
Direct Calculation of the Group Velocity for Two-Dimensional Complex, Composite and Periodic Structures Using a Wave and Finite Element Scheme



Abstract
:1. Introduction
- It is capable of handling both periodic and layered composite structures.
- It is relatively easier to implement and does not require custom FE formulation.
- It is computationally efficient and has minimal memory requirements.
2. Dispersion Curve Calculation
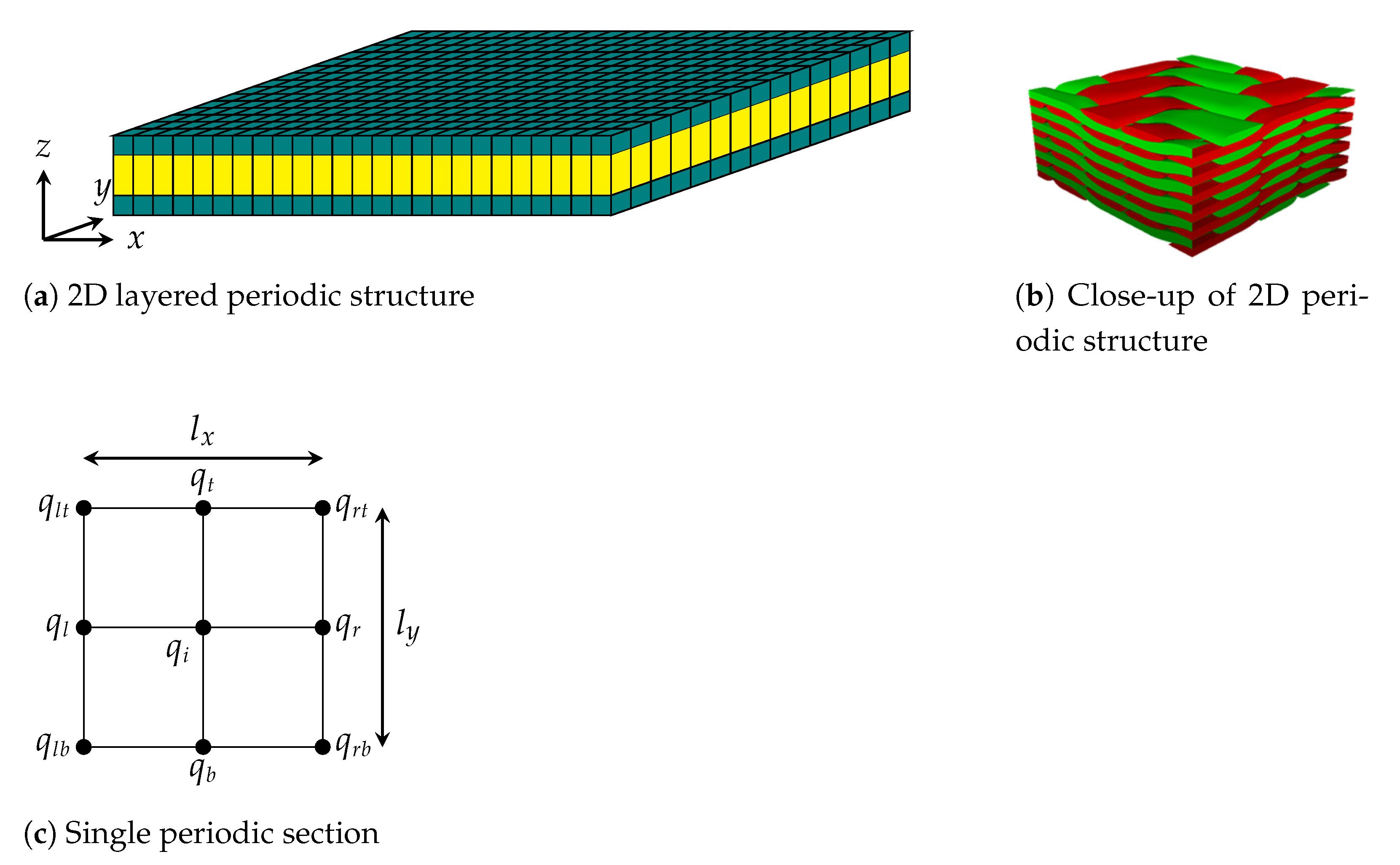
2.1. Wave and Finite Element Scheme
2.2. Energy and Power Considerations
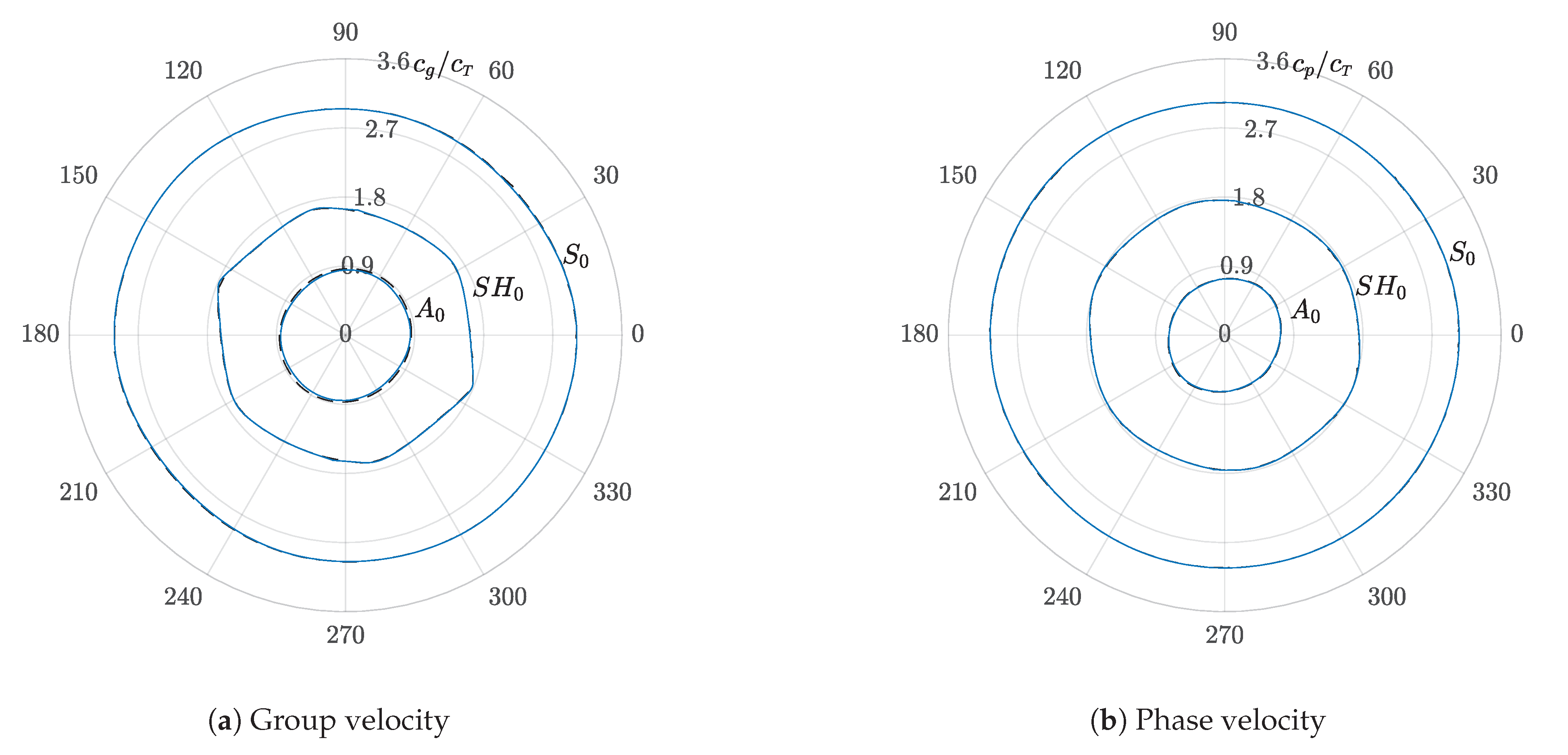
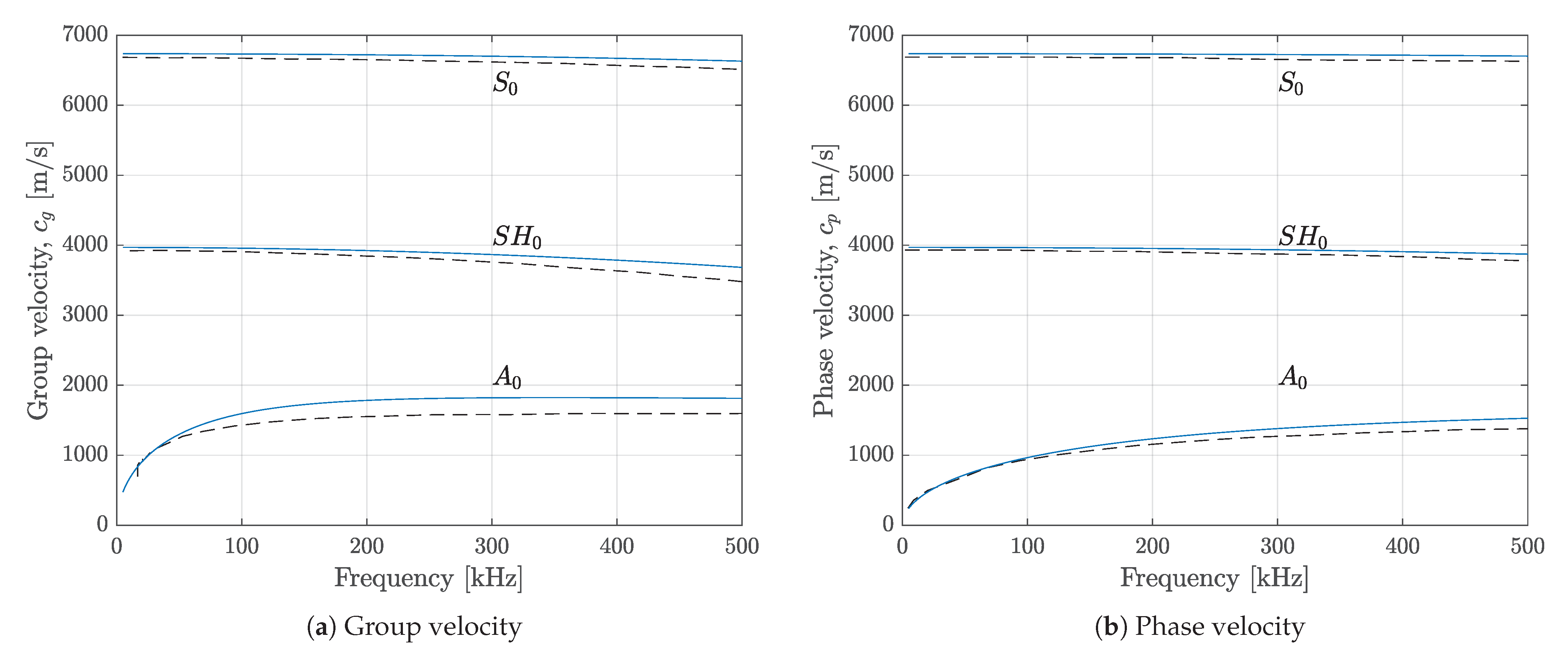
2.3. Velocity Dispersion Curves
| Algorithm 1: Group and phase velocity calculation |
 |
3. Comparison with the Literature
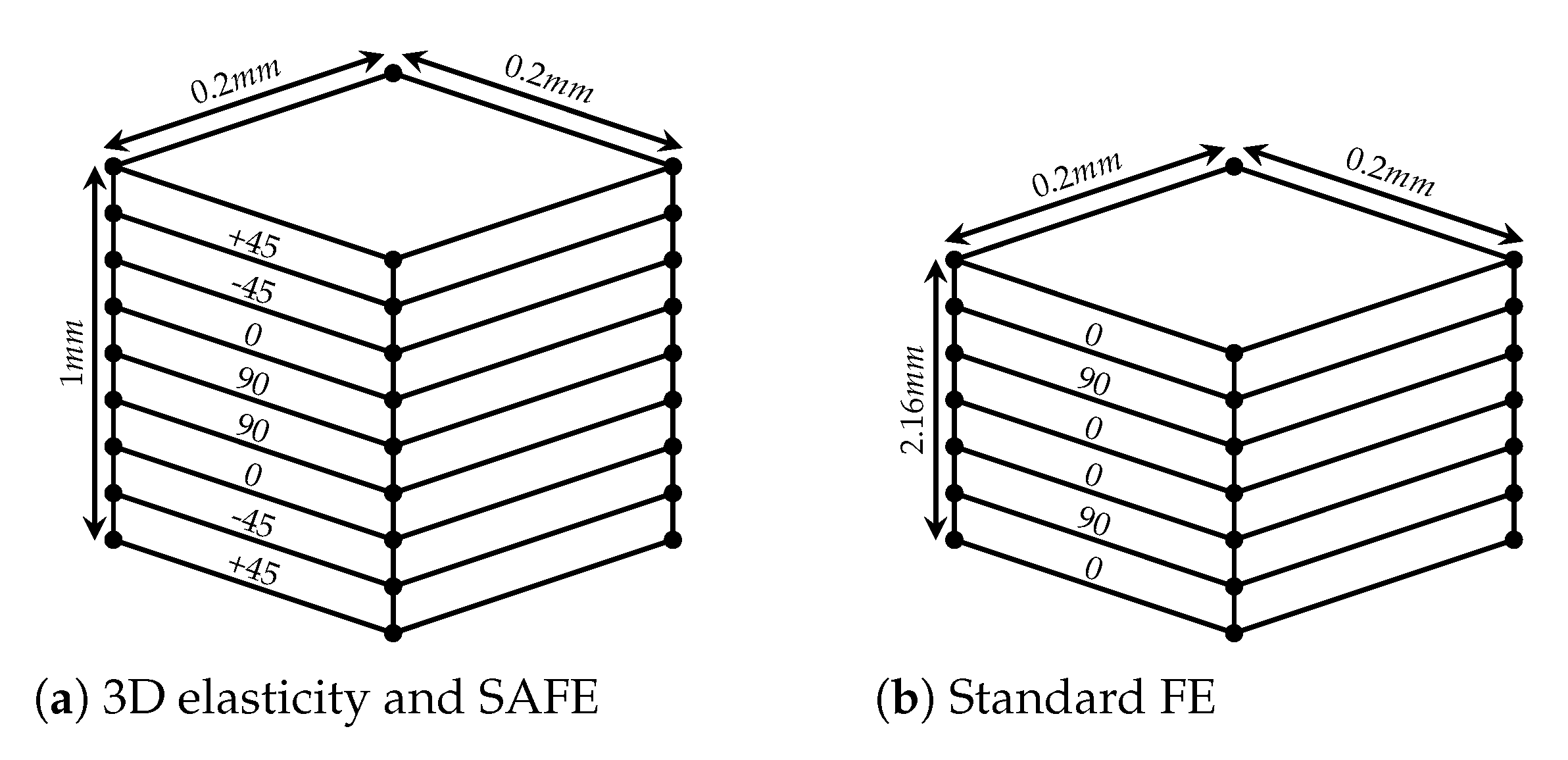
3.1. 3D Elasticity Theory
3.2. Semi-Analytical Finite Element (SAFE) Method
3.3. Standard Finite Element
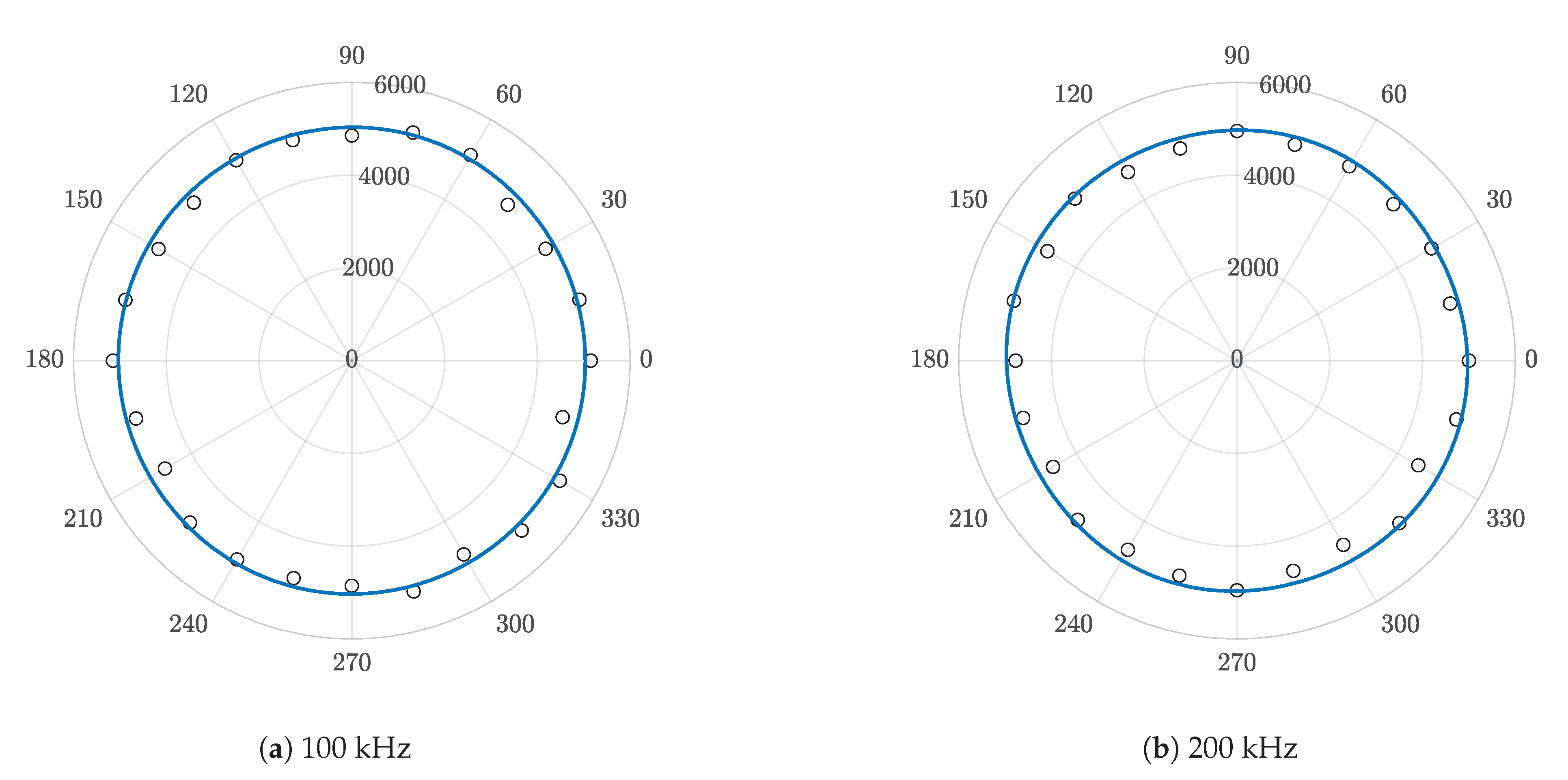
4. Comparison with Experimental Results
5. Discussion
6. Conclusions and Outlook
- The technique is easy to implement using the standard FE method without the need for custom formulations.
- It is capable of calculating dispersion properties for arbitrary layered plate-like structures.
- The periodic section is modelled with very few elements, which makes it highly efficient and computationally cheap.
- The theory of the WFE method enables the technique to be used for truly periodic structures, such as textile composites, which cannot be modelled with any existing technique.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dienel, C.P.; Meyer, H.; Werwer, M.; Willberg, C. Estimation of airframe weight reduction by integration of piezoelectric and guided wave–based structural health monitoring. Struct. Health Monit. 2019, 18, 1778–1788. [Google Scholar] [CrossRef] [Green Version]
- Büyüköztürk, O. Imaging of concrete structures. NDT E Int. 1998, 31, 233–243. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural Health Monitoring of Aerospace Composites; Academic Press: Oxford, UK, 2015. [Google Scholar]
- Helifa, B.; Oulhadj, A.; Benbelghit, A.; Lefkaier, I.; Boubenider, F.; Boutassouna, D. Detection and measurement of surface cracks in ferromagnetic materials using eddy current testing. NDT E Int. 2006, 39, 384–390. [Google Scholar] [CrossRef]
- Krautkramer, J.; Krautkramer, H. Ultrasonic Testing of Materials, 4th ed.; Springer: Berlin, Germany, 1990. [Google Scholar]
- Talreja, R.; Singh, C.V. Damage and Failure of Composite Materials; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Banerjee, S.; Ricci, F.; Monaco, E.; Mal, A. A wave propagation and vibration-based approach for damage identification in structural components. J. Sound Vib. 2009, 322, 167–183. [Google Scholar] [CrossRef]
- Gangadharan, R.; Mahapatra, D.R.; Gopalakrishnan, S.; Murthy, C.; Bhat, M. On the sensitivity of elastic waves due to structural damages: Time–frequency based indexing method. J. Sound Vib. 2009, 320, 915–941. [Google Scholar] [CrossRef]
- Aggelis, D.; Matikas, T. Effect of plate wave dispersion on the acoustic emission parameters in metals. Comput. Struct. 2012, 98, 17–22. [Google Scholar] [CrossRef]
- Farrar, C.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective; John Wiley and Sons: New York, NY, USA, 2012. [Google Scholar]
- Cantero-Chinchilla, S.; Chiachío, J.; Chiachío, M.; Chronopoulos, D.; Jones, A. A robust Bayesian methodology for damage localization in plate-like structures using ultrasonic guided-waves. Mech. Syst. Signal Process. 2019, 122, 192–205. [Google Scholar] [CrossRef] [Green Version]
- Shen, Y.; Giurgiutiu, V. Effective non-reflective boundary for Lamb waves: Theory, finite element implementation, and applications. Wave Motion 2015, 58, 22–41. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Yuan, F. Group velocity and characteristic wave curves of Lamb waves in composites: Modeling and experiments. Compos. Sci. Technol. 2007, 67, 1370–1384. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Chimenti, D.E. Free Wave Propagation in Plates of General Anisotropic Media. J. Appl. Mech. 1989, 56, 881–886. [Google Scholar] [CrossRef] [Green Version]
- Nayfeh, A.H. The general problem of elastic wave propagation in multilayered anisotropic media. J. Acoust. Soc. Am. 1991, 89, 1521–1531. [Google Scholar] [CrossRef]
- Moon, F.C. Wave surfaces due to impact on anisotropic plates. J. Compos. Mater. 1972, 6, 62–79. [Google Scholar] [CrossRef]
- Whitney, J.; Sun, C. A higher order theory for extensional motion of laminated composites. J. Sound Vib. 1973, 30, 85–97. [Google Scholar] [CrossRef]
- Hakoda, C.; Lissenden, C.J. Application of a general expression for the group velocity vector of elastodynamic guided waves. J. Sound Vib. 2020, 469, 115165. [Google Scholar] [CrossRef]
- Ahmad, Z.; Vivar-Perez, J.M.; Gabbert, U. Semi-analytical finite element method for modeling of lamb wave propagation. CEAS Aeronaut. J. 2013, 4, 21–33. [Google Scholar] [CrossRef]
- Thierry, V.; Brown, L.; Chronopoulos, D. Multi-scale wave propagation modelling for two-dimensional periodic textile composites. Compos. Part B Eng. 2018, 150, 144–156. [Google Scholar] [CrossRef] [Green Version]
- Gravenkamp, H.; Birk, C.; Song, C. Simulation of elastic guided waves interacting with defects in arbitrarily long structures using the scaled boundary finite element method. J. Comput. Phys. 2015, 295, 438–455. [Google Scholar] [CrossRef]
- Mace, B.R.; Manconi, E. Modelling wave propagation in two-dimensional structures using finite element analysis. J. Sound Vib. 2008, 318, 884–902. [Google Scholar] [CrossRef]
- Chronopoulos, D.; Droz, C.; Apalowo, R.; Ichchou, M.; Yan, W. Accurate structural identification for layered composite structures, through a wave and finite element scheme. Compos. Struct. 2017, 182, 566–578. [Google Scholar] [CrossRef] [Green Version]
- Apalowo, R.; Chronopoulos, D.; Tanner, G. Wave Interaction with Defects in Pressurised Composite Structures. J. Nondestruct. Eval. 2018, 37, 48. [Google Scholar] [CrossRef] [Green Version]
- Malik, M.K.; Chronopoulos, D.; Tanner, G. Transient ultrasonic guided wave simulation in layered composite structures using a hybrid wave and finite element scheme. Compos. Struct. 2020, 246, 112376. [Google Scholar] [CrossRef]
- Chronopoulos, D. Wave steering effects in anisotropic composite structures: Direct calculation of the energy skew angle through a finite element scheme. Ultrasonics 2017, 73, 43–48. [Google Scholar] [CrossRef] [Green Version]
- Aly, N.M. A review on utilization of textile composites in transportation towards sustainability. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Bristol, UK, 2017; Volume 254, p. 042002. [Google Scholar]
- Mitrou, G.; Ferguson, N.; Renno, J. Wave transmission through two-dimensional structures by the hybrid FE/WFE approach. J. Sound Vib. 2017, 389, 484–501. [Google Scholar] [CrossRef] [Green Version]
- Waki, Y.; Mace, B.; Brennan, M. Numerical issues concerning the wave and finite element method for free and forced vibrations of waveguides. J. Sound Vib. 2009, 327, 92–108. [Google Scholar] [CrossRef]
- Renno, J.M.; Mace, B.R. Calculation of reflection and transmission coefficients of joints using a hybrid finite element/wave and finite element approach. J. Sound Vib. 2013, 332, 2149–2164. [Google Scholar] [CrossRef]
- Mace, B.R.; Duhamel, D.; Brennan, M.J.; Hinke, L. Finite element prediction of wave motion in structural waveguides. J. Acoust. Soc. Am. 2005, 117, 2835–2843. [Google Scholar] [CrossRef]
- Zhong, W.; Williams, F. On the direct solution of wave propagation for repetitive structures. J. Sound Vib. 1995, 181, 485–501. [Google Scholar] [CrossRef]
- Allemang, R.J. The modal assurance criterion—Twenty years of use and abuse. Sound Vib. 2003, 37, 14–23. [Google Scholar]
- Hakoda, C.; Lissenden, C.J. Using the partial wave method for mode-sorting of elastodynamic guided waves. In AIP Conference Proceedings; AIP Publishing LLC: New York, NY, USA, 2019; Volume 2102, p. 020014. [Google Scholar]
- Bartoli, I.; Marzani, A.; Di Scalea, F.L.; Viola, E. Modeling wave propagation in damped waveguides of arbitrary cross-section. J. Sound Vib. 2006, 295, 685–707. [Google Scholar] [CrossRef]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar] [CrossRef]
- Sorohan, Ş.; Constantin, N.; Găvan, M.; Anghel, V. Extraction of dispersion curves for waves propagating in free complex waveguides by standard finite element codes. Ultrasonics 2011, 51, 503–515. [Google Scholar] [CrossRef] [PubMed]
- Åberg, M.; Gudmundson, P. The usage of standard finite element codes for computation of dispersion relations in materials with periodic microstructure. J. Acoust. Soc. Am. 1997, 102, 2007–2013. [Google Scholar] [CrossRef]
- Taupin, L.; Lhémery, A.; Inquiété, G. A detailed study of guided wave propagation in a viscoelastic multilayered anisotropic plate. In Journal of Physics: Conference Series; IOP Publishing: Bristol, UK, 2011; Volume 269, p. 012002. [Google Scholar]
- Cantero-Chinchilla, S.; Malik, M.K.; Chronopoulos, D.; Chiachío, J. Bayesian damage localization and identification based on a transient wave propagation model for composite beam structures. Compos. Struct. 2021, 267, 113849. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| K, C, M | Stiffness, damping, and mass matrices |
| D | Dynamic stiffness matrix |
| Angular frequency | |
| q | Vector of nodal degrees of freedom |
| f | Vector of internal forces |
| T | Transformation matrix |
| Propagation constant | |
| k | Wavenumber |
| Transfer matrix | |
| Modeshape vector | |
| Energy and power | |
| Group velocity and phase velocity | |
| Propagation direction |
| Young’s Modulus | Young’s Modulus | Shear Modulus | Shear Modulus | Fibre Volume Fraction | Poisson Ratio | Poisson Ratio | Density |
|---|---|---|---|---|---|---|---|
| 220 | 15 | 1500 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malik, M.K.; Chronopoulos, D.; Ciampa, F. Direct Calculation of the Group Velocity for Two-Dimensional Complex, Composite and Periodic Structures Using a Wave and Finite Element Scheme. Appl. Sci. 2021, 11, 4319. https://doi.org/10.3390/app11104319
Malik MK, Chronopoulos D, Ciampa F. Direct Calculation of the Group Velocity for Two-Dimensional Complex, Composite and Periodic Structures Using a Wave and Finite Element Scheme. Applied Sciences. 2021; 11(10):4319. https://doi.org/10.3390/app11104319
Chicago/Turabian StyleMalik, Muhammad Khalid, Dimitrios Chronopoulos, and Francesco Ciampa. 2021. "Direct Calculation of the Group Velocity for Two-Dimensional Complex, Composite and Periodic Structures Using a Wave and Finite Element Scheme" Applied Sciences 11, no. 10: 4319. https://doi.org/10.3390/app11104319