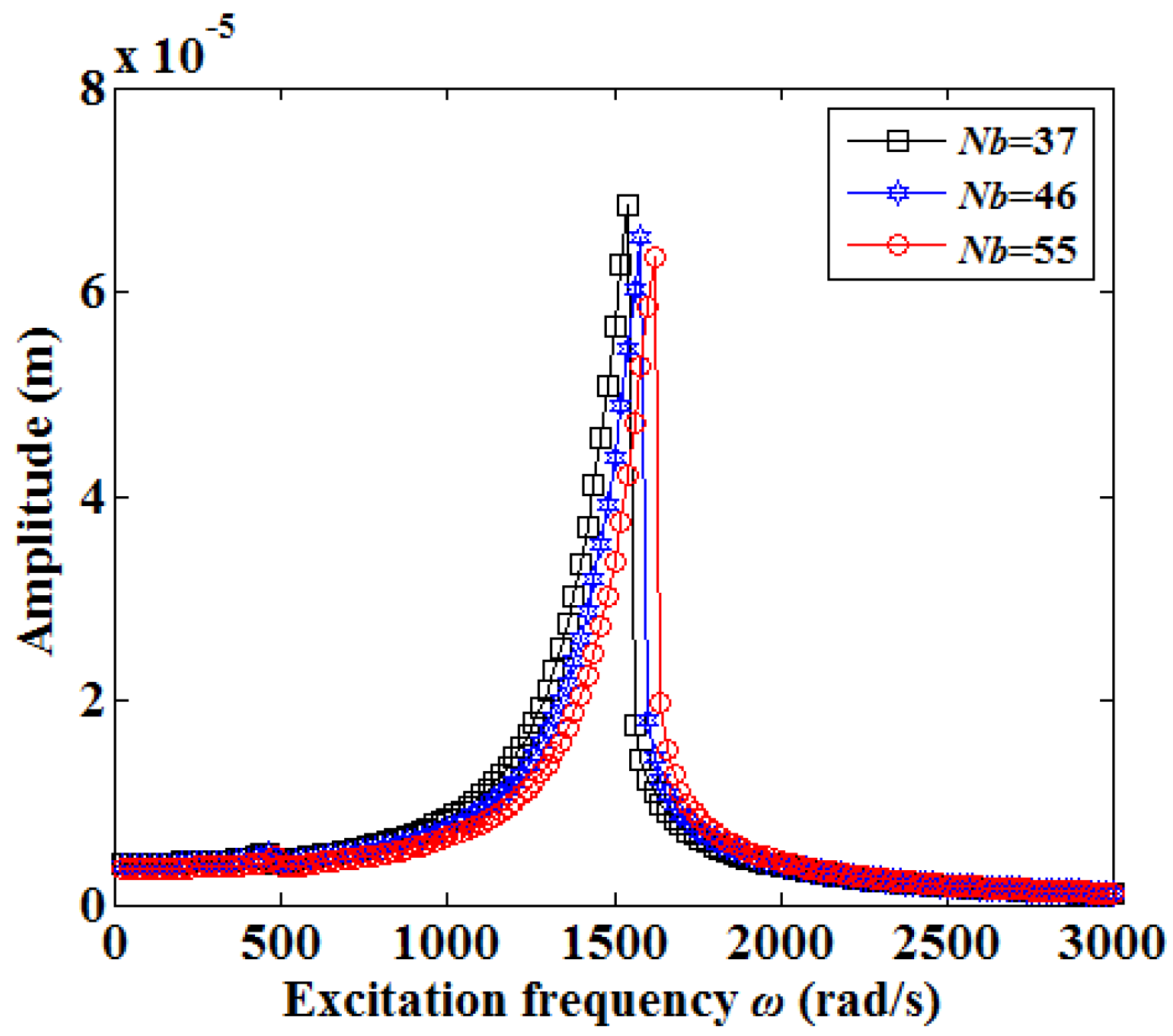
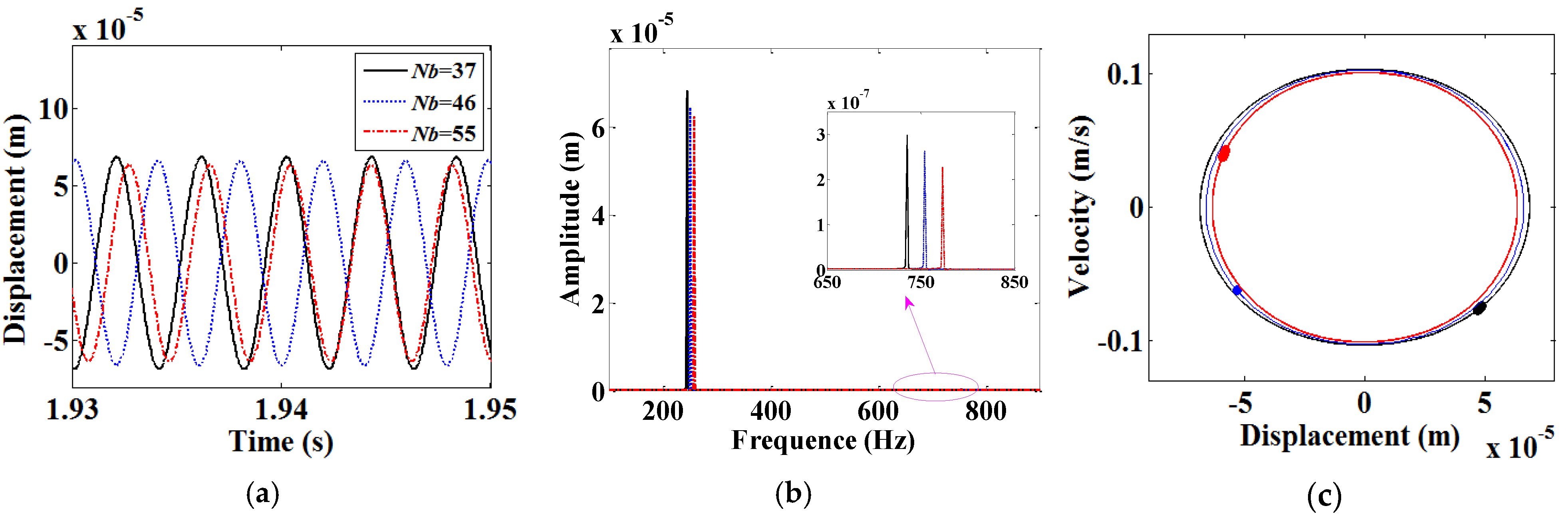
3.3. Effects of Design Parameters on Axial Vibration of the Feed System
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, S.J.; Wang, S.S. Mechatronics and control of a long-range nanometer positioning servomechanism. Mechatronics 2009, 19, 14–28. [Google Scholar] [CrossRef]
- Zhou, C.G.; Feng, H.T.; Chen, Z.T.; Ou, Y. Correlation between preload and no-load drag torque of ball screws. Int. J. Mach. Tools Manuf. 2016, 102, 35–40. [Google Scholar] [CrossRef]
- Fukada, S.; Fang, B.; Shigeno, A. Experimental analysis and simulation of nonlinear microscopic behavior of ball screw mechanism for ultra-precision positioning. Precis. Eng. 2011, 35, 650–668. [Google Scholar] [CrossRef]
- Li, B.; Luo, B.; Mao, X.Y.; Cai, H.; Peng, F.Y.; Liu, H.Q. A new approach to identifying the dynamic behavior of CNC machine tools with respect to different worktable feed speeds. Int. J. Mach. Tools Manuf. 2012, 72, 73–84. [Google Scholar] [CrossRef]
- Mi, L.; Yin, G.F.; Sun, M.N.; Wang, X.H. Effects of preloads on joints on dynamic stiffness of a whole machine tool structure. J. Mech. Sci. Technol. 2012, 26, 495–508. [Google Scholar] [CrossRef]
- Zou, C.; Zhang, H.; Lu, D.; Zhang, J.; Zhao, W. Effect of the screw-nut joint stiffness on the position-dependent dynamics of a vertical ball screw feed system without counterweight. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 232, 2599–2609. [Google Scholar] [CrossRef]
- Gu, J.; Zhang, Y.; Liu, H. Influences of wear on dynamic characteristics of angular contact ball bearings. Meccanica 2019, 54, 945–965. [Google Scholar] [CrossRef]
- Mei, X.; Tsutsumi, M.; Tao, T.; Sun, N. Study on the load distribution of ball screws with errors. Mech. Mach. Theory 2003, 38, 1257–1269. [Google Scholar] [CrossRef]
- Bertolaso, R.; Cheikh, M.; Barranger, Y.; Dupré, J.C.; Germaneau, A.; Doumalin, P. Experimental and numerical study of the load distribution in a ball-screw system. J. Mech. Sci. Technol. 2014, 28, 1411–1420. [Google Scholar] [CrossRef]
- Lin, B.; Okwudire, C.E.; Wou, J.S. Low order static load distribution model for ball screw mechanisms including effects of lateral deformation and geometric errors. ASME J. Mech. Des. 2017, 140, 022301. [Google Scholar] [CrossRef]
- Zhen, N.; An, Q. Analysis of stress and fatigue life of ball screw with considering the dimension errors of balls. Int. J. Mech. Sci. 2018, 137, 68–76. [Google Scholar] [CrossRef]
- Zhao, J.J.; Lin, M.X.; Song, X.C.; Guo, Q.Z. Investigation of load distribution and deformations for ball screws with the effects of turning torque and geometric errors. Mech. Mach. Theory 2019, 141, 95–116. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, C.Y.; Meng, X.L.; Wen, B.C. Static load distribution analysis of ball screws with nut position variation. Mech. Mach. Theory 2020, 151, 103893. [Google Scholar] [CrossRef]
- Lin, M.C.; Velinsky, S.A.; Ravani, B. Design of the ball screw mechanism for optimal efficiency. ASME J. Mech. Des. 1994, 116, 856–861. [Google Scholar] [CrossRef]
- Lin, M.C.; Ravani, B.; Velinsky, S.A. Kinematics of the ball screw mechanism. ASME J. Mech. Des. 1994, 116, 849–855. [Google Scholar] [CrossRef]
- Wei, C.C.; Lin, J.F.; Horng, J.H. Analysis of a ball screw with a preload and lubrication. Tribol. Int. 2009, 42, 1816–1831. [Google Scholar] [CrossRef]
- Wei, C.C.; Lai, R.S. Kinematical analyses and transmission efficiency of a preloaded ball screw operating at high rotational speeds. Mech. Mach. Theory 2011, 46, 80–898. [Google Scholar] [CrossRef]
- Wei, C.C.; Liou, W.L.; Lai, R.S. Wear analysis of the offset type preloaded ball-screw operating at high speed. Wear 2012, 292–293, 111–123. [Google Scholar] [CrossRef]
- Chen, Y.J.; Tang, W. Dynamic contact stiffness analysis of a double-nut ball screw based on a quasi-static method. Mech. Mach. Theory 2014, 73, 76–90. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Ro, S.K.; Park, J.K. Study of ball screw system preload monitoring during operation based on the motor current and screw-nut vibration. Mech. Syst. Signal Proc. 2019, 131, 18–32. [Google Scholar] [CrossRef]
- Deng, C.Y.; Yin, G.F.; Fang, H.; Meng, Z.Y. Dynamic characteristics optimization for a whole vertical machining center based on the configuration of joint stiffness. Int. J. Adv. Manuf. Technol. 2015, 76, 1225–1242. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, X.; Zhang, J.; Zhao, W. Analysis of lead screw pre-stretching influences on the natural frequency of ball screw feed system. Precis. Eng. 2019, 57, 30–44. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, H.; Du, C.; Zhao, W. Research on the dynamics of ball screw feed system with high acceleration. Int. J. Mach. Tools Manuf. 2016, 111, 9–16. [Google Scholar] [CrossRef]
- Vicente, D.A.; Hecker, R.L.; Villegas, F.J.; Flores, G.M. Modeling and vibration mode analysis of a ball screw drive. Int. J. adv. Manuf. Technol. 2012, 58, 257–266. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, J.; Liu, H.; Liang, T.; Zhao, W. Dynamic modeling and analysis of the high-speed ball screw feed system. Pro. Instit. Mech. Eng. Part B-J. Eng. Manuf. 2014, 229, 870–877. [Google Scholar] [CrossRef]
- Gu, J.; Zhang, Y. Dynamic analysis of a ball screw feed system with time-varying and piecewise-nonlinear stiffness. Proc. Inst. Mech. Eng. Part C-J. Mech. Eng. Sci. 2019, 233, 6503–6518. [Google Scholar] [CrossRef]
- Xu, M.T.; Cai, B.; Li, C.Y.; Zhang, H.Z.; Liu, Z.D.; He, D.; Zhang, Y.M. Dynamic characteristics and reliability analysis of ball screw feed system on a lathe. Mech. Mach. Theory 2020, 150, 103890. [Google Scholar] [CrossRef]
- Okwudire, C.E.; Altintas, Y. Hybrid modeling of ball screw drives with coupled axial, torsional, and lateral dynamics. ASME J. Mech. Des. 2009, 131, 071002. [Google Scholar] [CrossRef]
- Okwudire, C.E. Improved screw-nut interface model for high-performance ball screw drives. ASME J. Mech. Des. 2011, 133, 041009. [Google Scholar] [CrossRef]
- Hung, J.P.; Lai, Y.L.; Lin, C.Y.; Lo, T.L. Modeling the machining stability of a vertical milling machine under the influence of the preloaded linear guide. Int. J. Mach. Tools Manuf. 2011, 51, 731–739. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, T.; Wang, G.; Tian, S. Hybrid dynamic modeling and analysis of a ball-screw-drive spindle system. J. Mech. Sci. Technol. 2017, 31, 4611–4618. [Google Scholar] [CrossRef]
- Wang, W.; Zhou, Y.; Wang, H.; Li, C.Y.; Zhang, Y.M. Vibration analysis of a coupled feed system with nonlinear kinematic joints. Mech. Mach. Theory 2019, 134, 562–581. [Google Scholar] [CrossRef]
- Liu, C.; Zhao, C.Y.; Wen, B.C. Investigation on coupled vibration of machine tool table system with position deviations. Int. J. Adv. Manuf. Technol. 2021, 114, 2321–2337. [Google Scholar] [CrossRef]
- Varanasi, K.K.; Nayfeh, S.A. The Dynamics of lead-screw drives: Low-order modeling and experiments. ASME J. Dyn. Syst. Meas. Control 2004, 126, 388–396. [Google Scholar] [CrossRef]
- Gordon, D.J.; Erkorkmaz, K. Accurate control of ball screw drives using pole-placement vibration damping and a novel trajectory prefilter. Precis. Eng. 2013, 37, 308–322. [Google Scholar] [CrossRef]
- Wang, M.; Zan, T.; Gao, X.; Li, S. Suppression of the time-varying vibration of ball screws induced from the continuous movement of the nut using multiple tuned mass dampers. Int. J. Mach. Tools Manuf. 2016, 107, 41–49. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Ball diameter | 7.14 mm |
| Initial contact angle | 45° |
| Length of screw shaft | 1000 mm |
| Number of loaded balls | 46 |
| Shear modulus | 206 GPa |
| Preload | 300 N |
| Mass of screw shaft | 10.6 kg |
| Pitch diameter | 42 mm |
| Lead | 16 mm |
| Circle of loaded balls | 2.5 |
| Mass of worktable | 58 kg |
| Parameter | Value |
|---|---|
| Ball diameter | 8.8 mm |
| Initial contact angle | 40° |
| Number of loaded balls | 13 |
| Shear modulus | 206 GPa |
| Preload | 290 N |
| Pitch diameter | 23 mm |
| Poisson’s ratio | 0.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Zhao, C.; Liu, Z.; Wang, S. Dynamic Analysis of Ball Screw Feed System with the Effects of Excitation Amplitude and Design Parameters. Appl. Sci. 2021, 11, 7070. https://doi.org/10.3390/app11157070
Liu C, Zhao C, Liu Z, Wang S. Dynamic Analysis of Ball Screw Feed System with the Effects of Excitation Amplitude and Design Parameters. Applied Sciences. 2021; 11(15):7070. https://doi.org/10.3390/app11157070
Chicago/Turabian StyleLiu, Chang, Chunyu Zhao, Zhendong Liu, and Shuai Wang. 2021. "Dynamic Analysis of Ball Screw Feed System with the Effects of Excitation Amplitude and Design Parameters" Applied Sciences 11, no. 15: 7070. https://doi.org/10.3390/app11157070