
Digital Twin Modeling of a Solar Car Based on the Hybrid Model Method with Data-Driven and Mechanistic


Abstract
:Featured Application
Abstract
1. Introduction
- In this paper, the energy consumption and operation of each component of the solar car are significantly stimulated with the DT technology, and then a mature architecture of the whole vehicle energy consumption is established accordingly.
- A new DT framework based on a hybrid modeling approach coupled with SVM techniques is proposed to address the solar car energy consumption problem. This framework can effectively combine mechanistic and data-driven modeling to improve the accuracy of DT systems.
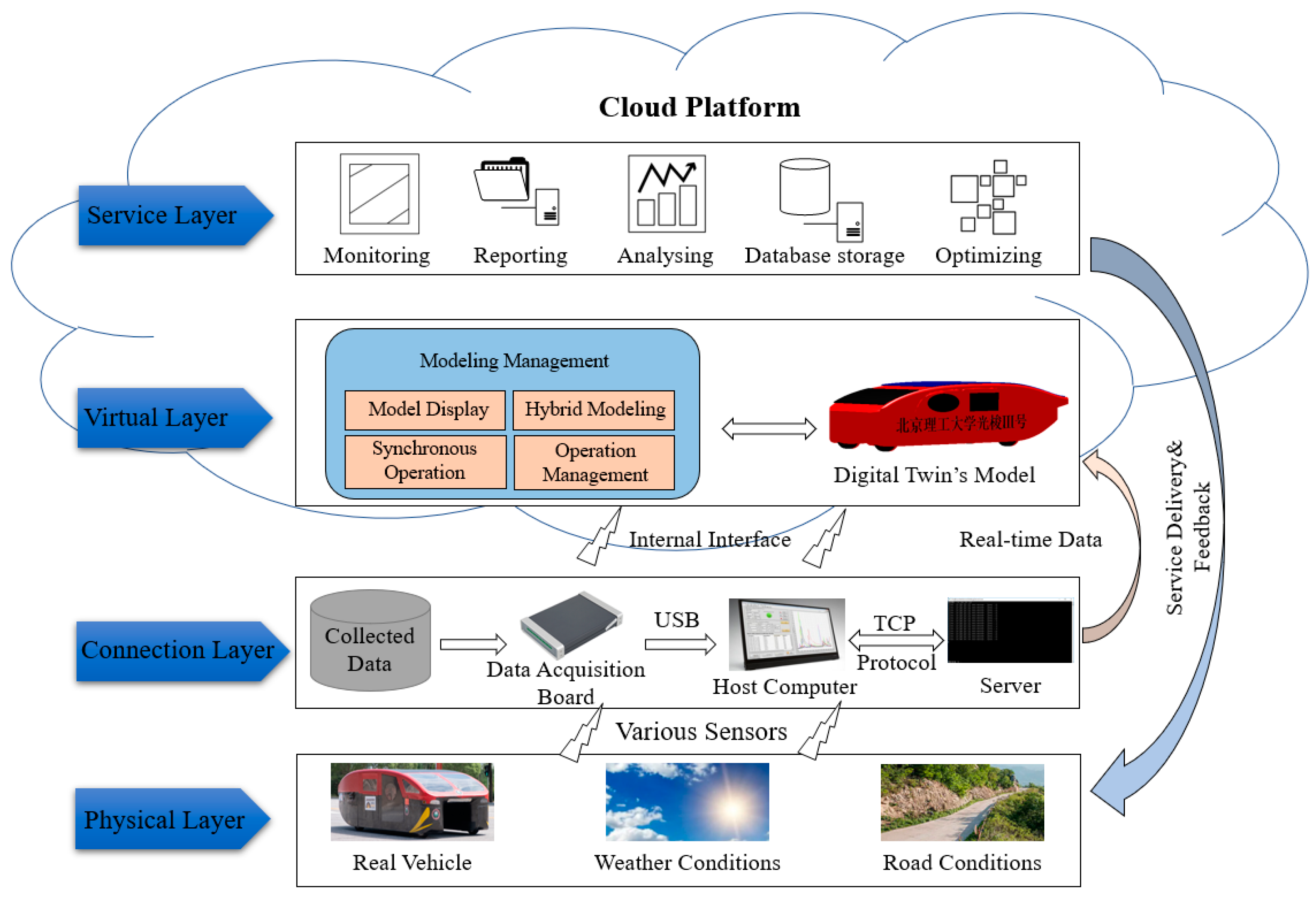
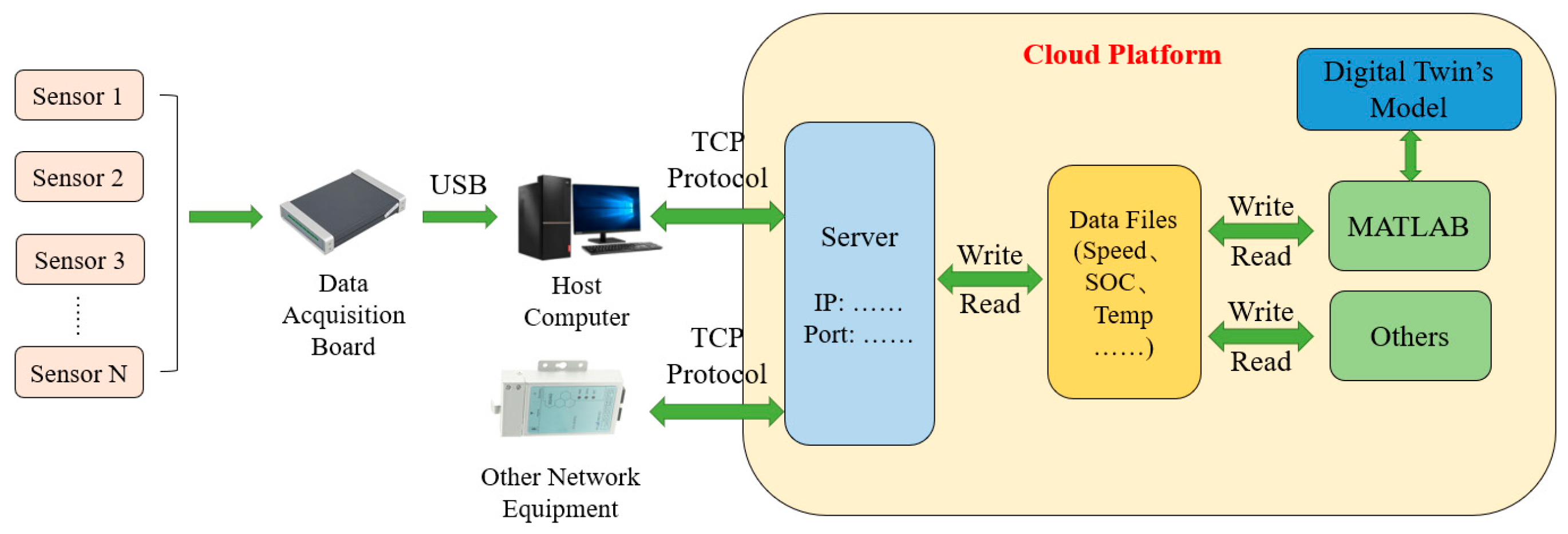
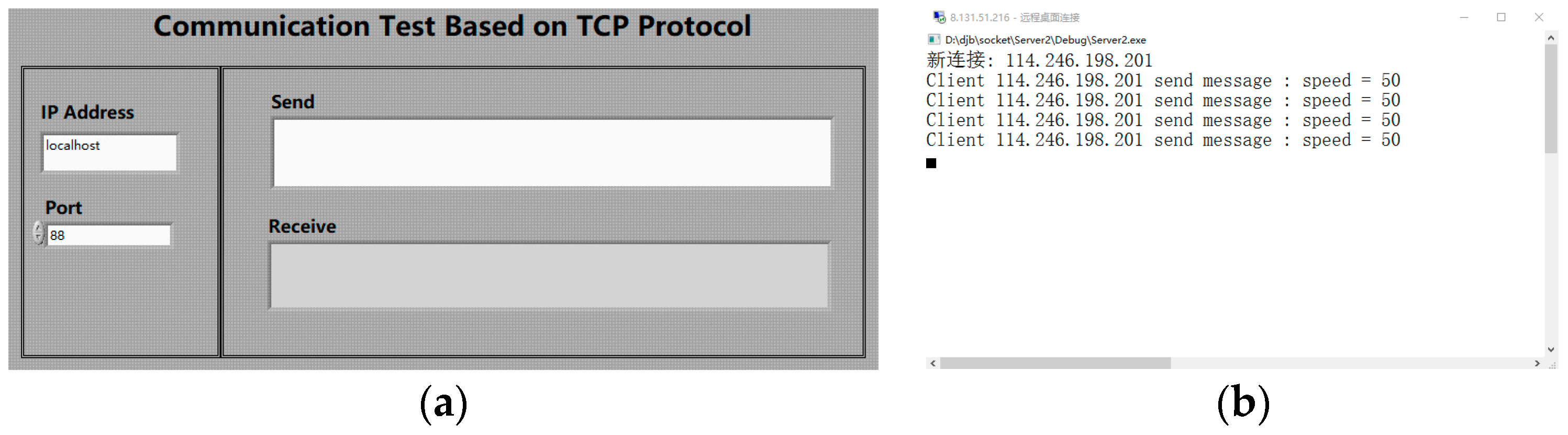
- This study deploys a cloud server based with Transmission Control Protocol (TCP) to achieve real-time data acquisition and interaction between the real solar car and the DT system.
2. Architecture of the DT System of Solar Car
3. Construction of the DT Model
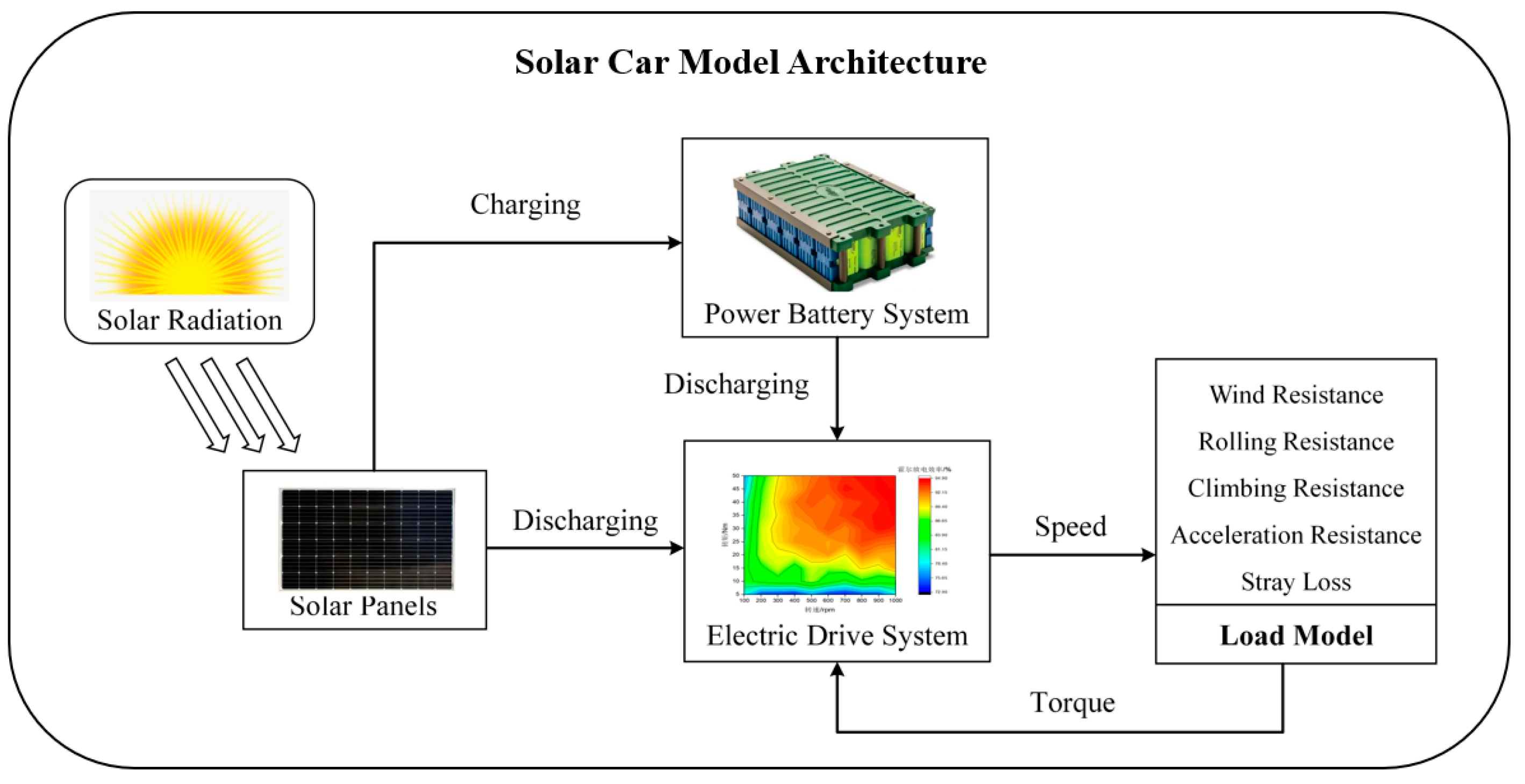
3.1. Solar Car Modeling Ideas
3.2. Mechanism Modeling: PV Cell and Electric Drive System
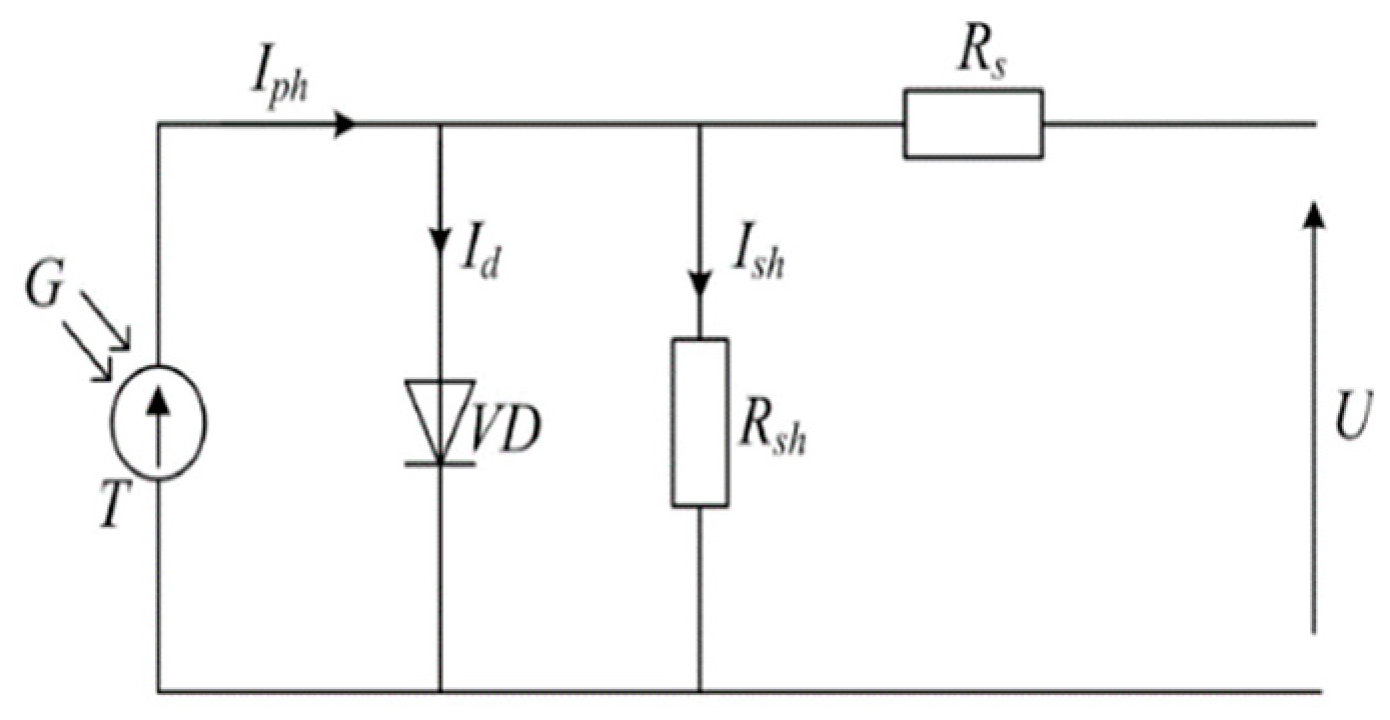
3.2.1. Photovoltaic Cell Model
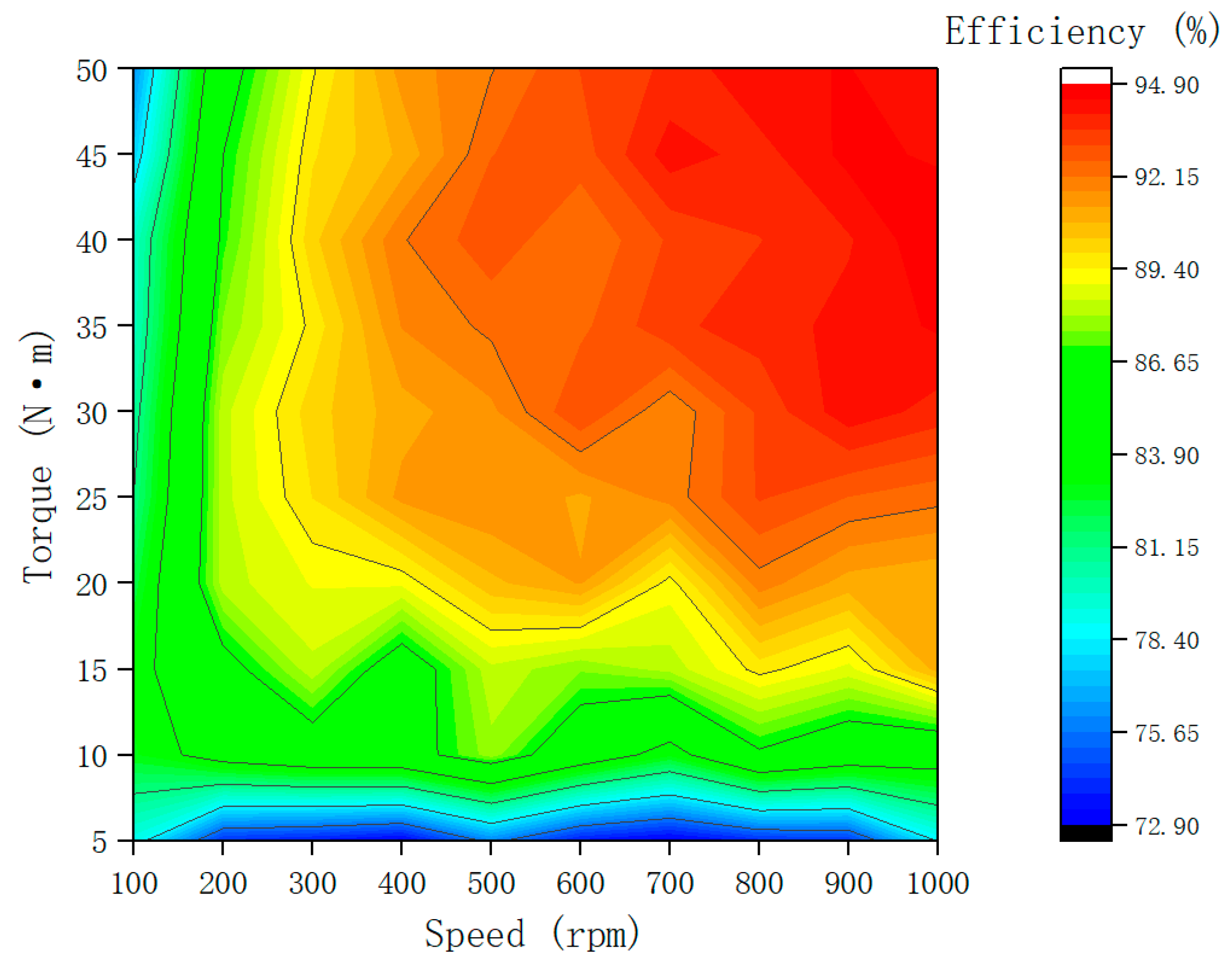
3.2.2. Drive Motor Model
3.3. Modeling of Power Battery Based on Data-Driven
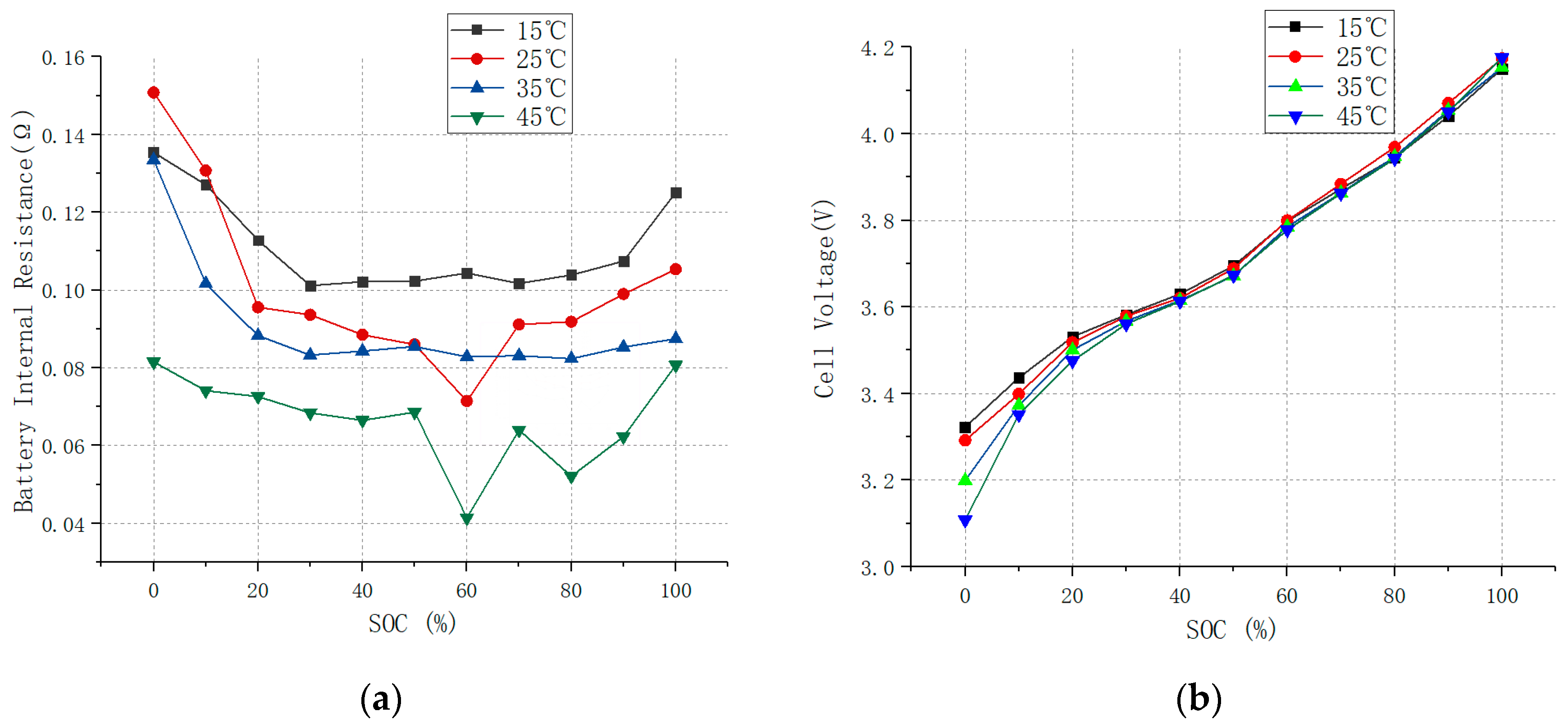
3.3.1. Power Battery Mathematical Model
3.3.2. SVM-Based Data-Driven Modeling
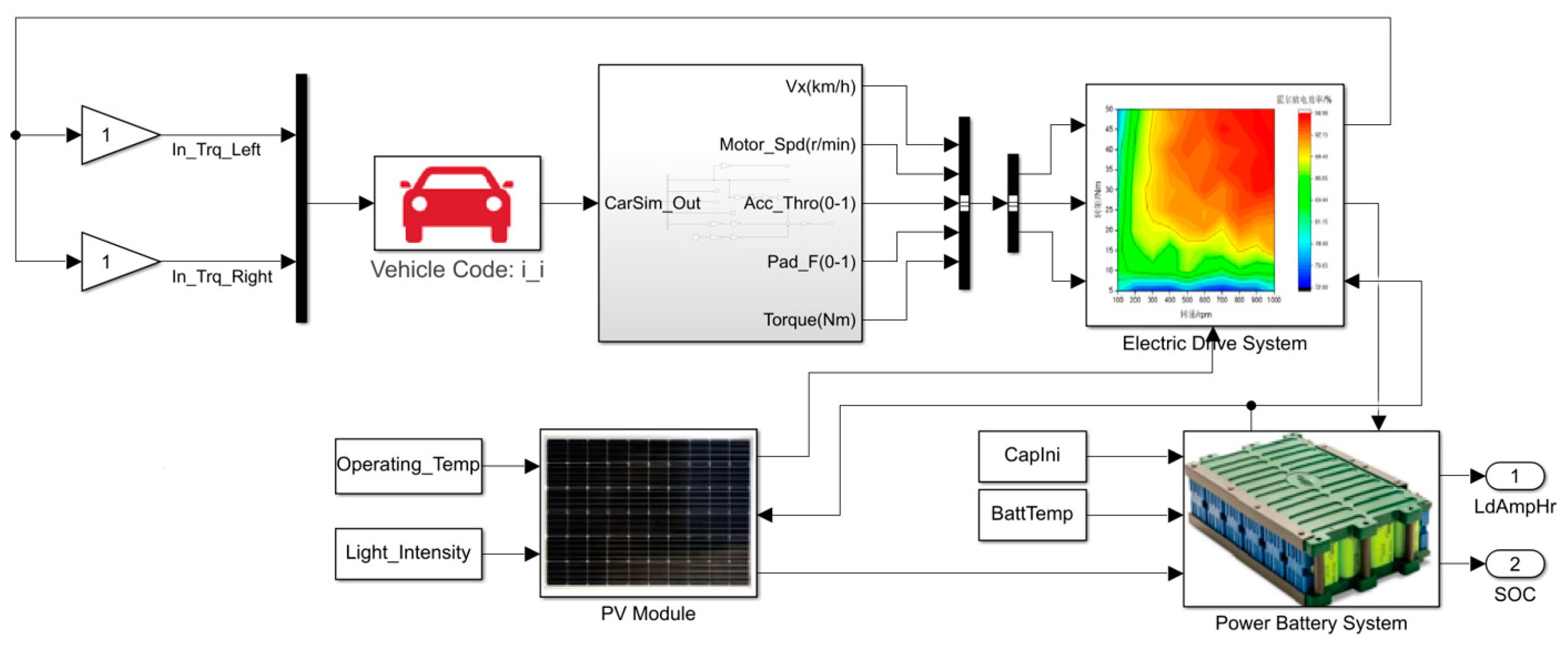
3.4. Complete Solar Car Model
4. Validation and Discussion
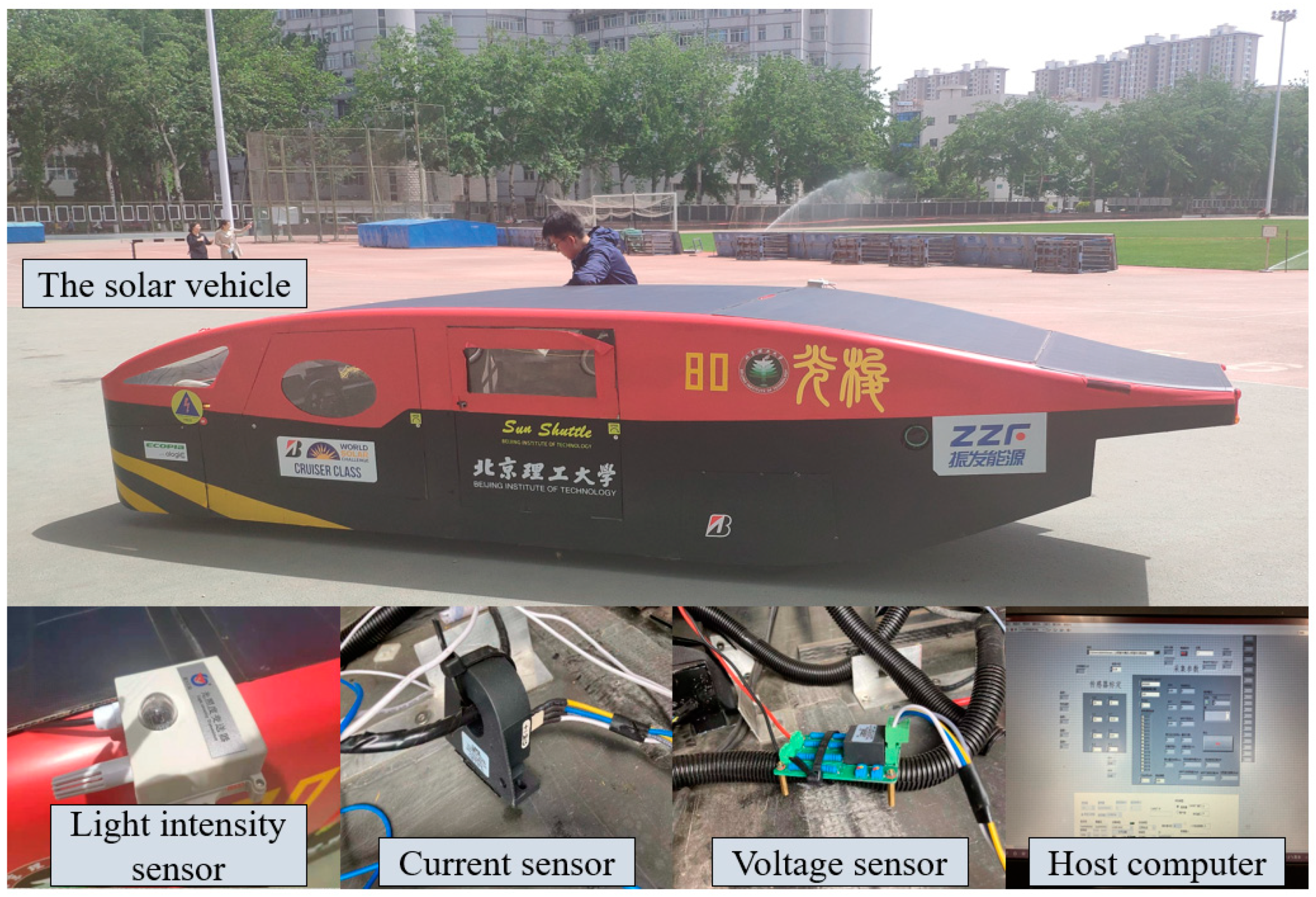
4.1. Construction of the Test Platform
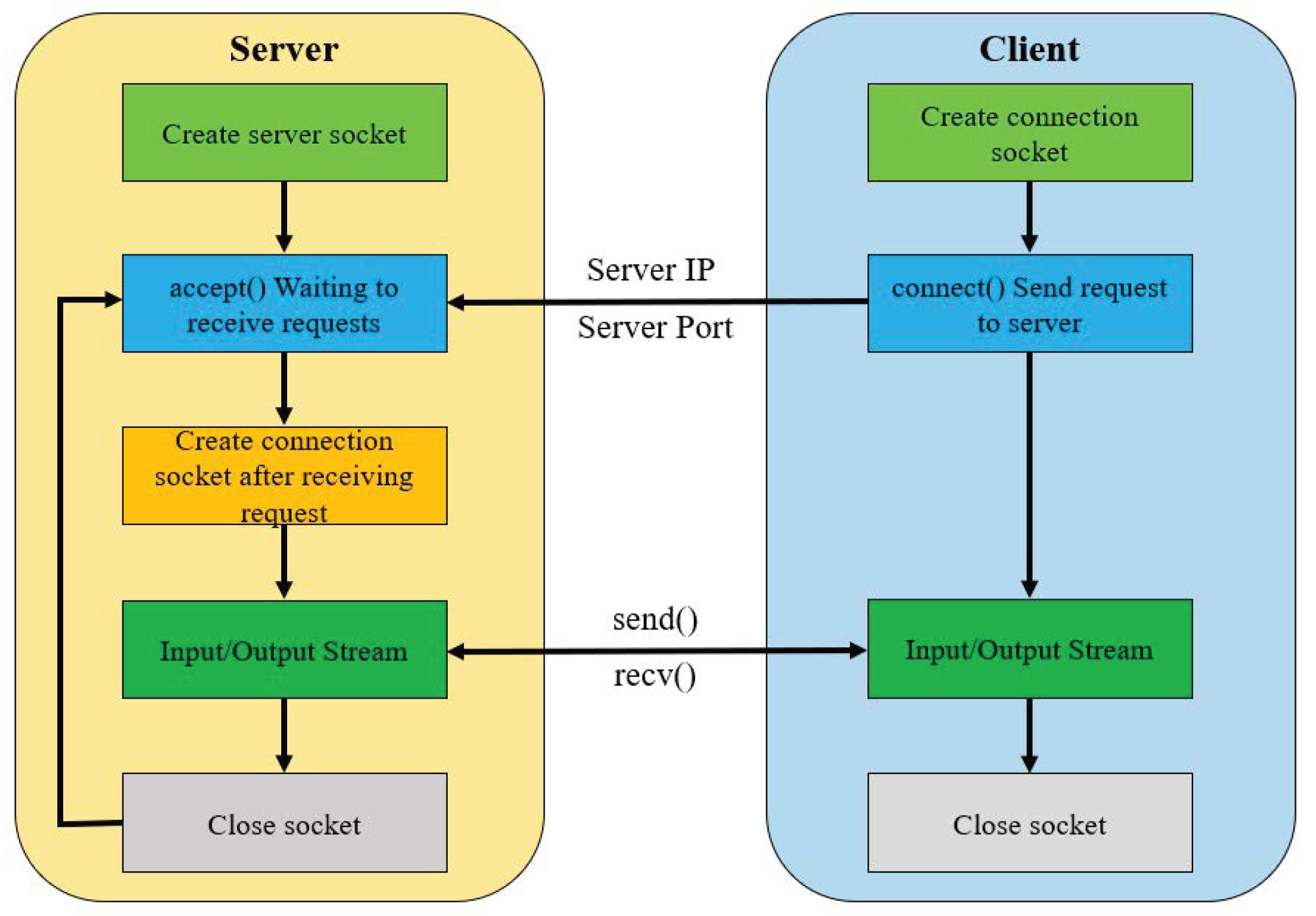
4.1.1. Server Software Design
4.1.2. Data Transmission Test
4.1.3. Experimental Design
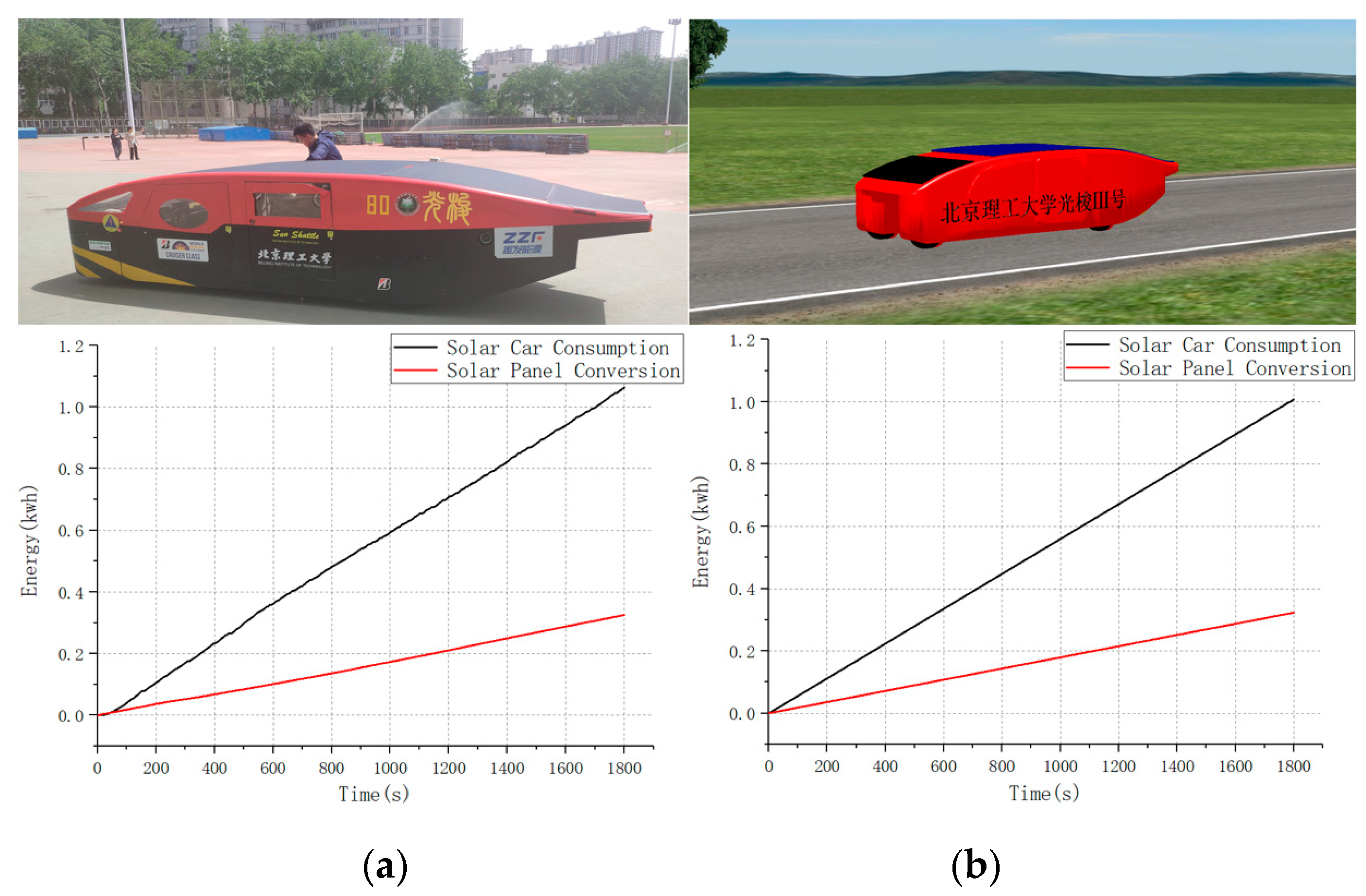
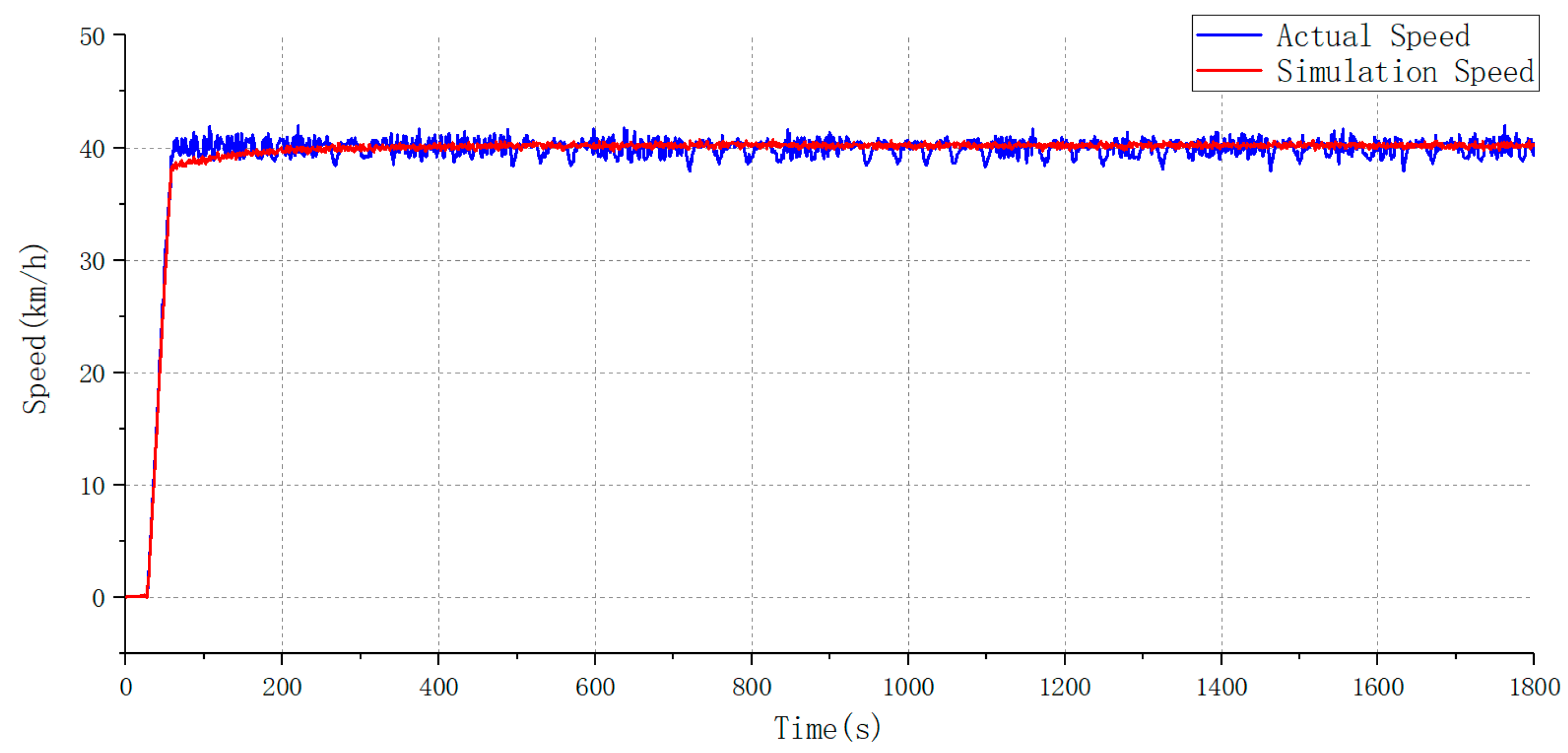
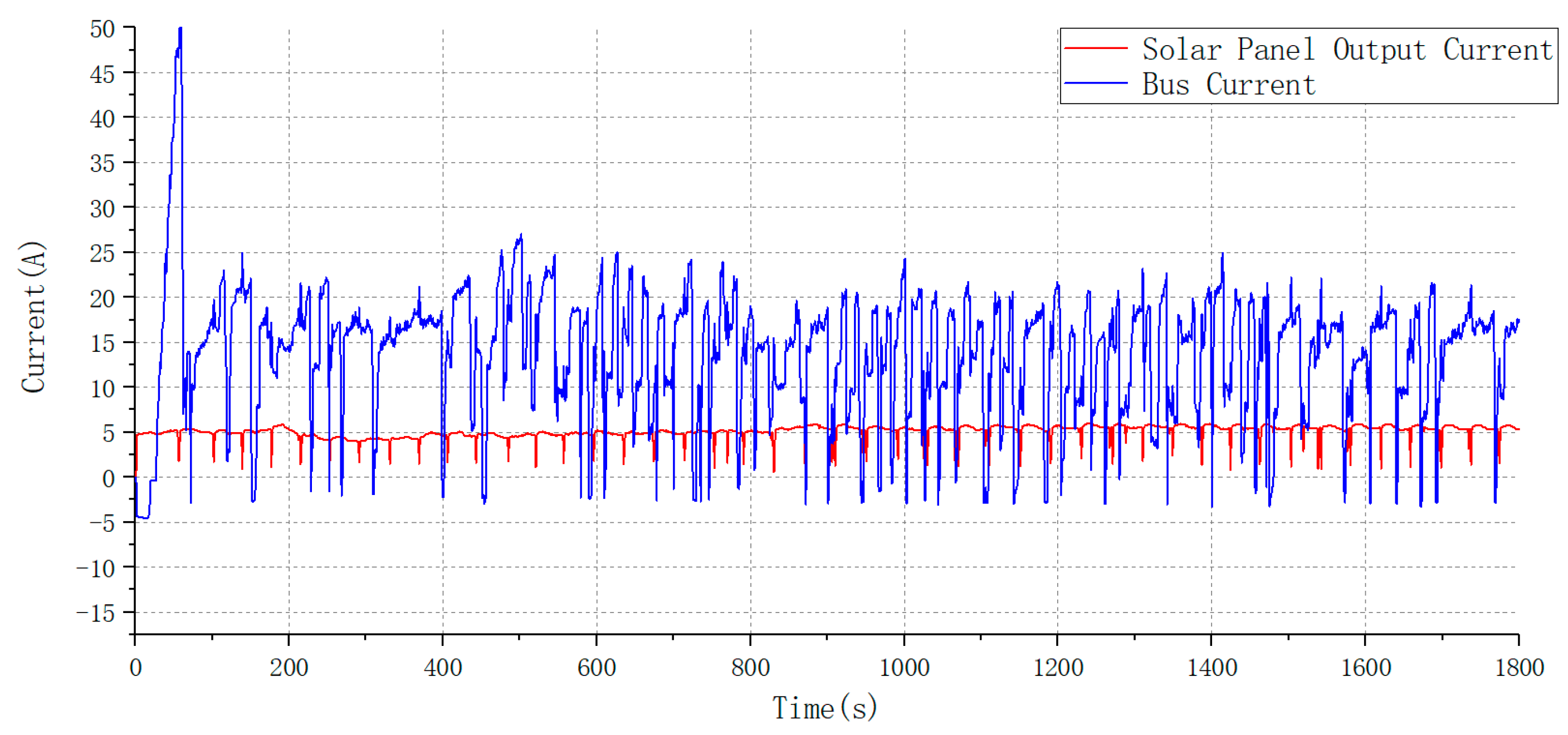
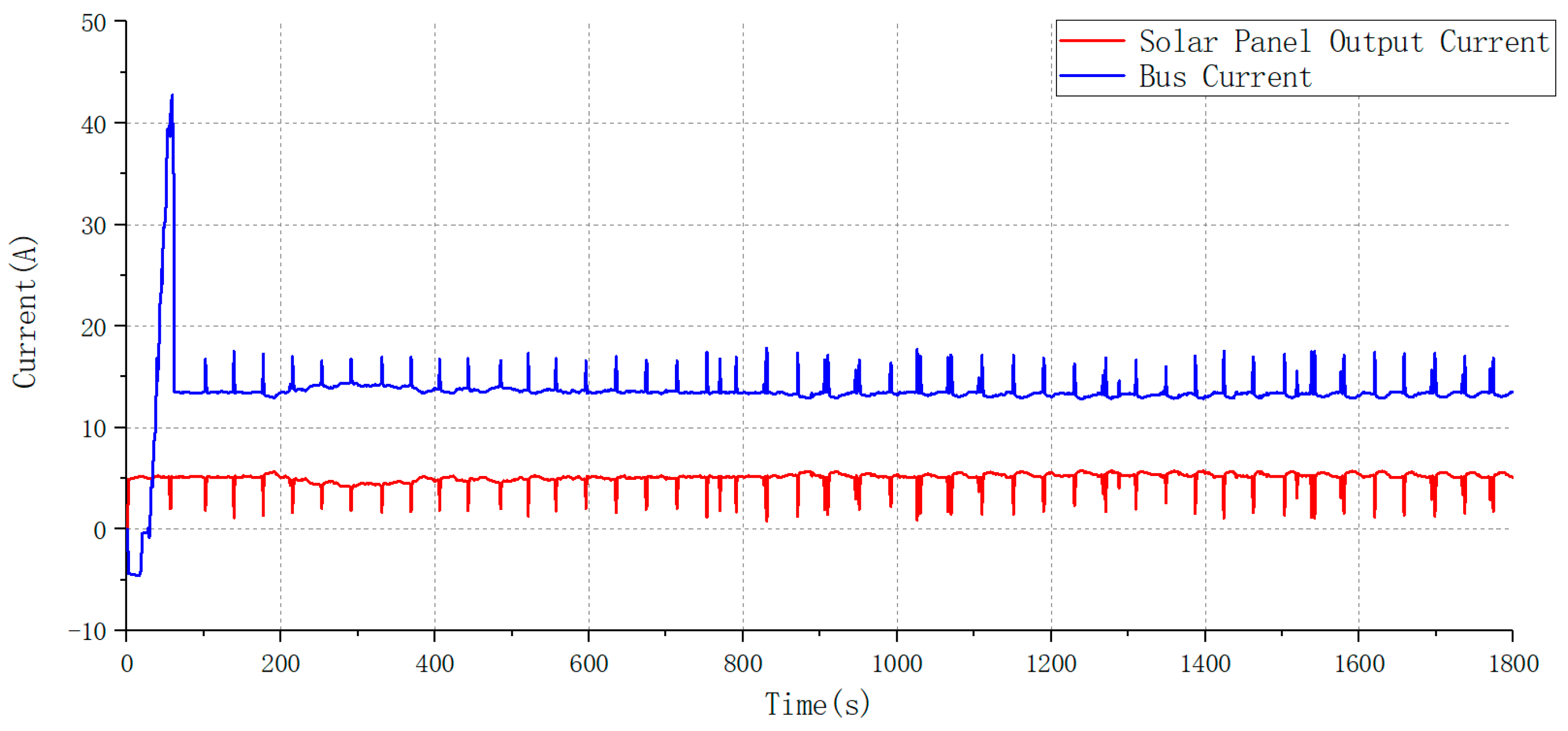
4.2. Experimental Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Araki, K.; Ota, Y.; Yamaguchi, M. Measurement and Modeling of 3D Solar Irradiance for Vehicle-Integrated Photovoltaic. Appl. Sci. 2020, 10, 872. [Google Scholar] [CrossRef] [Green Version]
- Kohei, Y.; Junji, H.; Dai, W.; Sadayuki, I. Graduation Research for Developing the Faculty of Creation—Design and Manufacturing of a Solar Car. Tech. Rep. Seikei Univ. 2003, 40, 9–16. [Google Scholar]
- Suita, Y.; Tadakuma, S. Driving Performances of Solar Energy Powered Vehicle with Novel Maximum Power Tracking Control for a Solar Car Rally. In Proceedings of the Industrial Technology, 2006. ICIT 2006. IEEE International Conference on Industrial Tehnology, Mumbai, India, 15–17 December 2016; IEEE: Piscataway, NJ, USA, 2006; pp. 1218–1223. [Google Scholar]
- Ustun, O.; Yilmaz, M.; Gokce, C.; Karakaya, U.; Tuncay, R.N. Energy Management Method for solar race car design and application. In Proceedings of the Electric Machines and Drives Conference, 2009. IEMDC ’09, IEEE International, Miami, FL, USA, 3–6 May 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 804–811. [Google Scholar]
- Vinnichenko, N.A.; Uvarov, A.V.; Znamenskaya, I.A.; Ay, H.; Wang, T.H. Solar car aerodynamic design for optimal cooling and high efficiency. Sol. Energy 2014, 103, 183–190. [Google Scholar] [CrossRef]
- Mambou, E.N.; Swart, T.G.; Ndjiounge, A.R.; Clarke, W.A. Design and implementation of a real-time tracking and telemetry system for a solar car. In Proceedings of the Africon, Addis Ababa, Ethiopia, 14–17 September 105; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar]
- Shao, X.; Lu, S.; van Kessel, T.G.; Hamann, H.F.; Daehler, L. Solar irradiance forecasting by machine learning for solar car races. In Proceedings of the IEEE International Conference on Big Data, Washington, DC, USA, 5–8 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 2209–2216. [Google Scholar]
- Schroeder, G.N.; Steinmetz, C.; Pereira, C.E.; Espindola, D.B. Digital Twin Data Modeling with AutomationML and a Communication Methodology for Data Exchange. IFAC PapersOnLine 2016, 49, 12–17. [Google Scholar] [CrossRef]
- Schleich, B.; Anwer, N.; Mathieu, L.; Wartzack, S. Shaping the digital twin for design and production engineering. CIRP Ann. 2017, 66, 141–144. [Google Scholar] [CrossRef] [Green Version]
- Jacoby, M.; Usländer, T. Digital Twin and Internet of Things-Current Standards Landscape. Appl. Sci. 2020, 10, 6519. [Google Scholar] [CrossRef]
- Mukherjee, T.; Debroy, T. A digital twin for rapid qualification of 3D printed metallic components. Appl. Mater. Today 2018, 14, 59–65. [Google Scholar] [CrossRef]
- Kousi, N.; Gkournelos, C.; Aivaliotis, S.; Giannoulis, C.; Michalos, G.; Makris, S. Digital twin for adaptation of robots’ behavior in flexible robotic assembly lines. Procedia Manuf. 2019, 28, 121–126. [Google Scholar] [CrossRef]
- Matulis, M.; Harvey, C. A robot arm digital twin utilising reinforcement learning. Comput. Graph. 2021, 95, 106–114. [Google Scholar] [CrossRef]
- Vachálek, J.; Bartalský, L.; Rovný, O.; Šišmišová, D.; Morháč, M.; Lokšík, M. The digital twin of an industrial production line within the industry 4.0 concept. In Proceedings of the 2017 21st International Conference on Process Control (PC), Štrbské Pleso, Slovakia, 6–9 June 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Mohammadi, N.; Taylor, J.E. Smart city digital twins. In Proceedings of the 2017 IEEE Symposium Series on Computational Intelligence (SSCI), Honolulu, HI, USA, 27 November–1 December 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Fei, T.; Jiangfeng, C.; Qinglin, Q.; Zhang, M.; Zhang, H.; Fangyuan, S. Digital twin-driven product design, manufacturing and service with big data. Int. J. Adv. Manuf. Technol. 2018, 94, 3563–3576. [Google Scholar]
- Qi, Q.; Tao, F. Digital Twin and Big Data Towards Smart Manufacturing and Industry 4.0: 360 Degree Comparison. IEEE Access 2018, 6, 3585–3593. [Google Scholar] [CrossRef]
- Hyeong-su, K.; Jin-Woo, K.; Yun, S.; Kim, W.T. A novel wildfire digital-twin framework using interactive wildfire spread simulator. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019. [Google Scholar]
- Zehnder, P.; Riemer, D. Representing Industrial Data Streams in Digital Twins using Semantic Labeling. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Minerva, R.; Lee, G.M.; Crespi, N. Digital Twin in the IoT Context: A Survey on Technical Features, Scenarios, and Architectural Models. Proc. IEEE 2020, 8, 1785–1824. [Google Scholar] [CrossRef]
- Barricelli, B.R.; Casiraghi, E.; Fogli, D. A Survey on Digital Twin: Definitions, Characteristics, Applications, and Design Implications. IEEE Access 2019, 7, 167653–167671. [Google Scholar] [CrossRef]
- Peng, Y.; Zhao, S.; Wang, H. A Digital Twin based Estimation Method for Health Indicators of DC-DC Converters. IEEE Trans. Power Electron. 2020, 36, 2105–2118. [Google Scholar] [CrossRef]
- Peng, Y.; Wang, H. Application of Digital Twin Concept in Condition Monitoring for DC-DC Converter. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimor, MD, USA, 29 September–3 October 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Li, W.; Rentemeister, M.; Badeda, J.; Jöst, D.; Schulte, D.; Sauer, D.U. Digital twin for battery systems: Cloud battery management system with online state-of- charge and state-of-health estimation. J. Energy Storage 2020, 30, 101557. [Google Scholar] [CrossRef]
- Ramachandran, R.; Subathra, B.; Srinivasan, S. Recursive Estimation of Battery Pack Parameters in Electric Vehicles. In Proceedings of the 2018 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC), Tamil Nadu, India, 13–15 December 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Venkatesan, S.; Manickavasagam, K.; Tengenkai, N.; Vijayalakshmi, N. Health monitoring and prognosis of electric vehicle motor using intelligent-digital twin. IET Electr. Power Appl. 2019, 13, 1328–1335. [Google Scholar] [CrossRef]
- Ezhilarasu, C.M.; Jennions, I.K.; Skaf, Z. Understanding the role of a Digital Twin in the field of Integrated Vehicle Health Management (IVHM). In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics 2019, Bari, Italy, 6–9 October 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Magargle, R.; Johnson, L.; Mandloi, P.; Davoudabadi, P.; Kesarkar, O.; Krishnaswamy, S.; Batteh, J.; Pitchaikani, A. A Simulation-Based Digital Twin for Model-Driven Health Monitoring and Predictive Maintenance of an Automotive Braking System. In Proceedings of the International Modelica Conference, Prague, Czech Republic, 15–17 May 2017. [Google Scholar]
- Zakrajsek, A.J.; Mall, S. The Development and use of a Digital Twin Model for Tire Touchdown Health Monitoring. In Proceedings of the 58th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar]
- Jain, P.; Poon, J.; Singh, J.P.; Spanos, C.; Sanders, S.R.; Panda, S.K. A Digital Twin Approach for Fault Diagnosis in Distributed Photovoltaic System. IEEE Trans. Power Electron. 2019, 35, 940–956. [Google Scholar] [CrossRef]
- González, M.; Salgado, O.; Croes, J.; Pluymers, B.; Desmet, W. A Digital Twin for operational evaluation of vertical transportation systems. IEEE Access 2020, 8, 114389–114400. [Google Scholar] [CrossRef]
- Breen, D.; Zordan, V.B.; Horst, N. Mapping optical motion capture data to skeletal motion using a physical model. In Proceedings of the 2003 ACM SIGGRAPH/Eurographics Symposium on Computer Animation, San Diego, CA, USA, 26–27 July 2003; Eurographics Association: Goslar, Germany; pp. 245–250. [Google Scholar]
- Rojek, I.; Mikołajewski, D.; Dostatni, E. Digital Twins in Product Lifecycle for Sustainability in Manufacturing and Maintenance. Appl. Sci. 2021, 11, 31. [Google Scholar] [CrossRef]
- Birnie, D.P. Analysis of energy capture by vehicle solar roofs in conjunction with workplace plug-in charging. Sol. Energy 2016, 125, 219–226. [Google Scholar] [CrossRef]
- Gibson, T.L.; Kelly, N.A. Solar photovoltaic charging of lithium-ion batteries. J. Power Sources 2010, 195, 3928–3932. [Google Scholar] [CrossRef]
- Xie, Y.; Li, Y.; Zhao, Z.; Dong, H.; Wang, S.; Liu, J.; Guan, J.; Duan, X. Microsimulation of electric vehicle energy consumption and driving range. Appl. Energy 2020, 267, 115081. [Google Scholar] [CrossRef]
- Luin, B.; Petelin, S.; Al-Mansour, F. Microsimulation of electric vehicle energy consumption. Energy 2019, 174, 24–32. [Google Scholar] [CrossRef]
- Malik, A.A.; Brem, A. Digital twins for collaborative robots: A case study. Robot. Comput. Integr. Manuf. 2021, 68, 102092. [Google Scholar] [CrossRef]
- Son, Y.H.; Park, K.T.; Lee, D.; Jeon, S.W.; Do Noh, S. Digital twin-based cyber-physical system for automotive body production lines. Int. J. Adv. Manuf. Technol. 2021, 115, 1–20. [Google Scholar] [CrossRef]
- Chiang, Y.H.; Sean, W.Y.; Ke, J.C. Online estimation of internal resistance and open-circuit voltage of lithium-ion batteries in electric vehicles. J. Power Sources 2011, 196, 3921–3932. [Google Scholar] [CrossRef]
- Sun, L.; Li, G.; You, F. Combined internal resistance and state-of-charge estimation of lithium-ion battery based on extended state observer. Renew. Sustain. Energy Rev. 2020, 131, 10994. [Google Scholar] [CrossRef]
- Gu, L.; Gui, J.Y.; Wang, J.V.; Zhu, G.; Kang, J. Parameterized evaluation of thermal characteristics for a lithium-ion battery. Energy 2019, 178, 21–32. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Curb Mass | 395 kg |
| Dimensions | 5000 × 1650 × 1200 mm |
| Wheelbase | 2850 mm |
| Battery Capacity | 20 kWh |
| Solar Panel Area | 5 m2 |
| Max Power | 12 kW |
| Top Speed | 130 km/h |
| Range | 700 km |
| Parameters | Values |
|---|---|
| Sprung Mass | 420 kg |
| Axial Load Distribution Ratio | 40:60 |
| Mass Center of Sprung Mass | 520 cm |
| Drag Coefficient | 0.16 |
| Frontal Area | 1.45 m2 |
| No-load Tire Radius | 280 mm |
| Drive Form | Rear hub motor direct drive |
| Maximum Brake Pedal Input Force | 400 N |
| Ratio of Front and Rear Braking Force | 55:45 |
| Category | Type | Range | Accuracy |
|---|---|---|---|
| Voltage Sensor | KSD-4U | 0–150 V | ±0.1% |
| Current Sensor | KXK-36 | 0–50 A | ±0.1% |
| Light Intensity Sensor | RS-GZ-V05-2 | 0-65535 Lux | ±7%(25 °C) |
| Temperature Sensor | Pt100 | −50–200 ℃ | ±0.35 °C |
| Tire Pressure Sensor | YB-68 | 0–5.0 Bar | ±0.1Bar |
| Anemometer | PM6252B | 0.40–30.0 m/s | ±0.01 m/s |
| Data Acquisition Board | USB-2000 | ±5 V | ±0.9 mV |
| GPS Sensor | WTGAHRS1 | - | <2 m |
| Accelerometer | WTGAHRS1 | ±8 g | ±0.01 g |
| Category | Data |
|---|---|
| Temperature | 22 °C |
| Wind Speed | <0.5 m/s |
| Light Intensity | 9500–100,000 Lux |
| Road | Plastic Runway |
| Road Slope | <1 |
| Total Load | 600 kg |
| Cruising Speed | 40 km/h |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, L.; Zhang, Y.; Wei, H.; Dong, J.; Tian, W. Digital Twin Modeling of a Solar Car Based on the Hybrid Model Method with Data-Driven and Mechanistic. Appl. Sci. 2021, 11, 6399. https://doi.org/10.3390/app11146399
Bai L, Zhang Y, Wei H, Dong J, Tian W. Digital Twin Modeling of a Solar Car Based on the Hybrid Model Method with Data-Driven and Mechanistic. Applied Sciences. 2021; 11(14):6399. https://doi.org/10.3390/app11146399
Chicago/Turabian StyleBai, Luchang, Youtong Zhang, Hongqian Wei, Junbo Dong, and Wei Tian. 2021. "Digital Twin Modeling of a Solar Car Based on the Hybrid Model Method with Data-Driven and Mechanistic" Applied Sciences 11, no. 14: 6399. https://doi.org/10.3390/app11146399