Slug Regime Transitions in a Two-Phase Flow in Horizontal Round Pipe. CFD Simulations



Abstract
:1. Introduction
1.1. Two-Phase Gas–Liquid Flow in Horizontal Round Pipe Section
- Stratified flow: In this mode, the phases are separated along the channel height. Layered flow is observed at low velocities of gas and liquid.
- Wavy flow: As the velocity of the gas phase of the flow increases, waves are formed at the gas–liquid interface. Waves propagate in the direction of the flow.
- Bubbly flow: The gas phase is distributed in the form of individual bubbles in a liquid medium. Most often, bubbles are mixed with liquid at the top of the pipe.
- Plug flow: This flow is an intermittent flow, observed at low flow rates of gas and liquid. The mode is characterized by elongated gas bubbles (plugs).
- Slug flow: This flow is an intermittent flow. The flow is characterized by chaotic formation and movement of gas bubbles and a less distinct gas–liquid interface. Plug and slug flow patterns are often classified as intermittent flow.
- Churn flow: Occurs when the flow rate increases. The bubble shells break, and an emulsion appears. The flow regime is transitional between the slug and annular.
- Annular flow: Higher gas velocities create liquid films on the channel walls.
1.2. Experimental Investigation of Slug Regime of Gas–Liquid Flow in Horizontal Round Pipe Section
- Interfacial wave-induced instability development in the Taylor bubble, leading to its disintegration.
- Intense bubble shearing at the tail of the bubble.
1.3. The Objectives of the Study
- Reproduce the slug flow regime of a two-phase flow in a horizontal circular smooth pipeline using the CFD simulation method.
- Determine the location of the slug.
- Propose a technical solution that can be integrated into the pipeline to ensure a change in the flow regime.
2. Materials and Methods
2.1. Description of the Design Model
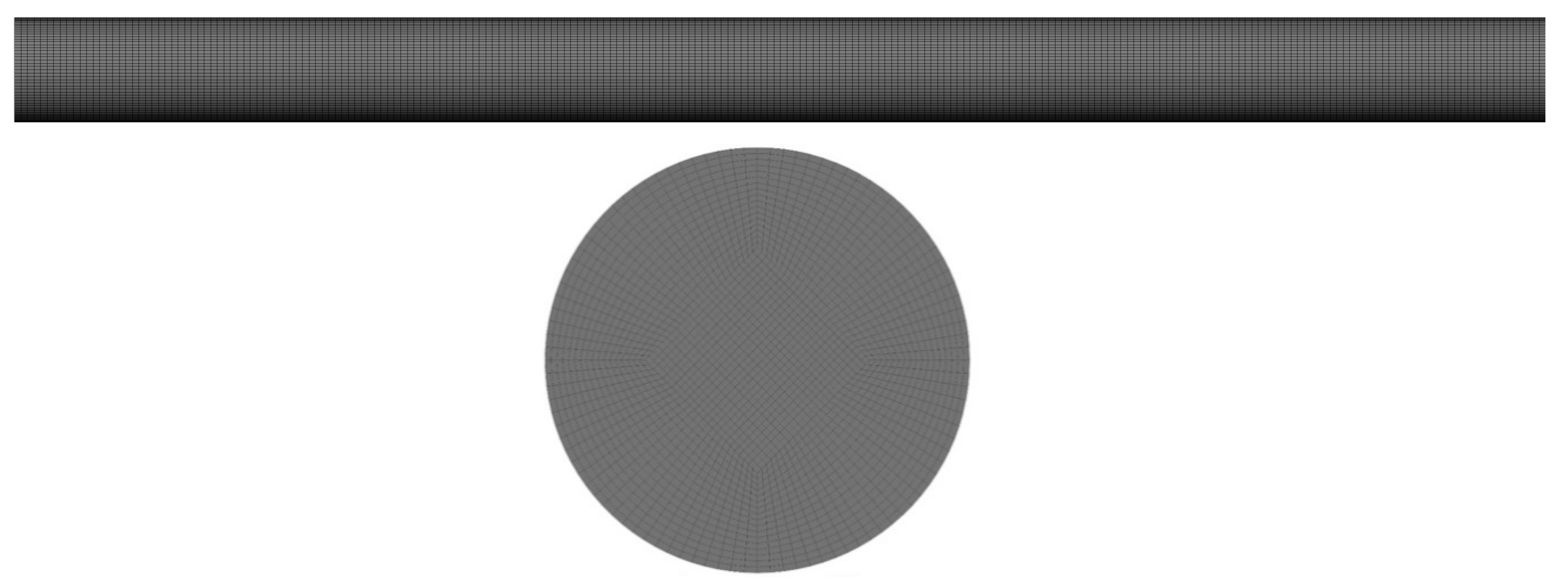
2.1.1. Geometry and Mesh Partition
- In the first version of the geometry, there were no local modifications inside in the pipe (Figure 2).
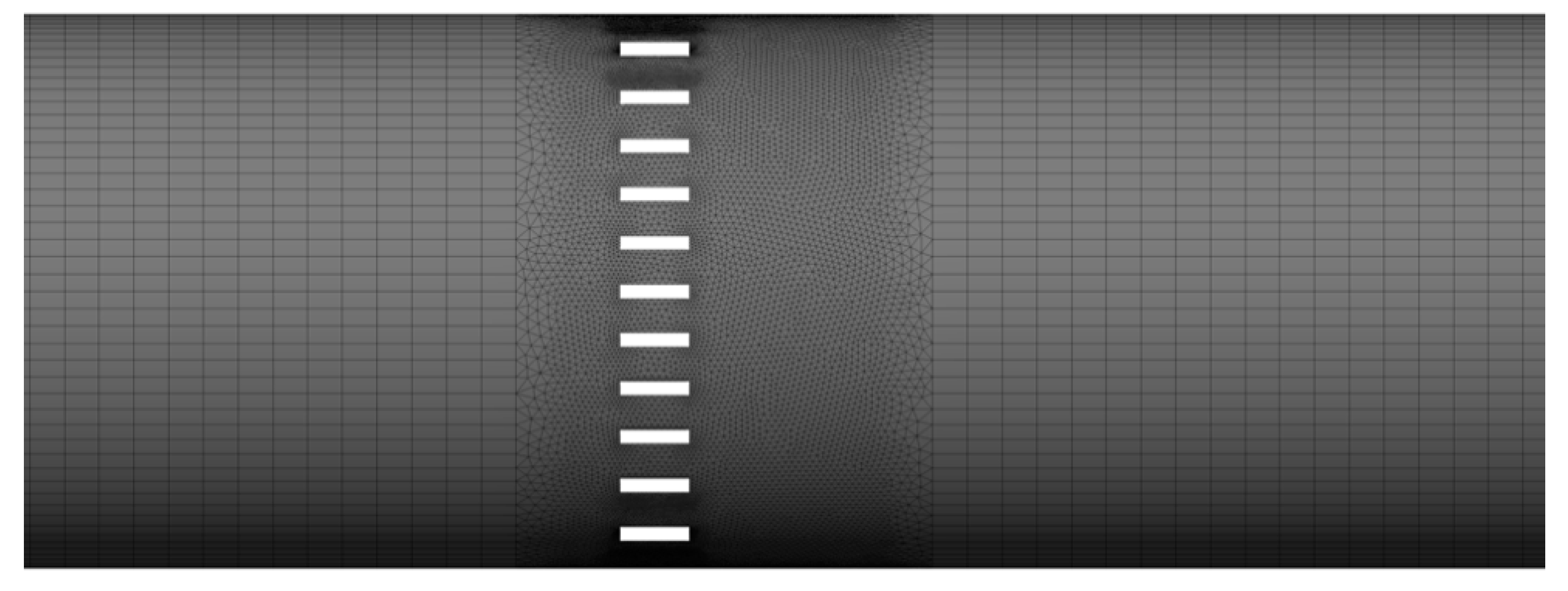
- In the second version of the geometry, the mesh partition was located at a distance of 3.995 m (Figure 3). The distance between the partitions was 0.005 m, their thickness was 0.002 m, and their number was 11. The mesh partition is shown in Figure 4. The length of the pipe fragment with mesh partitions was 0.01 m.
- (1)
- Size (number of nodes and number of elements).
- (2)
- More elements usually improve the accuracy of the solution, but up to a certain limit.
- (3)
- Maximum and minimum angle at the cell face. The more these angles deviate from 90 degrees, the more skewed the cells will be, and the less accurate the uncorrected solution will be.
- (4)
- The aspect ratio of the grid cell and the ratio of the cell volumes. In general, if these parameters are too large, the solution accuracy decreases, due to the large non-uniformity of the flow parameters.
- (5)
- Compactness of the mesh. The smaller this parameter, the more detailed the mesh. The larger this parameter, the more elements correspond to one node.
2.1.2. Environment Setting
2.1.3. Boundary Conditions
2.1.4. Applied Turbulent Flow Models
2.2. Calculation Method
2.2.1. Numerical Methods
- (a)
- Lack of steps 1, 2, and 3.
- (b)
- Applied previous mass velocity on the edges of the cells in the Equation (4).
- (c)
- Applied the previous density in non-stationary terms:
2.2.2. Computational Scheme
2.2.3. The Numerical Processing
3. Results and Discussions
3.1. Pressure and Piezometric Lines
3.1.1. The Pipe Without Mesh Partitions
- λ is the drag coefficient (take 0.039);
- L is pipeline length (m);
- D is pipeline diameter (m);
- V is the fluid velocity in the pipeline (m/s);
- g is gravity acceleration (m/s2).
3.1.2. Pipeline with Mesh Partition
3.2. Fields of Pressure, Velocity, and Concentration of Phases
4. Conclusions
- Determine the minimum resistance and the shape of the promoter, providing a change in the flow regime.
- Create a method for determining the location of the promoter in the streams.
Author Contributions
Funding
Conflicts of Interest
References
- Underbalanced Drilling: Limits and Extremes; Elsevier BV: Amsterdam, The Netherlands, 2012; pp. 109–144.
- O’Neill, L.E.; Mudawar, I. Review of two-phase flow instabilities in macro- and micro-channel systems. Int. J. Heat Mass Transf. 2020, 157, 119738. [Google Scholar] [CrossRef]
- Wang, B.; Shen, S.; Ruan, Y.; Cheng, S.; Peng, W.; Zhang, J. Simulation of Gas-Liquid Two-Phase Flow in Metallurgical Process. Acta Metall. Sin. 2020, 56, 619–632. [Google Scholar] [CrossRef]
- Wu, B.; Firouzi, M.; Mitchell, T.; Rufford, T.E.; Leonardi, C.; Towler, B. A critical review of flow maps for gas-liquid flows in vertical pipes and annuli. Chem. Eng. J. 2017, 326, 350–377. [Google Scholar] [CrossRef] [Green Version]
- Risso, F. Agitation, Mixing, and Transfers Induced by Bubbles. Annu. Rev. Fluid Mech. 2018, 50, 25–48. [Google Scholar] [CrossRef] [Green Version]
- Yao, C.; Zhao, Y.; Ma, H.; Liu, Y.; Zhao, Q.; Chen, G. Two-phase flow and mass transfer in microchannels: A review from local mechanism to global models. Chem. Eng. Sci. 2021, 229, 116017. [Google Scholar] [CrossRef]
- Fershtman, A.; Robers, L.; Prasser, H.-M.; Barnea, D.; Shemer, L. Interfacial structure of upward gas–liquid annular flow in inclined pipes. Int. J. Multiph. Flow 2020, 132, 103437. [Google Scholar] [CrossRef]
- Lin, Z.; Liu, X.; Lao, L.; Liu, H. Prediction of two-phase flow patterns in upward inclined pipes via deep learning. Energy 2020, 210, 118541. [Google Scholar] [CrossRef]
- Sunde, C.; Avdic, S.; Pázsit, I. Classification of two-phase flow regimes via image analysis and a neuro-wavelet approach. Prog. Nucl. Energy 2005, 46, 348–358. [Google Scholar] [CrossRef]
- Arellano, Y.; Hunt, A.; Haas, O.; Ma, L. On the life and habits of gas-core slugs: Characterisation of an intermittent horizontal two-phase flow. J. Nat. Gas Sci. Eng. 2020, 82, 103475. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, N.; Lei, L.; Liang, F.; Wang, X.; Wu, Z. Studies of gas-liquid two-phase flows in horizontal mini tubes using 3D reconstruction and numerical methods. Int. J. Multiph. Flow 2020, 133, 103456. [Google Scholar] [CrossRef]
- Santana, A.L.B.; Neto, M.A.M.; Morales, R.E.M. Pressure Drop of Horizontal Air–Water Slug Flow in Different Configurations of Corrugated Pipes. J. Fluids Eng. 2020, 142. [Google Scholar] [CrossRef]
- Mohmmed, A.O.; Al-Kayiem, H.H.; Osman, A.B.; Sabir, O. One-way coupled fluid–structure interaction of gas–liquid slug flow in a horizontal pipe: Experiments and simulations. J. Fluids Struct. 2020, 97, 103083. [Google Scholar] [CrossRef]
- Shannak, B.A. Frictional pressure drop of gas liquid two-phase flow in pipes. Nucl. Eng. Des. 2008, 238, 3277–3284. [Google Scholar] [CrossRef]
- Arabi, A.; Salhi, Y.; Zenati, Y.; Si-Ahmed, E.; Legrand, J. On gas-liquid intermittent flow in a horizontal pipe: Influence of sub-regime on slug frequency. Chem. Eng. Sci. 2020, 211, 115251. [Google Scholar] [CrossRef]
- Arabi, A.; Ragui, K.; Salhi, Y.; Filali, A. Slug frequency for a gas-liquid plug flow: Review and development of a new correlation. Int. Commun. Heat Mass Transf. 2020, 118, 104841. [Google Scholar] [CrossRef]
- Hayashi, K.; Kazi, J.; Yoshida, N.; Tomiyama, A. Pressure Drops of Air-Water Two-Phase Flows in Horizontal U-Bends. Int. J. Multiph. Flow 2020, 103403. [Google Scholar] [CrossRef]
- Chen, Q.; Podila, K.; Rao, Y.F.; Bowden, R.; Yang, S.K. Modelling of two-phase flows through horizontal pipes with bends at high void fractions. In Proceedings of the PBNC 2018—Pacific Basin Nuclear Conference, San Francisco, CA, USA, 30 September–4 October 2020; American Nuclear Society: La Grange Park, IL, USA, 2019; pp. 854–863. [Google Scholar]
- Chen, Q.; Podila, K.; Rao, Y.; Bowden, R.; Yang, S. Assessment of CFD for unheated gas-liquid flows with high void fraction. Nucl. Eng. Des. 2019, 341, 346–359. [Google Scholar] [CrossRef]
- Miwa, S.; Liu, Y.; Hibiki, T.; Ishii, M.; Kondo, Y.; Morita, H.; Tanimoto, K. Two-Phase Flow Induced Force Fluctuations on Pipe Bend. In International Conference on Nuclear Engineering; ASME International: New York, NY, USA, 2014. [Google Scholar]
- Abdulkadir, M.; Zhao, D.; Abdulkareem, L.; Asikolaye, N.; Hernandez-Perez, V. Insights into the transition from plug to slug flow in a horizontal pipe: An experimental study. Chem. Eng. Res. Des. 2020, 163, 85–95. [Google Scholar] [CrossRef]
- Kong, R.; Kim, S. Characterization of horizontal air–water two-phase flow. Nucl. Eng. Des. 2017, 312, 266–276. [Google Scholar] [CrossRef]
- Talley, J.D.; Worosz, T.; Kim, S.; Buchanan, J.R. Characterization of horizontal air–water two-phase flow in a round pipe part I: Flow visualization. Int. J. Multiph. Flow 2015, 76, 212–222. [Google Scholar] [CrossRef] [Green Version]
- Kong, R.; Kim, S. Characterisation of horizontal air-water two-phase flow. In International Topical Meeting on Nuclear Reactor Thermal Hydraulics; American Nuclear Society: La Grange Park, IL, USA, 2015; pp. 5559–5572. [Google Scholar]
- Murai, Y.; Tasaka, Y.; Nambu, Y.; Takeda, Y. Ultrasonic detection of moving interfaces in gas–liquid two-phase flow. Flow Meas. Instrum. 2010, 21, 356–366. [Google Scholar] [CrossRef]
- Zimmer, M.D.; Bolotnov, I. Exploring Two-Phase Flow Regime Transition Mechanisms Using High-Resolution Virtual Experiments. Nucl. Sci. Eng. 2020, 194, 708–720. [Google Scholar] [CrossRef]
- Shadloo, M.S.; Rahmat, A.; Karimipour, A.; Wongwises, S. Estimation of Pressure Drop of Two-Phase Flow in Horizontal Long Pipes Using Artificial Neural Networks. J. Energy Resour. Technol. 2020, 142, 1–21. [Google Scholar] [CrossRef]
- Rodrigues, R.L.; Cozin, C.; Naidek, B.P.; Neto, M.A.M.; Da Silva, M.J.; Morales, R.E.M. Statistical features of the flow evolution in horizontal liquid-gas slug flow. Exp. Therm. Fluid Sci. 2020, 119, 110203. [Google Scholar] [CrossRef]
- Khan, I.; Wang, M.; Zhang, Y.; Tian, W.; Su, G.; Qiu, S. Two-phase bubbly flow simulation using CFD method: A review of models for interfacial forces. Prog. Nucl. Energy 2020, 125, 103360. [Google Scholar] [CrossRef]
- Vaidheeswaran, A.; Hibiki, T. Bubble-induced turbulence modeling for vertical bubbly flows. Int. J. Heat Mass Transf. 2017, 115, 741–752. [Google Scholar] [CrossRef]
- Chuang, T.-J.; Hibiki, T. Interfacial forces used in two-phase flow numerical simulation. Int. J. Heat Mass Transf. 2017, 113, 741–754. [Google Scholar] [CrossRef]
- Jeon, S.-S.; Kim, S.-J.; Park, G.-C. Numerical study of condensing bubble in subcooled boiling flow using volume of fluid model. Chem. Eng. Sci. 2011, 66, 5899–5909. [Google Scholar] [CrossRef]
- Wilcox, D.C. Turbulence Modeling for CFD, 3rd ed.; DCW Industries, Inc.: La Cañada Flintridge, CA, USA, 2006; ISBN 978-1-928729-08-2. [Google Scholar]
- Jones, W.; Launder, B. The prediction of laminarization with a two-equation model of turbulence. Int. J. Heat Mass Transf. 1972, 15, 301–314. [Google Scholar] [CrossRef]
- Hirt, C.; Nichols, B. Volume of fluid (VOF) method for the dynamics of free boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- ANSYS Fluent Theory Guide; ANSYS, Inc.: Canonsburg, PA, USA, 2016.
- Handbook of Computational Fluid Mechanics. In Handbook of Computational Fluid Mechanics; Elsevier BV: Amsterdam, The Netherlands, 1996.
- ANSYS Fluent User’s Guide; ANSYS, Inc.: Canonsburg, PA, USA, 2013.
- Idelchik, I. Handbook of Hydraulic Resistance, Revised and Augmented; Begell House: Redding, CA, USA, 2008; 861p. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Type 1 | Type 2 |
|---|---|---|
| Number of nodes | 3,803,976 | 4,165,141 |
| Number of elements | 3,720,000 | 5,823,880 |
| Maximum angle at cell face | 90 | 50.04 |
| Minimum angle at cell face | 49.68 | 16.03 |
| Cell aspect ratio | 4.52 | 4.52 |
| Cell volume ratio | 1.37 | 178.75 |
| Compactness of mesh | 8 | 42 |
| Gas | Water | |
|---|---|---|
| Density, kg/m3 | 1.225 | 998.1 |
| Dynamic viscosity, Pa·s | 0.00017894 | 0.001003 |
| A Moment in Time, s | Pressure Fields, Pa |
|---|---|
| 0.2 s |  |
| 0.4 s |  |
| 0.6 s |  |
| 0.8 s |  |
| 1.0 s |  |
| A Moment in Time, s | Phase Velocity Fields, m/s |
|---|---|
| 0.2 s |  |
| 0.4 s |  |
| 0.6 s |  |
| 0.8 s |  |
| 1.0 s |  |
| A Moment in Time, s | Volume Fraction of the Liquid Phase |
|---|---|
| 0.2 s |  |
| 0.4 s |  |
| 0.6 s |  |
| 0.8 s |  |
| 1.0 s |  |
| A Moment in Time, s | Pressure Fields, Pa |
|---|---|
| 0.2 s |  |
| 0.4 s |  |
| 0.6 s |  |
| 0.8 s |  |
| 1.0 s |  |
| A Moment in Time, s | Phase Velocity, m/s |
|---|---|
| 0.2 s |  |
| 0.4 s |  |
| 0.6 s |  |
| 0.8 s |  |
| 1.0 s |  |
| 1.2 s |  |
| A Moment in Time, s | Volume Fraction of the Liquid Phase |
|---|---|
| 0.2 s |  |
| 0.4 s |  |
| 0.6 s |  |
| 0.8 s |  |
| 1.0 s |  |
| 1.2 s |  |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sergeev, V.; Vatin, N.; Kotov, E.; Nemova, D.; Khorobrov, S. Slug Regime Transitions in a Two-Phase Flow in Horizontal Round Pipe. CFD Simulations. Appl. Sci. 2020, 10, 8739. https://doi.org/10.3390/app10238739
Sergeev V, Vatin N, Kotov E, Nemova D, Khorobrov S. Slug Regime Transitions in a Two-Phase Flow in Horizontal Round Pipe. CFD Simulations. Applied Sciences. 2020; 10(23):8739. https://doi.org/10.3390/app10238739
Chicago/Turabian StyleSergeev, Vitaly, Nikolai Vatin, Evgeny Kotov, Darya Nemova, and Svyatoslav Khorobrov. 2020. "Slug Regime Transitions in a Two-Phase Flow in Horizontal Round Pipe. CFD Simulations" Applied Sciences 10, no. 23: 8739. https://doi.org/10.3390/app10238739