An Improved Calibration Method for the Misalignment Error of a Triaxial Magnetometer and Inertial Navigation System in a Three-Component Magnetic Survey System

Abstract
:1. Introduction
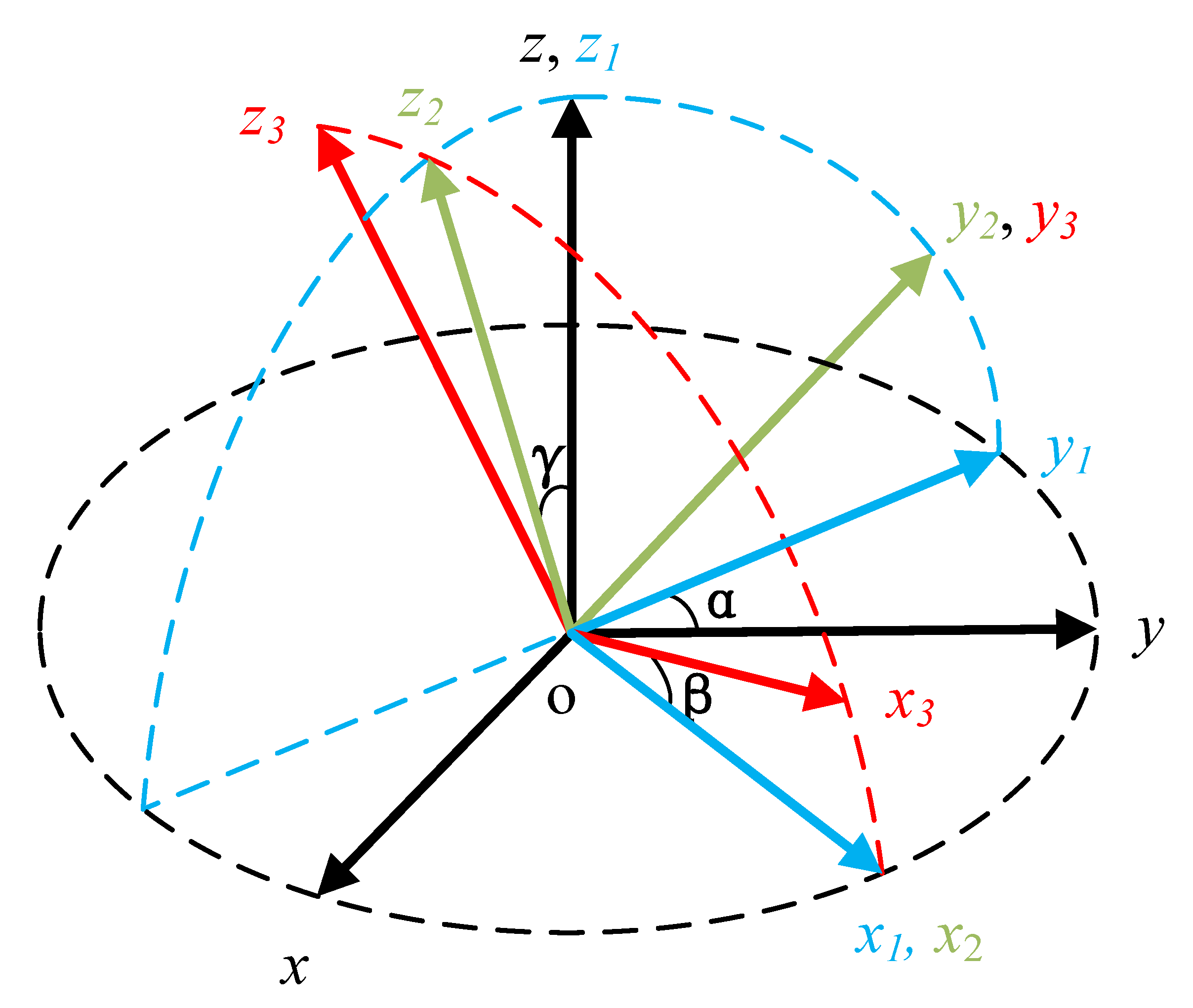
2. Misalignment Error Analyses
3. Calibration Method
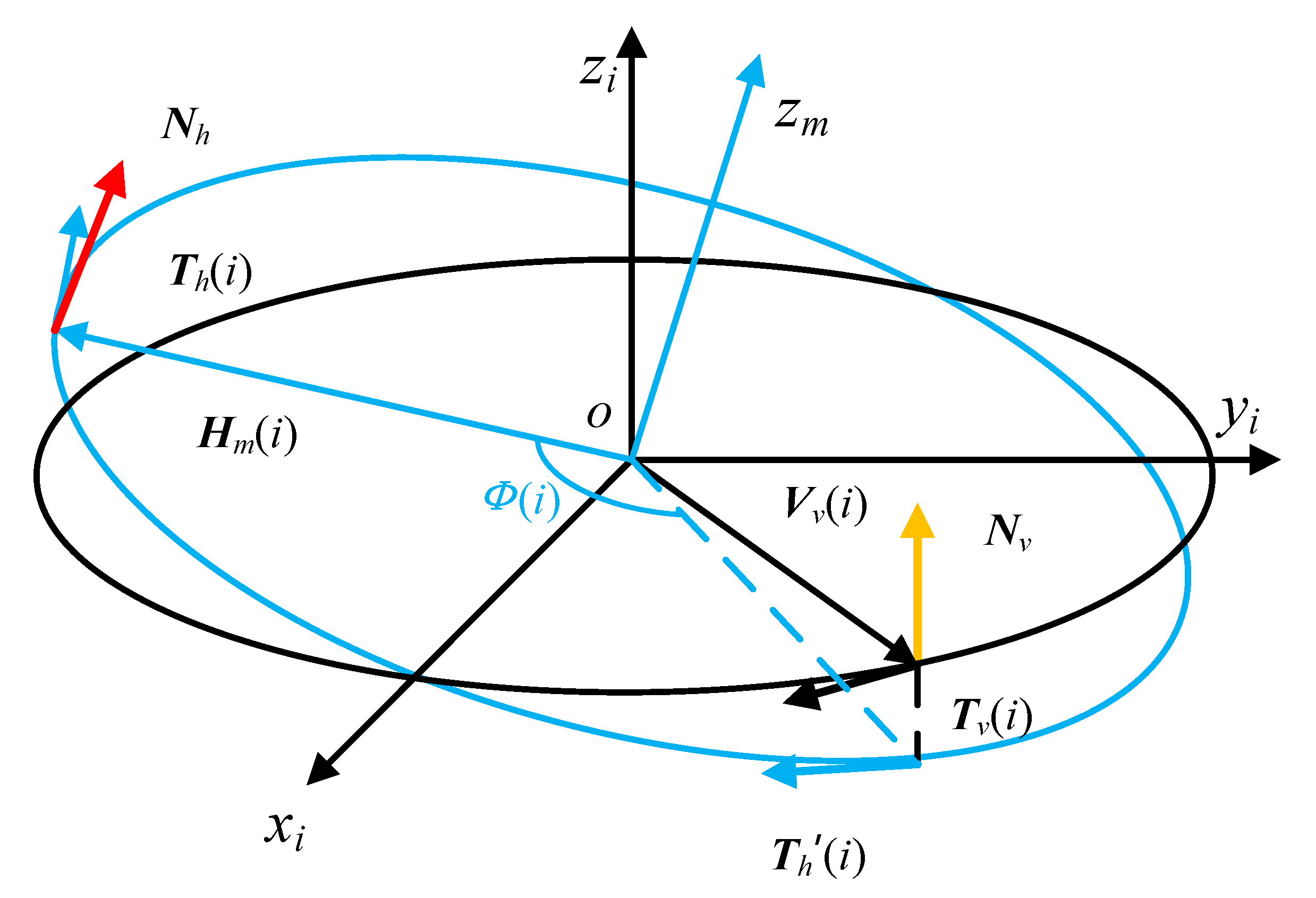
3.1. Virtual Auxiliary Vector
3.2. Calibration Parameters Solution
4. Simulation
4.1. Setup of Simulation Experiment
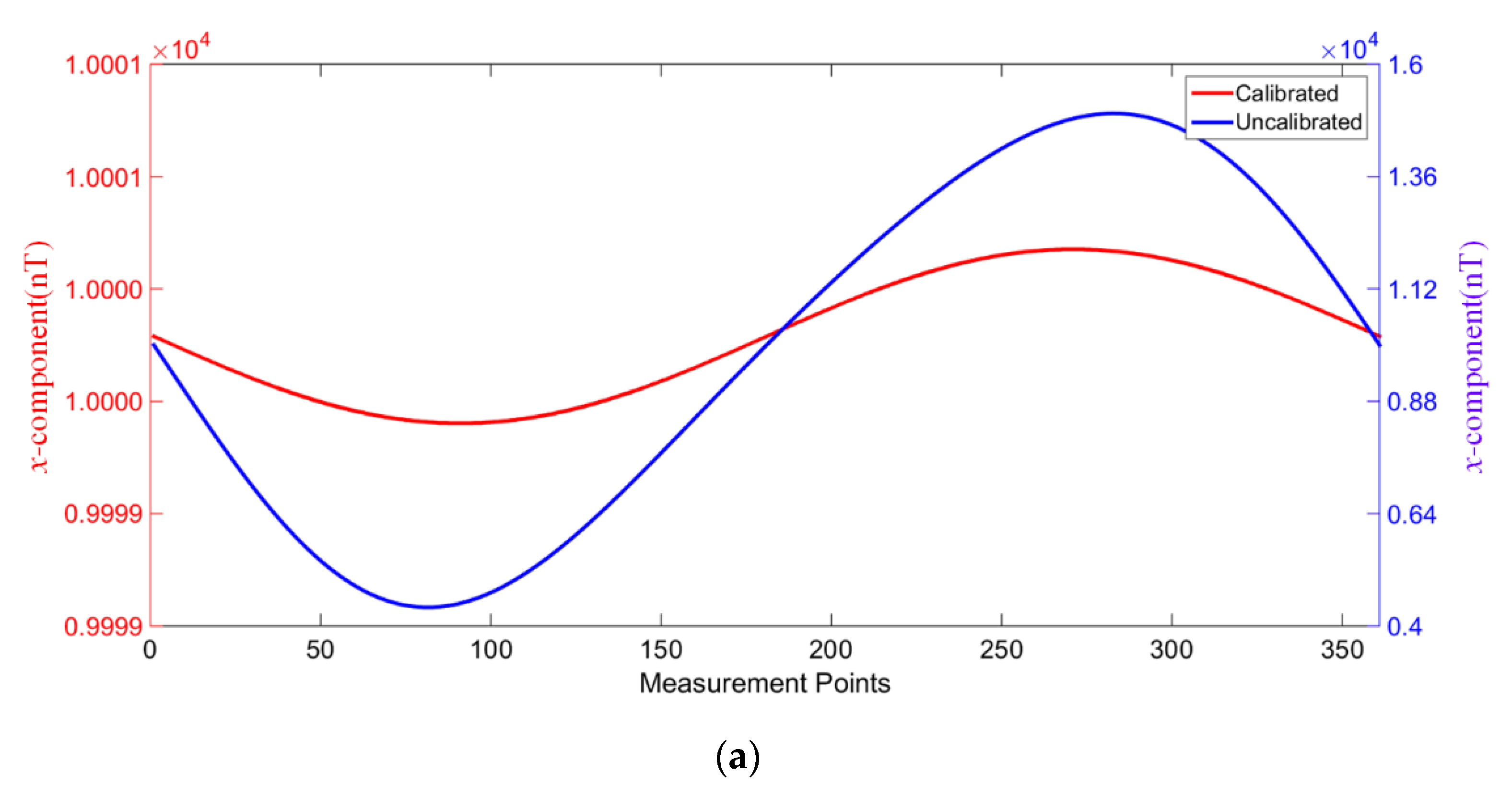
4.2. Simulation Results and Analysis
5. Experiment
5.1. Setup of Experiment
5.2. Experiment Results and Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Virgil, C.; Ehmann, S.; Hördt, A.; Leven, M.; Steveling, E. Reorientation of three-component borehole magnetic data. Geophys. Prospect. 2015, 63, 225–242. [Google Scholar] [CrossRef]
- Sheinker, A.; Frumkis, L.; Ginzburg, B.; Salomonski, N.; Kaplan, B.Z. Magnetic Anomaly Detection Using a Three-Axis Magnetometer. IEEE Trans. Magn. 2009, 45, 160–167. [Google Scholar] [CrossRef]
- Barczyk, M.; Lynch, A.F. Integration of a Triaxial Magnetometer into a Helicopter UAV GPS-Aided INS. IEEE Trans. Ind. Electron. 2012, 48, 2947–2960. [Google Scholar] [CrossRef]
- Heekwon, N.O.; Kee, C. Enhancement of GPS/INS Navigation System Observability Using a Triaxial Magnetometer. Trans. Jpn. Soc. Aeronaut. Space Sci. 2019, 62, 125–136. [Google Scholar]
- Mu, Y.; Wang, C.; Zhang, X.; Xie, W. A Novel Calibration Method for Magnetometer Array in Nonuniform Background Field. IEEE Trans. Ind. Electron. 2019, 68, 3677–3685. [Google Scholar] [CrossRef]
- Bernalpolo, P.; Martinezbarbera, H. Temperature-Dependent Calibration of Triaxial Sensors: Algorithm, Prototype, and Some Results. IEEE Sens. J. 2020, 20, 876–884. [Google Scholar] [CrossRef]
- Pan, D.; Li, J.; Jin, C.; Liu, T.; Lin, S.; Li, L. A New Calibration Method for Triaxial Fluxgate Magnetometer Based on Magnetic Shielding Room. IEEE Trans. Ind. Electron. 2020, 67, 4183–4192. [Google Scholar] [CrossRef]
- Ghasemimoghadam, S.; Homaeinezhad, M.R. Attitude determination by combining arrays of MEMS accelerometers, gyros, and magnetometers via quaternion-based complementary filter. Int. J. Numer. Model. Electron. Netw. Device Field 2018, 31, e2282. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, L.; Li, K.; Han, H. Analysis and improvement of attitude output accuracy in tri-axis rotational inertial navigation system. IEEE Sens. 2020, 20, 6091–6100. [Google Scholar] [CrossRef]
- Yue, Z.; Lian, B.; Tang, C.; Tong, K. A novel adaptive federated filter for GNSS/INS/VO integrated navigation system. Meas. Sci. Technol. 2020, 31, 085102. [Google Scholar] [CrossRef]
- Primdahl, F. Astrid-2 magnetometer and star sensor intercalibration. Magnetic Observatory 15–16 May 1997. Exp. Biol. Med. 1997, 58, 205–209. [Google Scholar]
- Pang, H.; Zhu, X.; Pan, M.; Zhang, Q.; Wan, C.; Luo, S.; Chen, D.; Chen, J.; Li, J.; Lv, Y. Misalignment calibration of geomagnetic vector measurement system using parallelepiped frame rotation method. J. Magn. Magn. Mater. 2016, 419, 309–316. [Google Scholar] [CrossRef]
- Li, X.; Li, Z. A new Calibration Method for Triaxial Field Sensors in Strap-down Navigation systems. Meas. Sci. Technol. 2012, 23, 105105. [Google Scholar] [CrossRef]
- Zhu, X.; Zhao, T.; Cheng, D.; Zhou, Z. A three-step calibration method for tri-axial field sensors in a 3D magnetic digital compass. Meas. Sci. Technol. 2017, 28, 055106. [Google Scholar] [CrossRef]
- Fang, J.; Sun, H.; Cao, J.; Zhang, X.; Tao, Y. A Novel Calibration Method of Magnetic Compass Based on Ellipsoid Fitting. IEEE Trans. Instrum. Meas. 2011, 60, 2053–2061. [Google Scholar] [CrossRef]
- Fang, J.; Sun, H.; Cao, J.; Zhang, X.; Tao, Y. A Calibration Method for the Misalignment Error between Inertial Navigation System and Tri-Axial Magnetometer in Three-Component Magnetic Measurement System. IEEE Sens. J. 2019, 19, 12217–12223. [Google Scholar]
- Cheng, H.; Gupta, K.C. An Historical Note on Finite Rotations. J. Appl. Mech. 1989, 56, 139–145. [Google Scholar] [CrossRef]
- Baritzhack, I.Y. Extension of Euler’s theorem to n-dimensional spaces. IEEE Trans. Aerosp. Electron. Syst. 1989, 25, 903–909. [Google Scholar]
- Paielli, R.A. Global transformation of rotation matrices to Euler parameters. J. Guid. Control Dyn. 1992, 15, 1309–1311. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Setting Value |
|---|---|
| Magnetic background field | [10,000 30,000 20,000] |
| Virtual vector | [3000 2000 2000] |
| Parameter | Performance |
|---|---|
| x-component | ≤0.5 nT |
| y-component | ≤0.5 nT |
| z-component | ≤0.5 nT |
| Sensor | Feature | Value | |
|---|---|---|---|
| Magnetometer (Bartington, Witney, UK) | Measurement range | ±100,000 nT | |
| Accuracy | ±0.1 nT | ||
| Orthogonality error | <0.1° | ||
| Scaling error | <±0.5° | ||
| Offset error | <±5 nT | ||
| INS (NovAtel, Hexagon, SWE) | Accuracy (RMSE) | Heading | 0.06° |
| Pitch | 0.015° | ||
| Roll | 0.015° | ||
| Parameter | Fluctuation Range (nT) | Absolute Deviation Value (nT) | Standard Deviation Value (nT) | |||
|---|---|---|---|---|---|---|
| calibrated | uncalibrated | calibrated | uncalibrated | calibrated | uncalibrated | |
| x component | 20.991 | 1914.921 | 4.144 | 573.678 | 4.830 | 648.881 |
| y component | 33.105 | 3588.321 | 8.222 | 1187.153 | 9.267 | 1305.149 |
| z component | 23.936 | 1868.731 | 4.988 | 614.812 | 5.831 | 677.237 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Cheng, D.; Gao, Q.; Wang, Y.; Yue, L.; Wang, M.; Zhao, J. An Improved Calibration Method for the Misalignment Error of a Triaxial Magnetometer and Inertial Navigation System in a Three-Component Magnetic Survey System. Appl. Sci. 2020, 10, 6707. https://doi.org/10.3390/app10196707
Li S, Cheng D, Gao Q, Wang Y, Yue L, Wang M, Zhao J. An Improved Calibration Method for the Misalignment Error of a Triaxial Magnetometer and Inertial Navigation System in a Three-Component Magnetic Survey System. Applied Sciences. 2020; 10(19):6707. https://doi.org/10.3390/app10196707
Chicago/Turabian StyleLi, Supeng, Defu Cheng, Quanming Gao, Yi Wang, Liangguang Yue, Mingchao Wang, and Jing Zhao. 2020. "An Improved Calibration Method for the Misalignment Error of a Triaxial Magnetometer and Inertial Navigation System in a Three-Component Magnetic Survey System" Applied Sciences 10, no. 19: 6707. https://doi.org/10.3390/app10196707