Behavior of Different Grafting Strategies Using Automated Technology for Splice Grafting Technique

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
3.1. Device Description
- (1)
- In the first phase, the device makes a grafting clip from a continuous roll of plastic tube tape through the coordinated and sequential action of several pneumatic actuators and a blade cutting system. To do this, the first microcylinder (SMC CJPB10-5) clamps the continuous tube tape against a second cylinder (SMC CXSM15-15), which vertically pushes through the exact length required for the grafting clip. Finally, the tube is cut by a blade attached to the second cylinder (SMC CXSM15-15), with a clean dry shock cut.
- (2)
- In the second phase, the grafting clip is clamped by a rotary actuator (Festo DM-6-90-P-A), which acts on a lever mechanism that presses the clip’s side wings, thus opening the clip to its maximum. As a last step, once the clip is on, a cylinder (SMC CXSM25-70) horizontally scrolls the clip to align with the union point of the two graft seedlings. Once the graft is complete, the rotary actuator (which holds the clip open) releases the clip and removes itself from the union point, returning to its resting position.
3.2. Definition of the Operating Conditions
3.3. Experiments
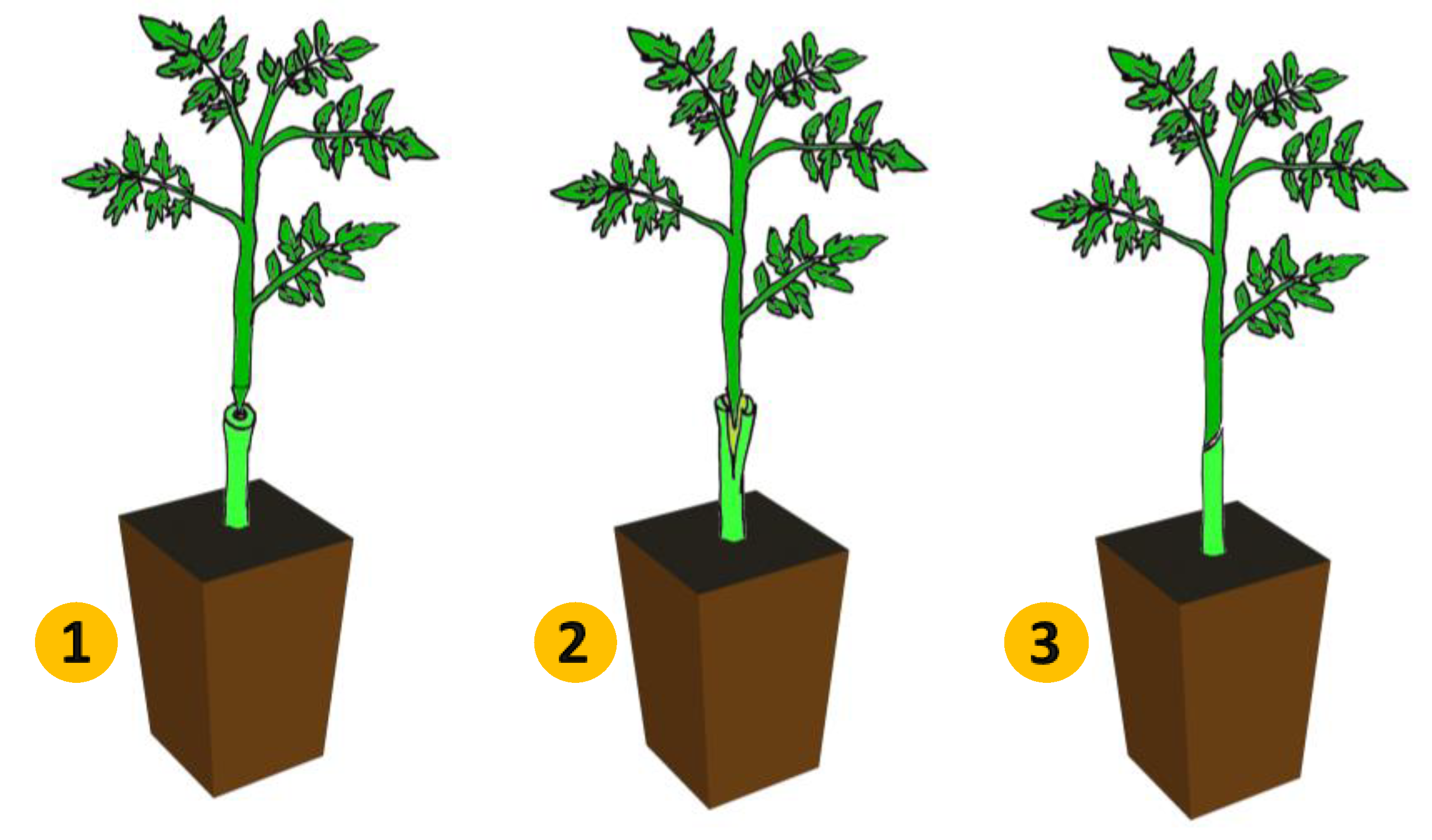
- One consisted of first placing the grafting clip at the attachment point, and then inserting the rootstock and the scion, with both seedlings being inserted at the same time but from different orientations (Clip and Stems, CS).
- The other consisted of first placing the seedlings into the passive fitting device and then approximating and positioning the grafting clip onto their attachment point (Stems and Clip, SC).
- (1)
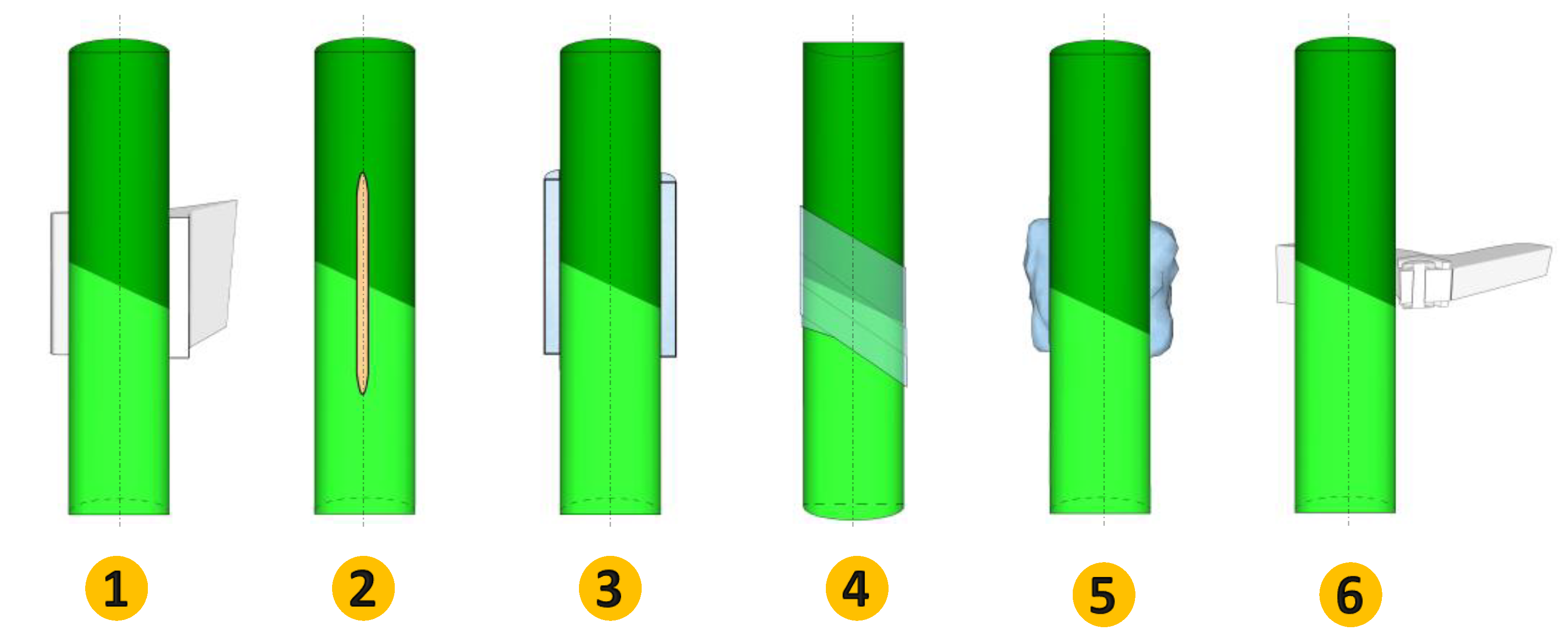
- In the first test option, the stems were attached so that the union line was facing the side opening (side, S).
- (2)
- In the second test option, the stem union was carried out in such a way that the rootstock was to the front, hiding the union surface behind it (front rootstock, FR).
- (3)
- In the third test option, the stem union was carried out with the scion graft facing forward, thus hiding the union surface behind the scion (front scion, FS).
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Velasco-alvarado, M.D.J.; Castro-brindis, R.; Avitia-garcía, E.; Castillo-gonzáles, A.M.; Sahagún, J. Proceso de Unión del Injerto de Empalme en Jitomate (Solanumly copersicum L.). RevistaMexicana deCienciasAgrícolas. 2017. Available online: http://www.redalyc.org/html/2631/263152411004/ (accessed on 19 February 2020).
- Tateishi, K. Grafting Watermelon onto Pumpkin. J. Jpn. Hortic. 1927, 39, 5–8. Available online: http://cals.arizona.edu/grafting/sites/cals.arizona.edu.grafting/files/TranslationofTateishi1927.pdf (accessed on 29 February 2020).
- Lee, J.-M.; Oda, M. Grafting of Herbaceous Vegetable and Ornamental Crops. Hortic. Rev. 2003, 28. [Google Scholar] [CrossRef]
- Kubota, C. History of Vegetable Grafting. 2016, pp. 1–5. Available online: http://www.vegetablegrafting.org/wp/wp-content/uploads/2018/04/History-VegetableGrafting3-1-18.pdf (accessed on 29 February 2020).
- Maurya, D.; Pandey, A.K.; Kumar, V.; Dubey, S.; Prakash, V. Grafting techniques in vegetable crops: A review. Int. J. Chem. Stud. 2019, 7, 1664–1672. [Google Scholar]
- Kubota, C.; McClure, M.A.; Kokalis-Burelle, N.; Bausher, M.G.; Rosskopf, E.N. Vegetable grafting: History, use, and current technology status in North America. Hortscience 2008, 43, 1664–1669. [Google Scholar] [CrossRef]
- Alvarez, C.; Herzog, D. La técnica del Injerto (Presentation by Rijk Zwaan Ibérica). Rijk Zwaan Ibérica. 2011. Available online: https://es.slideshare.net/directorarica/presentacin-injerto-semilleros (accessed on 19 February 2020).
- Bernal Alzate, J.; Rueda Puente, E.O.; Grimaldo Juárez, O.; González Mendoza, D.; Cervantes Díaz, L.; García López, A. Studies of Grafts in vegetables, an alternative for agricultural production under stress conditions: Physiological responses. J. Plant Sci. Phytopathol. 2018, 6–14. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.-M.; Kubota, C.; Tsao, S.J.; Bie, Z.; Echevarria, P.H.; Morra, L.; Oda, M. Current status of vegetable grafting: Diffusion, grafting techniques, automation. Sci. Hortic. 2010, 127, 93–105. [Google Scholar] [CrossRef]
- Fallik, E.; Ilic, Z. Grafted vegetables—The influence of rootstock and scion on postharvest quality. Folia Hortic. 2014, 2, 79–90. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Alfocea, F. Why should we investigate vegetable grafting? Acta Hortic. 2015, 1086, 21–29. [Google Scholar] [CrossRef]
- Chen, Y.C.; Chang, W.C.; Wang, S.T.; Lin, S.I. Development of a grafting method and healing conditions to improve cabbage head quality. HortTechnology 2019, 29, 57–64. [Google Scholar] [CrossRef] [Green Version]
- Rouphael, Y.; Schwarz, D.; Krumbein, A.; Colla, G. Impact of grafting on product quality of fruit vegetables. Sci. Hortic. 2010, 127, 172–179. [Google Scholar] [CrossRef]
- Chiu, Y.C.; Chen, S.J.; Wu, G.; Lin, Y. 3D Computer-aided human factor engineering analysis of a grafting robot. J. Agric. Saf. Health 2006. Available online: https://pdfs.semanticscholar.org/4e1a/9520e51e475fb067112841643d23689994a4.pdf (accessed on 19 February 2020).
- Lee, J.-M. Cultivation of grafted vegetables 1. Current status, grafting methods, and benefits. HortScience 1994, 29, 235–239. [Google Scholar] [CrossRef]
- Ashraf, M.A.; Kondo, N.; Shiigi, T. Use of Machine Vision to Sort Tomato Seedlings for Grafting Robot. Eng. Agric. Environ. Food 2011, 4, 119–125. [Google Scholar] [CrossRef]
- Enzo, M. Tomato Grafting. Young Plant Business Trends. Syngenta Solutions in Production Technology. 2015. Available online: https://www.syngenta.it/file/2141/download?token=7r50dcUd (accessed on 19 February 2020).
- Colla, G.; Rouphael, Y.; Cardarelli, M.; Salerno, A.; Rea, E. The effectiveness of grafting to improve alkalinity tolerance in watermelon. Environ. Exp. Bot. 2010, 68, 283–291. [Google Scholar] [CrossRef]
- Belmonte-uren, L.J.; Garrido-cardenas, J.A.; Camacho-ferre, F. Analysis of World Research on Grafting in Horticultural Plants. HortScience 2020, 55, 112–120. [Google Scholar] [CrossRef]
- Djidonou, D.; Gao, Z.; Zhao, X. Economic analysis of grafted tomato production in sandy soils in northern Florida. Horttechnology 2013, 23, 613–621. [Google Scholar] [CrossRef] [Green Version]
- De Miguel, A. II Jornadas Soobre Semillas y Semilleros Hortícolas. 1995. Available online: http://www.juntadeandalucia.es/export/drupaljda/1337170141II_Jornadas_sobre_Semillas_y_Semilleros_Horticolas__BAJA.pdf (accessed on 19 February 2020).
- Draie, R. Influence of grafting method in the quality of tomato seedlings grafted and intended for commercialization. IJSEAS 2017, 3, 2395–3470. [Google Scholar]
- Garrido, J.C.G. Técnicas de Cultivo y Comercialización de la Sandía. 2015. Available online: https://www.publicacionescajamar.es/series-tematicas/agricultura/tecnicas-de-cultivo-y-comercializacion-de-la-sandia (accessed on 19 February 2020).
- Singh, H.; Kumar, P.; Chaudhari, S.; Edelstein, M. Tomato Grafting: A Global Perspective. HortScience 2017, 52, 1328–1336. [Google Scholar] [CrossRef] [Green Version]
- Johnson, S.; Kreider, P.; Miles, C. Vegetable Grafting: Eggplants and Tomatoes. 2013. Available online: http://pubs.cahnrs.wsu.edu/publications/wp-content/uploads/sites/2/publications/fs052e.pdf (accessed on 19 February 2020).
- De Miguel Gómez, A. Serie Documentos: El Injerto de Plantas de Tomate. 2011. Available online: www.poscosecha.com/es/publicaciones/ (accessed on 19 February 2020).
- Hartmann, H.T.; Kester, D.E.; Davies, F.T.; Geneve, R.L. Principles of grafting and budding. In Plant Propagation. Principles and Practices, 8th ed.; Pearson: London, UK, 2010; Chapter 11; ISBN 978-0-13-501449-3. [Google Scholar]
- Guan, W.; Hallett, S. Vegetable Grafting. Techniques for Tomato Grafting. Horticulture and Landscape Architecture, (HO-260-W). 2016, pp. 1–8. Available online: https://extension.purdue.edu/extmedia/HO/HO-260-W.pdf (accessed on 19 February 2020).
- Oda, M. Grafting of Vegetables to Improve Greenhouse Production; Food and Fertilizer Technology Center: Taipei, Taiwan, 1999; 11p. [Google Scholar]
- Bausher, M.G. Road, South Rock, Pierce, Fort Graft Angle and Its Relationship to Tomato Plant Survival. Hort Sci. 2013, 48, 34–36. Available online: http://hortsci.ashspublications.org/content/48/1/34.short (accessed on 19 February 2020). [CrossRef] [Green Version]
- Erin, R.; Cristina, P.; Francesco, D.G. Crop Specific Grafting Methods, Rootstocks and Scheduling: Tomato. USDA-ARS, Fort Pierce, Florida. 2017, pp. 1–13. Available online: http://www.vegetablegrafting.org/resources/grafting-manual/ (accessed on 19 February 2020).
- Villasana Rojas, J.A. Tesis: Efecto del Injerto en la Producción de Tomate (Lycopersicon esculentum Mill.) Bajo Condiciones de Invernadero en Nuevo León; Universidad Autónoma de Nuevo León: San Nicolás de los Garza, Mexico, 2010; Available online: http://eprints.uanl.mx/5613/1/1080194762%20%281%29.PDF (accessed on 15 April 2020).
- Holt, J. A simple way of grafting herbaceous plants. Gdnr’s Chron 1958, 143, 332. Available online: https://eurekamag.com/research/013/940/013940812.php (accessed on 19 February 2020).
- Ito, T. Present state of transplant production practices in Japanese horticultural industry. In Proceedings of the International Symposiumon Transplant Production Systems, Transplantant Production Systems, Yokohama, Japan, 21–26 July 1992; Kurata, K., Kozai, T., Eds.; Kluwer Academic Publishers: Amsterdam, The Netherlands, 1992. [Google Scholar] [CrossRef]
- Oda, M. Use of Grafted Seedlings for Vegetable Production in Japan. Acta Hortic. 2008, 770, 15–20. Available online: https://www.actahort.org/books/770/770_1.htm (accessed on 19 February 2020). [CrossRef]
- Itagi, T. Studies on the production system of the grafted nurseries in fruit vegetables (Part 1). J. Jpn. Soc. Hortic. Sci. 1990, 59, 294–295. [Google Scholar]
- Kurata, K. Cultivation of grafted Vegetables 2. Development of Grafting Robots in Japan. HortScience 1994, 29, 240–244. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, M.; Sasaya, S.; Kobayashi, K. Present Status of Vegetable Grafting Systems. JIRCAS—Japan International Research Center for Agricultural Sciences. 1998. Available online: https://www.jircas.affrc.go.jp/english/publication/jarq/32-2/32-2-105-112.pdf (accessed on 19 February 2020).
- Zhao, X.; Kubota, C. Vegetable Grafting International Field Trip Report—Part I: Taiwan and Japan. 2015, pp. 1–17. Available online: http://www.vegetablegrafting.org/wp/wp-content/uploads/2013/12/Vegetable-Grafting-International-Field-Trip-Report-2015-Taiwan-and-Japan.pdf (accessed on 19 February 2020).
- Chen, S.; Chiu, Y.C.; Chang, Y.C. Development of a tubing grafting robotic system for fruit bearing vegetable seedlings. Am. Soc. Agric. Biol. Eng. 2010, 26, 707–714. Available online: http://bmte.niu.edu.tw/files/writing_journal/5/83_cc69a06e.pdf (accessed on 19 February 2020).
- Leonardi, C.; Romano, D. Recent issues on vegetable grafting. Acta Hortic. 2004, 631, 163–174. Available online: http://www.actahort.org/books/631/631_21.htm (accessed on 19 February 2020). [CrossRef]
- Bumgarner, N.R.; Kleinhenz, M.D. Grafting Guide: A Pictorial Guide to the Cleft and Splice Graft Methods as Applied to Tomato and Pepper. Ohio State University. Research and Development Center. 2014. Available online: http://web.extension.illinois.edu/smallfarm/downloads/50570.pdf (accessed on 19 February 2020).
- Boutelou y Agraz, C. Tratado del injerto. Servicio de Publicaciones y Divulgación. Junta de Andalucía. Consejería de Agricultura y Pesca. Reedition 2007. 1817. Available online: http://www.biodiversitylibrary.org/item/145799 (accessed on 19 February 2020).
- Kim, S.H.; Pham, T.D.; Kim, I.S. Effect of Grafting Position, Water Content in Substrate on the Survival Rate and Quality of Grafted Tomato Seedlings. J. Agric. Life Environ. Sci. 2016, 27, 13. [Google Scholar]
- Pardo-Alonso, J.-L.; Carreño-Ortega, Á.; Martínez-Gaitán, C.-C.; Callejón-Ferre, Á.-J. Combined Influence of Cutting Angle and Diameter Differences between Seedlings on the Grafting Success of Tomato Using the Splicing Technique. Agronomy 2018, 9, 5. [Google Scholar] [CrossRef] [Green Version]
- Yamada, H. Research for Development of the Grafting Robot for Solanaceae. J. Jpn. Soc. Agric. Mach. 2003, 65, 142–149. Available online: https://www.jstage.jst.go.jp/article/jsam1937/65/5/65_5_142/_pdf/-char/ja (accessed on 19 February 2020).
- Pardo-Alonso, J.L.; Carreño-Ortega, Á.; Martínez-Gaitán, C.C.; Golasi, I.; Galán, M.G. Conventional industrial robotics applied to the process of tomato grafting using the splicing technique. Agronomy 2019, 9, 880. [Google Scholar] [CrossRef] [Green Version]
- Johnson, S.J.; Miles, C.A. Effect of healing chamber design on the survival of grafted eggplant, tomato, and watermelon. HortTechnology 2011, 21, 752–758. [Google Scholar] [CrossRef] [Green Version]
- Torres, A.P.; López, G.R. Medición de Luz Diaria Integrada en Invernaderos. Produccion Comercial de Cultivos Bajo Invernadero Y Viveros, (HO-238-SW). 2002, pp. 1–7. Available online: https://www.extension.purdue.edu/extmedia/HO/HO-238-SW.pdf (accessed on 19 February 2020).
- Chiu, Y.C.; Chen, S.; Wu, G.J.; Lin, Y.H. Three-Dimensional Computer-Aided Human Factors Engineering Analysis of a Grafting Robot. J. Agric. Saf. Health 2012, 18, 181–194. [Google Scholar] [CrossRef] [PubMed]
- Lin, H.-S.; Chang, C.-Y.; Chien, C.-S.; Chen, S.-F.; Chen, W.-L.; Chu, Y.-C.; Chang, S.-C. Current Situation of Grafted Vegetable Seedling Industry and Its Mechanization Development in Taiwan. 2016, pp. 65–76. Available online: http://www.fftc.agnet.org/activities.php?func=view&id=20160113155600 (accessed on 1 April 2020).
- Masterson, S.A. Propagation and Utilization of Grafted Tomatoes in the Great Plains. Ph.D. Thesis, University of Alabama, Tuscaloosa, AL, USA, 2010. Available online: https://core.ac.uk/download/pdf/18529369.pdf (accessed on 15 April 2020).
- Bausher, M.G.; Road, S.R.; Pierce, F. Graft Angle and Its Relationship to Tomato Plant Survival. HortScience 2013, 48, 34–36. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Placement Order | N | Grafts | Mean (Success) | Variance | St. Error | 95% CI | Grouping (Tukey’s HDS) |
|---|---|---|---|---|---|---|---|
| Seedlings–Clips (SC) | 18 | 450 | 91.11% | 0.00083 | 0.0733 | (0.8717; 0.9505) | a |
| Clip–Seedlings (CS) | 18 | 450 | 71.33% | 0.02542 | 0.0902 | (0.6740; 0.7527) | b |
| Orientation | N | Grafts | Mean (Success) | Variance | St. Error | 95% CI | Grouping (Tukey’s HDS) |
|---|---|---|---|---|---|---|---|
| Side (S) | 12 | 300 | 89.67% | 0.00135 | 0.1150 | (0.8278; 0.9655) | a |
| Front R (FR) | 12 | 300 | 77.33% | 0.00267 | 0.1198 | (0.7045; 0.8422) | b |
| Front S (FS) | 12 | 300 | 76.67% | 0.00075 | 0.1167 | (0.6978; 0.8355) | b |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pardo-Alonso, J.-L.; Carreño-Ortega, Á.; Martínez-Gaitán, C.-C.; Fatnassi, H. Behavior of Different Grafting Strategies Using Automated Technology for Splice Grafting Technique. Appl. Sci. 2020, 10, 2745. https://doi.org/10.3390/app10082745
Pardo-Alonso J-L, Carreño-Ortega Á, Martínez-Gaitán C-C, Fatnassi H. Behavior of Different Grafting Strategies Using Automated Technology for Splice Grafting Technique. Applied Sciences. 2020; 10(8):2745. https://doi.org/10.3390/app10082745
Chicago/Turabian StylePardo-Alonso, José-Luis, Ángel Carreño-Ortega, Carolina-Clara Martínez-Gaitán, and Hicham Fatnassi. 2020. "Behavior of Different Grafting Strategies Using Automated Technology for Splice Grafting Technique" Applied Sciences 10, no. 8: 2745. https://doi.org/10.3390/app10082745