
Shift Strategy Optimization for Automatic Transmission of Heavy Trucks Based on Dynamic Programming Algorithm


Abstract
:1. Introduction
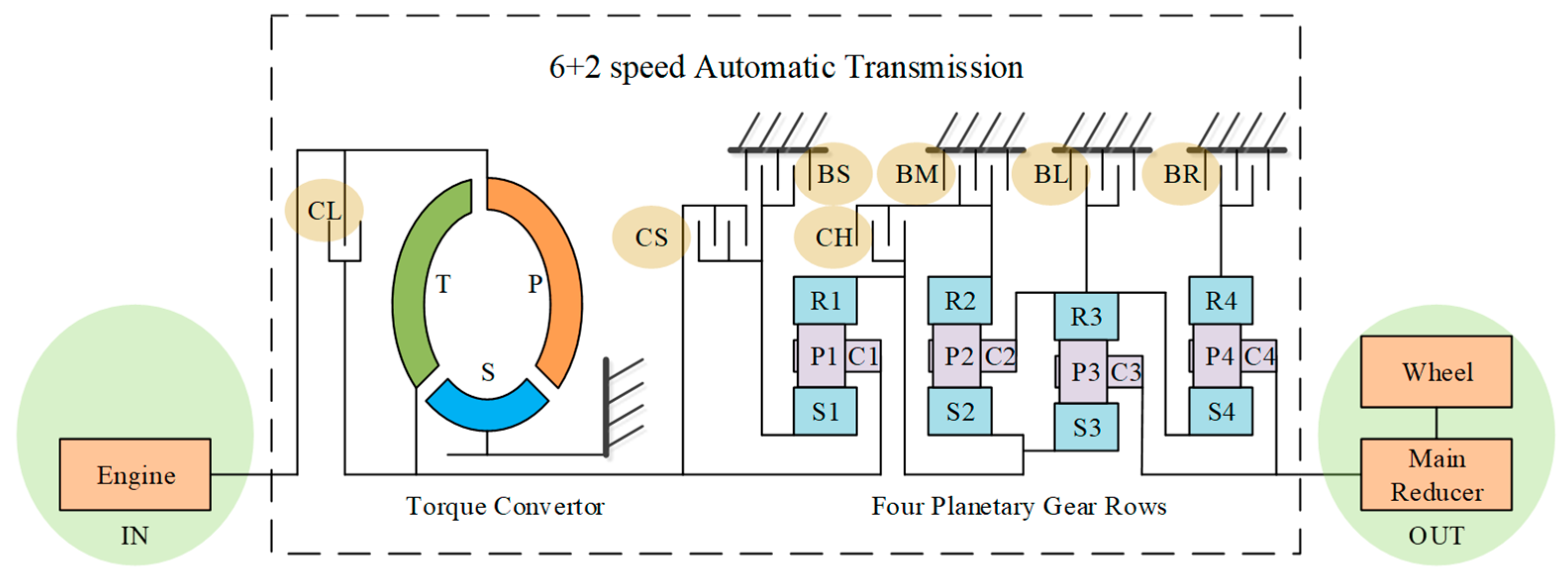
2. Modeling of Heavy-Duty Mining Trucks Powertrain System
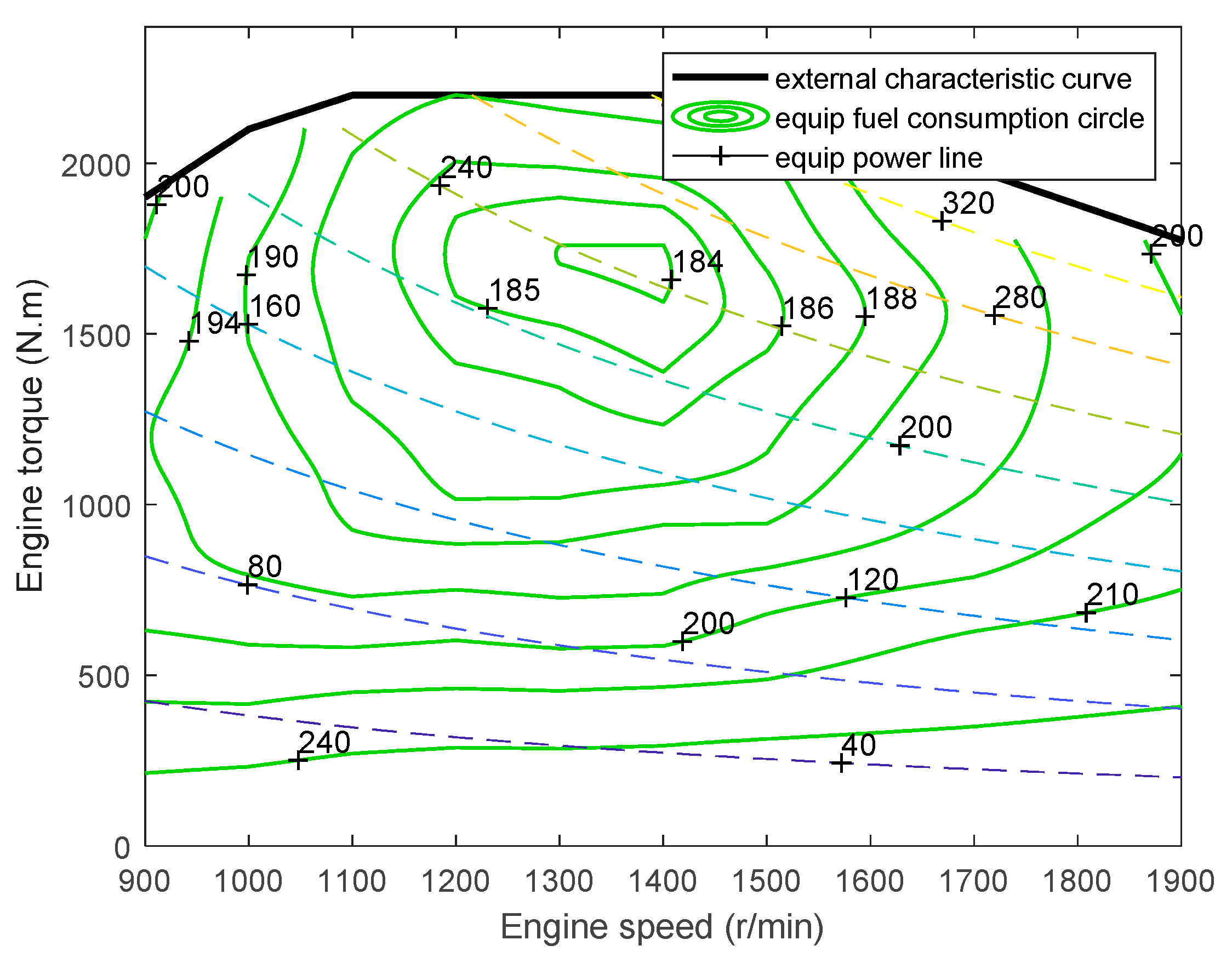
2.1. Modeling of the Engine
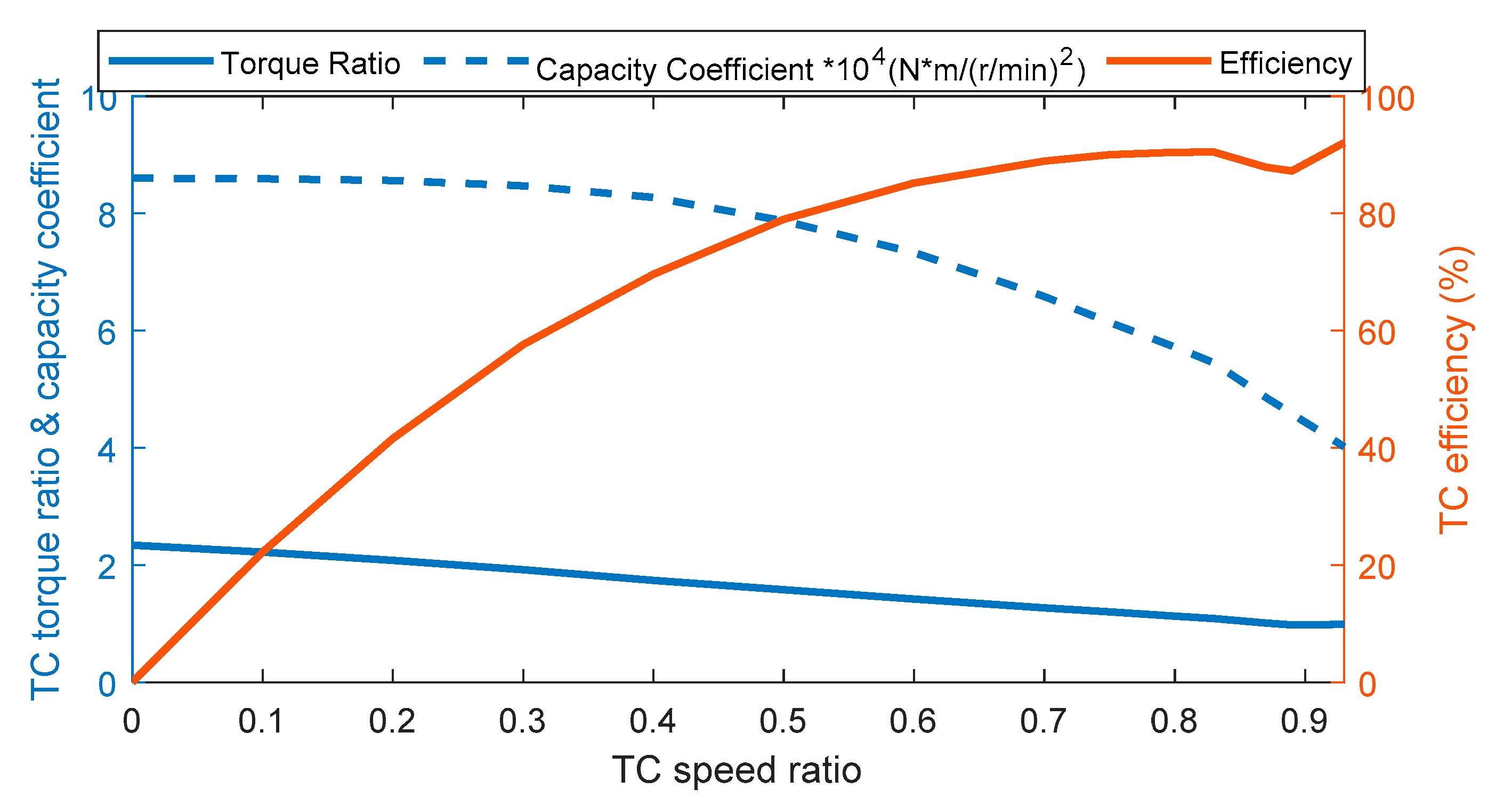
2.2. Modeling of the Torque Converter
2.3. Modeling of the Planetary Gear Mechanism
2.4. Modeling of the Main Reducer and Wheels
3. Shift Strategy Modification Based on Vehicle Load and Road Slope
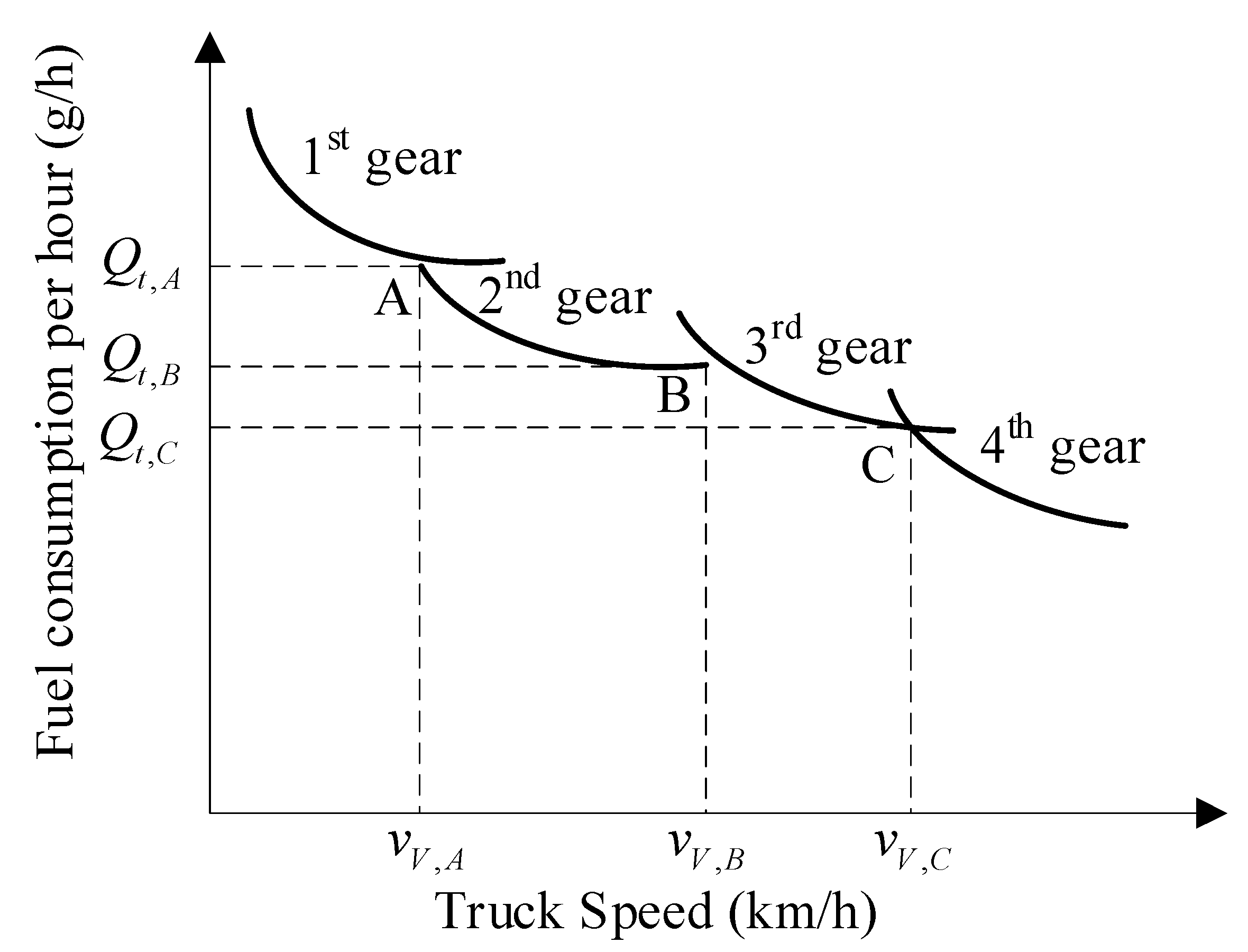
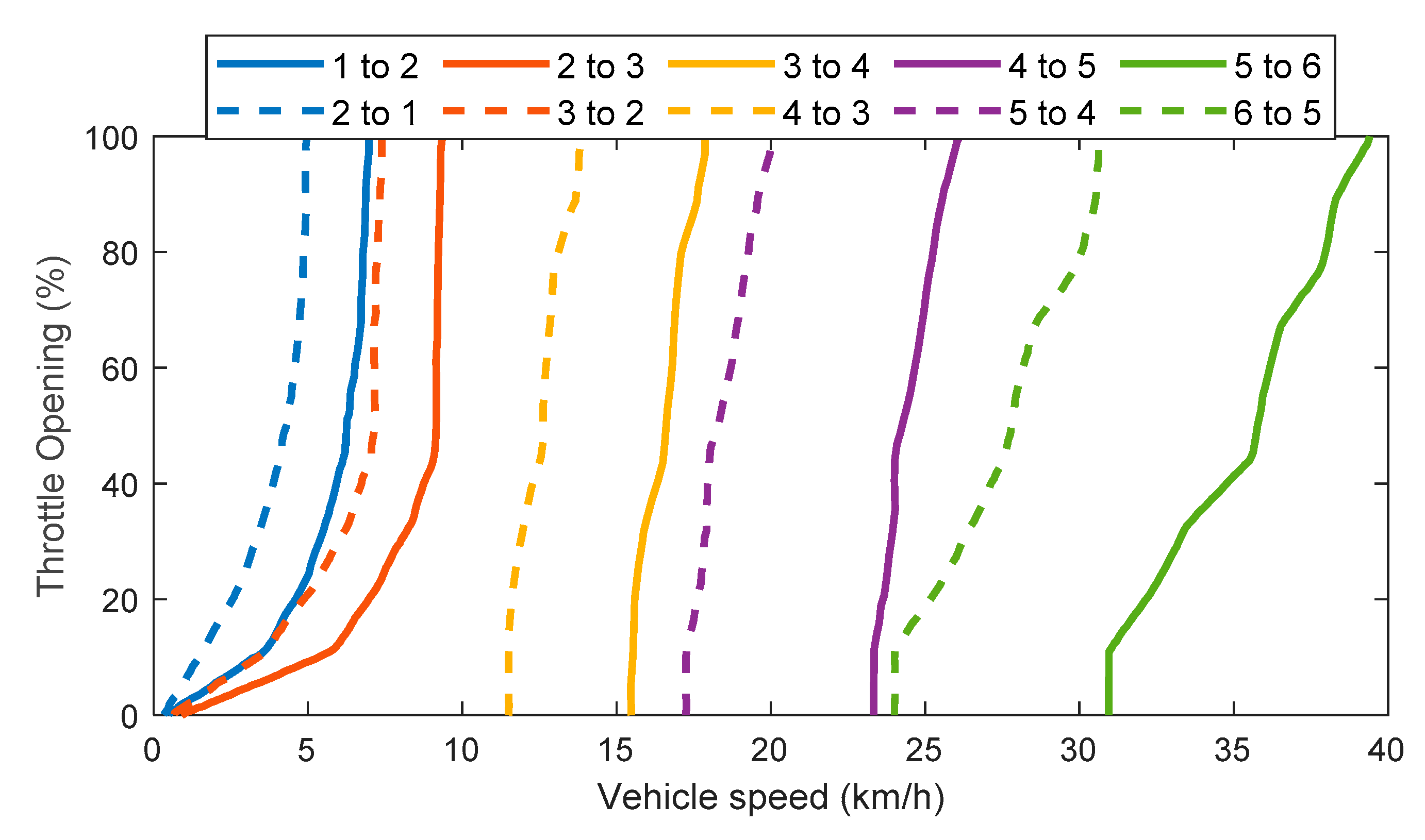
3.1. The Traditional Two-Parameter Economical Shift Strategy
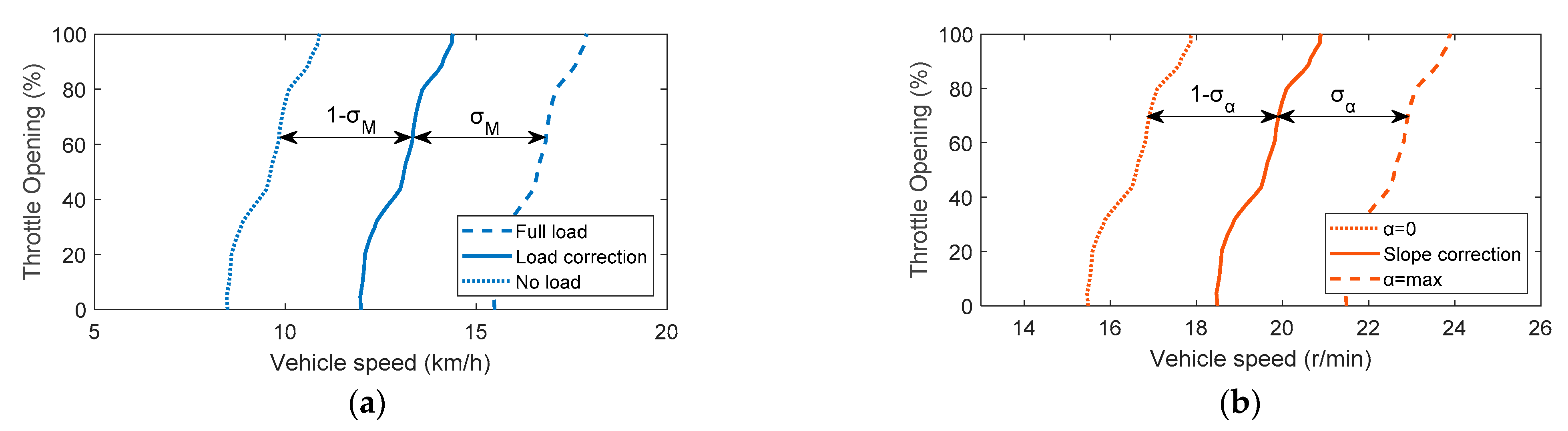
3.2. Modification of Shift Strategy Based on Vehicle Load
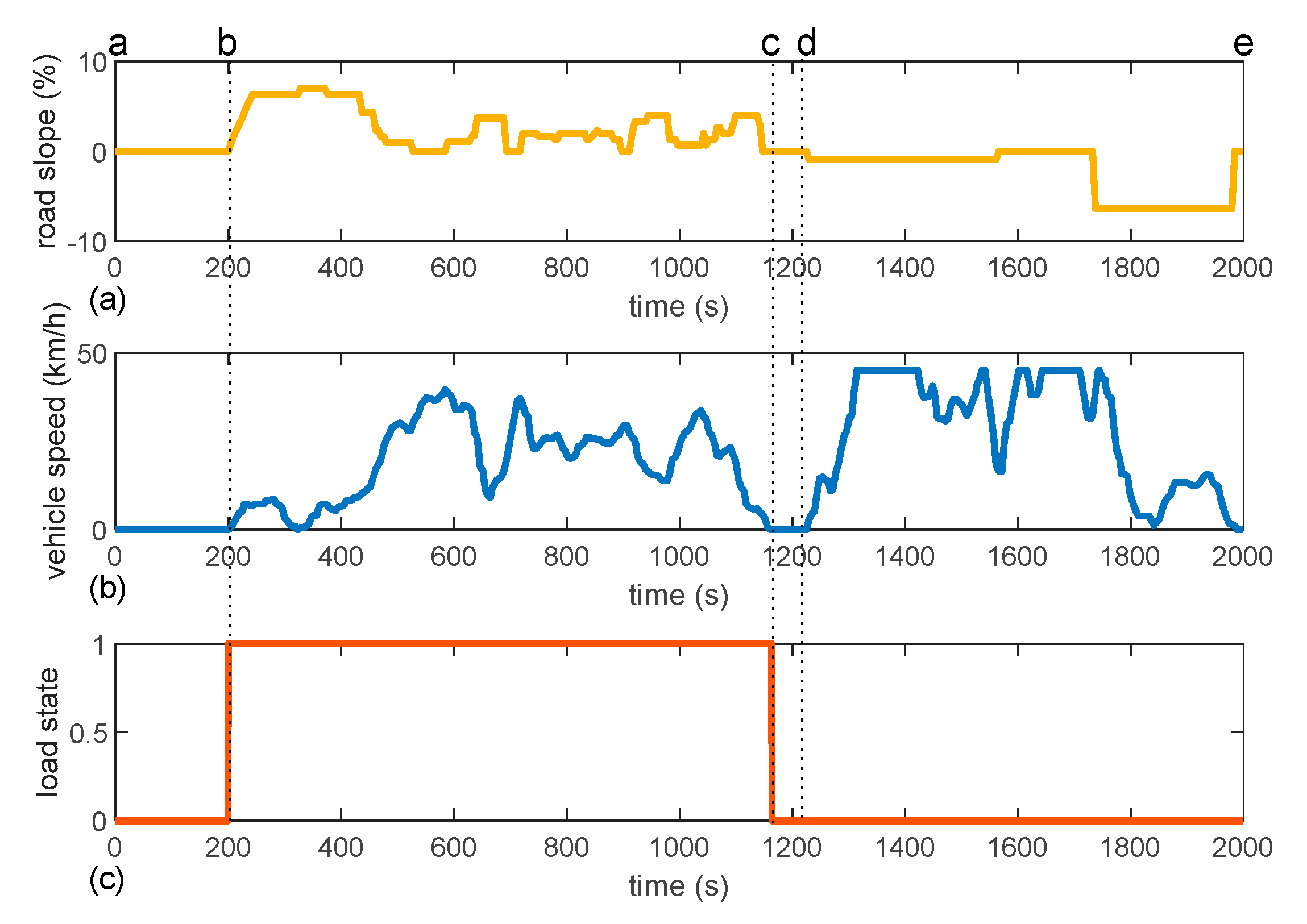
3.3. Modification of Shift Strategy Based on Road Slope
4. Optimizing Shift Strategy Based on DP
5. Simulation Results of DP
6. Conclusions
- (1)
- In this paper, the powertrain system model for a heavy-duty mining truck equipped with automatic transmission is built in MATLAB. The traditional economical two-parameter shift strategy is modified according to the vehicle load and road slope. The revised shift strategy shows that the upshift required higher vehicle speed under full load climbing working conditions.
- (2)
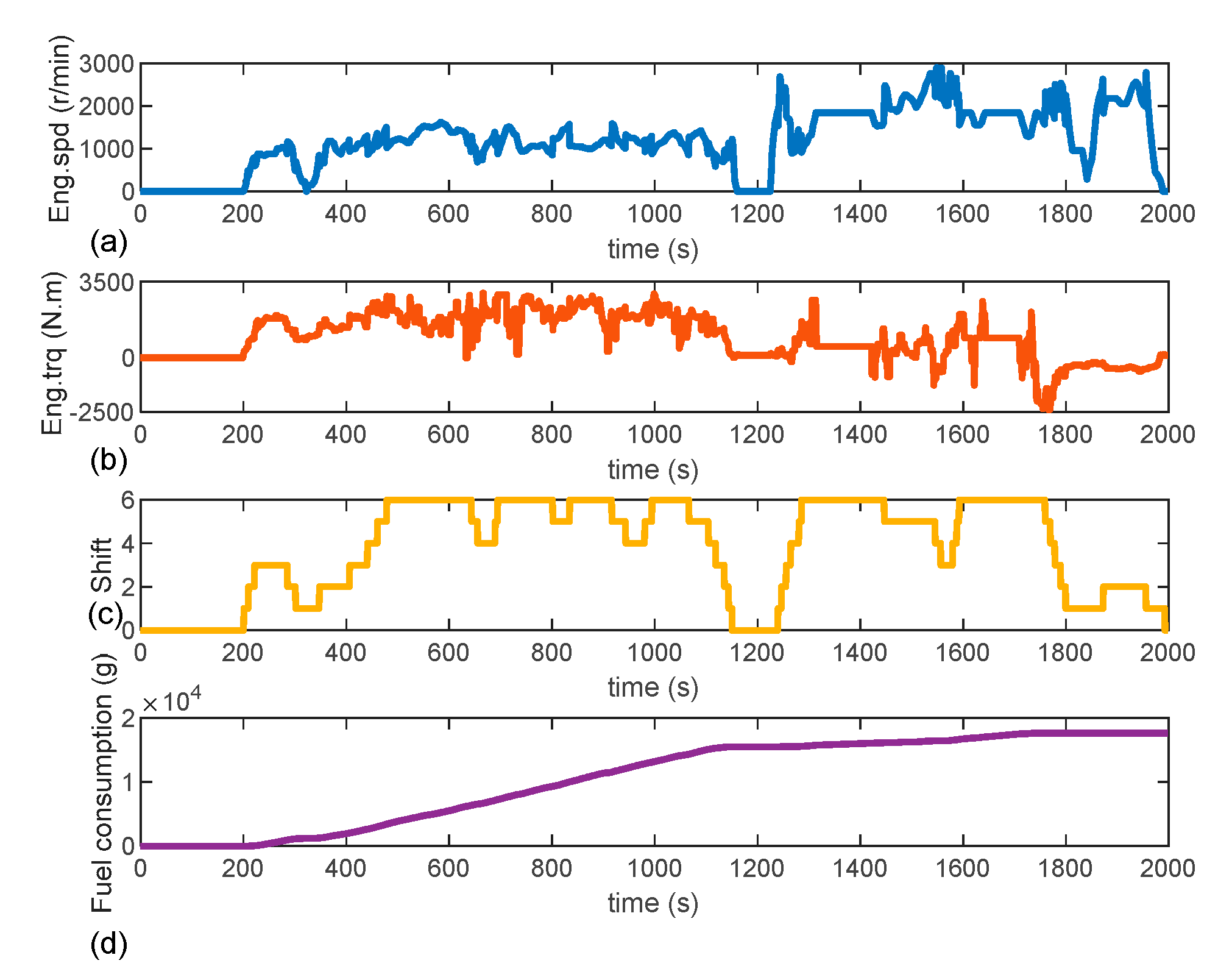
- The optimal shift strategy based on a dynamic programming algorithm under known working conditions is proposed. The simulation results show that the proposed shift strategy can effectively reduce the fuel consumption from 19.3 to 17.6 kg and unnecessary shifts from 73 to 46 times, respectively.
- (3)
- Overall, the DP algorithm to optimize the global shift strategy for heavy-duty mining trucks is feasible and efficient. Hardware-in-the-loop and real vehicle testing will be the key of the future works.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Meng, F.; Shi, P.; Karimi, H.R.; Zhang, H. Optimal design of an electro-hydraulic valve for heavy-duty vehicle clutch actuator with certain constraints. Mech. Syst. Signal Pr. 2016, 68–69, 491–503. [Google Scholar] [CrossRef]
- Ouyang, T.; Huang, G.; Li, S.; Chen, J.; Chen, N. Dynamic modelling and optimal design of a clutch actuator for heavy-duty automatic transmission considering flow force. Mech. Mach. Theory 2020, 145, 103716. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, X.; Sun, J. Optimal clutch pressure control in shifting process of automatic transmission for heavy-duty mining trucks. Math. Probl. Eng. 2020, 2020, 1–9. [Google Scholar]
- Zhang, H.; Zhao, X.; Yang, J.; Zhang, W. Optimizing automatic transmission double-transition shift process based on multi-objective genetic algorithm. Appl. Sci. 2020, 10, 7794. [Google Scholar] [CrossRef]
- Zhao, X.; Li, Z. Data-driven predictive control applied to gear shifting for heavy-duty vehicles. Energies 2018, 11, 2139. [Google Scholar] [CrossRef] [Green Version]
- Tan, S.; Yang, J.; Zhao, X.; Hai, T.; Zhang, W. Gear ratio optimization of a multi-speed transmission for electric dump truck operating on the structure route. Energies 2018, 11, 1324. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Liang, J.; Yang, J.; Zhang, N. Optimal control of a novel uninterrupted multi-speed transmission for hybrid electric mining trucks. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2018, 233, 3235–3245. [Google Scholar] [CrossRef]
- Zhang, G.X.; Li, M.; Wei, X. Research on intelligent shift strategy of automatic transmission. Adv. Mater. Res. 2014, 988, 586–589. [Google Scholar] [CrossRef]
- Nejad, A.F.; Chiandussi, G.; Solimine, V.; Serra, A. Study of a synchronizer mechanism through multibody dynamic analysis. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 1601–1613. [Google Scholar] [CrossRef]
- Li, H.; He, H.; Peng, J.; Li, Z. Three-parameter shift schedule of automatic mechanical transmission for electric bus. Energy Procedia 2018, 145, 504–509. [Google Scholar] [CrossRef]
- Lei, Y.; Liu, K.; Zhang, Y.; Fu, Y.; Liu, H.; Lin, G.; Tang, H. Adaptive gearshift strategy based on generalized load recognition for automatic transmission vehicles. Math. Probl. Eng. 2015, 2015, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Cao, Q.; Zhou, Z.; Zhang, M. Fuzzy adaptive shift schedule of tractor subjected to random load. Math. Probl. Eng. 2017, 2017, 1–8. [Google Scholar] [CrossRef]
- Xia, G.; Gao, J.; Tang, X.; Wang, S.; Sun, B. Control strategy for shift schedule correction based on driving habits for vehicles with automatic transmission. Int. J. Automot. Technol. 2020, 21, 407–418. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, X.; Han, Z.; Chen, J.; Liu, J. A novel multi-parameter coordinated shift control strategy for an automated manual transmission based on fuzzy inference. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 231, 684–699. [Google Scholar] [CrossRef]
- Lin, C.; Zhao, M.; Pan, H.; Yi, J. Blending gear shift strategy design and comparison study for a battery electric city bus with AMT. Energy 2019, 185, 1–14. [Google Scholar] [CrossRef]
- Li, G.; Gorges, D. Fuel-efficient gear shift and power split strategy for parallel HEVs based on heuristic dynamic programming and neural networks. IEEE T. Veh. Technol. 2019, 68, 9519–9528. [Google Scholar] [CrossRef]
- Ngo, V.D.; Hofman, T.; Steinbuch, M.; Serrarens, A. Gear shift map design methodology for automotive transmissions. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 228, 50–72. [Google Scholar] [CrossRef]
- Hellström, E.; Ivarsson, M.; Åslund, J.; Nielsen, L. Look-ahead control for heavy trucks to minimize trip time and fuel consumption. Control Eng. Pract. 2009, 17, 245–254. [Google Scholar] [CrossRef] [Green Version]
- Xu, C.; Al-Mamun, A.; Geyer, S.; Fathy, H.K. A Dynamic Programming-Based Real-Time Predictive Optimal Gear Shift Strategy for Conventional Heavy-Duty Vehicles. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018. [Google Scholar]
- Zhao, X.; Zhang, W.; Feng, Y.; Yang, Y. Optimizing gear shifting strategy for off-road vehicle with dynamic programming. Math. Probl. Eng. 2014, 2014, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Yang, W.; Yang, J.; Liang, J.; Zhang, N. Implementation of velocity optimisation strategy based on preview road information to trade off transport time and fuel consumption for hybrid mining trucks. IET Intell. Transp. Syst. 2019, 13, 194–200. [Google Scholar] [CrossRef]
- Song, R.; Wei, Q.; Li, Q. Adaptive Dynamic Programming: Single and Multiple Controllers; Springer: Singapore, 2018; p. 166. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gears | Gear Ratio | |||||||
|---|---|---|---|---|---|---|---|---|
| 1 | × | × | × | 4.00 | ||||
| 2 | × | × | × | 2.67 | ||||
| 3 | × | × | 2.00 | |||||
| 4 | × | × | 1.33 | |||||
| 5 | × | × | 1.00 | |||||
| 6 | × | × | 0.67 | |||||
| R1 | × | × | −5.00 | |||||
| R2 | × | × | −3.33 |
| Symbol | Value | Unit |
|---|---|---|
| 30,000 | ||
| 72,000 | ||
| 22.4 | ||
| 0.97 | ||
| 0.03 | ||
| 0.8 | ||
| 15 | ||
| 0.95 | ||
| 10.5% |
| Shift Strategy | Fuel Consumption | Reduction Rates | Number of Shifts | Reduction Rates | |
|---|---|---|---|---|---|
| Dynamic programming | 16.8 (kg) | 12.9% | 67 | 8.2% | |
| 17.6 (kg) | 8.8% | 46 | 37.0% | ||
| Traditional two parameters | - | 19.3 (kg) | - | 73 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhao, X.; Yang, J.; Yang, W. Shift Strategy Optimization for Automatic Transmission of Heavy Trucks Based on Dynamic Programming Algorithm. Appl. Sci. 2021, 11, 5555. https://doi.org/10.3390/app11125555
Zhang H, Zhao X, Yang J, Yang W. Shift Strategy Optimization for Automatic Transmission of Heavy Trucks Based on Dynamic Programming Algorithm. Applied Sciences. 2021; 11(12):5555. https://doi.org/10.3390/app11125555
Chicago/Turabian StyleZhang, Heng, Xinxin Zhao, Jue Yang, and Weiwei Yang. 2021. "Shift Strategy Optimization for Automatic Transmission of Heavy Trucks Based on Dynamic Programming Algorithm" Applied Sciences 11, no. 12: 5555. https://doi.org/10.3390/app11125555