3.1. Numerical Benchmark: Calibration of a SDoF Bouc–Wen Type Hysteretic System
The Bouc–Wen model of hysteresis is widely used in structural engineering [
29,
30,
31,
32,
33,
34]. The model was proposed by Bouc [
35], and thereafter modified by Wen [
36]. The differential equation governing the motion of a single degree of freedom (SDoF) is written in the form:
where
is the mass of the system,
is the viscous linear damping coefficient,
is the displacement,
is the restoring force, and
is the external excitation.
and
denote derivations in time. According to the Bouc–Wen model, the restoring force is given by the following expression:
where
represents the elastic component whereas
is the hysteretic component which depends on the past history of the system response,
is the initial stiffness of the system,
is the ratio between the final stiffness and initial one and
is the hysteretic displacement as defined by Baber and Noori [
37] to enhance the capacity of the original model to represent hysteretic cycles:
In Equation (12) the parameters
and
control the shape of the cycles, while the additional parameters
,
and
are degradation functions in terms of the dissipated hysteretic energy
and take into account the stiffness and strength degradation:
where the constant values of
A0,
are usually set to unity [
38]. Whereas the values
are constant terms which specify the amount of stiffness and strength degradation [
39].
Finally, the dissipated hysteretic energy
is given by:
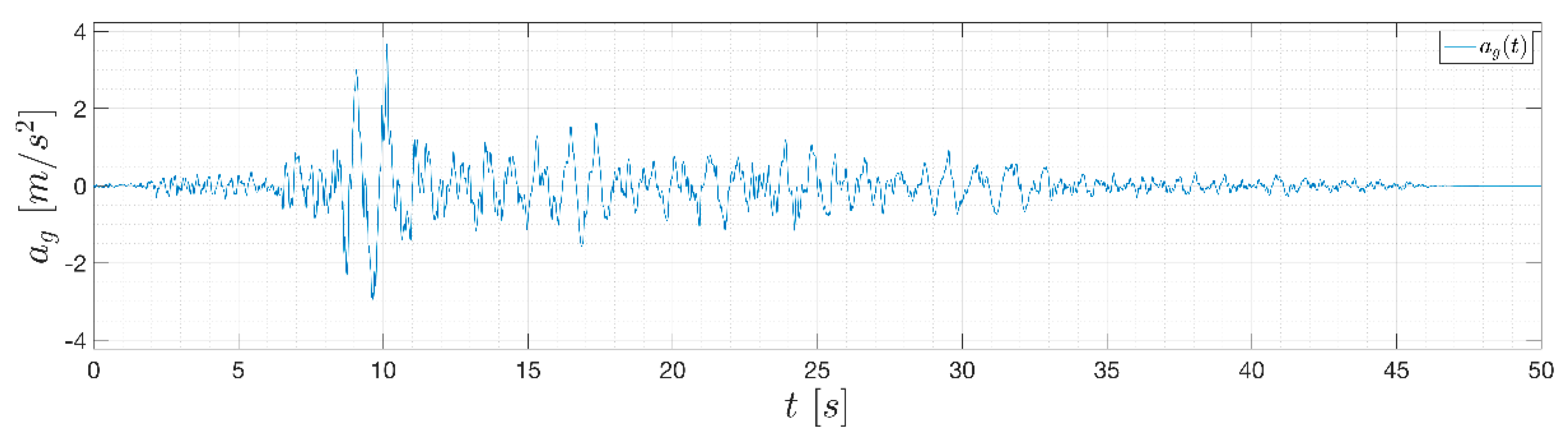
A record of the Montenegro earthquake (1979) was selected from the PEER Ground Motion Database (PEER, 2019) as seismic excitation (
Figure 2) for the benchmark.
This input excitation was used to simulate the response of a SDoF Bouc–Wen–Baber–Noori (BWBN) nonlinear system with mass of
and monitored by a dynamic monitoring system composed of one accelerometer installed on the system lumped mass. The initial stiffness
of the system was calibrated with the objective of obtaining a plausible system frequency for a masonry structure of approximately
. A damping ratio of
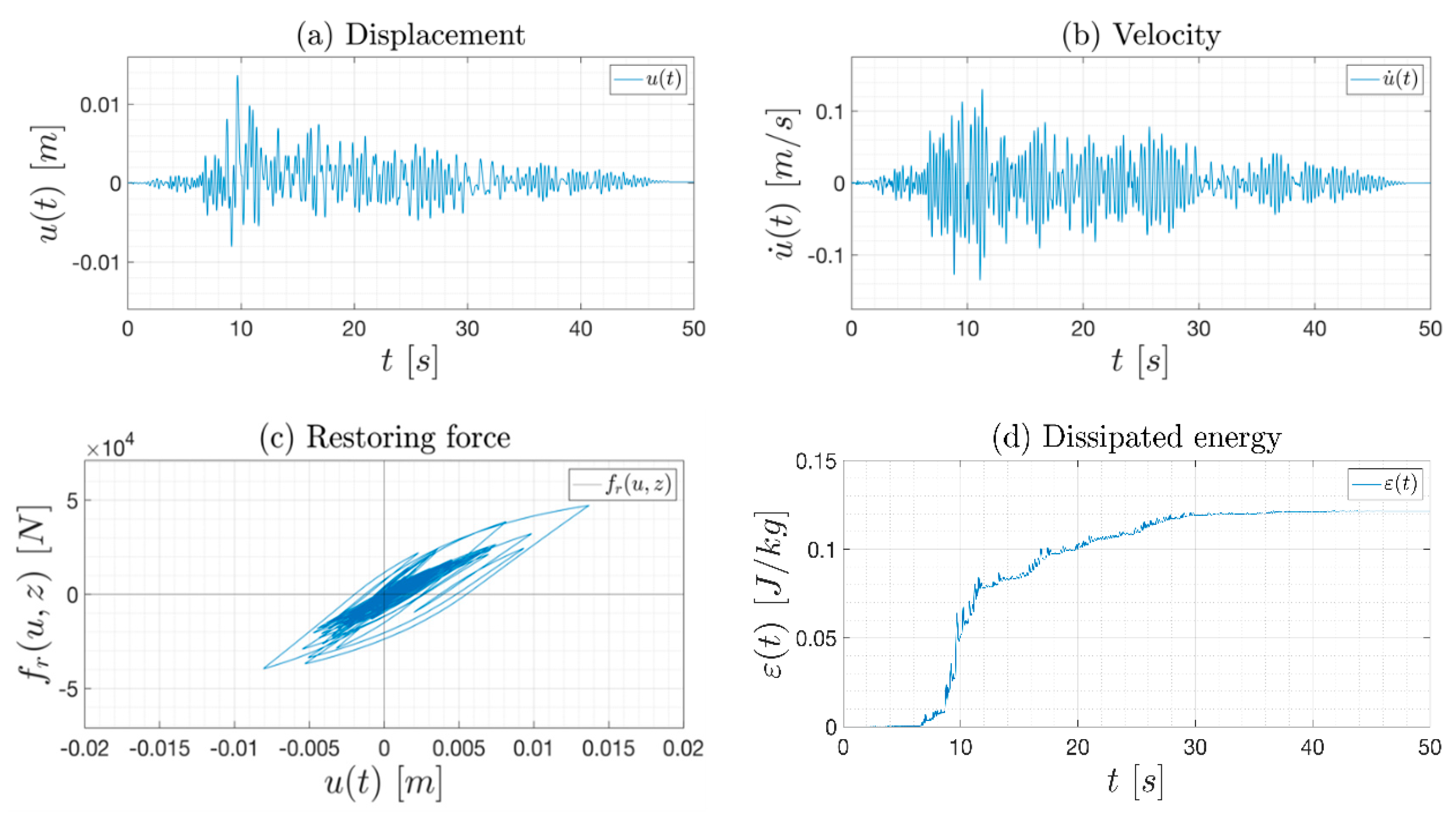
was adopted according to relevant literature on masonry structures. Finally, the remaining BWBN parameters used to generate the simulated record are presented in
Table 1, while
Figure 3 depicts the simulation record data. The Bayesian calibration was then carried out on the simulated velocity response. The latter was chosen because it is simpler to describe such a system by a single ODE with respect to velocity. Deterministic values were set for the following parameters of the BWBN model:
and also for the damping ratio,
. The latter assumption was made to release uncertainties related to the identification of
from the calibration process. Instead, the remaining ones were considered independent random variables with associated distributions given in
Table 2 and constitute the vector of uncertain model parameters
. It is worth specifying that the degradation effect of the BWBN model has been neglected on purpose, in order to introduce a discrepancy in the model used for emulating the reference response of the system. Besides, no uncertainties in input excitation have been considered herein, in order to address them only on the model side. The first moments of the prior probability density functions (PDFs) of model parameters
and α, namely
and
, were selected by two linear regressions on the reference restoring force curve for small and high displacements. The standard deviations of these parameters were chosen in order to take into account an amount of variation from these values of the 10%. It is worth noticing that in
Table 2 a new random variable
was introduced in order to guarantee the bounded-input, bounded-output (BIBO) stability [
40]. Indeed, assuming as prior knowledge on the parameter
the required BIBO stability condition (i.e.,
being uniformly distributed between the bounds
), the conditional distribution
must be uniform.
This can be achieved by transforming the input variables, namely removing the parameter
and introducing an auxiliary variable
Hence, for a joint realization of the parameters
and
, the actual parameter reads:
for
. The standard deviations of the latter parameters were computed trivially once the supports of the uniform distributions were defined. To infer the unknown residual variances
(Equation (9)), a uniform prior distribution was assumed:
whose standard deviation was set equal to the maximum of the absolute value over the time of the experimental observation
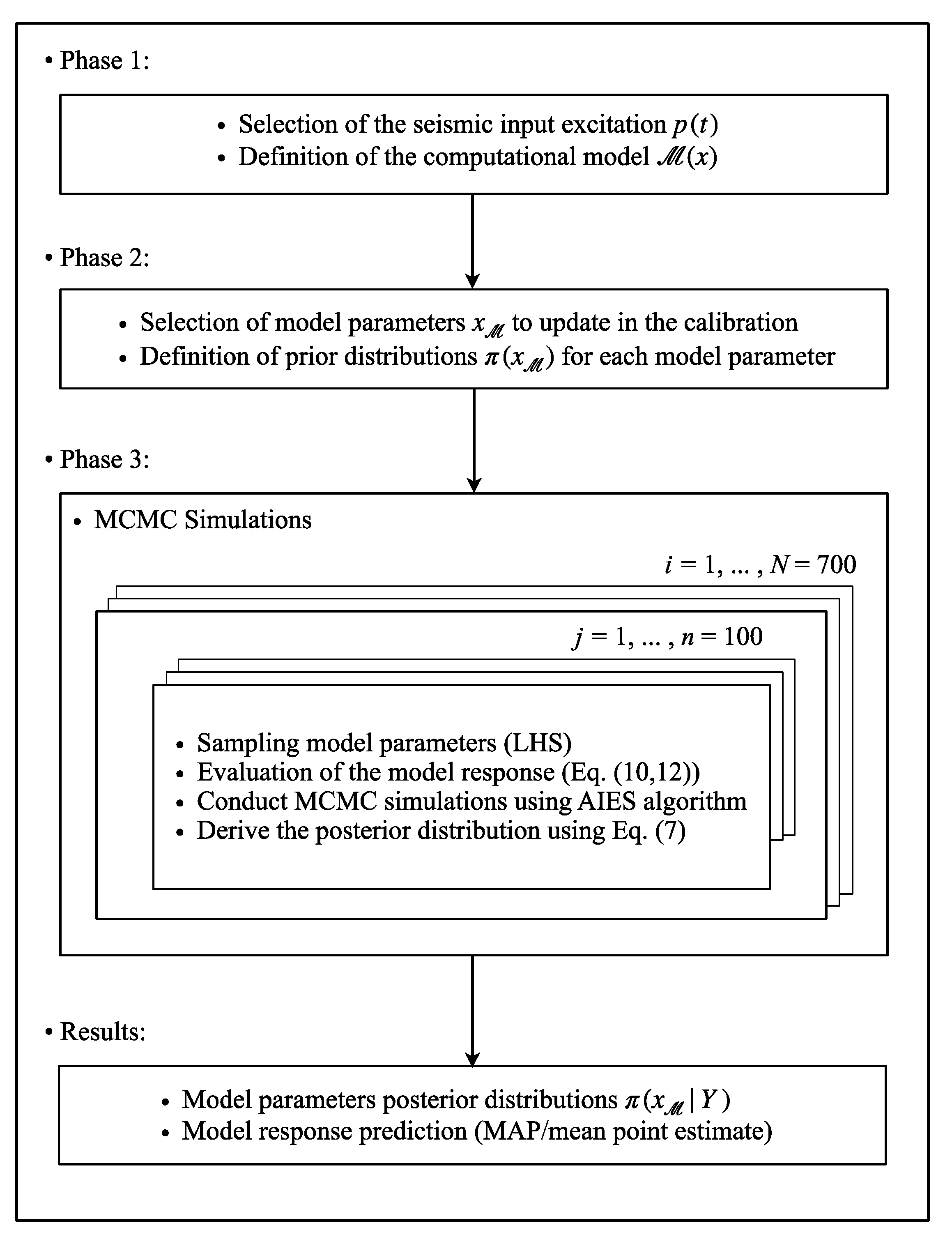
. Markov Chain Monte Carlo (MCMC) simulations have been conducted using MATLAB-based Uncertainty Quantification framework UQLab-V1.3-113
® [
6] with 100 chains, 700 steps and AIES solver algorithm [
28]. The number of the BWBN forward model
calls in MCMC was 70′000. The system of ordinary differential equation (ODEs; Equations (10) and (12)) was solved with the MATLAB solver ode45 (explicit Runge–Kutta method with relative error tolerance 1 × 10
−3). The Latin hypercube sampling (LHS) method was used to get the parameters prior distributions (
Table 2) of the BWBN model, which are shown in
Figure 4.
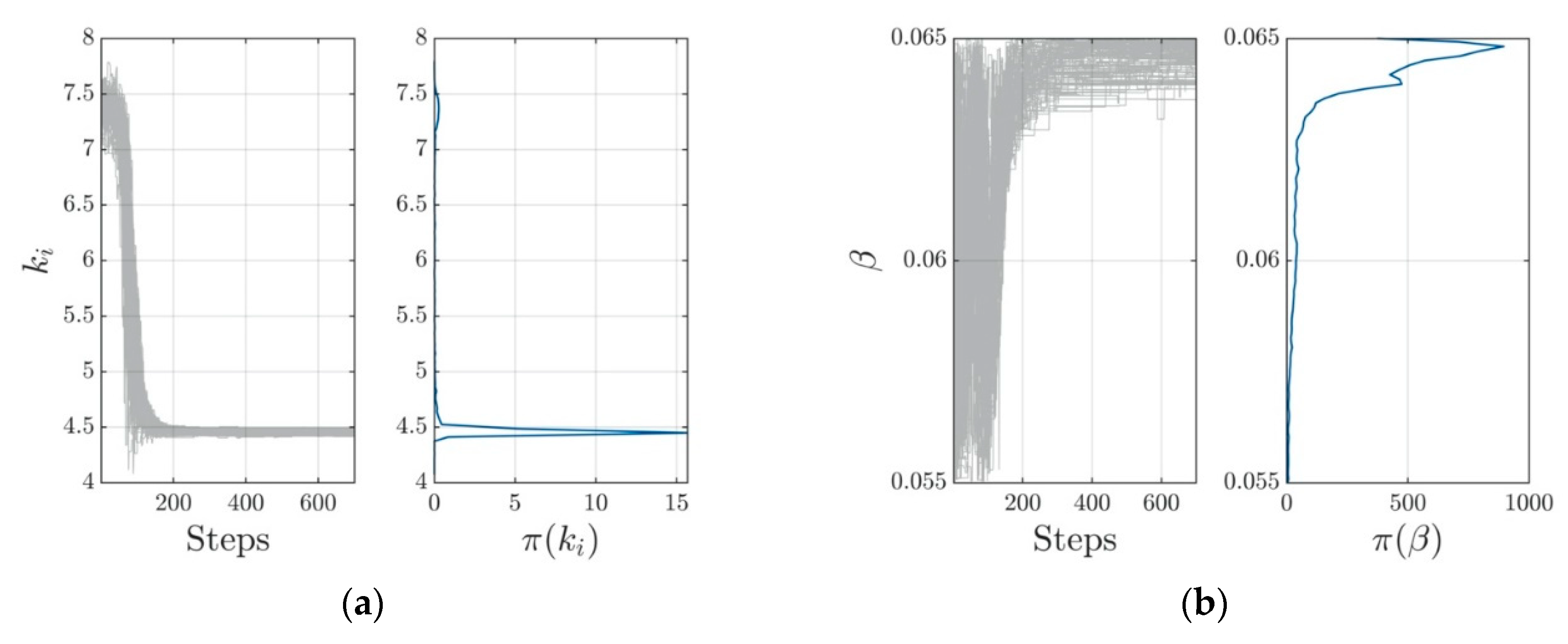
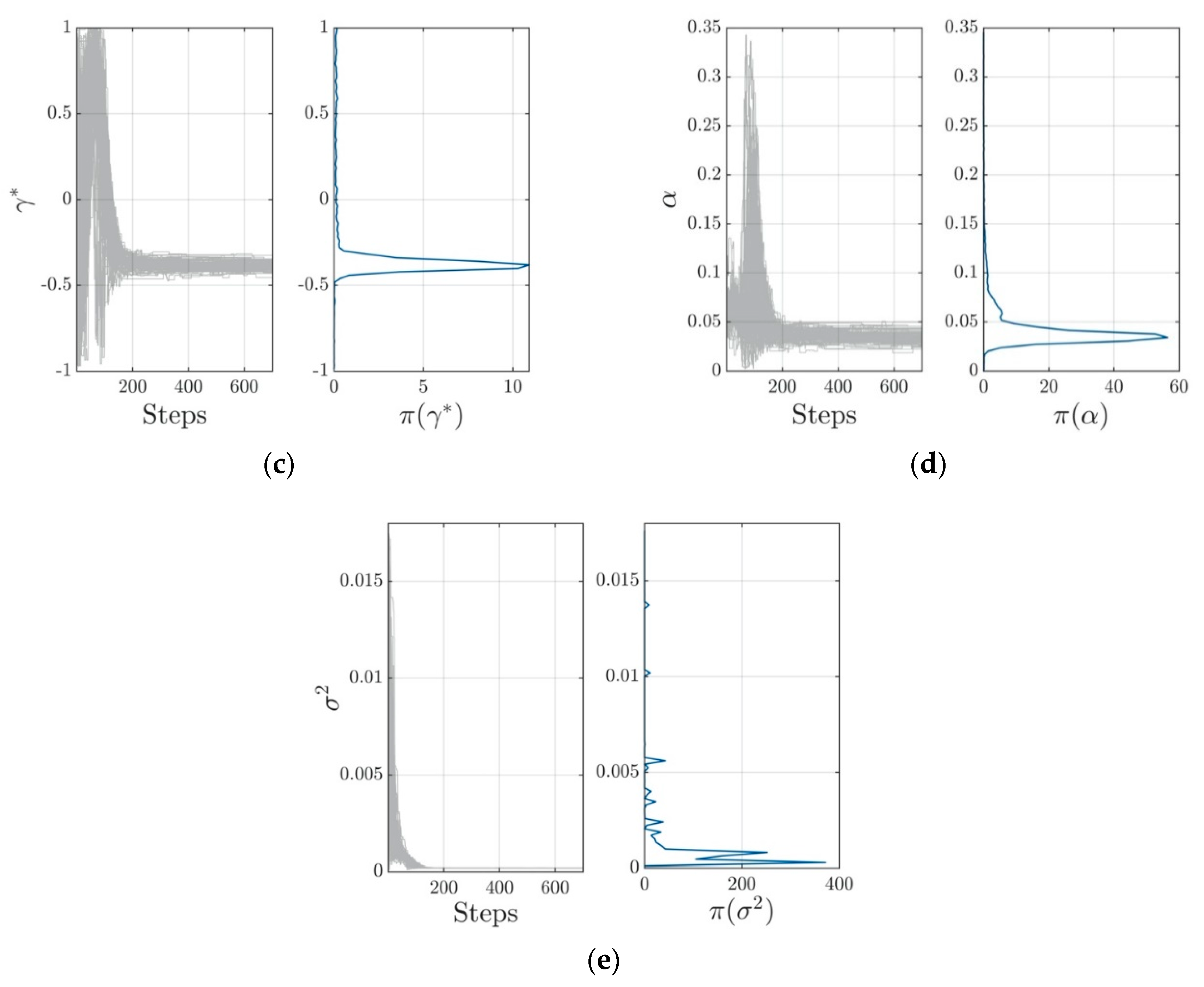
The evolutions of the Markov chains are plotted instead in
Figure 5 for each model parameter
. These give valuable insights about convergence of the chains. Indeed, it can be clearly seen that 700 steps are sufficient to reach the steady state. Consequently, samples generated by the chains follow the posterior distributions. However, the sample points generated by the AIES MCMC algorithm have been post-processed carrying out the burn-in of the first half of sample points before convergence to avoid the pollution of the estimate of posterior properties. In our case, the quality of the generated MCMC chains can be judged satisfactory.
Table 3 reports the result of the Bayesian inversion analysis: mean and standard deviation of the posterior 5%–95% quantiles of the distribution and Maximum A Posteriori (MAP) point estimate. The MAP can be assumed as the most probable parameter value following calibration. This value has been used as a best-fit parameter.
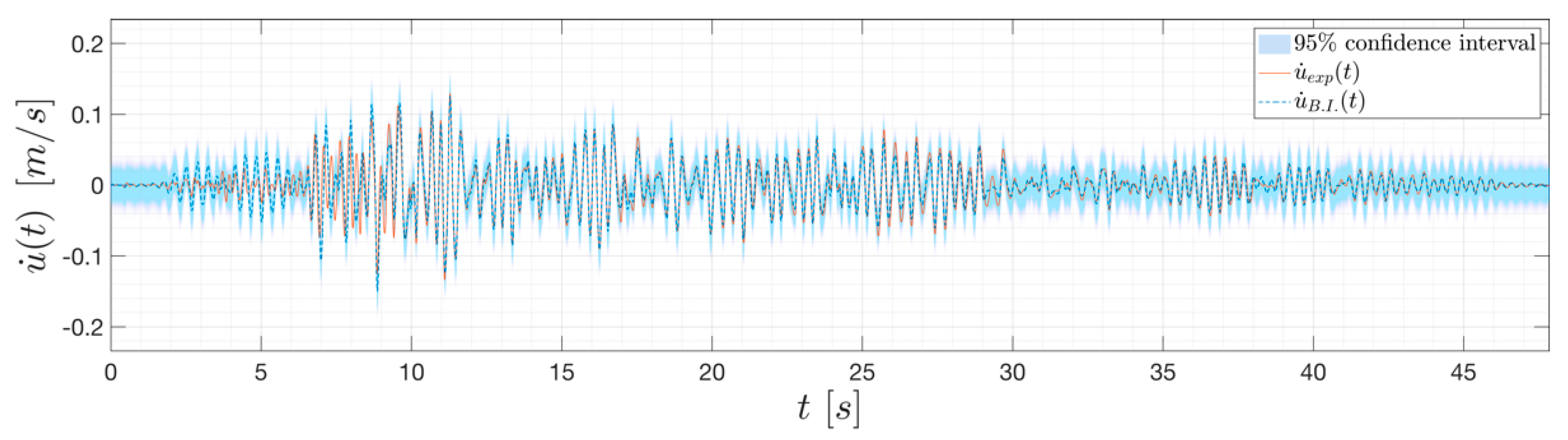
The model response prediction using MAP as a point estimate of the posterior distributions is plotted in
Figure 6. It can be clearly seen how the inferred response reproduces the experimental record quite accurately, with a mean square error (MSE) over the time of 2.007 × 10
−4 (i.e., half of the average of the MSE computed on all the post-predictive model runs, MSE = 4.0415 × 10
−4). In fact, we should not dwell on this specific prediction; rather, we should consider its confidence intervals. The latter tells us how uncertainties on model input propagate through the model.
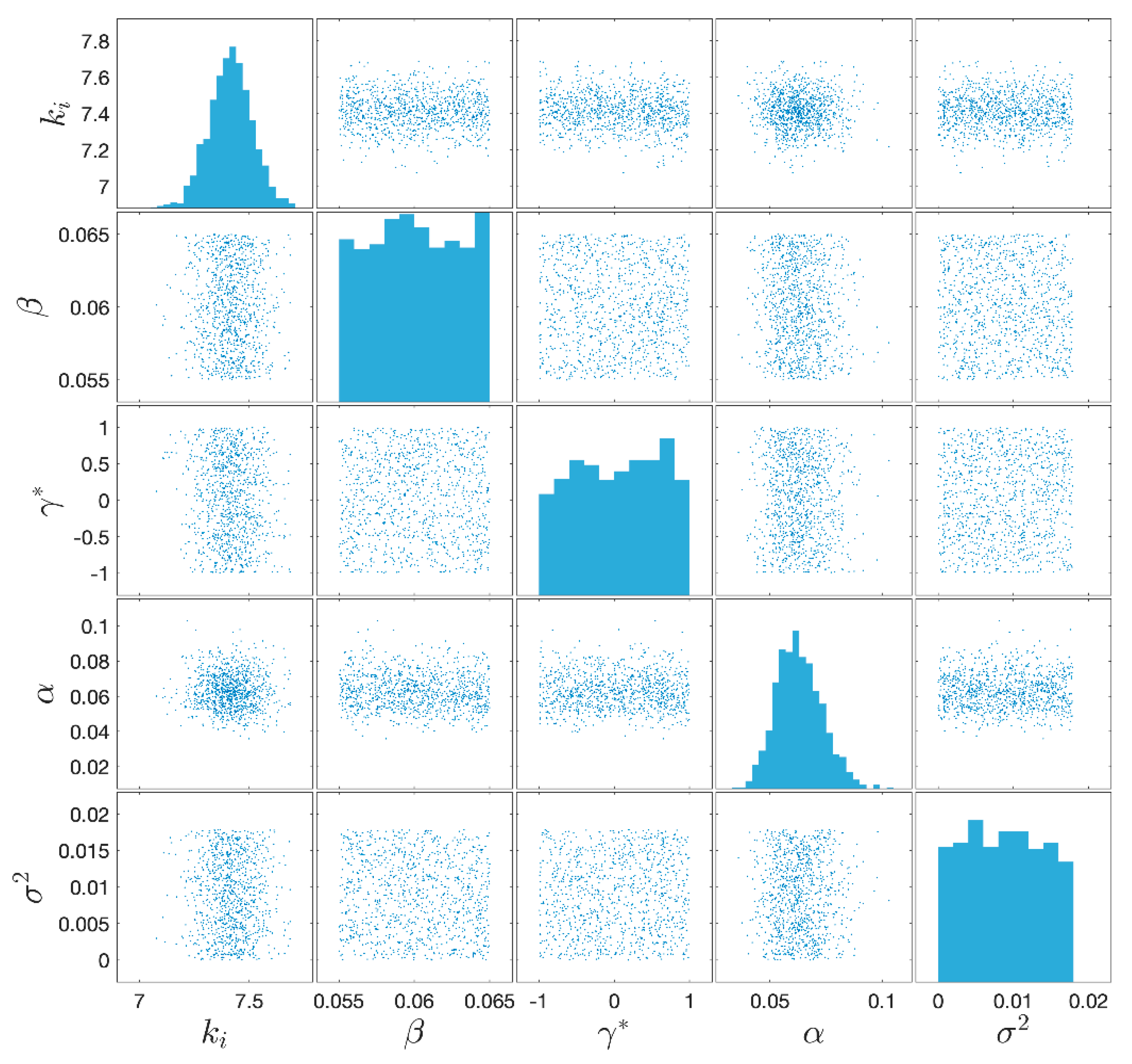
From inspection of
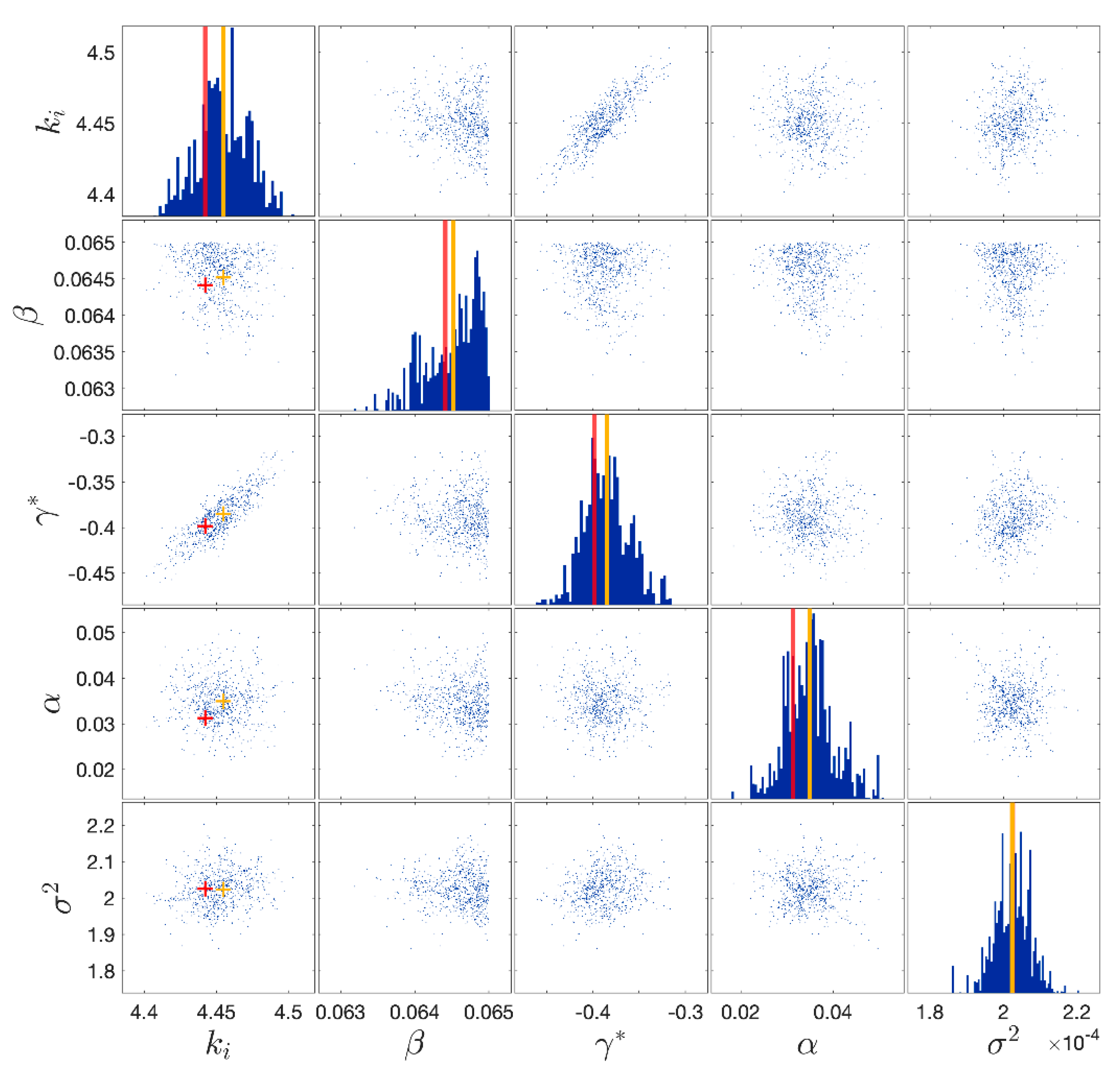
Figure 6 it can be concluded that uncertainties on the input parameters produce higher uncertainty of the response prediction in the lower amplitude regions rather than in the peak values. However, this is a satisfying result in earthquake engineering, where one is more interested in predicting maximum response quantities. The posterior distributions of the calibrated parameter are plotted in
Figure 7.
3.2. Demonstration on a Case Study
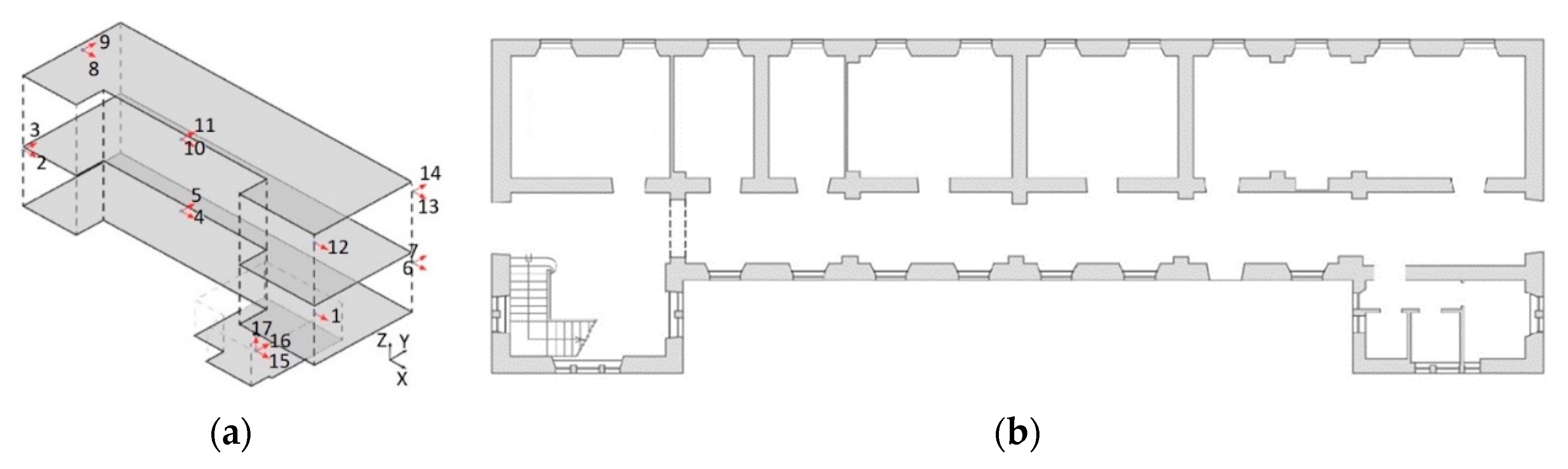
Having established that the UQ framework can significantly help to gain insight into the uncertainties intrinsic to calibration, thus furnishing a realistic level of confidence on model prediction, this can now be applied to a case study. The aim is to study how the UQ works with an identified hysteretic and degrading model that emulates the experimental response of a real monitored masonry building, the Town Hall of Pizzoli, subjected to its real earthquake recorded data. This is a three-story stone masonry building located northwest of the city of L’Aquila (Abruzzo), which is away from the city. It was built around 1920 and it formerly hosted a school. The structure presents a u-shaped regular plan mainly distributed along one direction, and its elevations are characterized by regular openings distributed along three levels above the ground (the raised ground floor, the first floor and the under-roof floor). The total area is about 770 m
2 while the volume is about 5000 m
3.
Figure 8 reports the schematizations of the analyzed building. The Town Hall of Pizzoli belongs to the network of buildings monitored by OSS [
26]. The OSS monitors the structure of Pizzoli thanks to a dynamic monitoring system composed of eight accelerometers installed on the building and one placed in the basement. More specifically, a tri-axial accelerometer to record the seismic input in the three space directions is fixed in the basement. On the raised ground floor, no accelerometers are present. On the first floor, three biaxial accelerometers and one monoaxial accelerometer (in X direction) are present to capture the acceleration responses of the first floor in the two horizontal directions. Finally, the same scheme of sensors installed on the first floor is present on the second floor. It is worth noting that the acquisition system and the sensors setup was designed by OSS and represents an input data for our analyses. In this regard, to obtain an optimal positioning of the sensors, a finite element model should be used. In particular, the optimal sensor placement is done recurring to a linear finite element model (using eigen-analysis, singular value decomposition, etc.). The model is often linear to perform this task because for nonlinear analysis the linear elastic component commonly brings the predominant amount of the output variance.
The system sampled the signals at 250 Hz, for a total duration of about 50 s for the analyzed earthquake. The acquisition system recorded the sequence that struck central Italy in 2016. For this study, the earthquake acceleration responses of the building recorded on 30 October 2016 were used as reference signals. It is worth noting that accelerometric data are used in this work to define the likelihood function during the calibration. This is true as the use of inter-storey drift in the definition of the likelihood function would require its estimation. This estimate is often complicated because the filtering and integration operation on experimental data usually brings errors during the elaboration, especially with respect to the time alignment of two different recorded signals (quantities that are needed to estimate the inter-storey drift).
Since the scope of this study is to show how the discrepancy of models affects the calibration of model parameters value for seismic SHM, only the inter-storey response of the under-roof floor (2nd DoF) has been considered as reference output quantity. The acceleration of the first floor (1st DoF) is considered as the input signal of the reference model. The decision to use an inter-storey law is based on the fact that the results of the calibration will be compared with the results of calibration performed with discrepant models. In this sense, a single DoF model helps to make a direct comparison of the results, since the correspondence of parameters belonging to different models becomes less obvious for multi DoF models. The idea is to present a numerical case study derived from a real-world structure, with realistic values for hysteretic model parameters.
3.2.1. Reference Model
In this subsection, the model that came as the result of a nonlinear identification previously performed on the Pizzoli Town Hall structure is described for completeness. The nonlinear identification, like in [
41,
42], relied on a plane frame model in the direction of minor inertia of the building. Assuming the mass contribution of the raised ground floor in the dynamics of the structure is negligible, the building has been modelled with two lumped masses in correspondence to the first and under-roof floor.
The identification procedure consisted of using absolute acceleration data measured at the floors to approximate the response with a generalized linear model obtained by expanding the Bouc–Wen model of hysteresis.
The basic functions of the generalized linear model ended up being nonlinear in terms of the exponential parameters of the BW model. These parameters were therefore identified with specialized optimization algorithms, while for the remaining parameters a direct estimate in the joint time-frequency domain was performed. The identification provided also instantaneous values of the BW model parameters made explicit by the generalized linear model. The main findings of the identification can be summarized as follow:
The adopted procedure allowed verification of the consistency of the assumed nonlinear model. This was done by checking the stability of the values of the model parameters over time.
The resulting model satisfactorily reproduced the experimental response. This was validated in [
43] by comparing the model results with the experimental findings obtained by the authors and by other researchers [
44] independently,
The procedure allowed for the collection of timely information on the health of the structure immediately after the occurrence of the earthquake.
In the identification process, a global box-like behavior was assumed, also based on the results of on-site inspections that led to the verification of the existence of good connections between walls and floor-walls before the occurrence of seismic events. In addition, no strength deterioration was accounted for (i.e.,
), while for the stiffness degradation, only the proportional component was maintained (i.e.,
and
. The parameter
α was instead imposed to zero. These choices were made to make the reference model consistent with the model identified in [
43], which was calibrated with experimental data.
The reference two DoFs model has been reconducted to a DoF by imposing the acceleration response of the first floor of the Town Hall (recorded by the monitoring system),
, as the input signal. The output was obtained for the inter-story drift,
, between the under-roof and the first floor. For further information on the identified model one can refer to [
43].
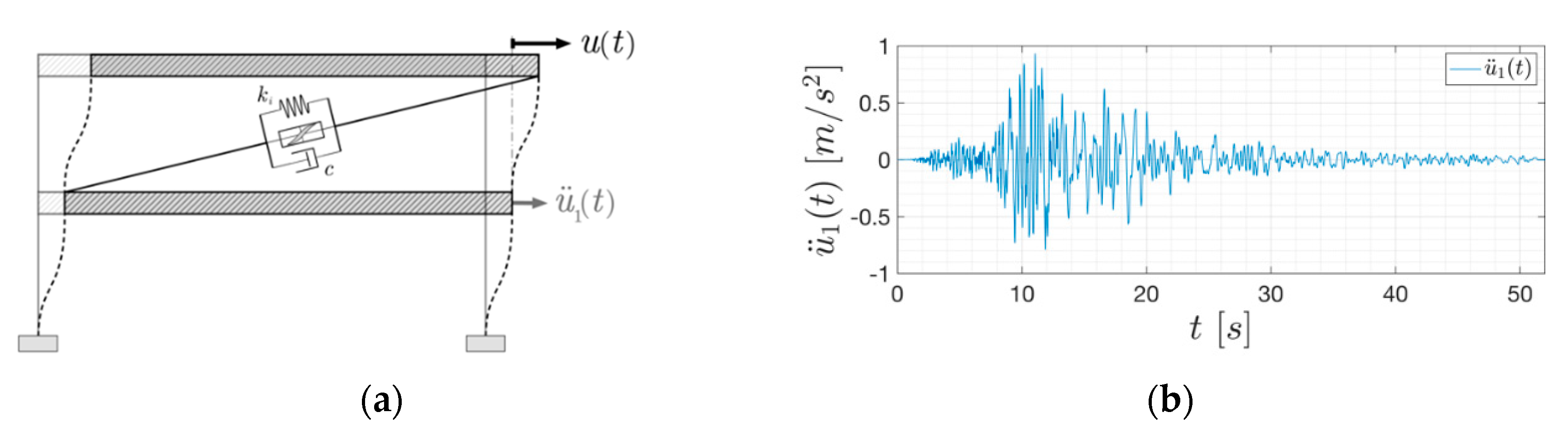
Thus, the reference model used for the analysis from now on becomes:
The reference model is depicted in
Figure 9 with the acceleration input
, while the corresponding model parameters, identified in a previous study with the Pizzoli Town Hall building responses, are reported in
Table 4. For the numerical simulations, a viscous damping term (with a damping ratio of 3% set as a deterministic value in the calibration process) has been added to the model of Equation (16).
3.2.2. Bayesian Calibration of the Reduced Single DoF Reference Model
The reduced single DoF BWBN model was used to validate the entire procedure in the first phase.
Table 5 and
Table 6 report the prior information on model parameters and the results of the Bayesian inversion, respectively.
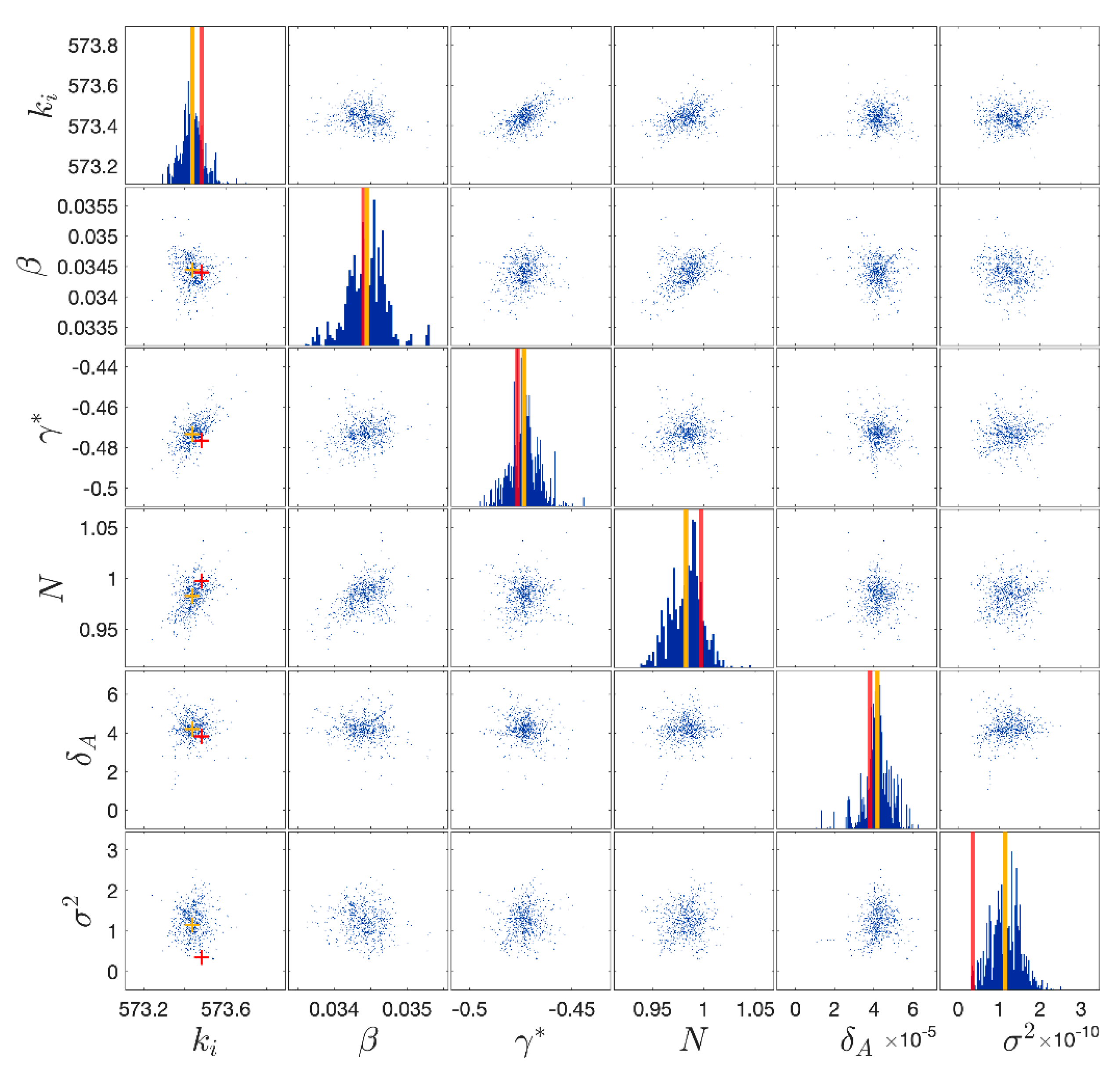
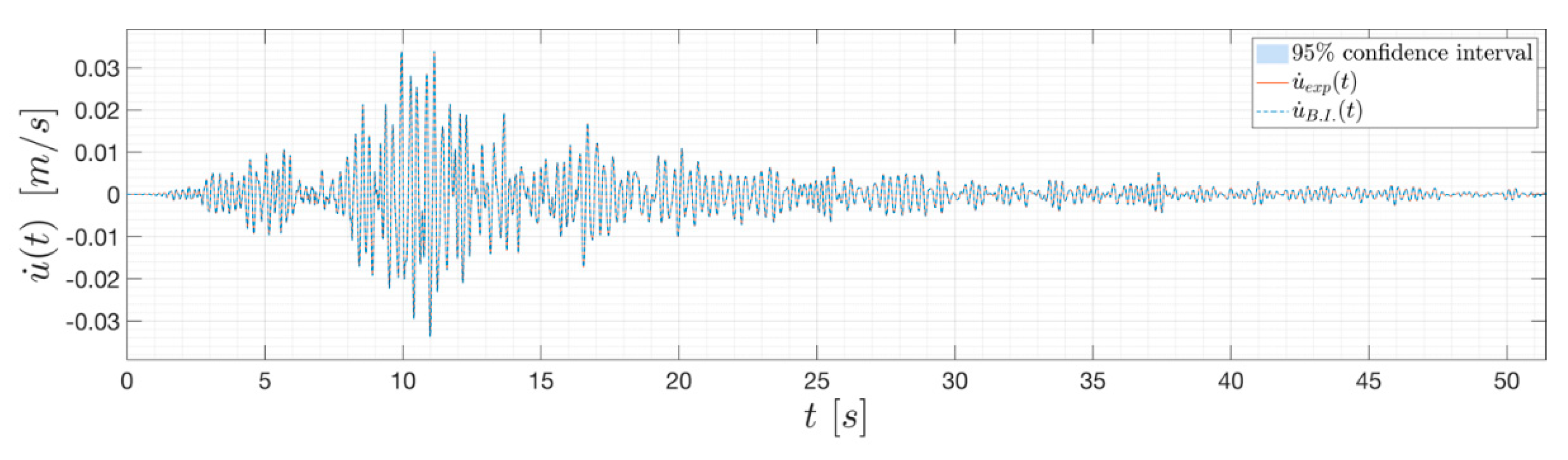
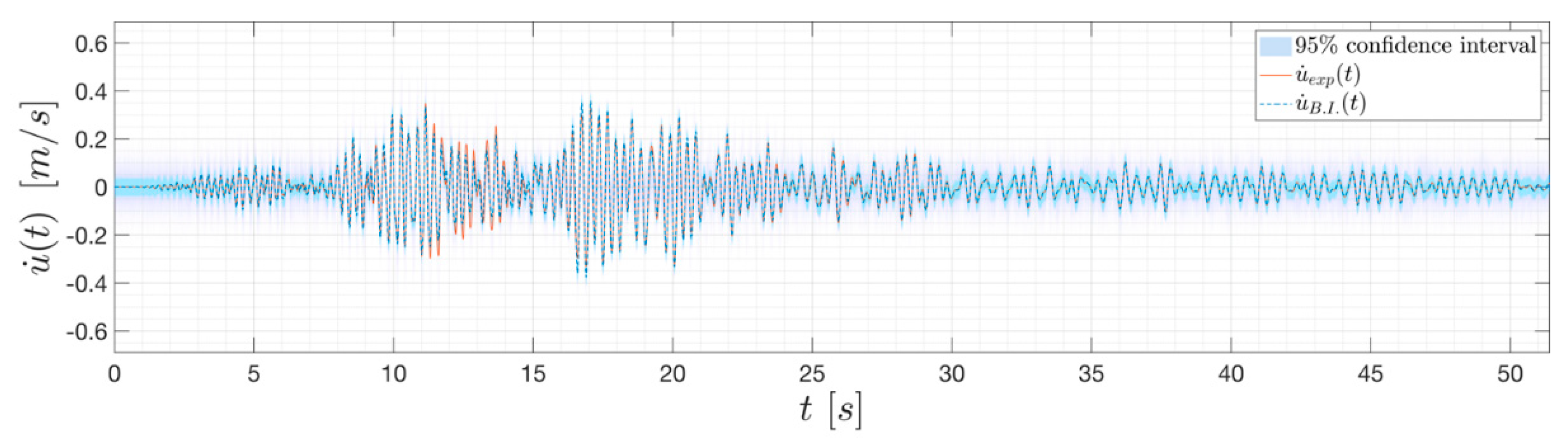
Figure 10 depicts the posterior distributions of the parameters, while
Figure 11 depicts the velocity response of the oscillator once the model has been calibrated. From the inspection of the latter, it can be concluded that uncertainties on the input parameters do not affect the response prediction.
Moreover, the value of the degrading term
turns out not to influence the response prediction. This is due to the fact that during the earthquake shaking (PGA
1 m/s
2) the structure exhibited a low level of damage [
44].
Both parametric and non-parametric degradation models have been used herein. Two models per each family are first mathematically introduced, then insights into the accuracy afforded by each model are provided.
3.2.3. Models for Stiffness Degradation
Besides the original BWBN degrading model, an additional parametric model is now introduced to investigate the capability of the Gaussian model discrepancy term to cover model uncertainty. An important part of the current literature on damage indices focuses on exponential function of the dissipated energy.
Consequently, an energy-based exponential function, according to [
45], has been used in this work to replace the original BWBN stiffness degradation term
that multiplies the initial stiffness
:
where
is an additional parameter to infer jointly with
. In order to replicate the degrading effect on the initial stiffness
through non-parametric models, probability distribution functions have been used herein. First, according to the procedure used in [
46], a Weibull distribution function was adopted:
where
are the distribution parameters to infer jointly with
. Meaning to these parameters may be given as follows:
represents the instant of time at which there is loss of stiffness;
controls its rate; and
RW controls the amount of damage. Secondly, a logistic distribution function was adopted:
In this case, parameter is the instant of time in which the loss of stiffness occurs, while parameter represents its rate, and RL defines the amount of degradation.
3.2.4. Comparison of the Calibrated Models
It is useful to make a comparison among all the models introduced to get insights on their accuracy in predicting the response of the oscillator. For the sake of simplicity, from now
Model 1,
Model 2,
Model 3 and
Model 4 will refer to the models with the degrading law of the original BWBN model, the exponential law, the Weibull and the logistic distribution functions, respectively. It is also worth noticing that, in order to reduce the number of parameters to infer, only the initial stiffness
and the degrading term have been involved in the calibration process. This can be easily justified by the fact that, for practical earthquake engineering applications, the focus relies on the quantification of the structure’s stiffness and its drop (especially for masonry structures which are prone to crack during a seismic event). Prior information on the possible value of the model parameters was obtained by visual inspection of the dissipated energy versus time curve. For both parametric and non-parametric models, the velocity response of the system obtained was almost identical to
Figure 11 for a low-level of degradation.
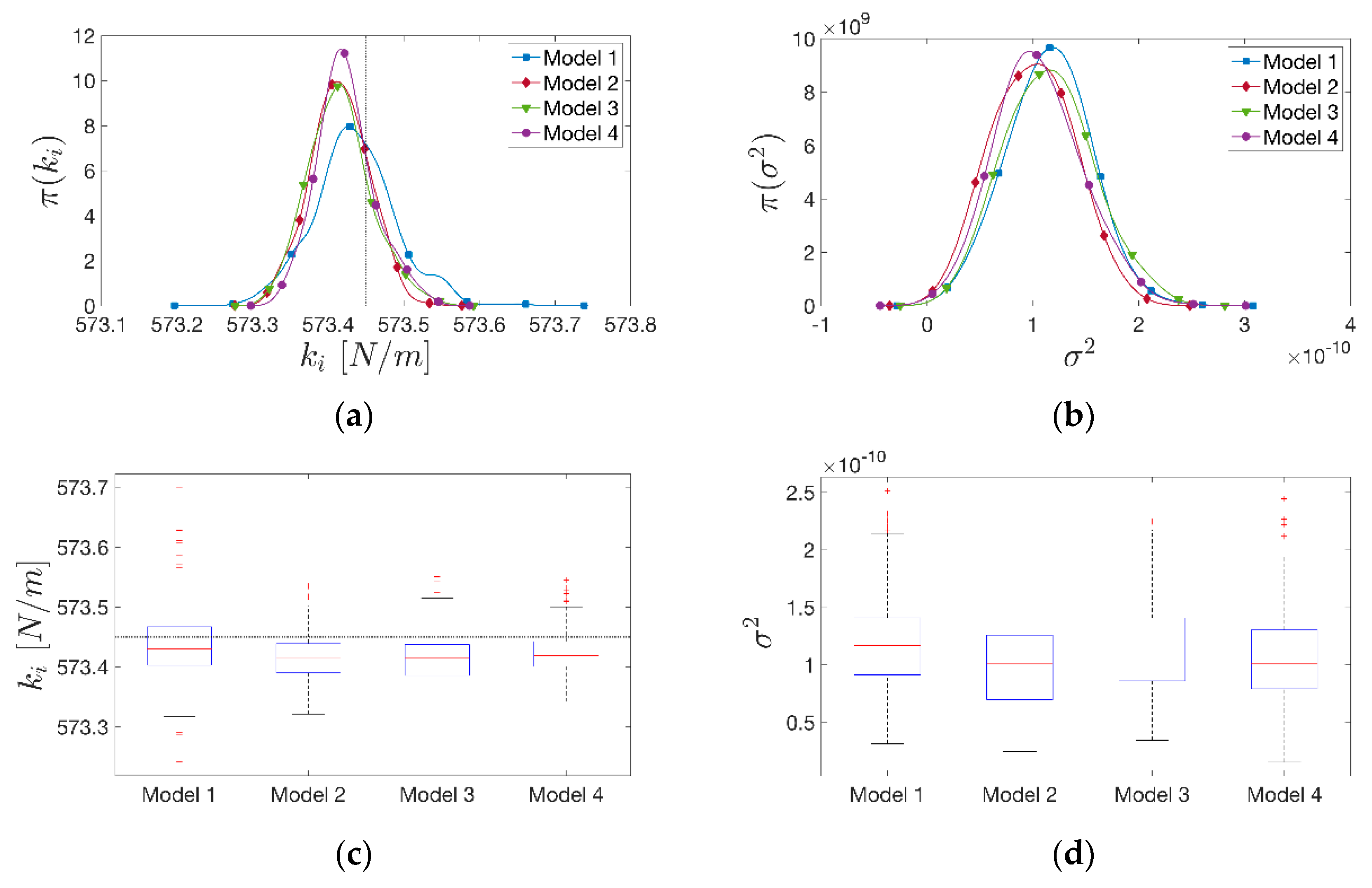
Figure 12 depicts the posterior distributions of the initial stiffness parameter
for each model considered. From this inspection, it can be seen that all models were able to predict the correct value of the initial stiffness. The choice of the MAP (or of the mean of the distributions) as a point estimate after the uncertainty propagation led to a slightly underrated initial stiffness regardless of the model adopted. However, this is neglectable from an engineering point of view. Moreover,
Figure 12 depicts the distributions of the discrepancy variance term
as well. All the models share the same order of magnitude for
and, more or less, the same variance. This can be read as follows: the adopted Gaussian discrepancy term, with mean null and unknown variance, performs as a good function to embody all the model errors arising. Thus, at the end, it appears clear how the choice of the model used to infer the stiffness of the oscillator is not meaningful in the presence of a low-level of damage.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}