Impact of Horse Hoof Wall with Different Solid Surfaces


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
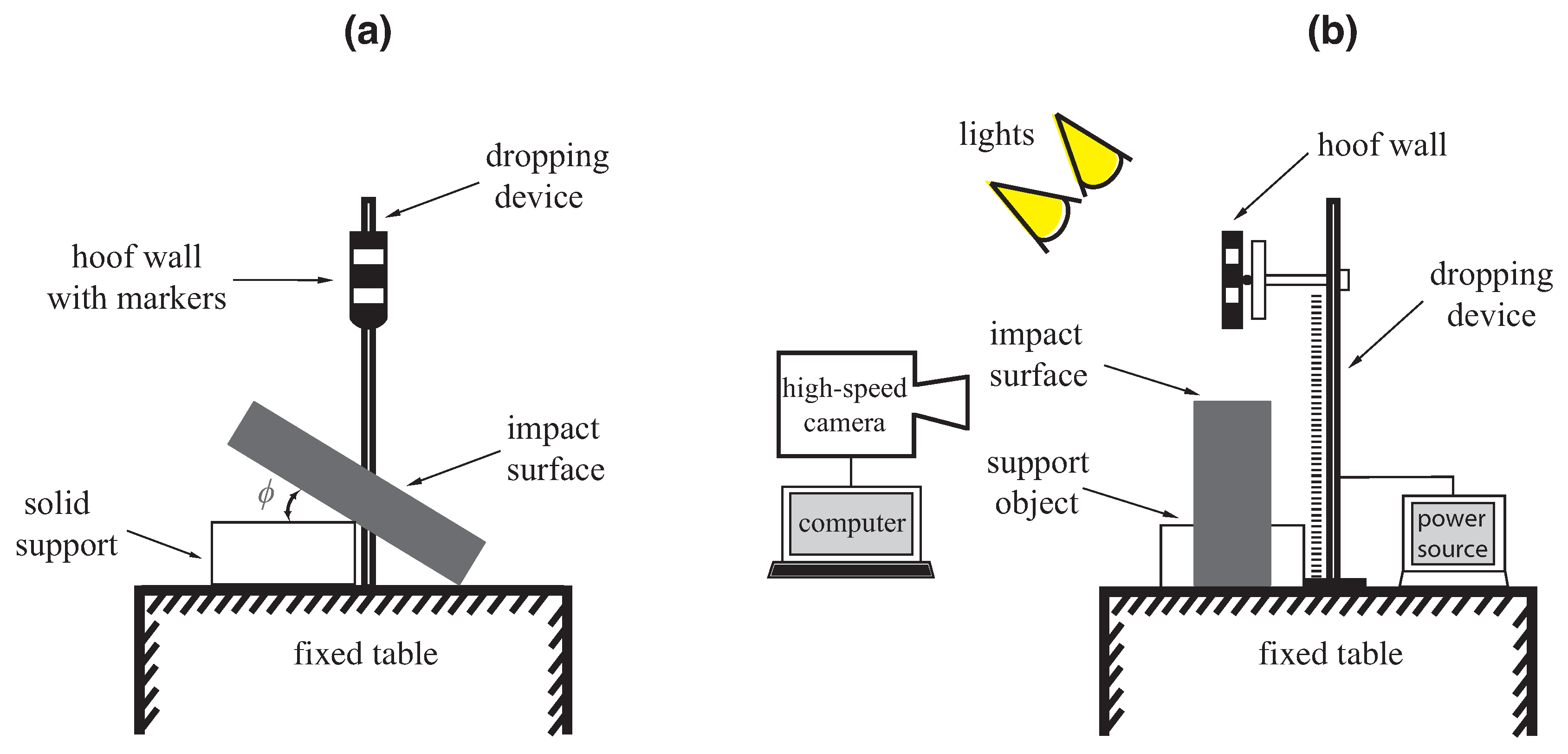
2.1. Experiments
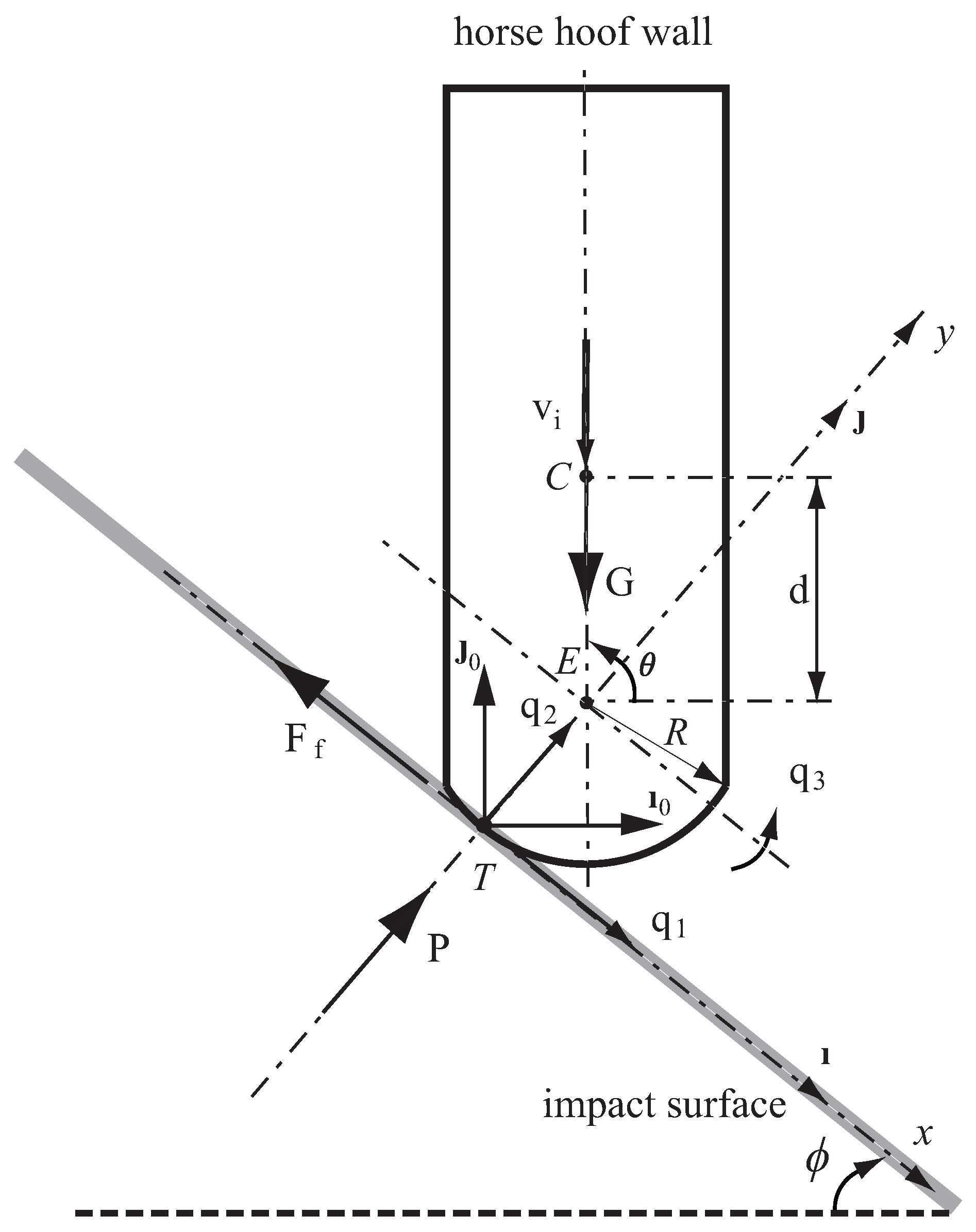
2.2. Mathematical Modeling
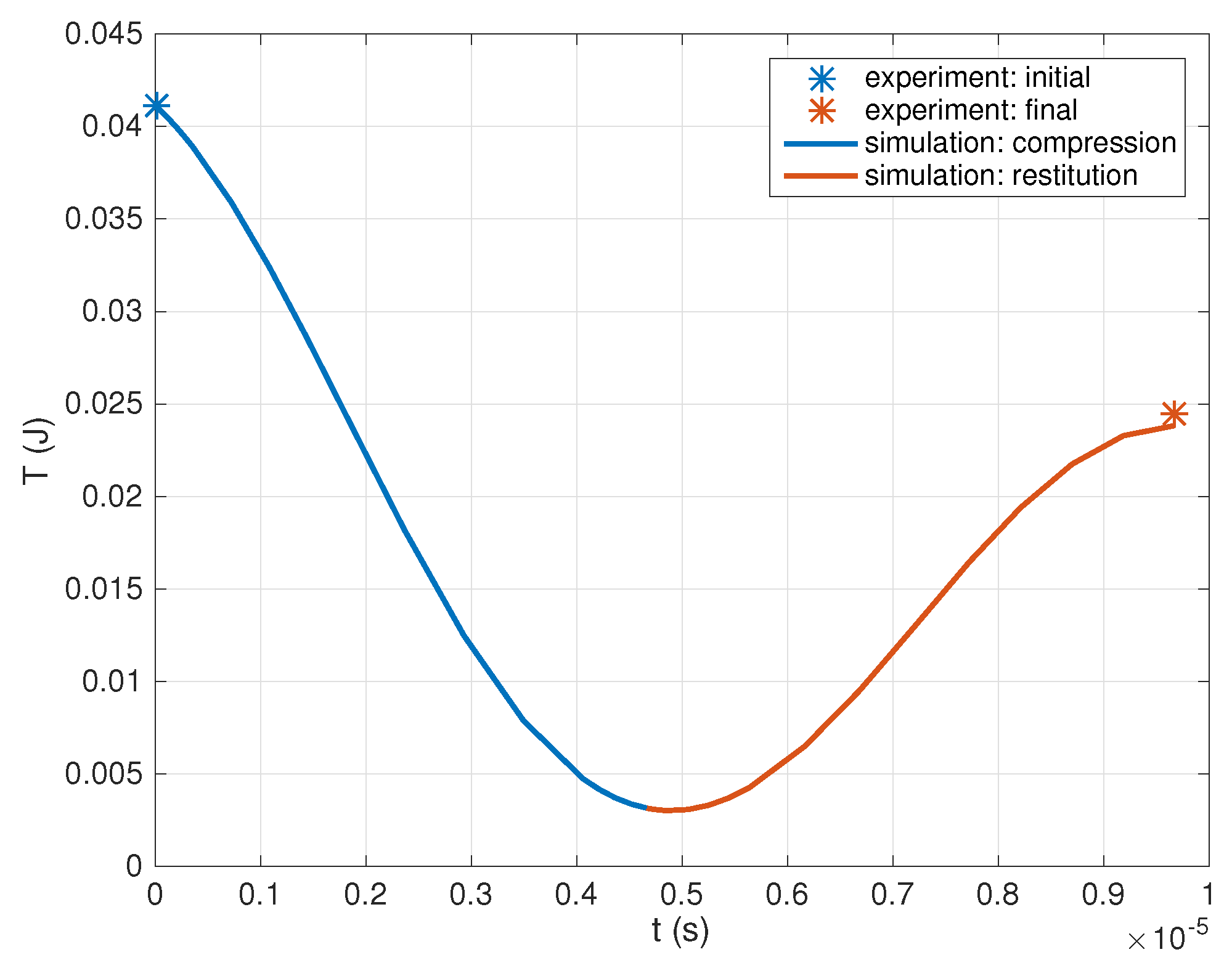
2.2.1. Compression Phase
2.2.2. Restitution Phase
2.3. Statistical Analysis
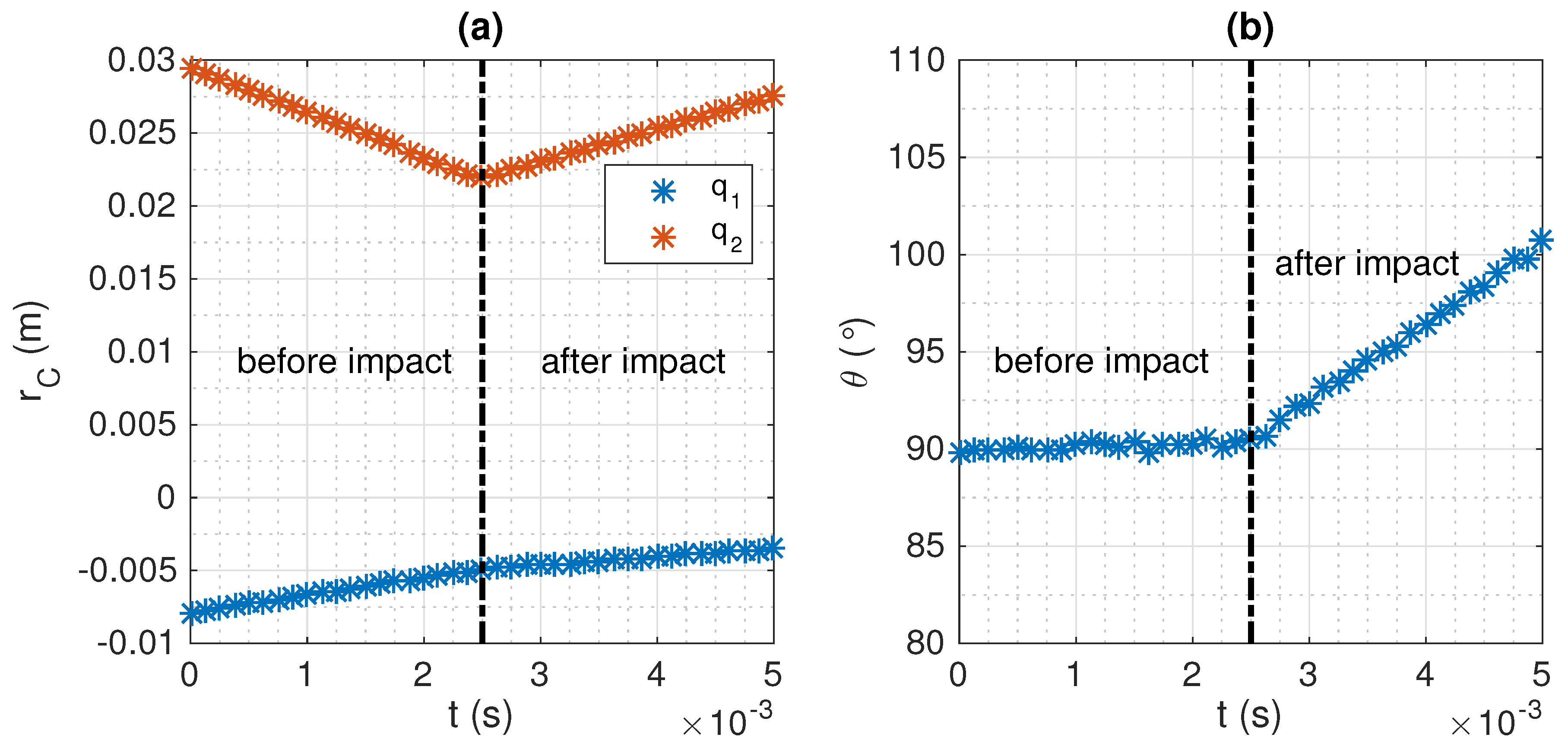
3. Results
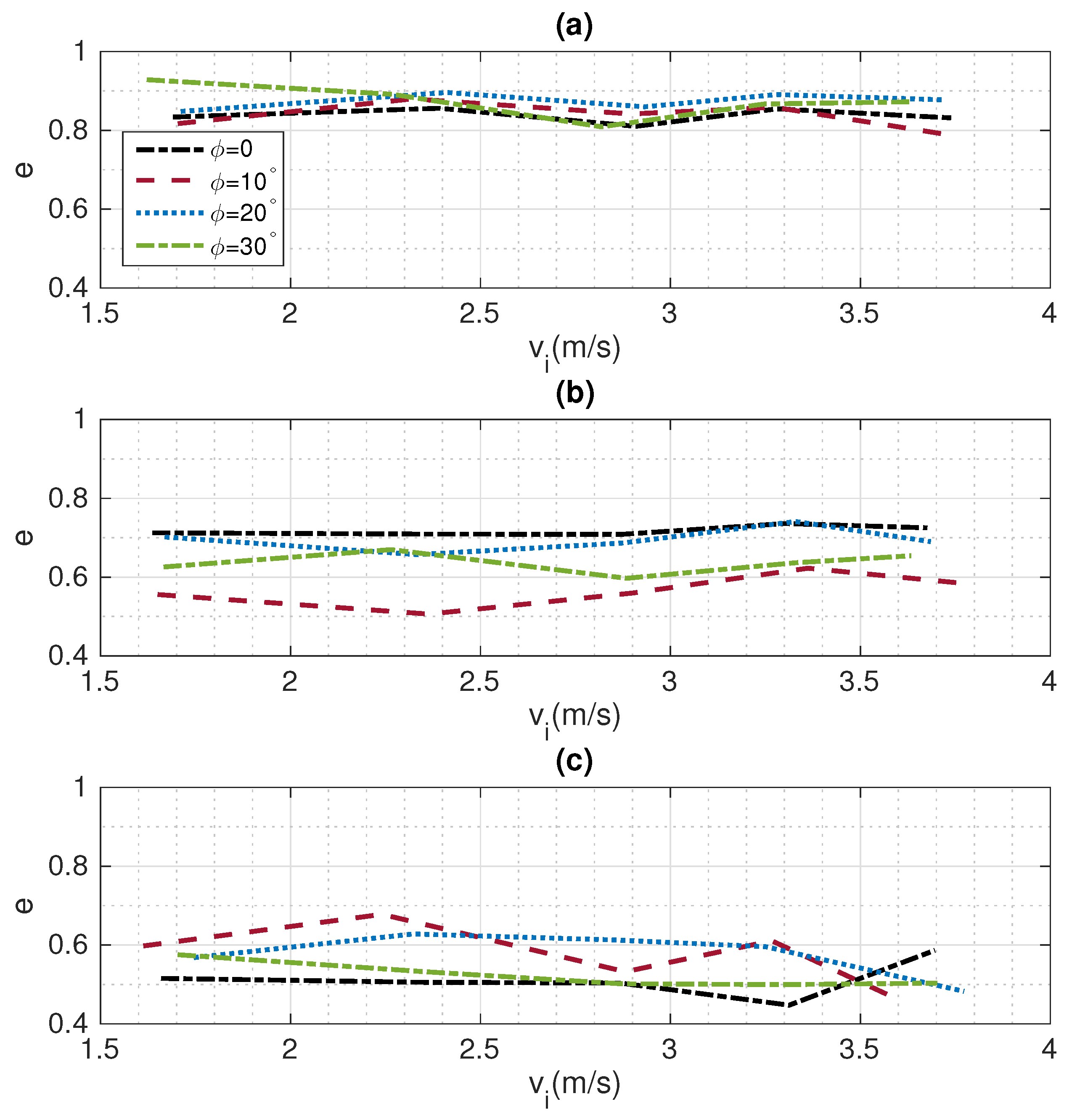
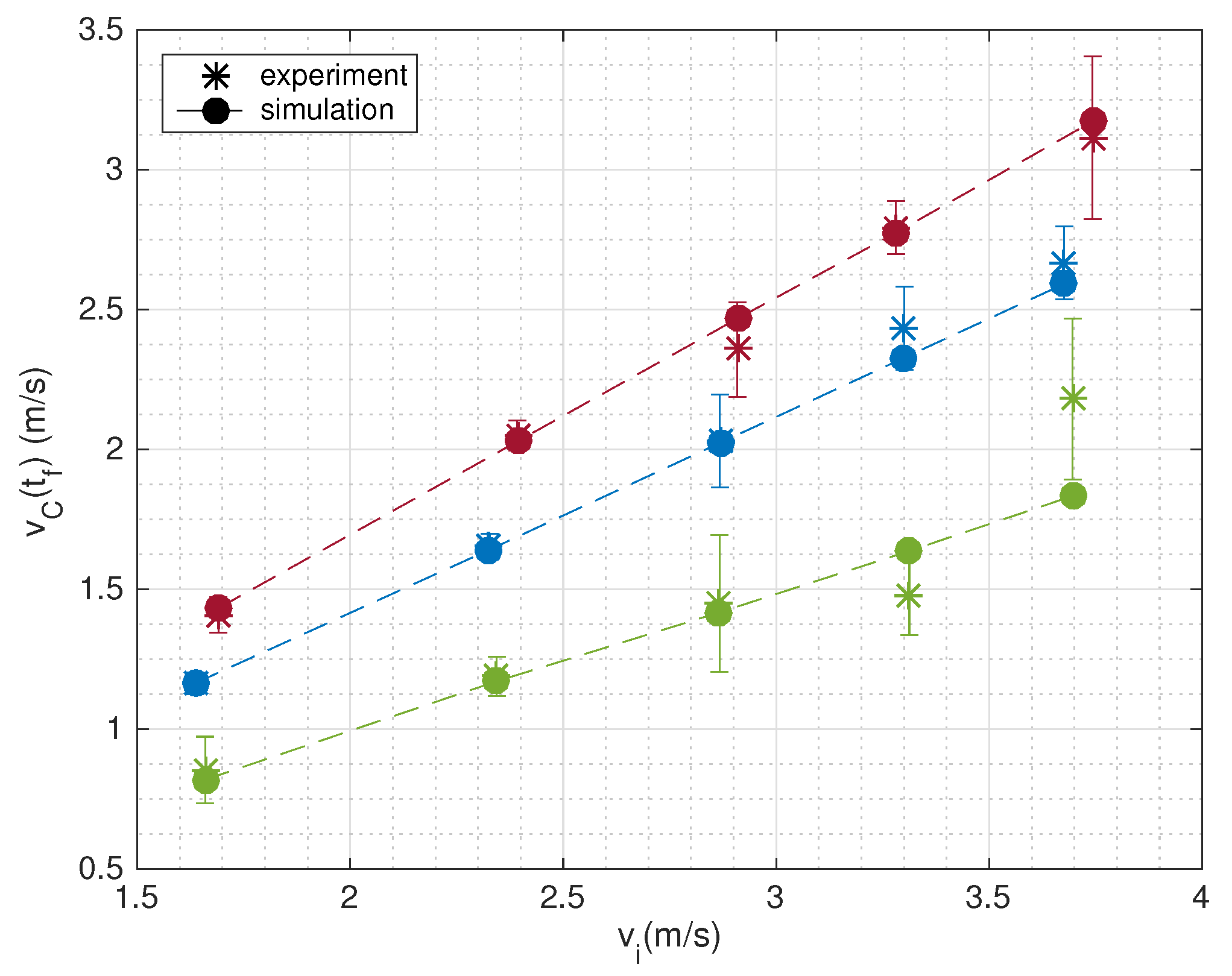
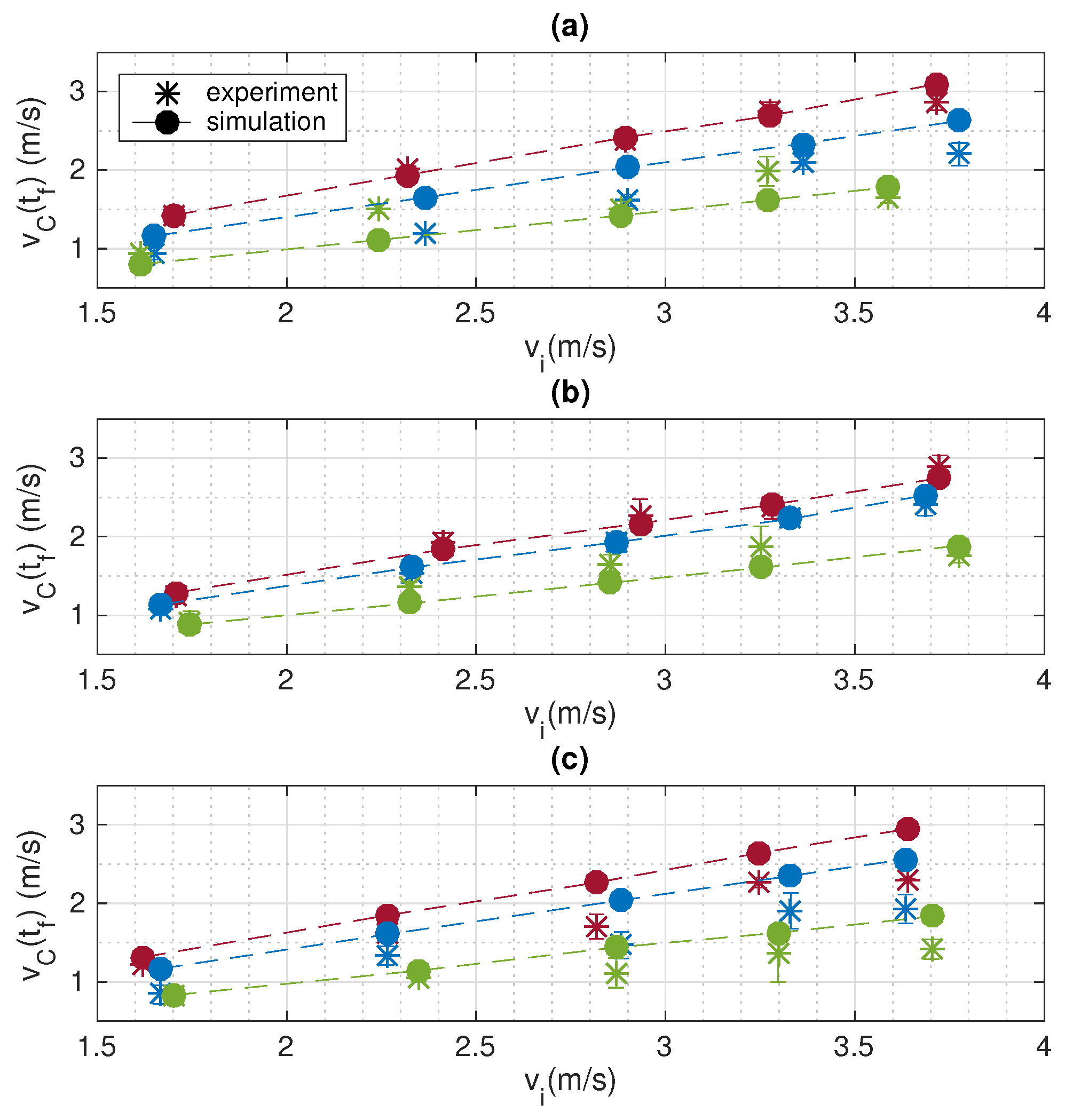
3.1. Coefficient of Restitution
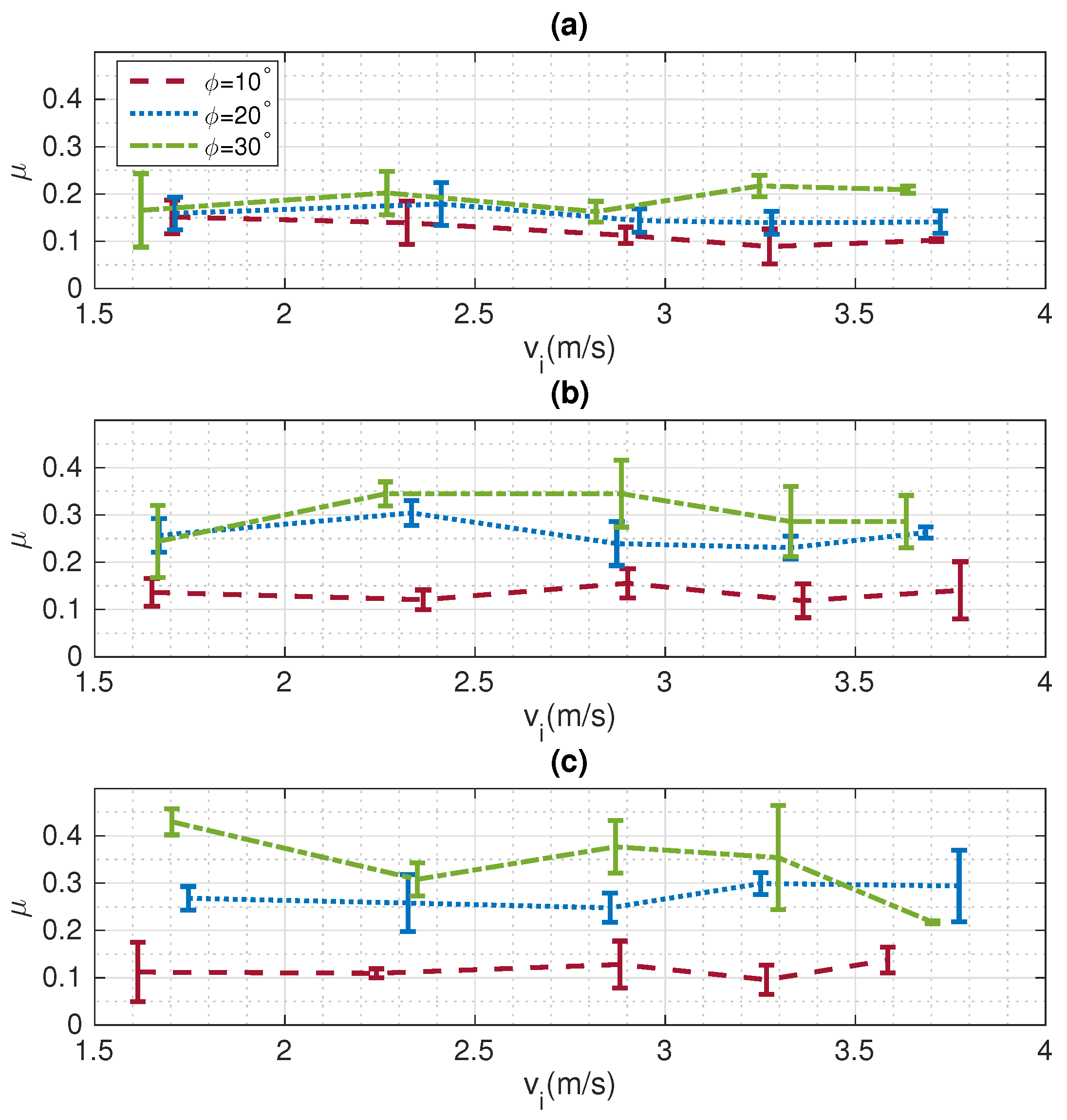
3.2. Effective Coefficient of Friction
3.3. Normal Impacts and Contact Force Coefficients
3.4. Oblique Impacts
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Parkes, R.; Witte, T. The foot–surface interaction and its impact on musculoskeletal adaptation and injury risk in the horse. Equine Vet. J. 2015, 47, 519–525. [Google Scholar] [CrossRef] [PubMed]
- McCarty, C.; Thomason, J.; Gordon, K.; Burkhart, T.; Bignell, W. Effect of hoof orientation and ballast on acceleration and vibration in the hoof and distal forelimb following simulated impacts ex vivo. Equine Vet. J. 2015, 47, 223–229. [Google Scholar] [CrossRef] [PubMed]
- Back, W.; van Schie, M.H.; Pol, J.N. Synthetic shoes attenuate hoof impact in the trotting warmblood horse. Equine Comp. Exerc. Physiol. 2006, 3, 143–151. [Google Scholar] [CrossRef] [Green Version]
- Leach, D.; Zoerb, G. Mechanical properties of equine hoof wall tissue. Am. J. Vet. Res. 1983, 44, 2190–2194. [Google Scholar] [PubMed]
- Behnke, R. Numerical time-domain modelling of hoof–ground interaction during the stance phase. Equine Vet. J. 2018, 50, 519–524. [Google Scholar] [CrossRef] [PubMed]
- Ramsey, G.D.; Hunter, P.J.; Nash, M.P. The influence of loading conditions on equine hoof capsule deflections and stored energy assessed by finite element analysis. Biosyst. Eng. 2013, 115, 283–290. [Google Scholar] [CrossRef]
- Thomason, J.J.; Peterson, M.L. Biomechanical and mechanical investigations of the hoof-track interface in racing horses. Vet. Clin. N. Am. Equine Pract. 2008, 24, 53–77. [Google Scholar] [CrossRef]
- Kasapi, M.A.; Gosline, J.M. Design complexity and fracture control in the equine hoof wall. J. Exp. Biol. 1997, 200, 1639–1659. [Google Scholar]
- Thomason, J.; Biewener, A.; Bertram, J. Surface strain on the equine hoof wall in vivo: Implications for the material design and functional morphology of the wall. J. Exp. Biol. 1992, 166, 145–168. [Google Scholar]
- Thomason, J. Variation in surface strain on the equine hoof wall at the midstep with shoeing, gait, substrate, direction of travel, and hoof shape. Equine Vet. J. 1998, 30, 86–95. [Google Scholar] [CrossRef]
- Douglas, J.; Mittal, C.; Thomason, J.; Jofriet, J. The modulus of elasticity of equine hoof wall: Implications for the mechanical function of the hoof. J. Exp. Biol. 1996, 199, 1829–1836. [Google Scholar]
- Kasapi, M.A.; Gosline, J.M. Strain-rate-dependent mechanical properties of the equine hoof wall. J. Exp. Biol. 1996, 199, 1133–1146. [Google Scholar]
- Bertram, J.; Gosline, J. Fracture toughness design in horse hoof keratin. J. Exp. Biol. 1986, 125, 29–47. [Google Scholar]
- Bertram, J.; Gosline, J. Functional design of horse hoof keratin: The modulation of mechanical properties through hydration effects. J. Exp. Biol. 1987, 130, 121–136. [Google Scholar]
- Ramsey, G.D.; Hunter, P.J.; Nash, M.P. The influence of tissue hydration on equine hoof capsule deformation and energy storage assessed using finite element methods. Biosyst. Eng. 2012, 111, 175–185. [Google Scholar] [CrossRef]
- Jansová, M.; Ondoková, L.; Vychytil, J.; Kochová, P.; Witter, K.; Tonar, Z. A finite element model of an equine hoof. J. Equine Vet. Sci. 2015, 35, 60–69. [Google Scholar] [CrossRef]
- Gustås, P.; Johnston, C.; Drevemo, S. Ground reaction force and hoof deceleration patterns on two different surfaces at the trot. Comp. Exerc. Physiol. 2006, 3, 209. [Google Scholar] [CrossRef]
- Setterbo, J.J.; Garcia, T.C.; Campbell, I.P.; Reese, J.L.; Morgan, J.M.; Kim, S.Y.; Hubbard, M.; Stover, S.M. Hoof accelerations and ground reaction forces of Thoroughbred racehorses measured on dirt, synthetic, and turf track surfaces. Am. J. Vet. Res. 2009, 70, 1220–1229. [Google Scholar] [CrossRef] [PubMed]
- Burn, J. Time domain characteristics of hoof-ground interaction at the onset of stance phase. Equine Vet. J. 2006, 38, 657–663. [Google Scholar] [CrossRef]
- Symons, J.; Garcia, T.; Stover, S.M. Distal hindlimb kinematics of galloping T horoughbred racehorses on dirt and synthetic racetrack surfaces. Equine Vet. J. 2014, 46, 227–232. [Google Scholar] [CrossRef]
- McClinchey, H.; Thomason, J.; Runciman, R. Grip and slippage of the horse’s hoof on solid substrates measured ex vivo. Biosyst. Eng. 2004, 89, 485–494. [Google Scholar] [CrossRef]
- Vos, N.J.; Riemersma, D.J. Determination of coefficient of friction between the equine foot and different ground surfaces: An in vitro study. Comp. Exerc. Physiol. 2006, 3, 191. [Google Scholar] [CrossRef] [Green Version]
- Clanton, C.; Kobluk, C.; Robinson, R.; Gordon, B. Monitoring surface conditions of a Thoroughbred racetrack. J. Am. Vet. Med. Assoc. 1991, 198, 613. [Google Scholar] [PubMed]
- Pardoe, C.; McGuigan, M.; Rogers, K.; Rowe, L.; Wilson, A. The effect of shoe material on the kinetics and kinematics of foot slip at impact on concrete. Equine Vet. J. 2001, 33, 70–73. [Google Scholar] [CrossRef]
- Panagiotopoulou, O.; Rankin, J.W.; Gatesy, S.M.; Hutchinson, J.R. A preliminary case study of the effect of shoe-wearing on the biomechanics of a horse’s foot. PeerJ 2016, 4, e2164. [Google Scholar] [CrossRef] [Green Version]
- Goldsmith, W. Impact; Dover Publications: Mineola, NY, USA, 2001. [Google Scholar]
- Derrick, T.R.; Caldwell, G.E.; Hamill, J. Modeling the stiffness characteristics of the human body while running with various stride lengths. J. Appl. Biomech. 2000, 16, 36–51. [Google Scholar] [CrossRef]
- Verheul, J.; Nedergaard, N.J.; Pogson, M.; Lisboa, P.; Gregson, W.; Vanrenterghem, J.; Robinson, M.A. Biomechanical loading during running: Can a two mass-spring-damper model be used to evaluate ground reaction forces for high-intensity tasks? Sports Biomech. 2019, 1–12. [Google Scholar] [CrossRef]
- Hunt, K.H.; Crossley, F.R.E. Coefficient of Restitution Interpreted as Damping in Vibroimpact. J. Appl. Biomech. 1975, 42, 440–445. [Google Scholar] [CrossRef]
- Marhefka, D.W.; Orin, D.E. Simulation of contact using a nonlinear damping model. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; Volume 2, pp. 1662–1668. [Google Scholar]
- Liu, W.; Nigg, B.M. A mechanical model to determine the influence of masses and mass distribution on the impact force during running. J. Biomech. 2000, 33, 219–224. [Google Scholar] [CrossRef]
- Ly, Q.H.; Alaoui, A.; Erlicher, S.; Baly, L. Towards a footwear design tool: Influence of shoe midsole properties and ground stiffness on the impact force during running. J. Biomech. 2010, 43, 310–317. [Google Scholar] [CrossRef] [Green Version]
- Van Den Bogert, A.; Schamhardt, H.; Crowe, A. Simulation of quadrupedal locomotion using a rigid body model. J. Biomech. 1989, 22, 33–41. [Google Scholar] [CrossRef]
- Reiser, R.F., II; Peterson, M.; McIlwraith, C.W.; Woodward, B. Simulated effects of racetrack material properties on the vertical loading of the equine forelimb. Sports Eng. 2000, 3, 1–11. [Google Scholar] [CrossRef]
- Swanstrom, M.D.; Zarucco, L.; Hubbard, M.; Stover, S.M.; Hawkins, D.A. Musculoskeletal Modeling and Dynamic Simulation of the Thoroughbred Equine Forelimb During Stance Phase of the Gallop. J. Biomech. Eng. 2004, 127, 318–328. [Google Scholar] [CrossRef] [PubMed]
- Burn, J.F.; Usmar, S.J. Hoof landing velocity is related to track surface properties in trotting horses. Comp. Exerc. Physiol. 2005, 2, 37. [Google Scholar] [CrossRef] [Green Version]
- Chateau, H.; Holden, L.; Robin, D.; Falala, S.; Pourcelot, P.; Estoup, P.; Denoix, J.M.; Crevier-denoix, N. Biomechanical analysis of hoof landing and stride parameters in harness trotter horses running on different tracks of a sand beach (from wet to dry) and on an asphalt road. Equine Vet. J. 2010, 42, 488–495. [Google Scholar] [CrossRef]
- Ghaednia, H.; Marghitu, D.B.; Jackson, R.L. Predicting the permanent deformation after the impact of a rod with a flat surface. J. Tribol. 2015, 137, 011403. [Google Scholar] [CrossRef]
- Marghitu, D.B.; Cojocaru, D.; Jackson, R.L. Elasto-plastic impact of a rotating link with a massive surface. Int. J. Mech. Sci. 2011, 53, 309–315. [Google Scholar] [CrossRef]
- Jackson, R.; Chusoipin, I.; Green, I. A Finite Element Study of the Residual Stress and Deformation in Hemispherical Contacts. J. Tribol. 2005, 127, 484–493. [Google Scholar] [CrossRef] [Green Version]
- Kogut, L.; Komvopoulos, K. Analysis of the spherical indentation cycle for elastic-perfectly plastic solids. J. Mater. Res. 2004, 19, 3641–3653. [Google Scholar] [CrossRef]
- Kogut, L.; Etsion, I. Elastic-plastic contact analysis of a sphere and a rigid flat. J. Appl. Mech. 2002, 69, 657–662. [Google Scholar] [CrossRef] [Green Version]
- Stoianovici, D.; Hurmuzlu, Y. A Critical Study of the Applicability of Rigid-Body Collision Theory. J. Appl. Mech. 1996, 63, 307–316. [Google Scholar] [CrossRef] [Green Version]
- Cojocaru, D.; Marghitu, D.B. Impact Behavior of a Rotating Rigid Body with Impact and Viscous Friction. Math. Probl. Eng. 2020, 2020, 5471629. [Google Scholar] [CrossRef]
- Khulief, Y.; Shabana, A. A continuous force model for the impact analysis of flexible multibody systems. Mech. Mach. Theory 1987, 22, 213–224. [Google Scholar] [CrossRef]
- Oosterlinck, M.; Royaux, E.; Back, W.; Pille, F. A preliminary study on pressure-plate evaluation of forelimb toe–heel and mediolateral hoof balance on a hard vs. a soft surface in sound ponies at the walk and trot. Equine Vet. J. 2014, 46, 751–755. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Marghitu, D.B.; Schumacher, J.; Wang, W. Impact of Horse Hoof Wall with Different Solid Surfaces. Appl. Sci. 2020, 10, 8743. https://doi.org/10.3390/app10238743
Zhao J, Marghitu DB, Schumacher J, Wang W. Impact of Horse Hoof Wall with Different Solid Surfaces. Applied Sciences. 2020; 10(23):8743. https://doi.org/10.3390/app10238743
Chicago/Turabian StyleZhao, Jing, Dan B. Marghitu, John Schumacher, and Wenzhong Wang. 2020. "Impact of Horse Hoof Wall with Different Solid Surfaces" Applied Sciences 10, no. 23: 8743. https://doi.org/10.3390/app10238743