Real-Time Train Tracking from Distributed Acoustic Sensing Data

Abstract
:1. Introduction
2. Materials and Methods
2.1. DAS Test Data Acquisition
2.2. Annotations
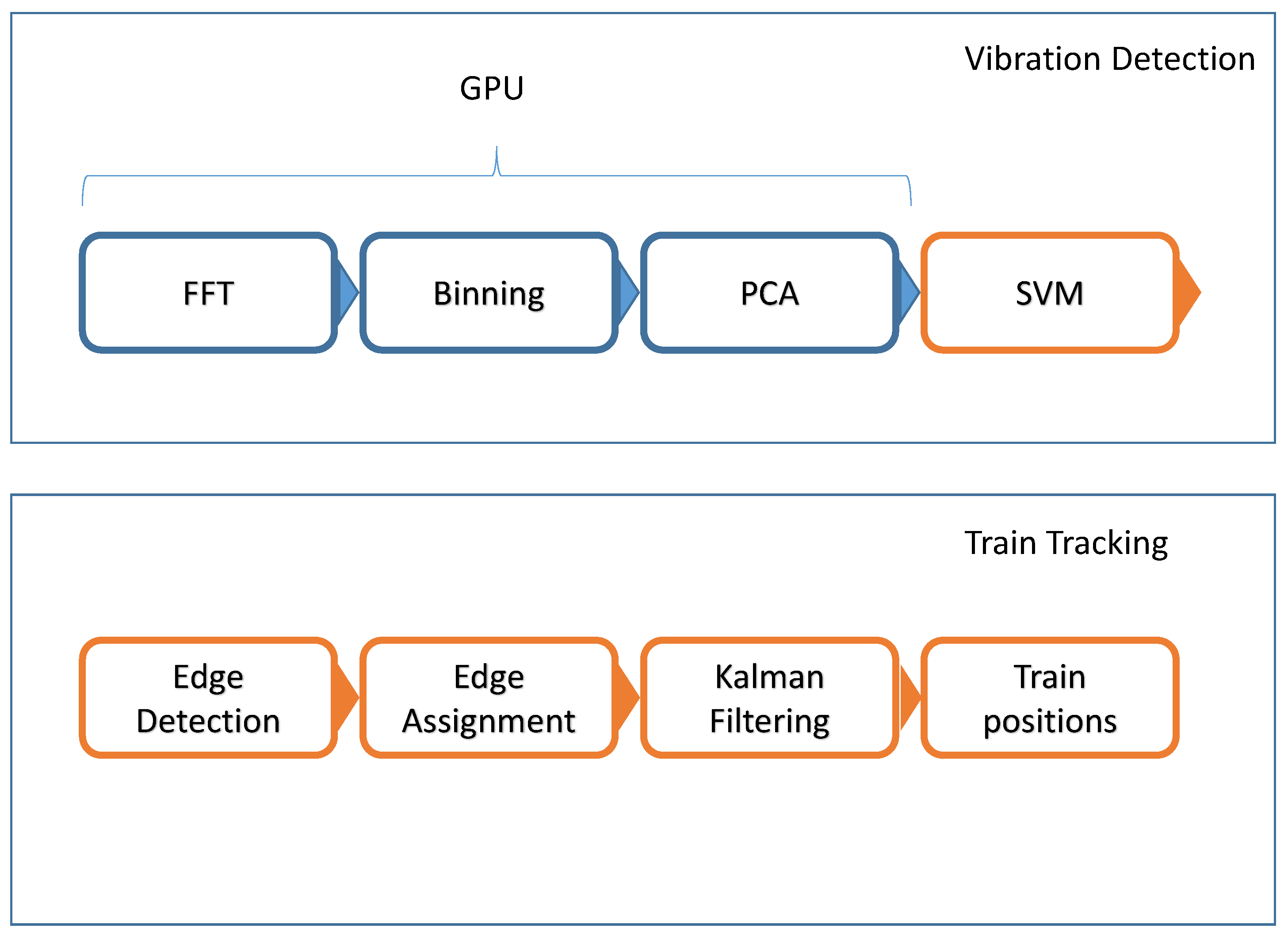
2.3. Vibration Detection
- Computation of the spectral energy in 10 frequency bins.
- Normalization of the 10 energy values to make them sum up to 1.
- Using Principal Component Analysis (PCA) to reduce the 10 feature values to two feature values.
- Employ a pre-trained Support Vector Machine (SVM) to classify the feature vector of length 2 as vibration or background.
2.4. Train Tracking
- Extraction of edges from the data.
- Assigning the edges to objects and creating new objects.
- Applying a Kalman filter to smooth the trajectories of all the objects.
2.5. GPU Computation for Feature Extraction
3. Results
3.1. Train Tracking Stages
3.2. Evaluation of Tracking Accuracy
3.3. Evaluation of Tracking Reliability
- Identify the tracks that do not end at the end of the monitored cable section or in a station as potential tracking errors.
- Exclude trains that stop on the open track as in that case the train ID is lost based on visual evaluation.
- Exclude artifact tracks based on visual evaluation.
- Count the total number of train tracks and the number of excluded tracks.
3.3.1. Test Site 1: Tunnel
3.3.2. Test Site 2: Open track
3.3.3. Comparison with the Literature
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Gao, S.; Dong, H.; Ning, B.; Zhang, Q. Cooperative Prescribed Performance Tracking Control for Multiple High-Speed Trains in Moving Block Signaling System. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2740–2749. [Google Scholar] [CrossRef]
- Hill, R.; Bond, L. Modelling moving-block railway signalling systems using discrete-event simulation. In Proceedings of the 1995 IEEE/ASME Joint Railroad Conference, Baltimore, MD, USA, 4–6 April 1995; pp. 105–111. [Google Scholar] [CrossRef]
- Williams, C. The next ETCS Level? In Proceedings of the 2016 IEEE International Conference on Intelligent Rail Transportation (ICIRT), Birmingham, UK, 23–25 August 2016; pp. 75–79. [Google Scholar] [CrossRef]
- Albrecht, T.; Luddecke, K.; Zimmermann, J. A precise and reliable train positioning system and its use for automation of train operation. In Proceedings of the 2013 IEEE International Conference on Intelligent Rail Transportation Proceedings, Beijing, China, 30 August–1 September 2013; pp. 134–139. [Google Scholar] [CrossRef]
- Champavère, A. New OTDR Measurement and Monitoring Techniques. In Proceedings of the Optical Fiber Communication Conference (OFC 2014), San Francisco, CA, USA, 9–13 March 2014; p. W3D.1. [Google Scholar] [CrossRef]
- Dean, T.; Hartog, A.; Papp, B.; Frignet, B. Fibre optic based vibration sensing: Nature of the measurement. In Proceedings of the 3rd EAGE Workshop on Borehole Geophysics, Athens, Greece, 19–22 April 2015. [Google Scholar]
- Bao, X.; Chen, L. Recent Progress in Distributed Fiber Optic Sensors. Sensors 2012, 12, 8601–8639. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baldwin, C.S. Brief history of fiber optic sensing in the oil field industry. In Proceedings of the Fiber Optic Sensors and Applications XI, Baltimore, MD, USA, 5–9 May 2014; p. 909803. [Google Scholar] [CrossRef]
- Juarez, J.C.; Maier, E.W.; Choi, K.N.; Taylor, H.F. Distributed fiber-optic intrusion sensor system. J. Lightwave Technol. 2005, 23, 2081. [Google Scholar] [CrossRef]
- Peng, F.; Wu, H.; Jia, X.H.; Rao, Y.J.; Wang, Z.N.; Peng, Z.P. Ultra-long high-sensitivity Φ-OTDR for high spatial resolution intrusion detection of pipelines. Opt. Exp. 2014, 22, 13804–13810. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Chen, R.; Wei, F.; Wu, D. Experimental and application of spiral distributed optical fiber sensors based on OTDR. In Proceedings of the 2011 International Conference on Electric Information and Control Engineering, Wuhan, China, 15–17 April 2011; pp. 5905–5909. [Google Scholar] [CrossRef]
- Timofeev, A.V.; Egorov, D.V.; Denisov, V.M. The Rail Traffic Management with Usage of C-OTDR Monitoring Systems. World Acad. Sci. Eng. Technol. Int. J. Comput. Electr. Autom. Control Inf. Eng. 2015, 9, 1492–1495. [Google Scholar]
- Timofeev, A.V. Monitoring the Railways by Means of C-OTDR Technology. Int. J. Mech. Aerosp. Ind. Mech. Eng. 2015, 9, 634–637. [Google Scholar]
- Peng, F.; Duan, N.; Rao, Y.J.; Li, J. Real-Time Position and Speed Monitoring of Trains Using Phase-Sensitive OTDR. Photonics Technol. Lett. 2014, 26, 2055–2057. [Google Scholar] [CrossRef]
- Papp, A.; Wiesmeyr, C.; Litzenberger, M.; Garn, H.; Kropatsch, W. A real-time algorithm for train position monitoring using optical time-domain reflectometry. In Proceedings of the 2016 IEEE International Conference on Intelligent Rail Transportation (ICIRT), Birmingham, UK, 23–25 August 2016; pp. 89–93. [Google Scholar] [CrossRef]
- Papp, A.; Wiesmeyr, C.; Litzenberger, M.; Garn, H.; Kropatsch, W. Train Detection and Tracking in Optical Time Domain Reflectometry (OTDR) Signals. In Proceedings of the German Conference on Pattern Recognition, Hannover, Germany, 12–15 September 2016; pp. 320–331. [Google Scholar]
- Bradski, G. The OpenCV Library. Dr. Dobb’s J. Softw. Tools 2000. Available online: https://github.com/opencv/opencv/wiki/CiteOpenCV (accessed on 7 January 2020).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Laser pulse length | 100 | ns |
| Laser wavelength | 1550 | nm |
| Pulse repetition frequency | 2000 | Hz |
| Signal sampling frequency | 150 | kHz |
| Signal ADC sampling resolution | 16 | bit |
| Fiber light speed | 202,020,208 | m/s |
| Train ID | Error Signal 1 [m] | Error Signal 2 [m] |
|---|---|---|
| 23468 | 49.64 | 44.20 |
| 29515 | 48.96 | 1.36 |
| 2330 | 51.68 | 38.76 |
| 73 | 79.56 | 37.40 |
| 23488 | 71.40 | 23.12 |
| 29535 | 44.88 | 17.00 |
| 23508 | 31.28 | 86.36 |
| 29555 | 31.28 | 19.72 |
| 103 | 64.60 | 57.12 |
| 90093 | 43.52 | 39.44 |
| 23528 | 49.64 | 64.60 |
| 29575 | 2.04 | 61.20 |
| Average | 47.37 | 40.86 |
| Test Site 1 | Test Site 2 | |
|---|---|---|
| Cable stretch observed (meters) | 13,600–25,900 | 0–8840 |
| Cable stretch observed (segments) | 20,000–38,000 | 0–13,000 |
| Number of hours observed | 477 | 538 |
| Cable installation method | Cable trench in tunnel | Cable attached to rail on open track |
| Number of tracks | 2174 | 1071 |
| Number of correct tracks | 2141 | 1059 |
| % of correct trains | 98% | 99% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wiesmeyr, C.; Litzenberger, M.; Waser, M.; Papp, A.; Garn, H.; Neunteufel, G.; Döller, H. Real-Time Train Tracking from Distributed Acoustic Sensing Data. Appl. Sci. 2020, 10, 448. https://doi.org/10.3390/app10020448
Wiesmeyr C, Litzenberger M, Waser M, Papp A, Garn H, Neunteufel G, Döller H. Real-Time Train Tracking from Distributed Acoustic Sensing Data. Applied Sciences. 2020; 10(2):448. https://doi.org/10.3390/app10020448
Chicago/Turabian StyleWiesmeyr, Christoph, Martin Litzenberger, Markus Waser, Adam Papp, Heinrich Garn, Günther Neunteufel, and Herbert Döller. 2020. "Real-Time Train Tracking from Distributed Acoustic Sensing Data" Applied Sciences 10, no. 2: 448. https://doi.org/10.3390/app10020448