
Multi-Step Traffic Speed Prediction Based on Ensemble Learning on an Urban Road Network


Abstract
:1. Introduction
- (1)
- Traffic prediction based on spatial-temporal characteristics.
- (2)
- Further exploration of Artificial Intelligence (AI) in traffic flow prediction.
- (3)
- Multi-step prediction for real-life ITS applications to provide relatively long-term future traffic situation for road users and government.
- (1)
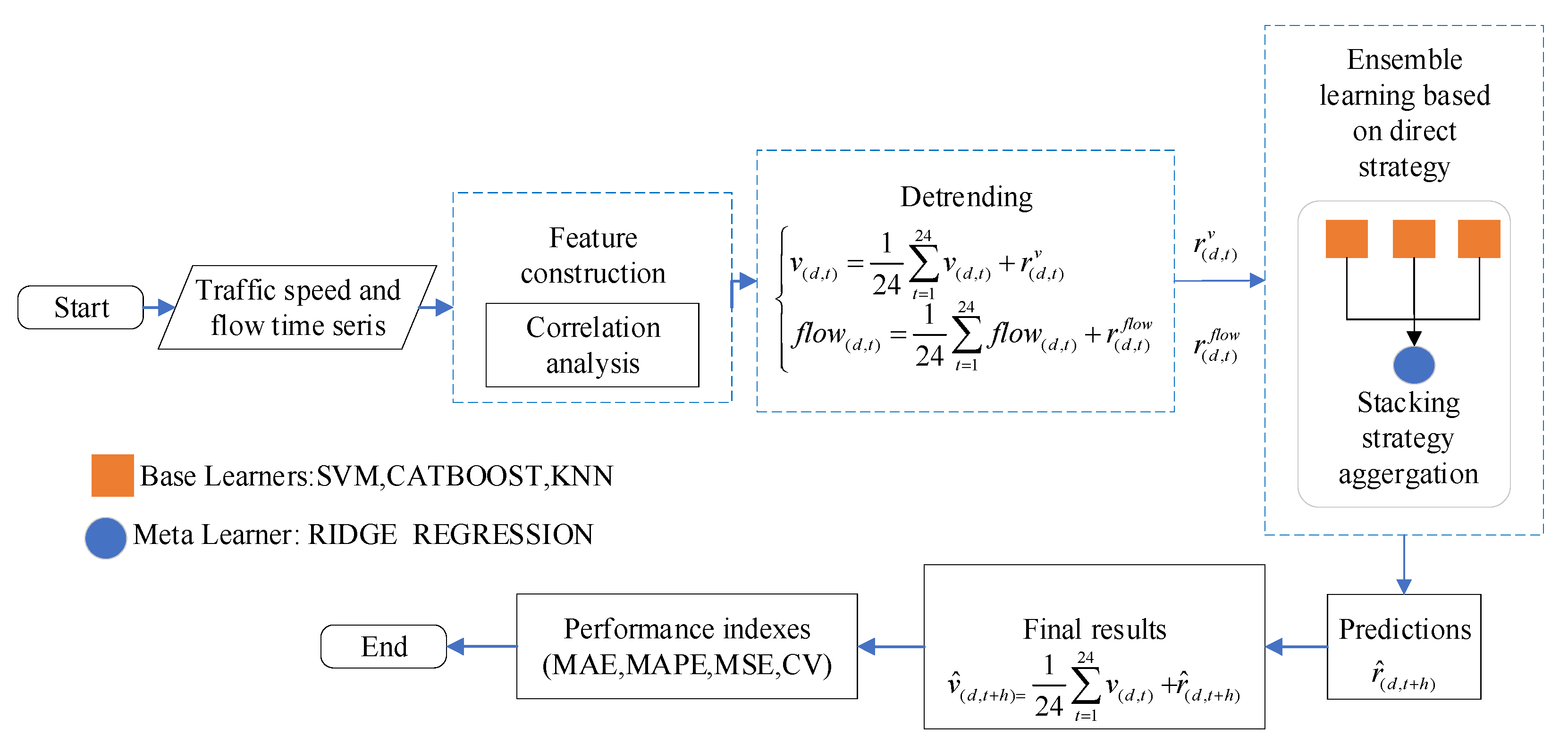
- A novel multi-step prediction with detrending and direct strategy is achieved by the ensemble learning model of stacking (DDSELM) to forecast travel speed using spatial-temporal characteristics.
- (2)
- The proposed multi-step model is validated by using a very large field dataset of hourly average link traffic speed, which reveals it has good performance.
2. Related Work
3. Prediction Methodology
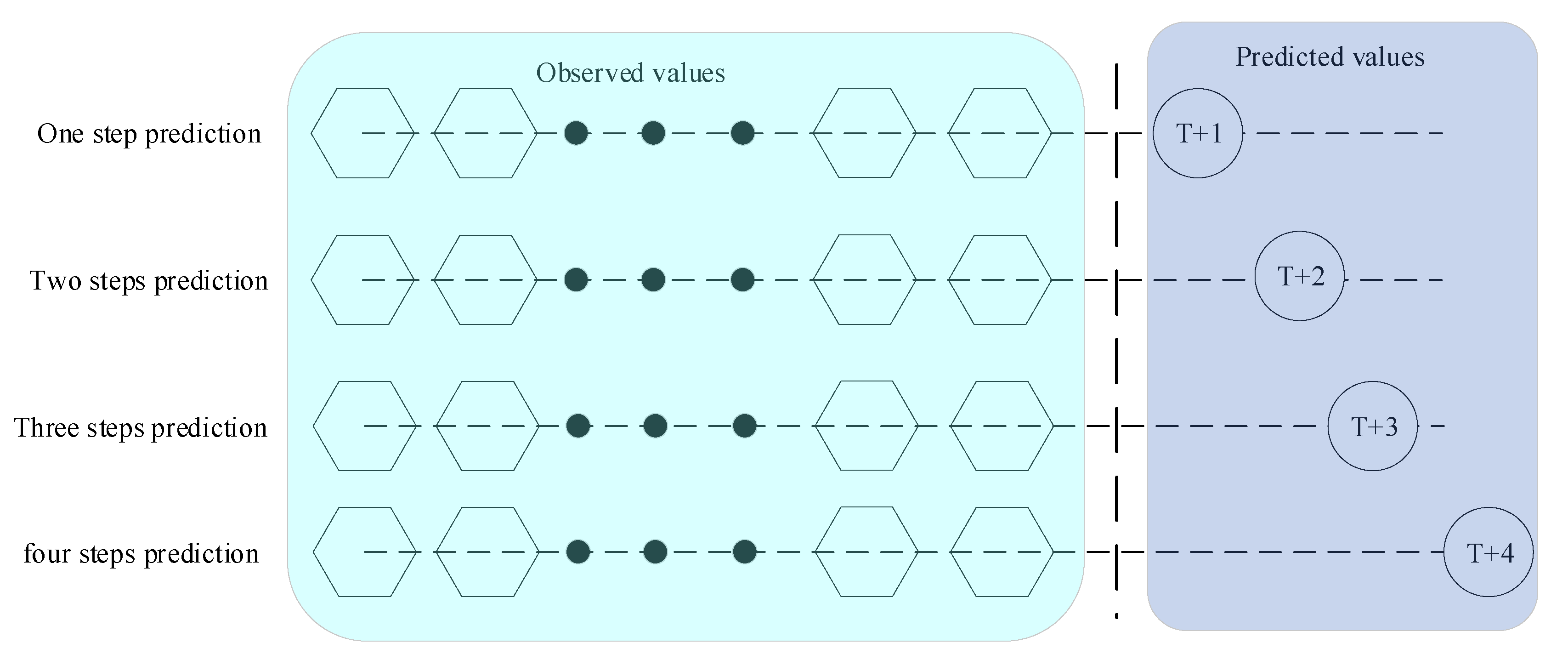
3.1. Direct Strategy
3.2. Feature Construction
3.3. Detrending
3.4. Ensemble Learning
3.5. Performance Indices
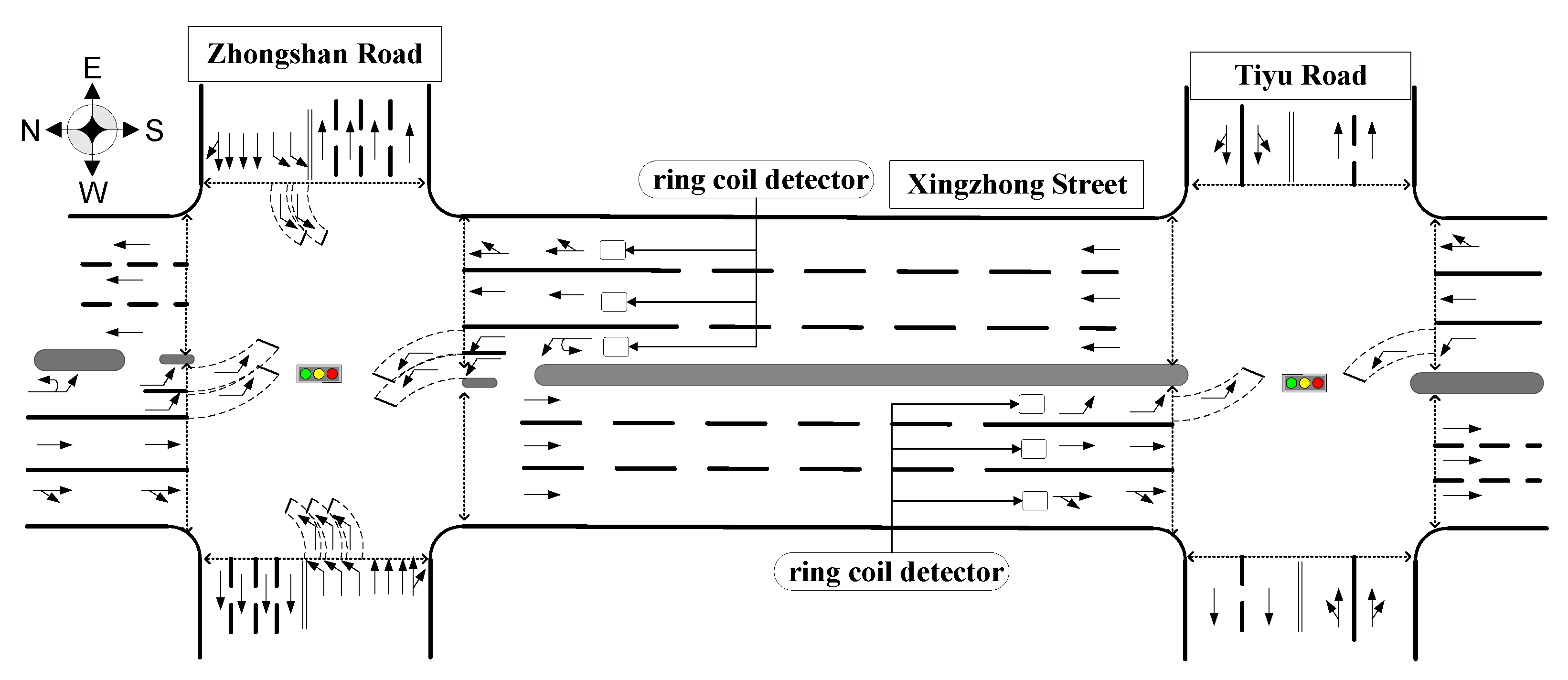
4. Case Study
5. Discussion
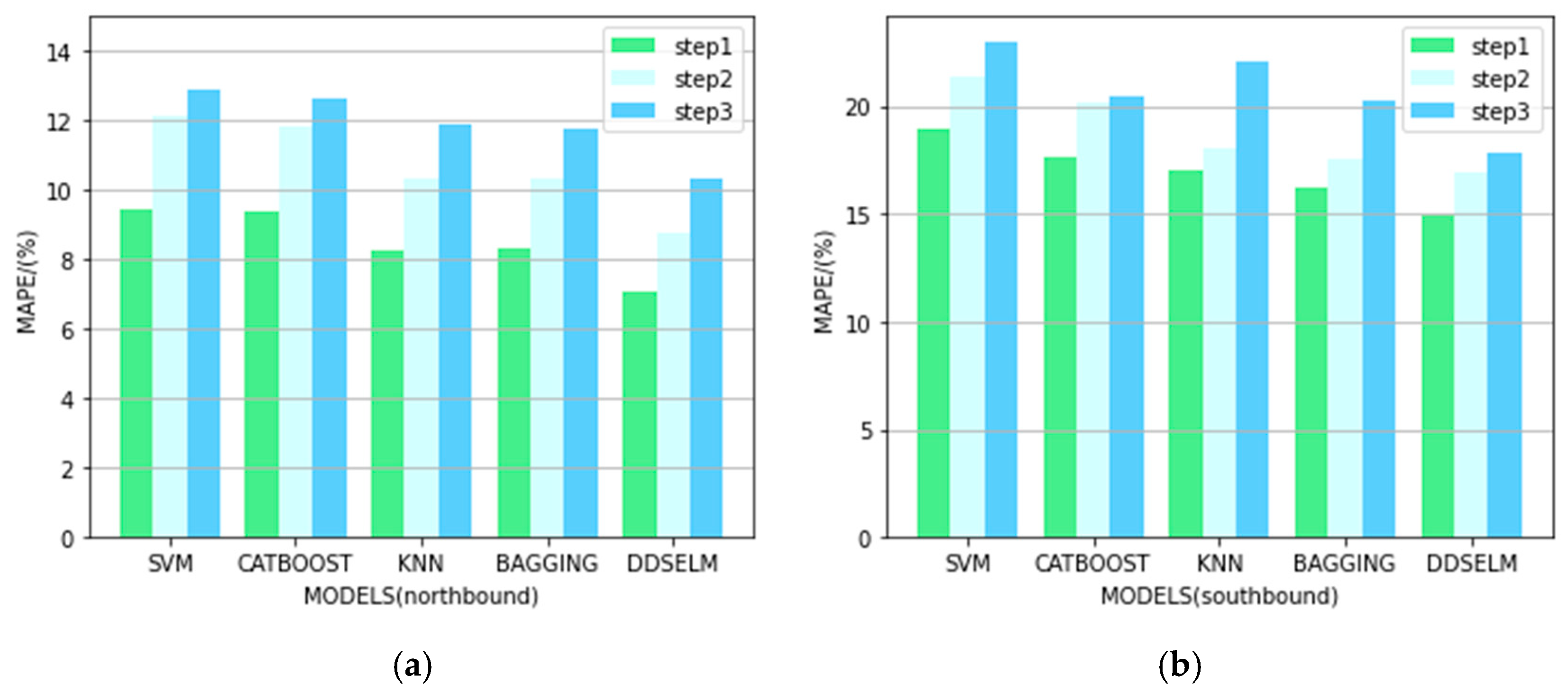
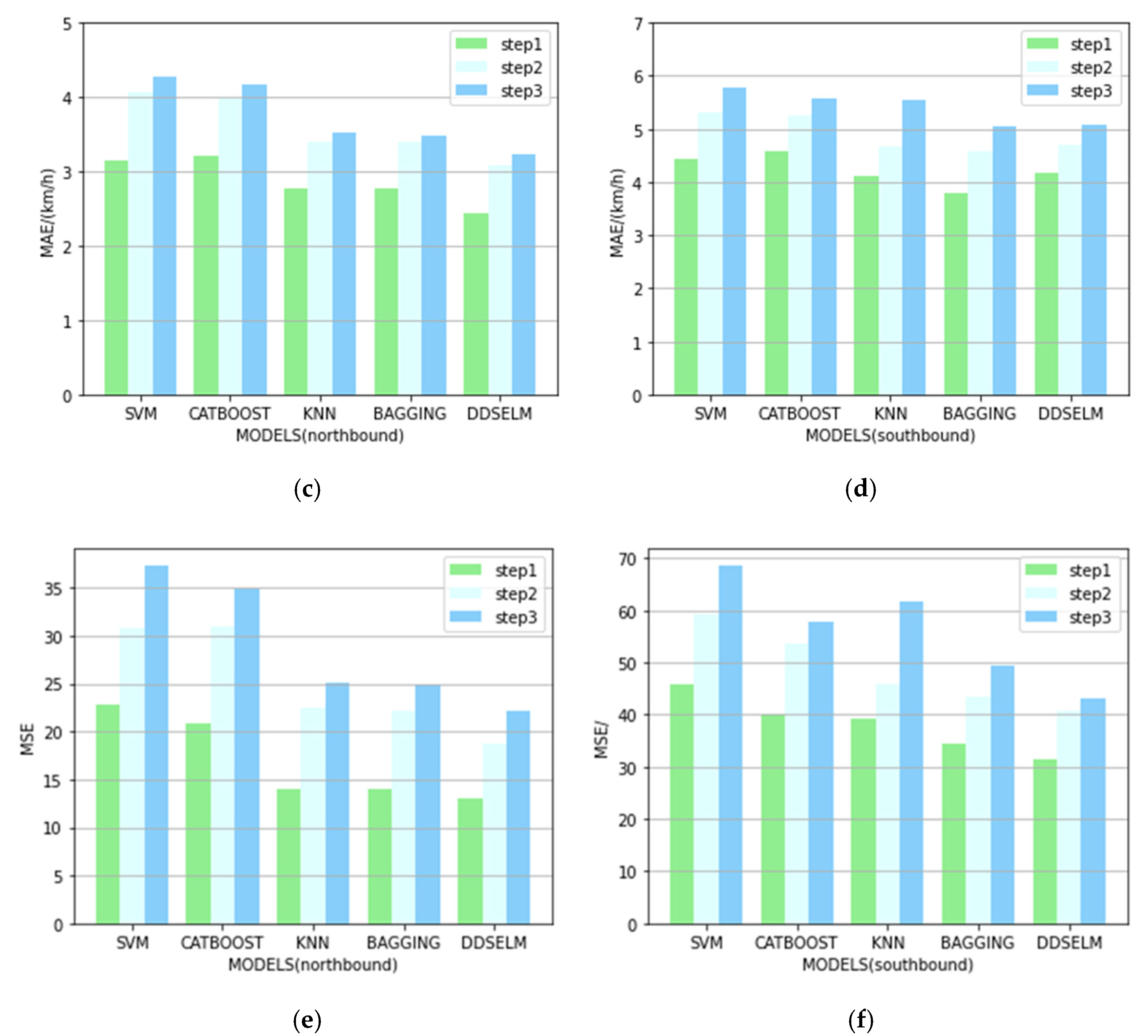
5.1. Prediction Accuracy
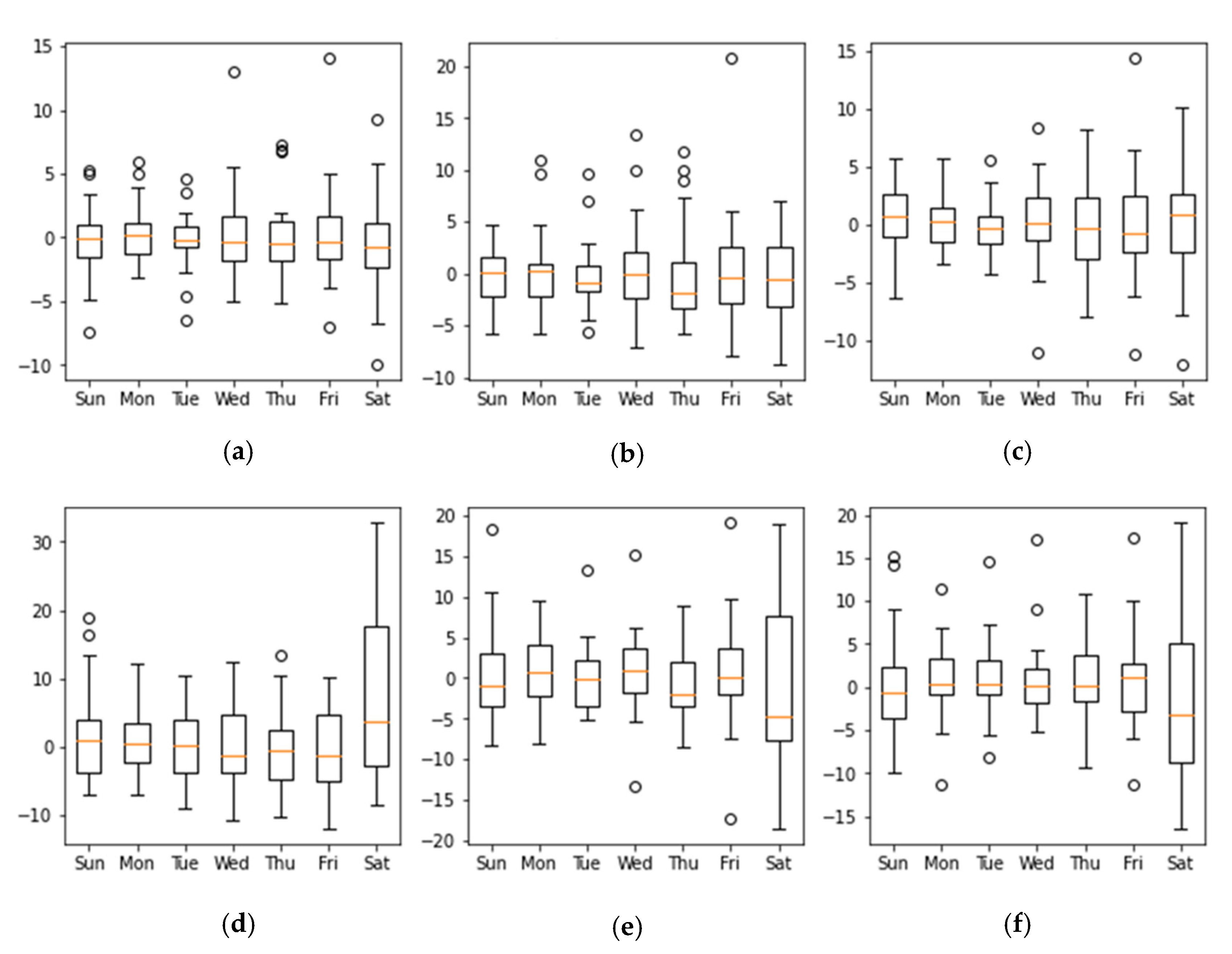
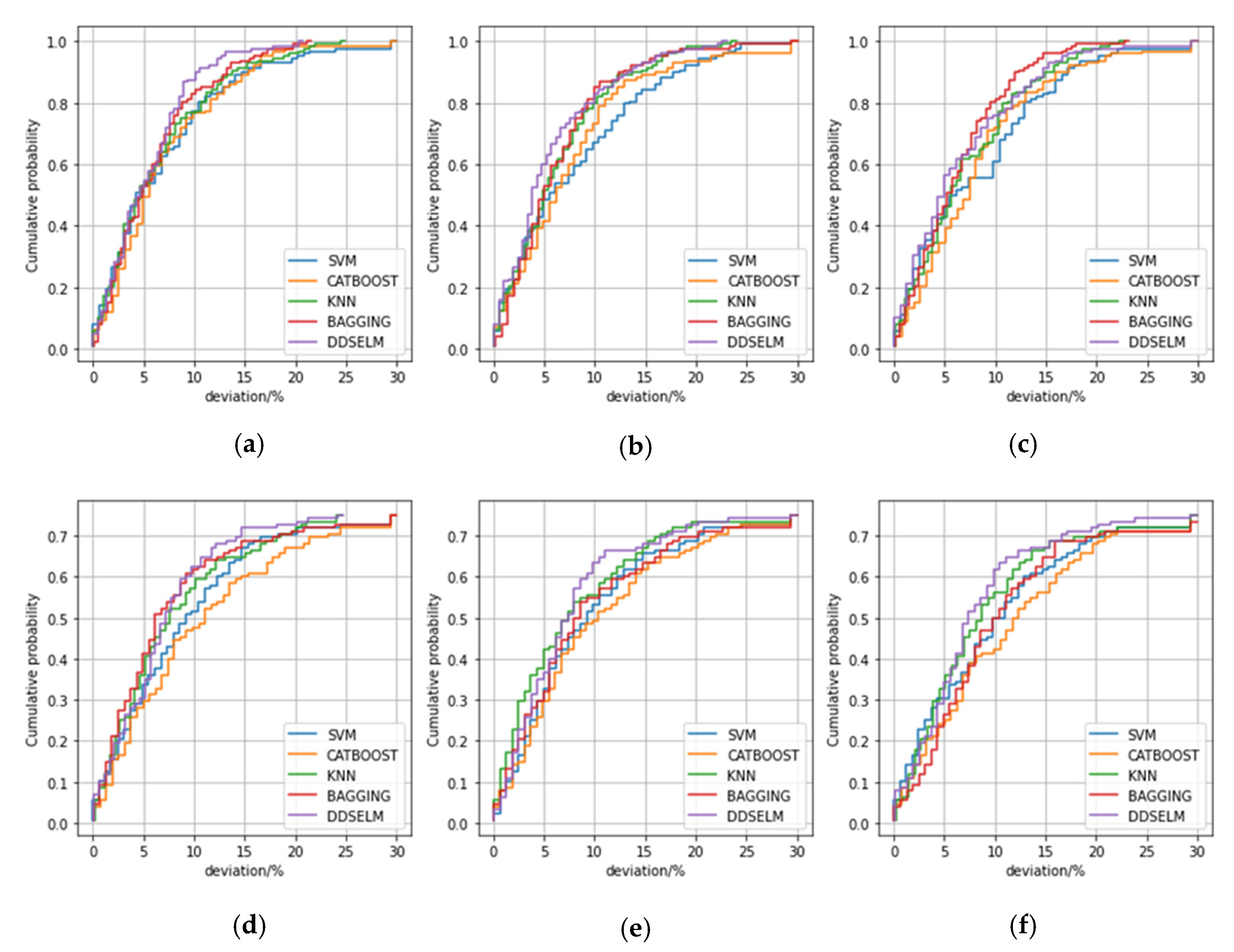
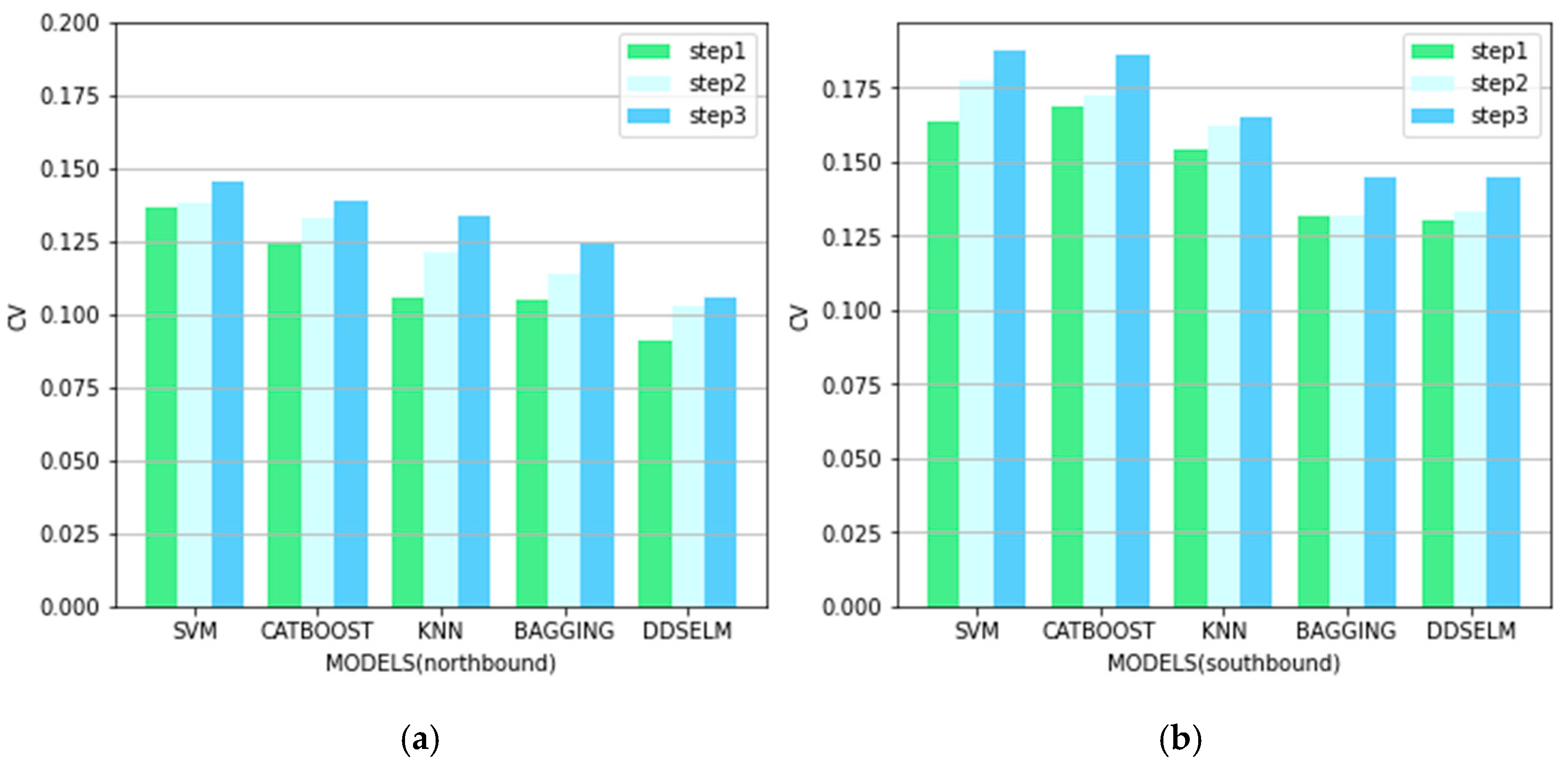
5.2. Prediction Stability
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, S.; Huang, R.; Gao, Y. Network-scale traffic modeling and forecasting with graphical lasso and neural networks. J. Transp. Eng. 2012, 11, 1358–1367. [Google Scholar] [CrossRef] [Green Version]
- Schrank, D.; Eisele, B.; Lomax, T. 2019 Urban Mobility Scorecard; Texas A&M Transportation Institute: College Station, TX, USA, 2019. [Google Scholar]
- Qureshi, K.N.; Abdul, H.A. A survey on intelligent transportation systems. Middle-East J. Sci. Res. 2013, 15, 629–642. [Google Scholar]
- Lin, Y.; Wang, P.; Ma, M. Intelligent transportation system (ITS): Concept, challenge and opportunity. In Proceedings of the IEEE 3rd International Conference on Big Data Security on Cloud (Big Data Security), IEEE International Conference on High Performance and Smart Computing (hpsc), and IEEE International Conference on Intelligent Data and Security (ids), Beijing, China, 26–28 May 2017. [Google Scholar]
- Tang, J.; Liu, F.; Zou, Y.; Zhang, W.; Wang, Y. An improved fuzzy neural network for traffic speed prediction considering periodic characteristic. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2340–2350. [Google Scholar] [CrossRef]
- Vlahogianni, E.; Matthew, G.; Golias, J. Short-term traffic forecasting: Where we are and where we’re going. Transp. Res. Part C Emerg. Technol. 2014, 43, 3–19. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, M.; Lin, X.; Wang, Y.; He, F. Multistep speed prediction on traffic networks: A deep learning approach considering spatio-temporal dependencies. Transp. Res. Part C Emerg. Technol. 2019, 105, 297–322. [Google Scholar] [CrossRef]
- Alajali, W.; Zhou, W.; Wen, S.; Wang, Y. Intersection Traffic Prediction Using Decision Tree Models. Symmetry 2018, 10, 386. [Google Scholar] [CrossRef] [Green Version]
- Chang, H.; Lee, Y.; Yoon, B.; Baek, S. Dynamic near-term traffic flow prediction: System-oriented approach based on past experiences. IET Intell. Transp. Syst. 2012, 6, 292–305. [Google Scholar] [CrossRef]
- Ahmed, M.; Cook, A. Analysis of freeway traffic time-series data by using Box-Jenkins techniques. Transp. Res. Rec. 1979, 722, 1–9. [Google Scholar]
- Voort, M.; Dougherty, M.; Watson, S. Combining Kohonen maps with ARIMA time series models to forecast traffic flow. Transp. Res. Part C Emerg. Technol. 1996, 4, 307–318. [Google Scholar] [CrossRef] [Green Version]
- Williams, B.; Hoel, L. Modeling and forecasting vehicular traffic flow as a seasonal ARIMA process: Theoretical basis and empirical results. J. Transp. Eng. 2003, 129, 664–672. [Google Scholar] [CrossRef] [Green Version]
- Kumar, S.; Lelitha, V. Short-term traffic flow prediction using seasonal ARIMA model with limited input data. Eur. Transp. Res. Rev. 2015, 7, 21. [Google Scholar] [CrossRef] [Green Version]
- Okutani, I.; Stephanedes, Y. Dynamic prediction of traffic volume through Kalman filtering theory. Transp. Res. Part Meth. 1984, 18, 1–11. [Google Scholar] [CrossRef]
- Guo, J.; Huang, W.; Williams, B. Adaptive Kalman filter approach for stochastic short-term traffic flow rate prediction and uncertainty quantification. Transp. Res. Part C Emerg. Technol. 2014, 43, 50–64. [Google Scholar] [CrossRef]
- Mir, Z.; Filali, F. An adaptive Kalman filter based traffic prediction algorithm for urban road network. In Proceedings of the IEEE 12th International Conference on Innovations in Information Technology (IIT), Al-Ain, United Arab Emirates, 28–30 November 2016. [Google Scholar]
- Zambrano-Martinez, J.; Calafate, C.; Soler, D.; Lemus-Zúñiga, L.; Cano, J.; Manzoni, P.; Gayraud, T. A centralized route-management solution for autonomous vehicles in urban areas. Electronics 2019, 8, 722. [Google Scholar] [CrossRef] [Green Version]
- Vlahogianni, E.; Golias, J.; Matthew, G. Short-term traffic forecasting: Overview of objectives and methods. Transp. Rev. 2004, 24, 533–557. [Google Scholar] [CrossRef]
- Dougherty, M. A review of neural networks applied to transport. Transp. Res. Part C Emerg. Technol. 1995, 3, 247–260. [Google Scholar] [CrossRef]
- Vlahogianni, E.; Matthew, G.; Golias, J. Optimized and meta-optimized neural networks for short-term traffic flow prediction: A genetic approach. Transp. Res. Part C Emerg. Technol. 2005, 13, 211–234. [Google Scholar]
- Zhang, N.; Guan, X.; Cao, J.; Wang, X.; Wu, H. Wavelet-HST: A Wavelet-Based Higher-Order Spatio-Temporal Framework for Urban Traffic Speed Prediction. IEEE Access 2019, 7, 118446–118458. [Google Scholar] [CrossRef]
- Cai, P.; Wang, Y.; Lu, G.; Chen, P.; Ding, C.; Sun, J. A spatiotemporal correlative k-nearest neighbor model for short-term traffic multistep forecasting. Transp. Res. Part C Emerg. Technol. 2016, 62, 21–34. [Google Scholar] [CrossRef]
- Ma, X.; Tao, Z.; Wang, Y.; Yu, H.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C Emerg. Technol. 2015, 54, 187–197. [Google Scholar] [CrossRef]
- Yao, B.; Chen, C.; Cao, Q.; Jin, L.; Zhang, M. Short-term traffic speed prediction for an urban corridor. Comput. Aided Civ. Inf. 2017, 32, 154–169. [Google Scholar] [CrossRef]
- Dong, X.; Lei, T.; Jin, S.; Hou, Z. Short-Term Traffic Flow Prediction Based on XGBoost. In Proceedings of the IEEE 7th Data Driven Control and Learning Systems Conference (DDCLS), Enshi, China, 25–27 May 2018. [Google Scholar]
- Yao, X.; Liu, Y. Ensemble structure of evolutionary artificial neural networks. In Proceedings of the IEEE International Conference on Evolutionary Computation, Nagoya, Japan, 20–22 May 1996. [Google Scholar]
- Vennelakanti, A.; Shreya, S.; Rajendran, R.; Sarkar, D.; Muddegowda, D.; Hanagal, P. Traffic sign detection and recognition using a cnn ensemble. In Proceedings of the IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–13 January 2019. [Google Scholar]
- Lukáš, R. Traffic speed prediction using ensemble kalman filter and differential evolution. In Proceedings of the 6th International Conference on Traffic and Logistic Engineering (ICTLE 2018), Bangkok, Thailand, 3–5 August 2018. [Google Scholar]
- Xiao, J.; Xiao, Z.; Wang, D.; Bai, J.; Havyarimana, V.; Zeng, F. Short-term traffic volume prediction by ensemble learning in concept drifting environments. Knowl.-Based Syst. 2019, 164, 213–225. [Google Scholar] [CrossRef]
- Xiao, J. SVM and KNN ensemble learning for traffic incident detection. Phys. A Stat. Mech. Appl. 2019, 517, 29–35. [Google Scholar] [CrossRef]
- Zhang, S.; Zhou, L.; Chen, X.; Zhang, L.; Li, L.; Li, M. Network-wide traffic speed forecasting: 3D convolutional neural network with ensemble empirical mode decomposition. Comput. Aided Civ. Inf. 2020, 35, 1132–1147. [Google Scholar] [CrossRef]
- Papathanasopoulou, V.; Markou, I.; Antoniou, C. Online calibration for microscopic traffic simulation and dynamic multi-step prediction of traffic speed. Transp. Res. Part C Emerg. Technol. 2016, 68, 144–159. [Google Scholar] [CrossRef]
- Cox, D. Prediction by exponentially weighted moving averages and related methods. J. R. Stat. Soc. Ser. B (Methodol.) 1961, 23, 414–422. [Google Scholar] [CrossRef]
- Zhan, X.; Zhang, S.; Szeto, W.; Chen, X. Multi-step-ahead traffic speed forecasting using multi-output gradient boosting regression tree. J. Intell. Transp. Syst. 2020, 24, 125–141. [Google Scholar] [CrossRef]
- Pearson, K. Mathematical contributions to the theory of evolution (III): Regression, heredity, and panmixia. Philos. Trans. R. Soc. Lond. Ser. A 1895, 187, 253–318. [Google Scholar]
- Li, Z.; Li, Y.; Li, L. A comparison of detrending models and multi-regime models for traffic flow prediction. IEEE Intell. Transp. Syst. Mag. 2014, 6, 34–44. [Google Scholar]
- Ren, Y.; Zhang, L.; Suganthan, P. Ensemble classification and regression-recent developments, applications and future directions. IEEE Comput. Intell. Mag. 2016, 11, 41–53. [Google Scholar] [CrossRef]
- Wolpert, D. Stacked generalization. Neu. Netw. 1992, 5, 241–259. [Google Scholar] [CrossRef]
- Feng, B.; Xu, J.; Lin, Y.; Li, P. A period-specific combined traffic flow prediction based on travel speed clustering. IEEE Access 2020, 8, 85880–85889. [Google Scholar] [CrossRef]
- Zheng, L.; Yang, J.; Chen, L.; Sun, D.; Liu, W. Dynamic spatial-temporal feature optimization with ERI big data for Short-term traffic flow prediction. Neurocomputing 2020, 412, 339–350. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Representative Feature | Descriptions |
|---|---|
| v(d,t) | Speed at time t, day d |
| v(d−1,t) | Speed at time t, day d − 1 |
| v(d−2,t) | Speed at time t, day d − 2 |
| v(d−3,t) | Speed at time t, day d − 3 |
| v(d−1,t+1) | Speed at time t + 1, day d − 1 |
| v(d−2,t+1) | Speed at time t + 1, day d − 2 |
| v(d−3,t+1) | Speed at time t + 1, day d − 3 |
| v(u,t) | Upstream speed at time t, day d |
| v(d,t) | Downstream speed at time t, day d |
| flow(d,t) | Flow at time t, day d |
| v(d,t) | v(d−1,t) | v(d−2,t) | v(d−3,t) | v(d−1,t+1) | v(d−2,t+1) | v(d−3,t+1) | flow(d,t) | v1(d,t) | v2(d,t) | |
|---|---|---|---|---|---|---|---|---|---|---|
| v(d,t) | 1 | 0.835 | 0.813 | 0.808 | 0.687 | 0.684 | 0.675 | −0.801 | 0.782 | 0.874 |
| v(d−1,t) | 0.835 | 1 | 0.835 | 0.811 | 0.732 | 0.685 | 0.687 | −0.796 | 0.775 | 0.823 |
| v(d−2,t) | 0.813 | 0.835 | 1 | 0.835 | 0.695 | 0.736 | 0.685 | −0.793 | 0.751 | 0.796 |
| v(d−3,t) | 0.808 | 0.811 | 0.835 | 1 | 0.690 | 0.695 | 0.734 | −0.797 | 0.734 | 0.803 |
| v(d−1,t+1) | 0.687 | 0.732 | 0.695 | 0.690 | 1 | 0.835 | 0.811 | −0.750 | 0.689 | 0.692 |
| v(d−2,t+1) | 0.684 | 0.685 | 0.736 | 0.695 | 0.835 | 1 | 0.835 | −0.739 | 0.668 | 0.671 |
| v(d−3,t+1) | 0.675 | 0.687 | 0.685 | 0.734 | 0.811 | 0.835 | 1 | −0.737 | 0.644 | 0.680 |
| flow(d,t) | −0.801 | −0.796 | −0.793 | −0.797 | −0.750 | −0.739 | −0.737 | 1 | −0.772 | −0.829 |
| v1(d,t) | 0.782 | 0.775 | 0.751 | 0.734 | 0.689 | 0.668 | 0.644 | −0.772 | 1 | 0.815 |
| v2(d,t) | 0.874 | 0.823 | 0.796 | 0.803 | 0.692 | 0.671 | 0.680 | −0.829 | 0.815 | 1 |
| v(d,t) | v(d−1,t) | v(d−2,t) | v(d−3,t) | v(d−1,t+1) | v(d−2,t+1) | v(d−3,t+1) | flow(d,t) | v1(d,t) | v2(d,t) | |
|---|---|---|---|---|---|---|---|---|---|---|
| v(d,t) | 1 | 0.752 | 0.716 | 0.706 | 0.540 | 0.518 | 0.536 | −0.694 | 0.834 | 0.870 |
| v(d−1,t) | 0.752 | 1 | 0.778 | 0.735 | 0.614 | 0.562 | 0.543 | −0.716 | 0.757 | 0.789 |
| v(d−2,t) | 0.716 | 0.778 | 1 | 0.773 | 0.557 | 0.614 | 0.563 | −0.712 | 0.700 | 0.766 |
| v(d−3,t) | 0.706 | 0.735 | 0.773 | 1 | 0.543 | 0.554 | 0.616 | −0.697 | 0.687 | 0.784 |
| v(d−1,t+1) | 0.540 | 0.614 | 0.557 | 0.543 | 1 | 0.778 | 0.735 | −0.639 | 0.528 | 0.603 |
| v(d−2,t+1) | 0.518 | 0.562 | 0.614 | 0.554 | 0.778 | 1 | 0.773 | −0.627 | 0.515 | 0.592 |
| v(d−3,t+1) | 0.536 | 0.543 | 0.563 | 0.616 | 0.735 | 0.773 | 1 | −0.623 | 0.508 | 0.604 |
| flow(d,t) | −0.694 | −0.716 | −0.712 | −0.697 | −0.639 | −0.627 | −0.623 | 1 | −0.699 | −0.773 |
| v1(d,t) | 0.834 | 0.757 | 0.700 | 0.687 | 0.528 | 0.515 | 0.508 | −0.699 | 1 | 0.809 |
| v2(d,t) | 0.870 | 0.789 | 0.766 | 0.784 | 0.603 | 0.592 | 0.604 | −0.773 | 0.809 | 1 |
| Representative Feature | Descriptions |
|---|---|
| Predicted speed difference between predicted speed and daily average value at time t + h belonging to the dth day | |
| h | Prediction time step into the future, h ≥ 1 |
| Speed difference between measured speed and daily average value at time t belonging to the dth day | |
| Speed difference between measured speed and daily average value at time t belonging to the d-1th day | |
| Speed difference between measured speed and daily average value at time t belonging to the d-2th day | |
| Speed difference between measured speed and daily average value at time t belonging to the d-3th day | |
| Flow difference between measured traffic flow and daily average value at time t belonging to the dth day | |
| Upstream speed difference between measured speed and daily average value at time t belonging to the dth day | |
| Downstream speed difference between measured speed and daily average value at time t belonging to the dth day |
| Model | Base Learner | Mega Learner | Descriptions |
|---|---|---|---|
| KNN | √ | n_neighbors = 3 | |
| CATBOOST | √ | Depth = 8, learning_rate = 0.8, loss_function = ‘RMSE’, random_seed = 18 | |
| SVM | √ | C = 100, gamma = 0.01, kernel = ‘rbf’ | |
| RIDGE REGRESSION | √ | Alpha = 17, random_state = 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, B.; Xu, J.; Zhang, Y.; Lin, Y. Multi-Step Traffic Speed Prediction Based on Ensemble Learning on an Urban Road Network. Appl. Sci. 2021, 11, 4423. https://doi.org/10.3390/app11104423
Feng B, Xu J, Zhang Y, Lin Y. Multi-Step Traffic Speed Prediction Based on Ensemble Learning on an Urban Road Network. Applied Sciences. 2021; 11(10):4423. https://doi.org/10.3390/app11104423
Chicago/Turabian StyleFeng, Bin, Jianmin Xu, Yonggang Zhang, and Yongjie Lin. 2021. "Multi-Step Traffic Speed Prediction Based on Ensemble Learning on an Urban Road Network" Applied Sciences 11, no. 10: 4423. https://doi.org/10.3390/app11104423