
Is Markerless More or Less? Comparing a Smartphone Computer Vision Method for Equine Lameness Assessment to Multi-Camera Motion Capture

 , , ,
, , ,
Abstract
:Simple Summary
Abstract
1. Introduction
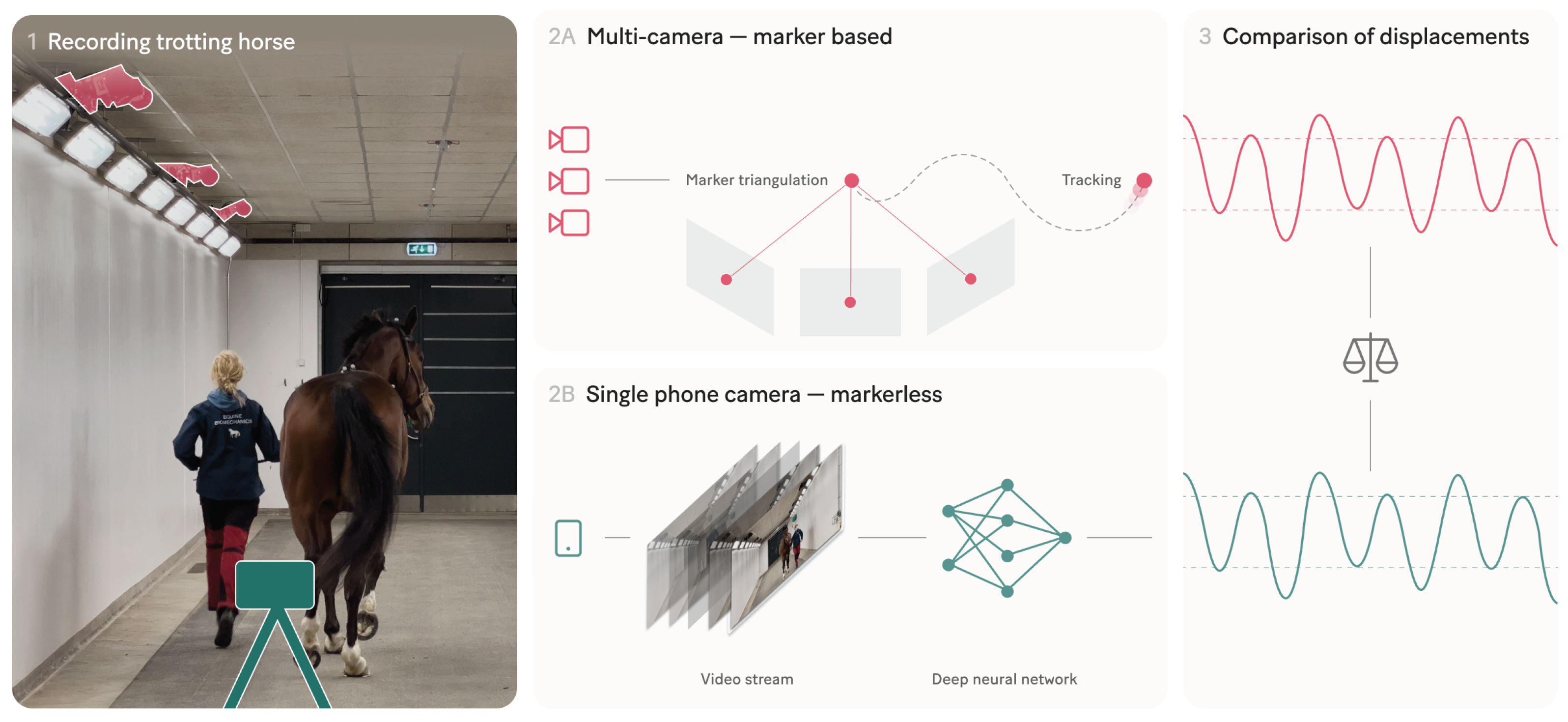
2. Materials and Methods
2.1. Study Protocol
2.2. Data Collection
2.3. Signal Extraction
2.4. Stride Split and Signal Filtering
2.5. Signal Synchronization
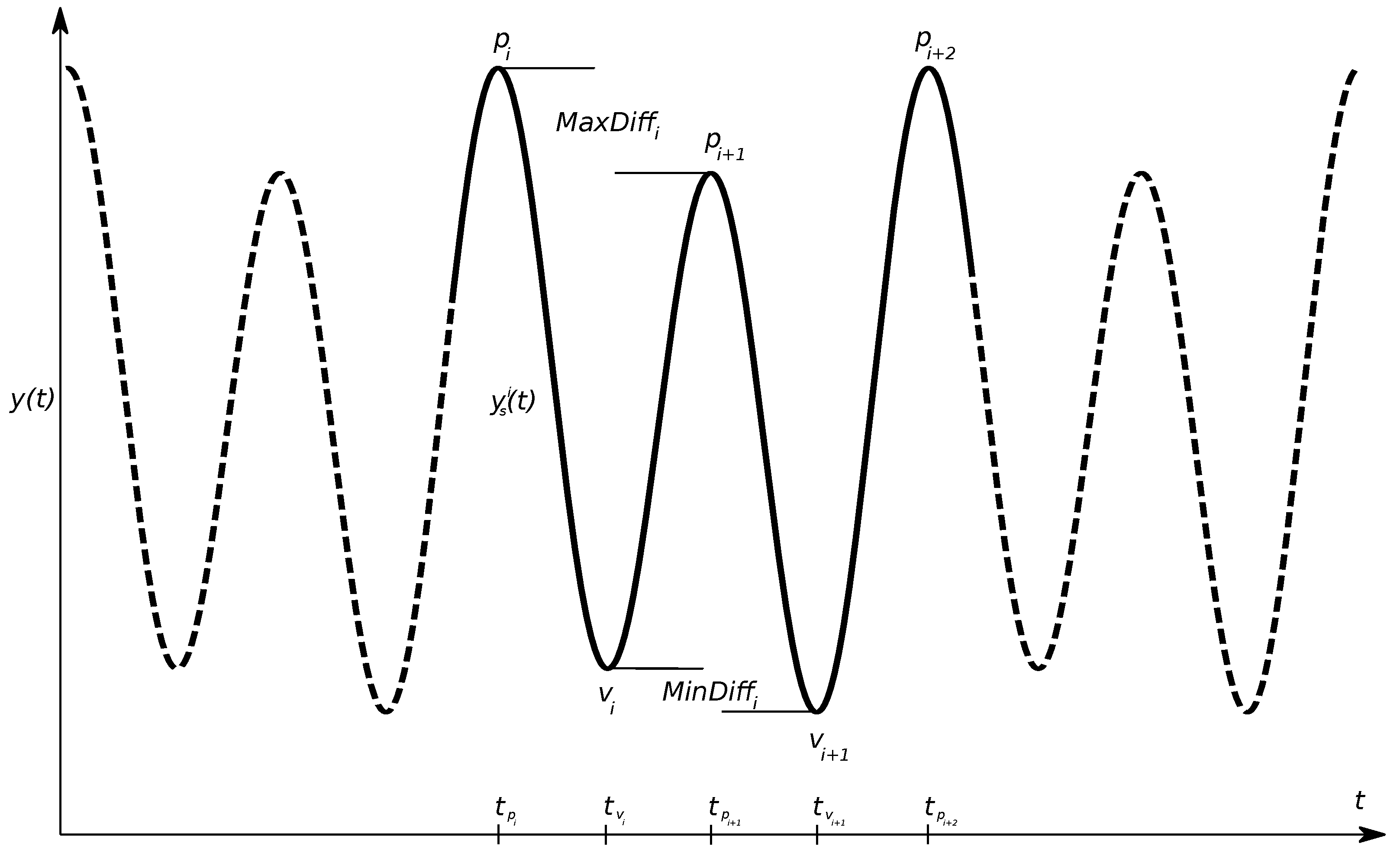
2.6. Asymmetry Quantification
2.6.1. Extraction of Valleys and Peaks
2.6.2. Normalised Differences for Valleys and Peaks
2.6.3. Outlier Removal
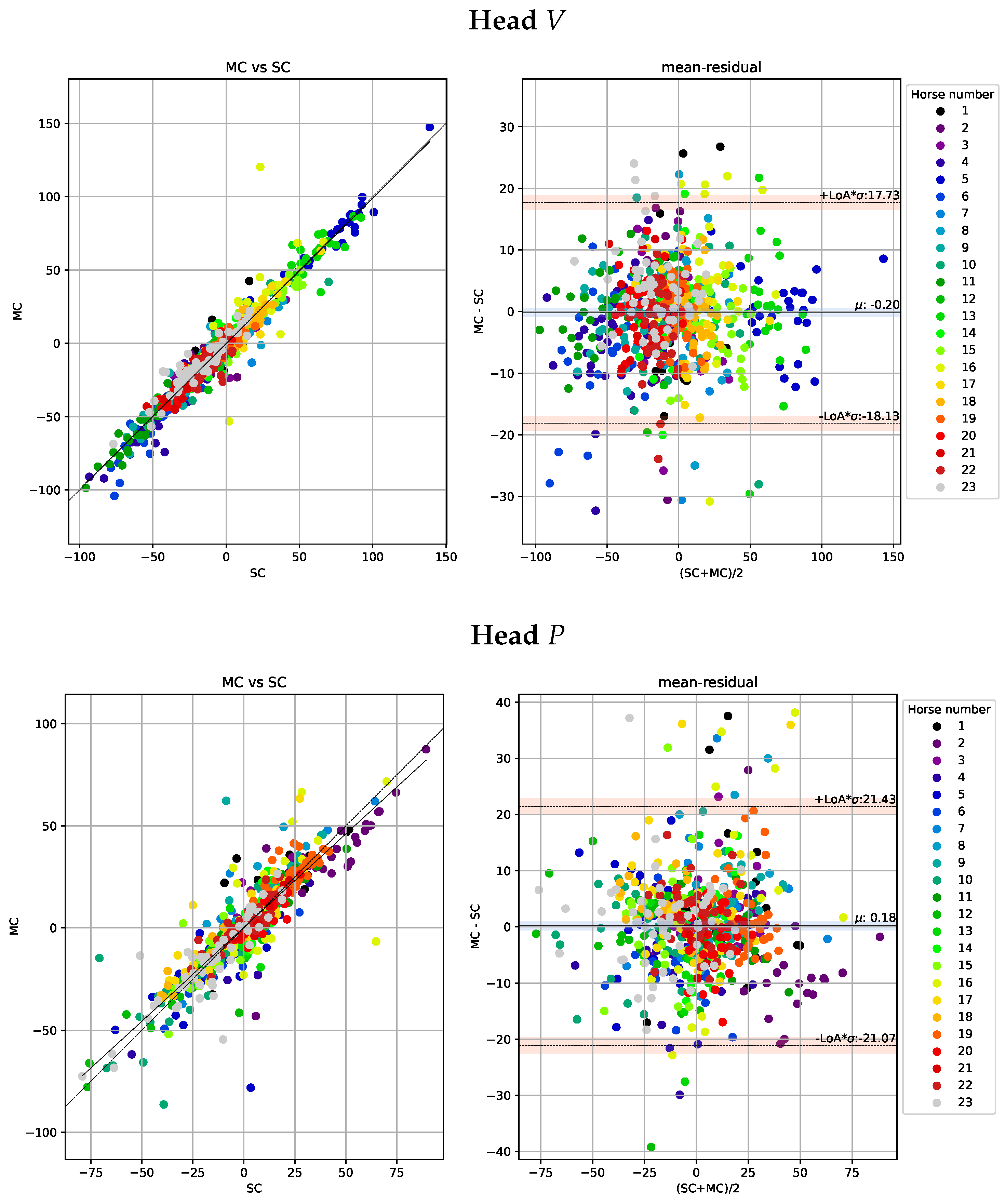
2.7. System Comparisons
2.7.1. Comparison Metrics
2.7.2. Statistical Analysis
3. Results
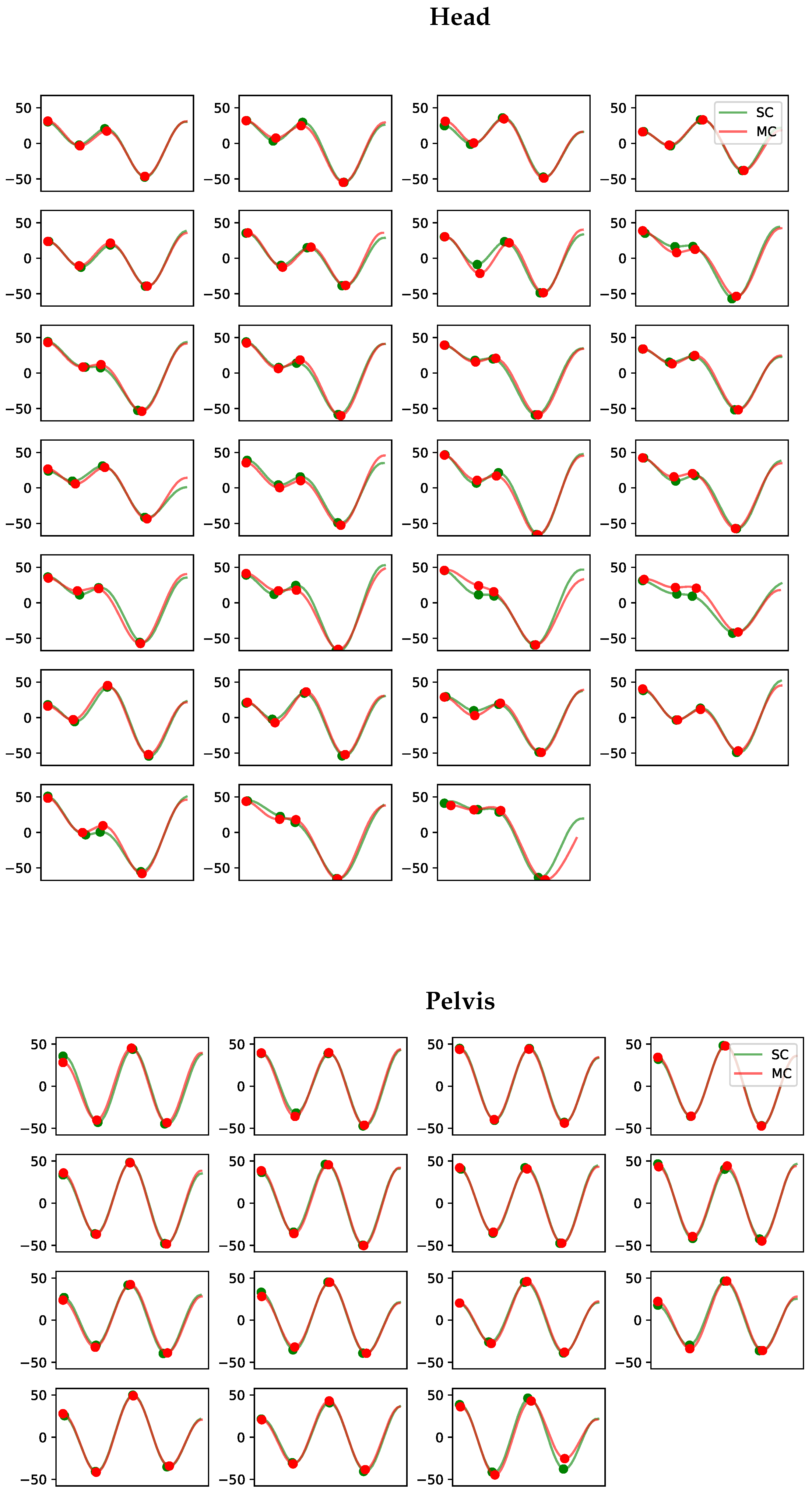
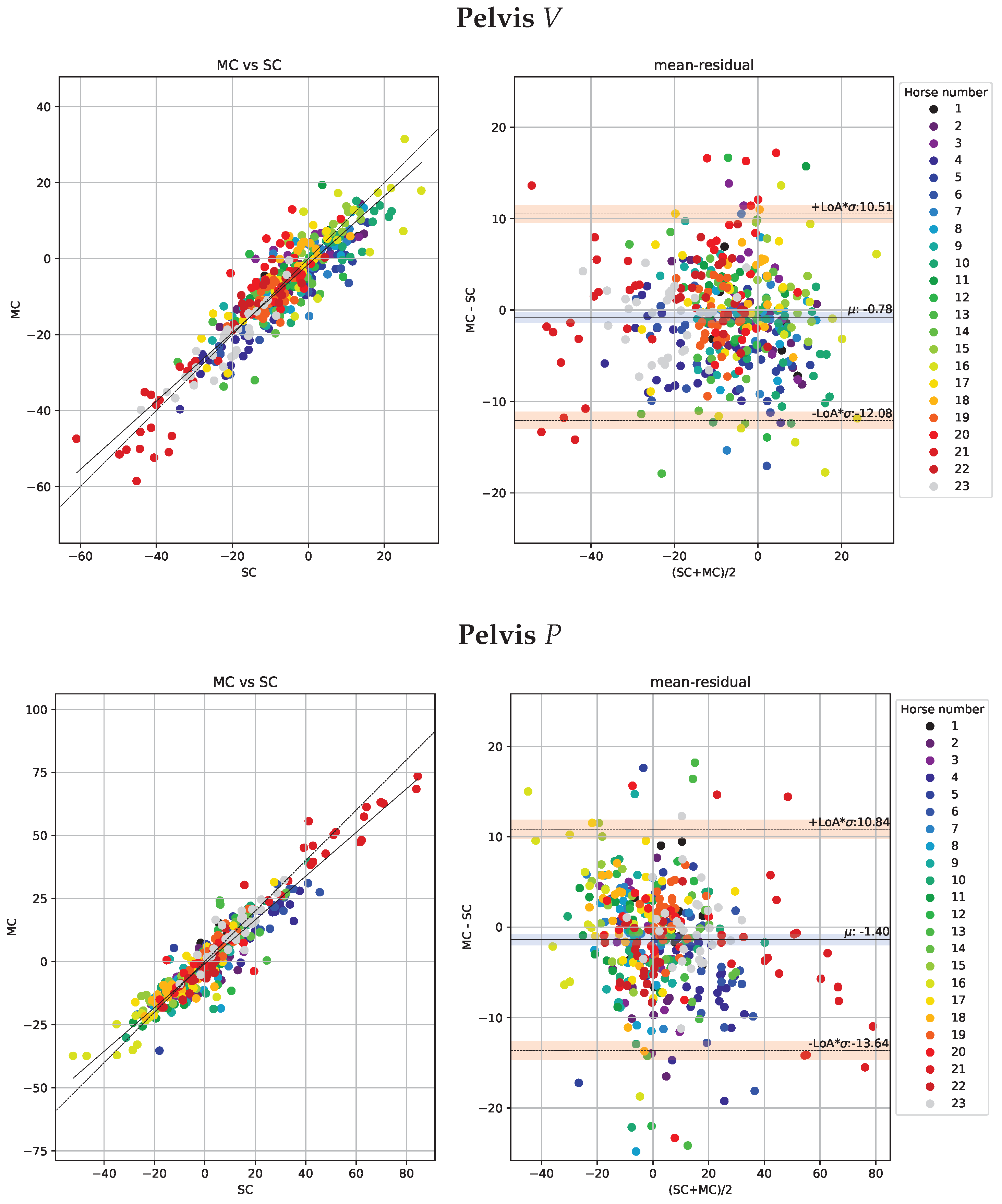
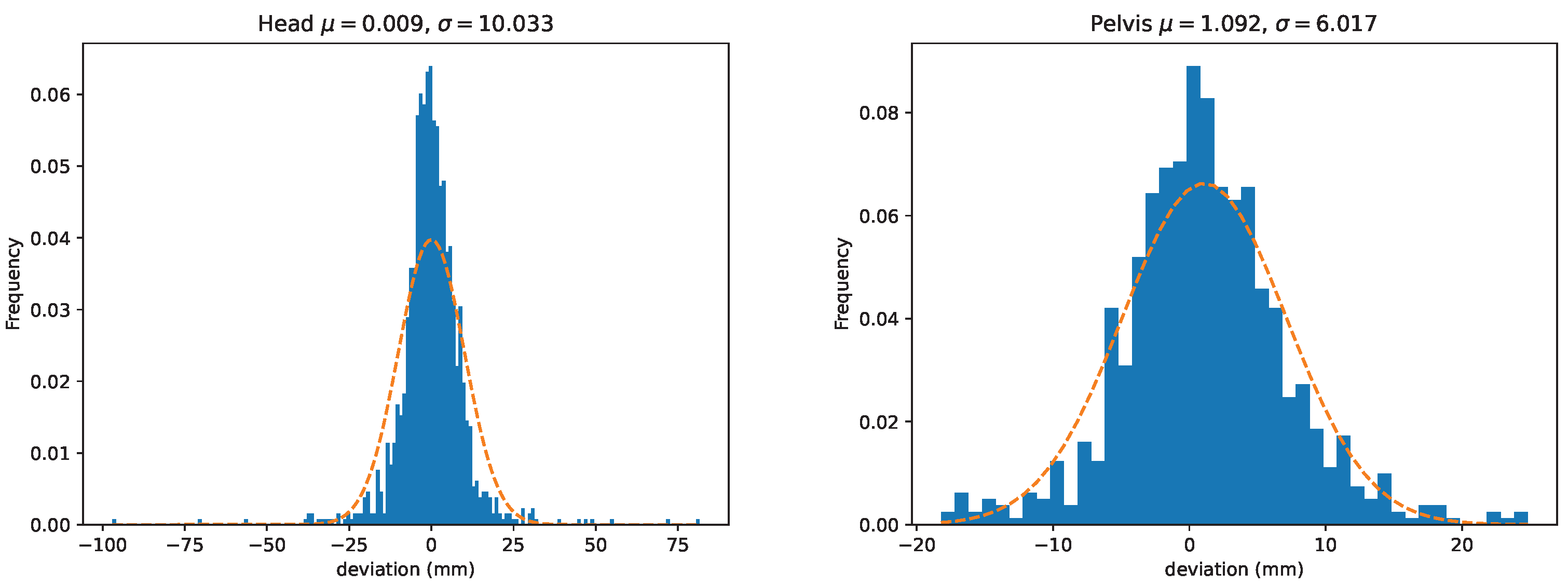
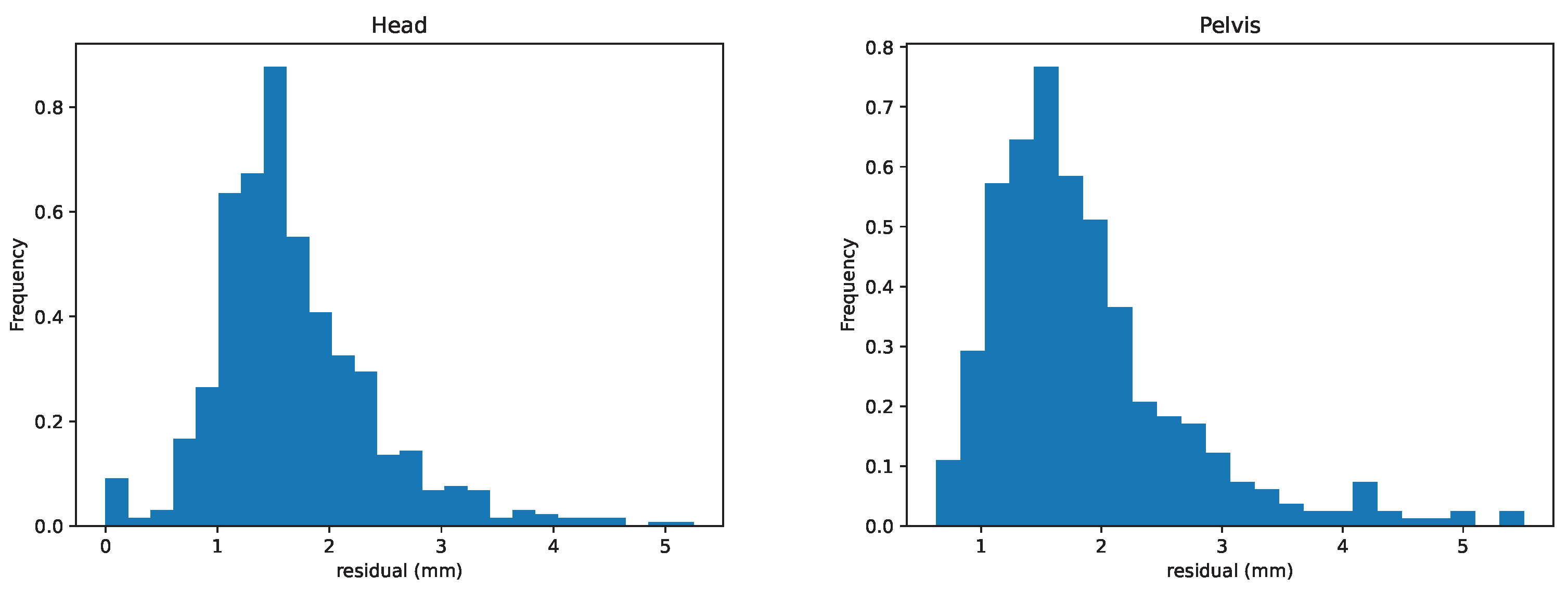
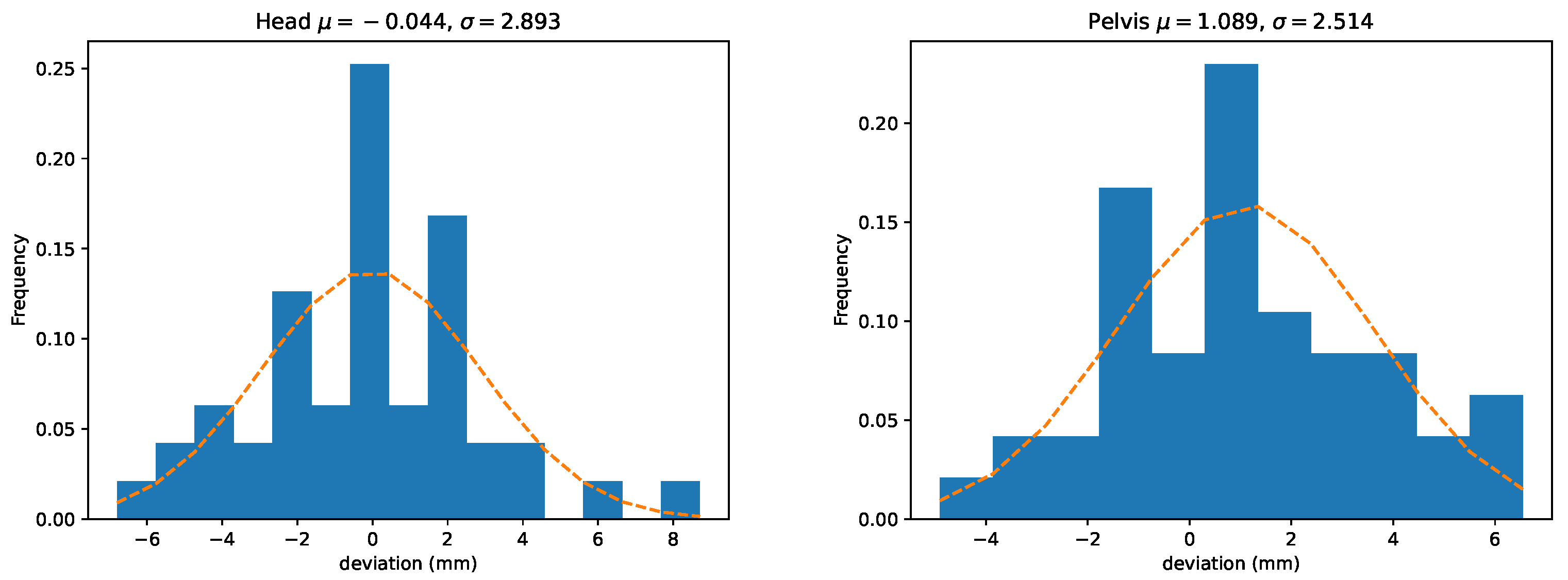
3.1. Per-Stride Comparisons
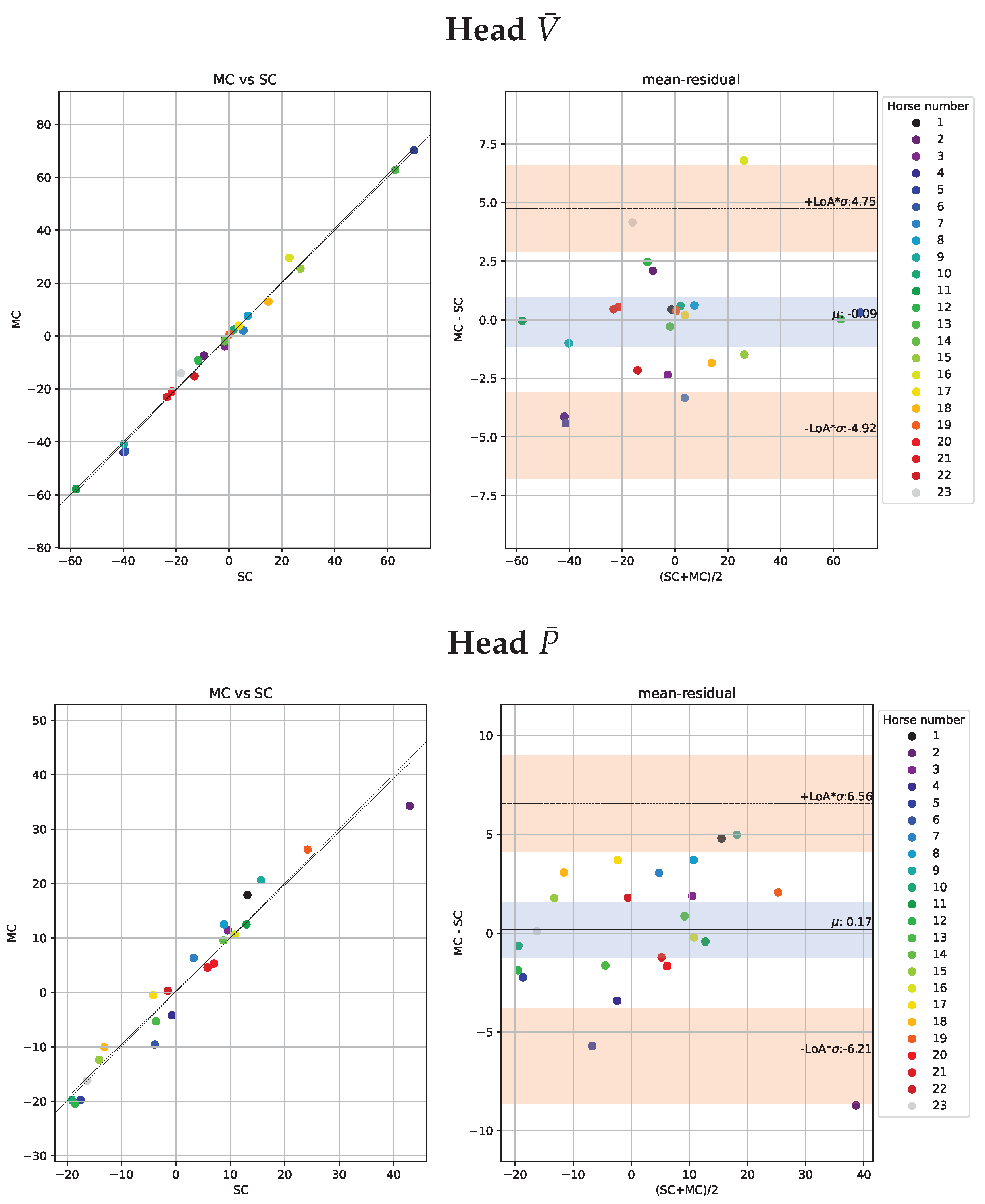
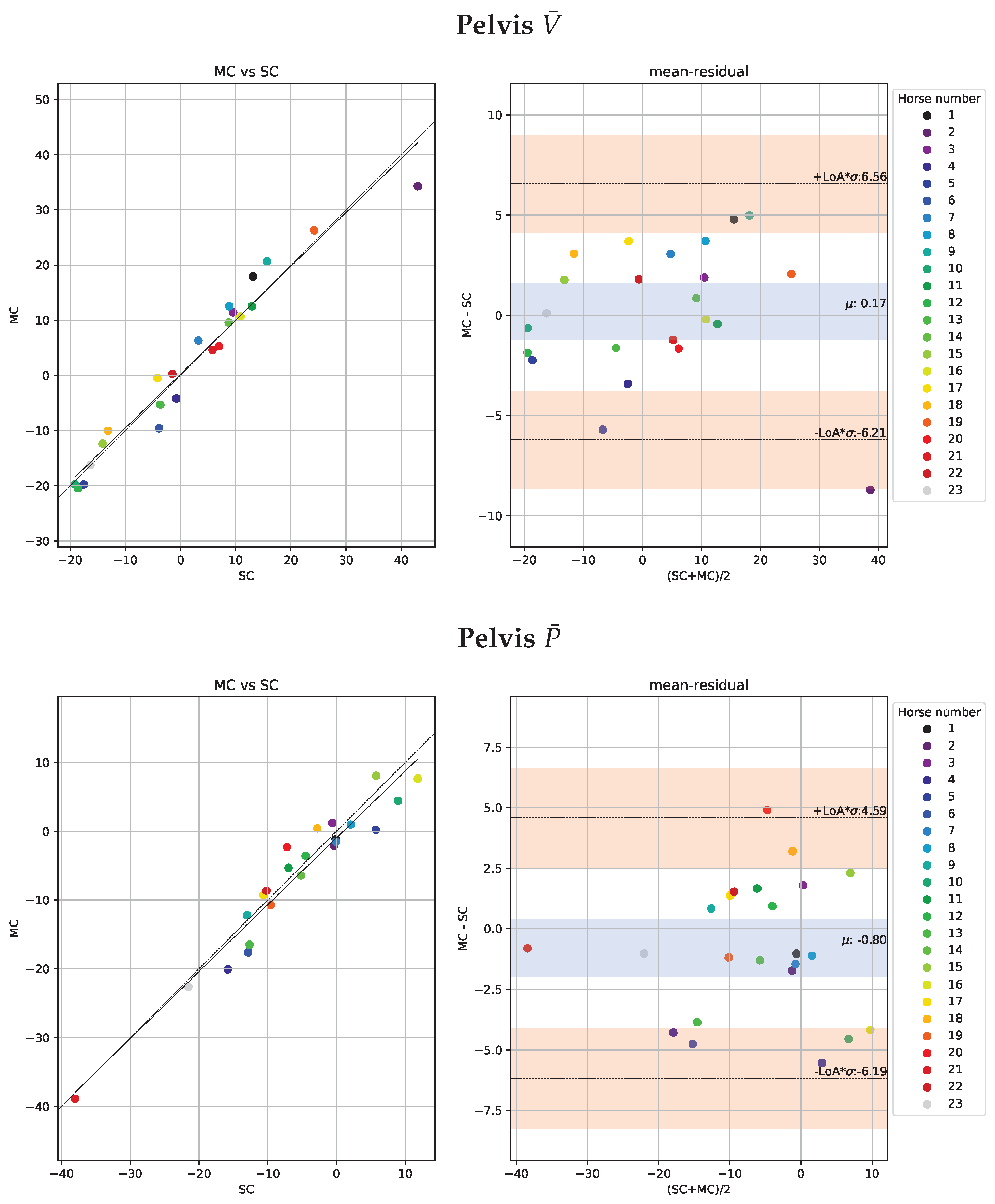
3.2. Per-Trial Comparisons
4. Discussion
Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| SC | Single-camera markerless system |
| MC | Multi-camera marker-based system |
| VDS | Vertical displacement signal |
| NEVd | Normalised extreme value differences |
| MaxDiff | Difference between local maxima values within a stride |
| MinDiff | Difference between local minima within a stride |
| P | Normalised difference between local maxima values of the VDS per stride |
| V | Normalised difference between local minima values of the VDS per stride |
| Trial mean P | |
| Trial mean V | |
| P | Trial standard deviation of P |
| V | Trial standard deviation of V |
| Deviation between two corresponding P’s from different systems | |
| Deviation between two corresponding V’s from different systems | |
| Deviation between two corresponding ’s from different systems | |
| Deviation between two corresponding ’s from different systems | |
| Mean absolute deviation over dataset | |
| Maximum absolute deviation over dataset | |
| Minimum absolute deviation over dataset | |
| R | Range of motion of the VDS per stride |
| Linear Discriminant Analysis | |
| Limit of Agreement |
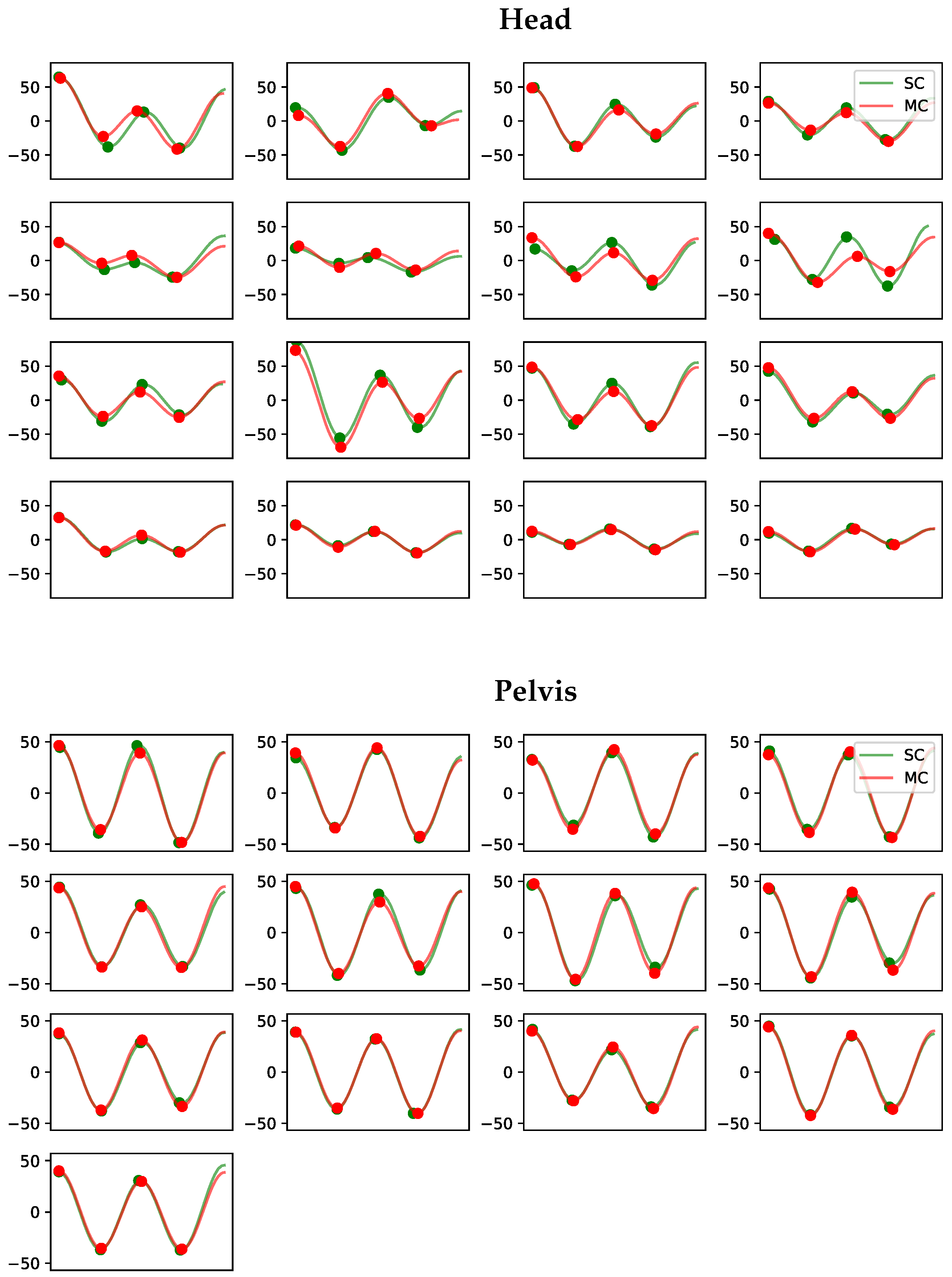
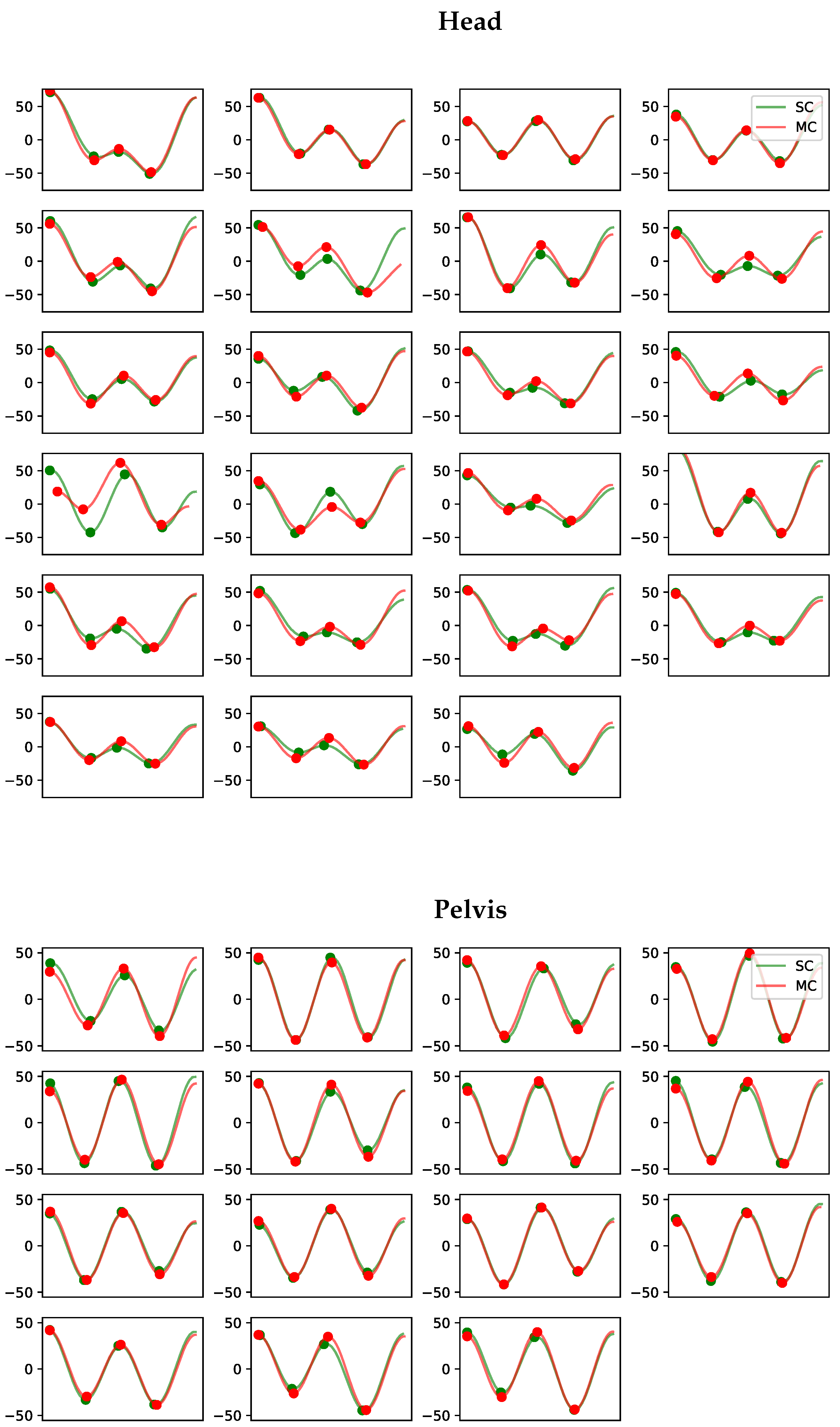
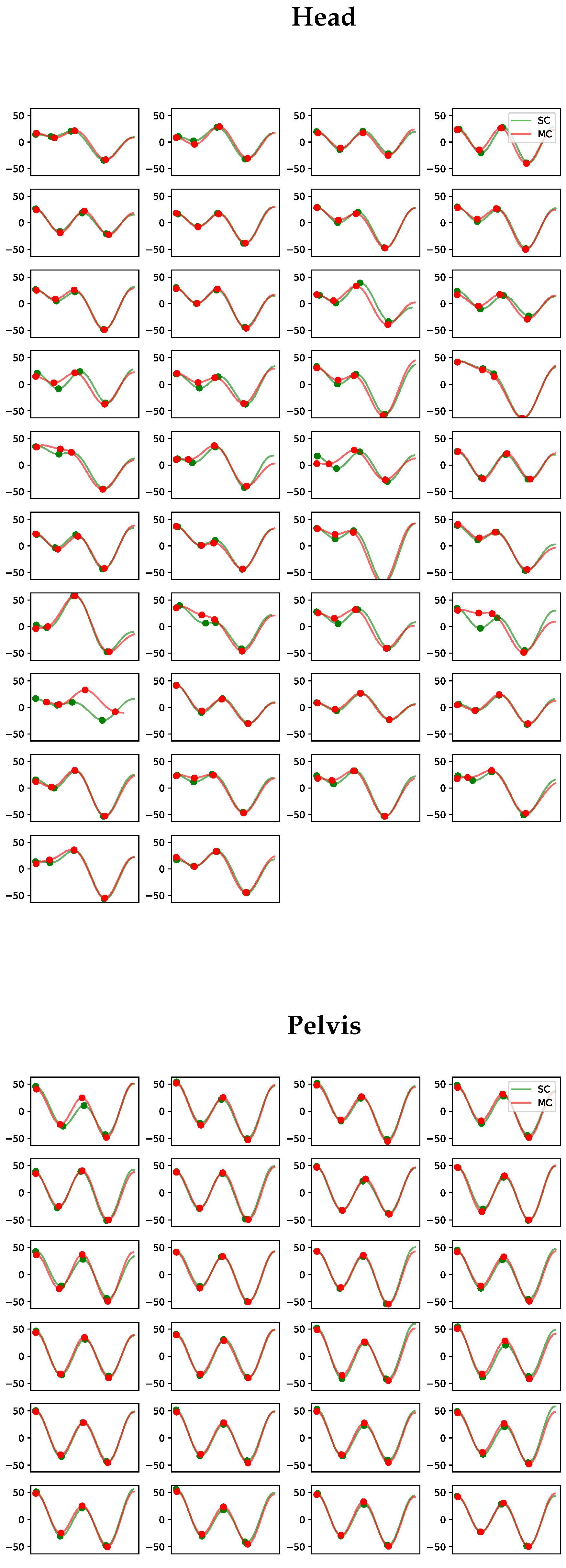
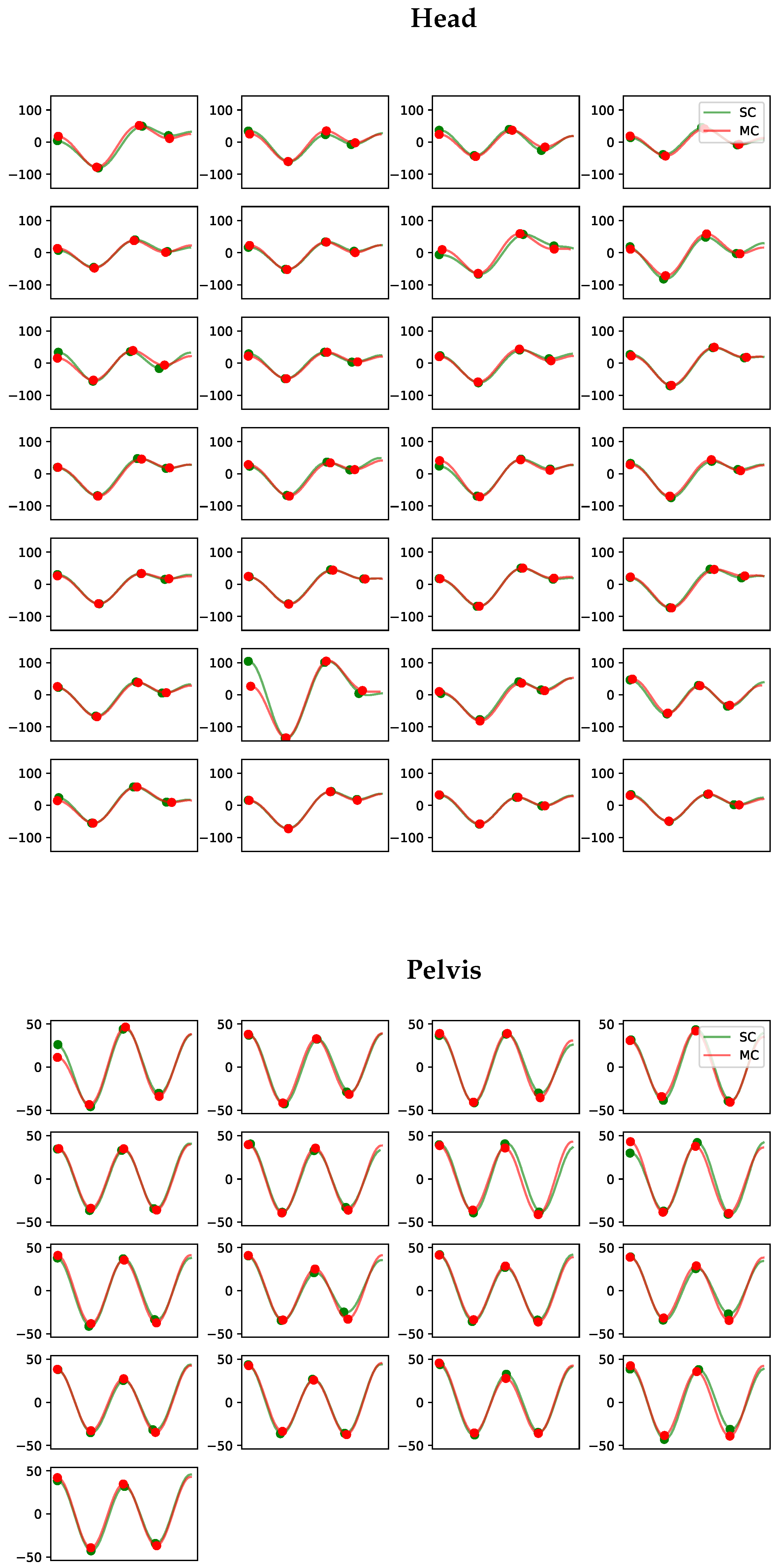
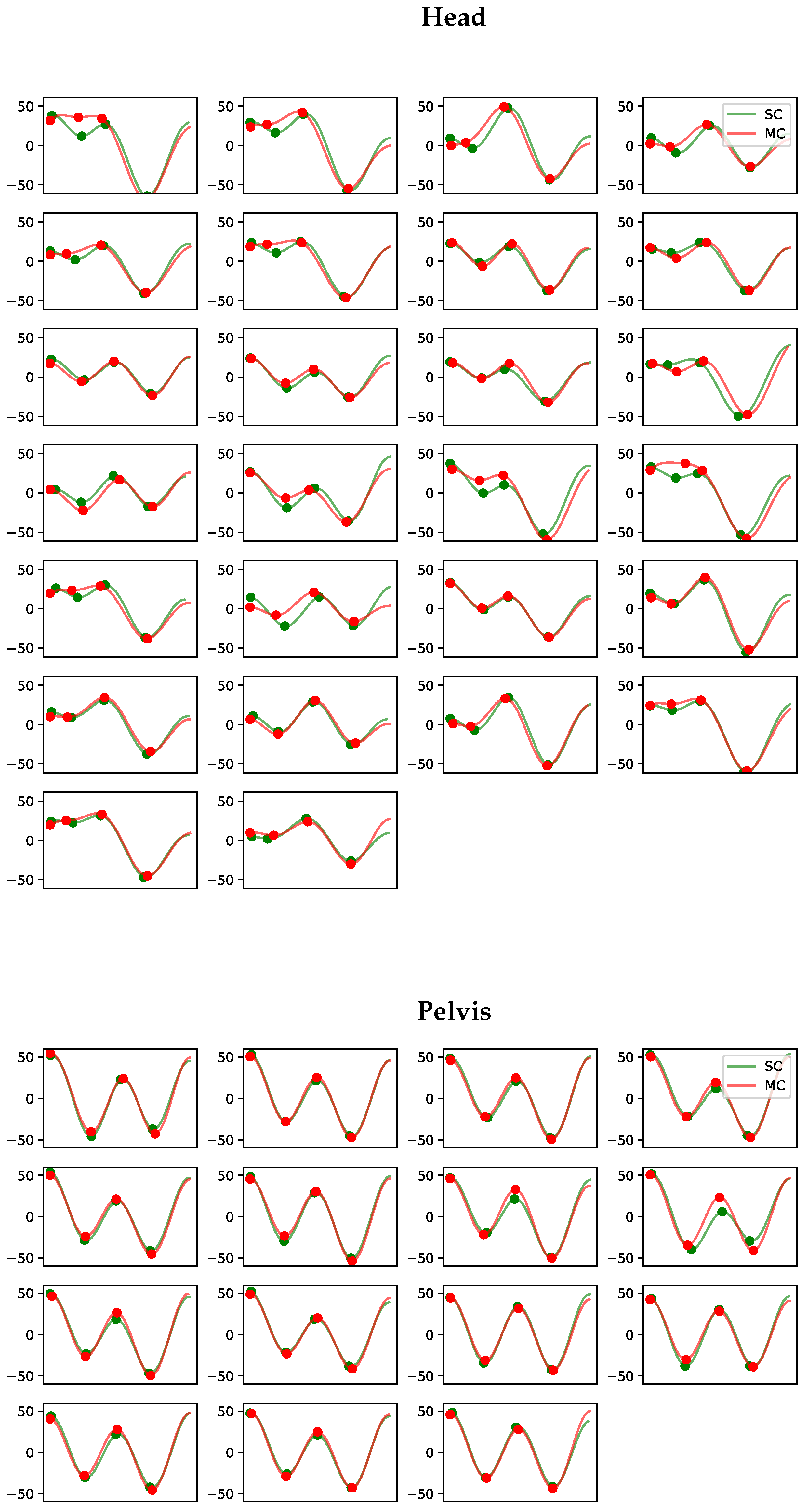
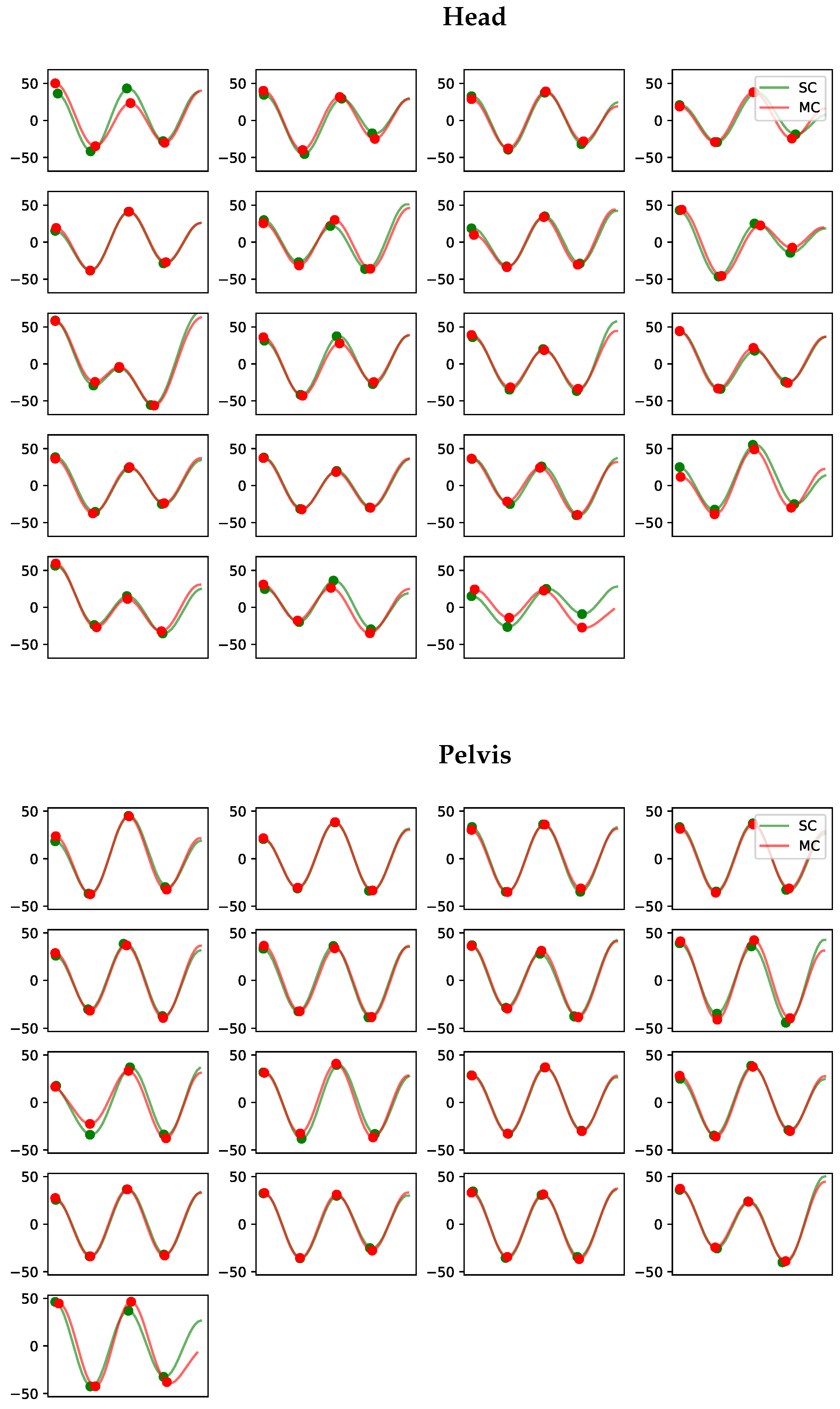
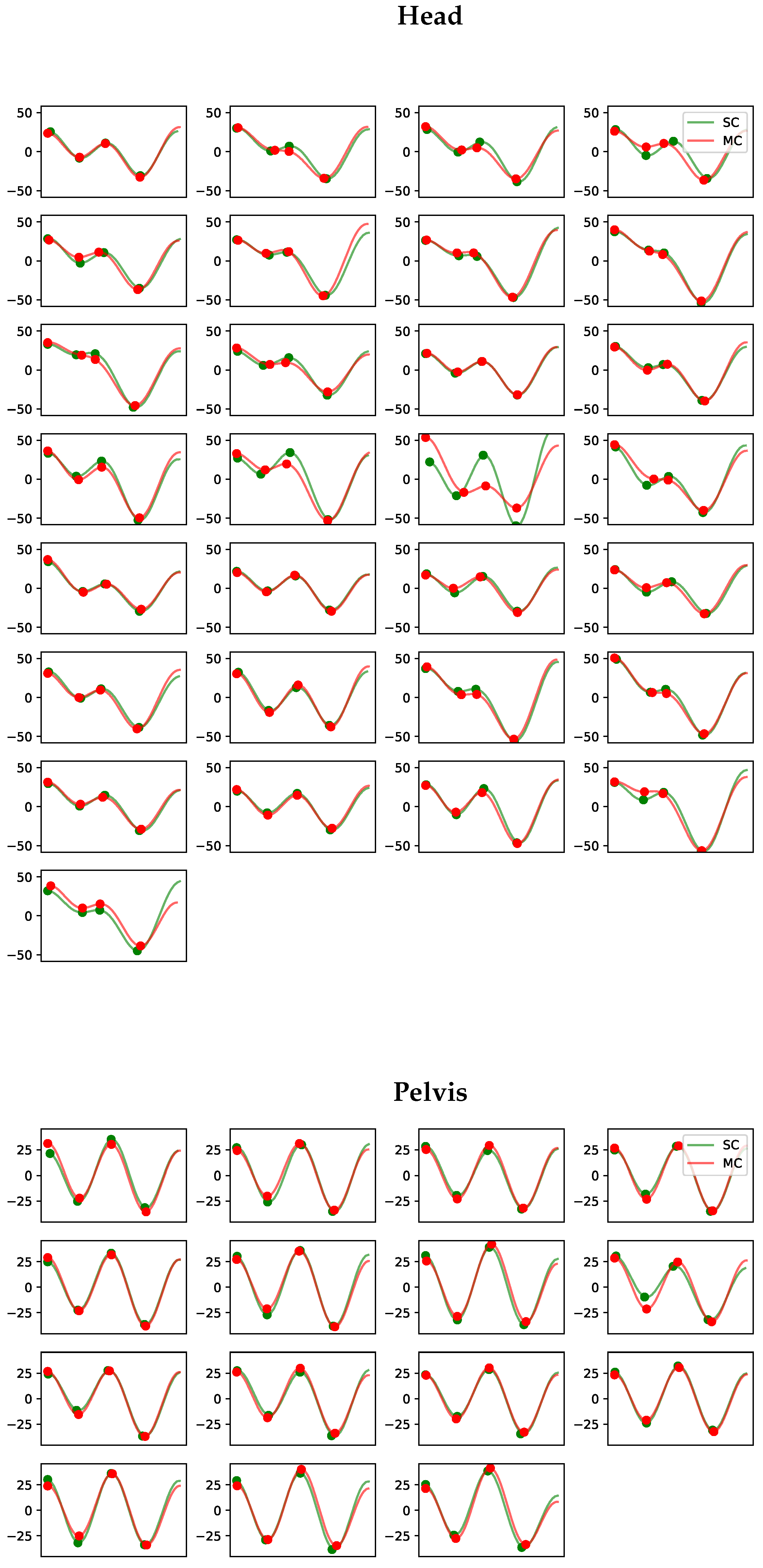
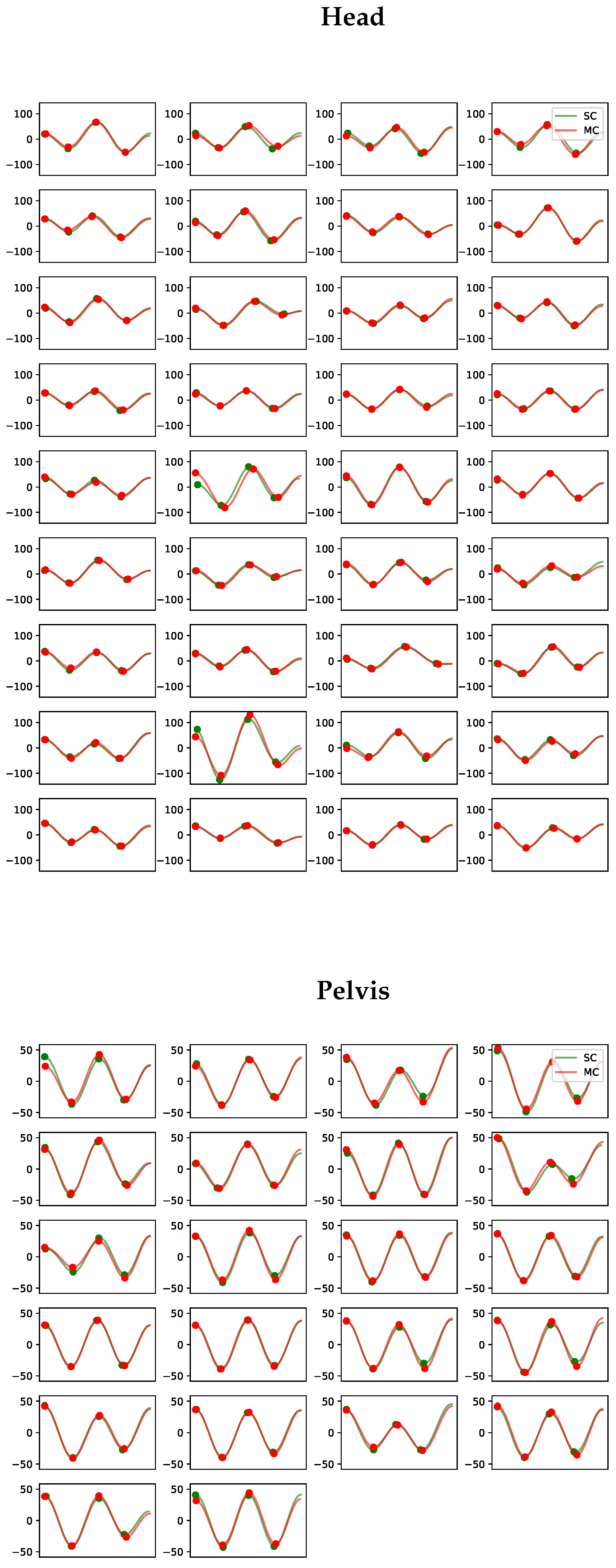
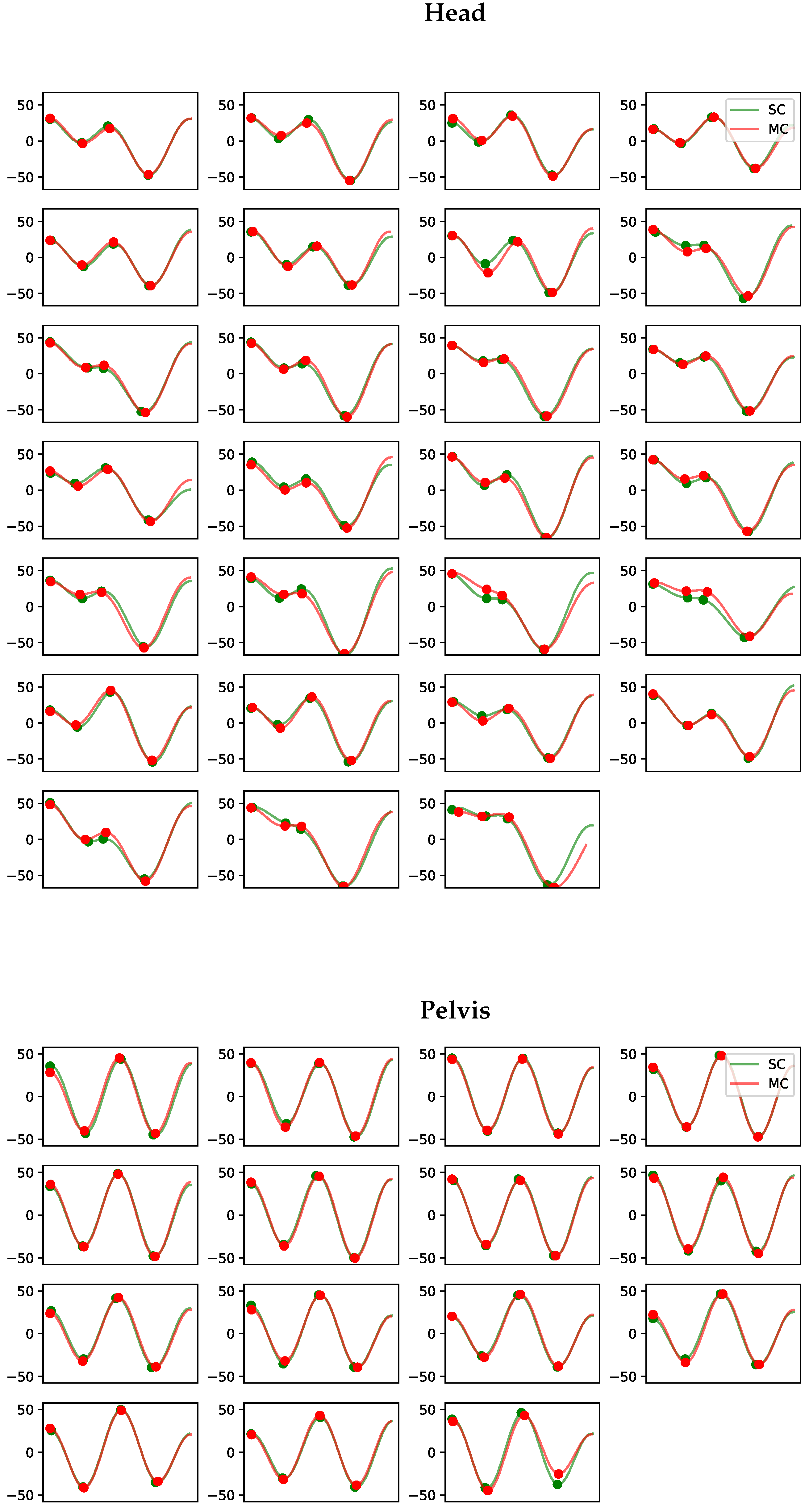
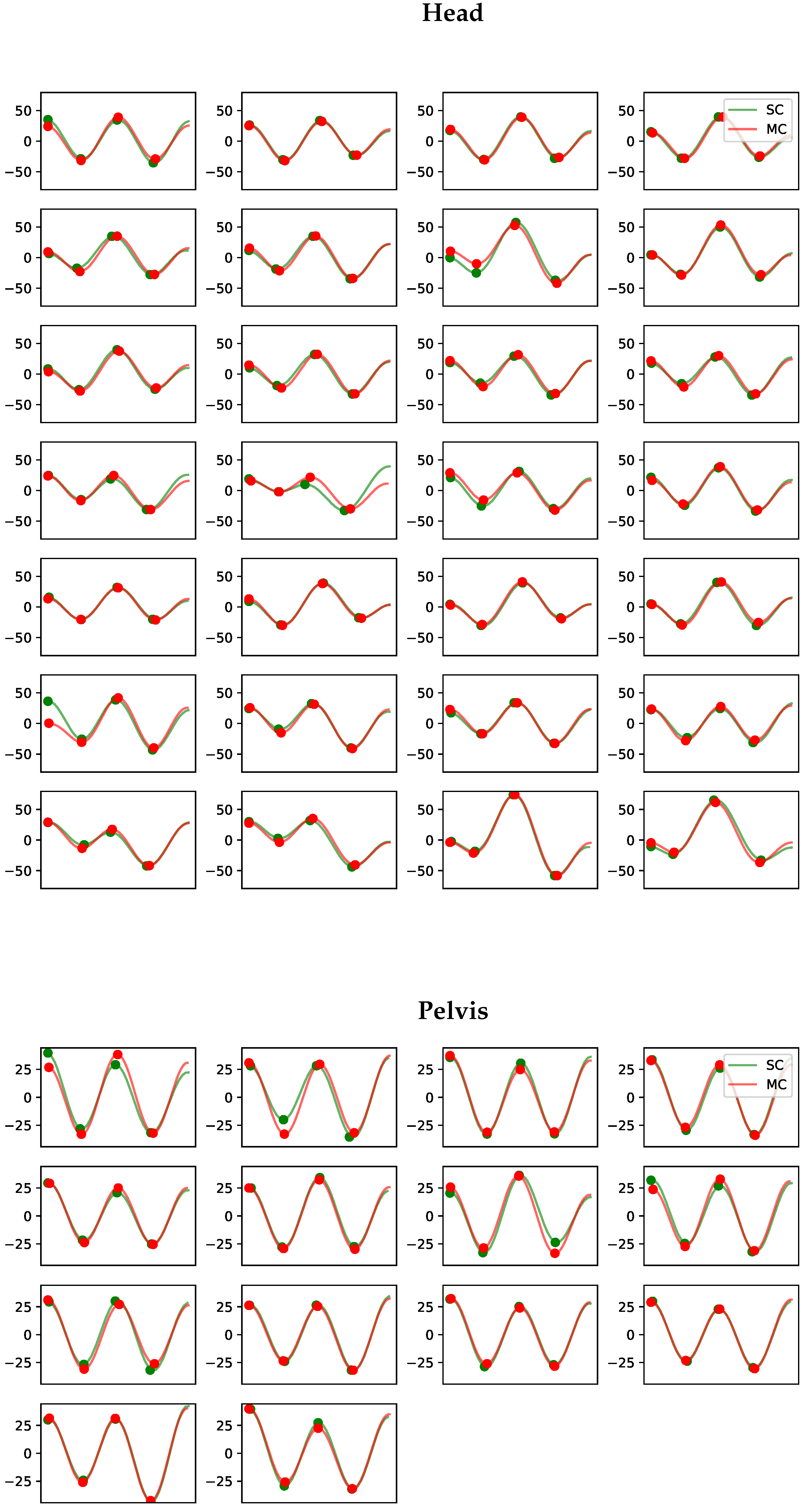
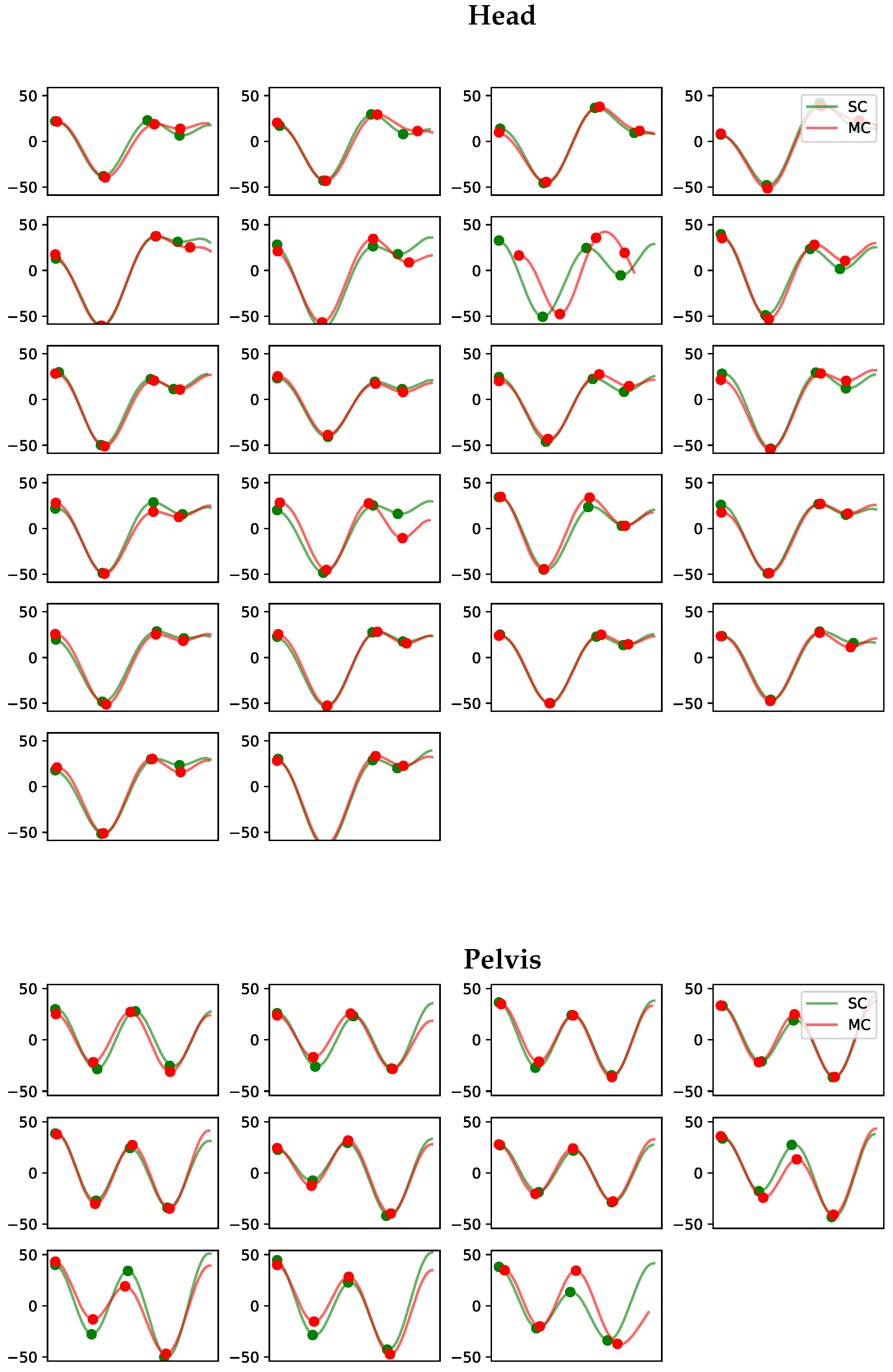
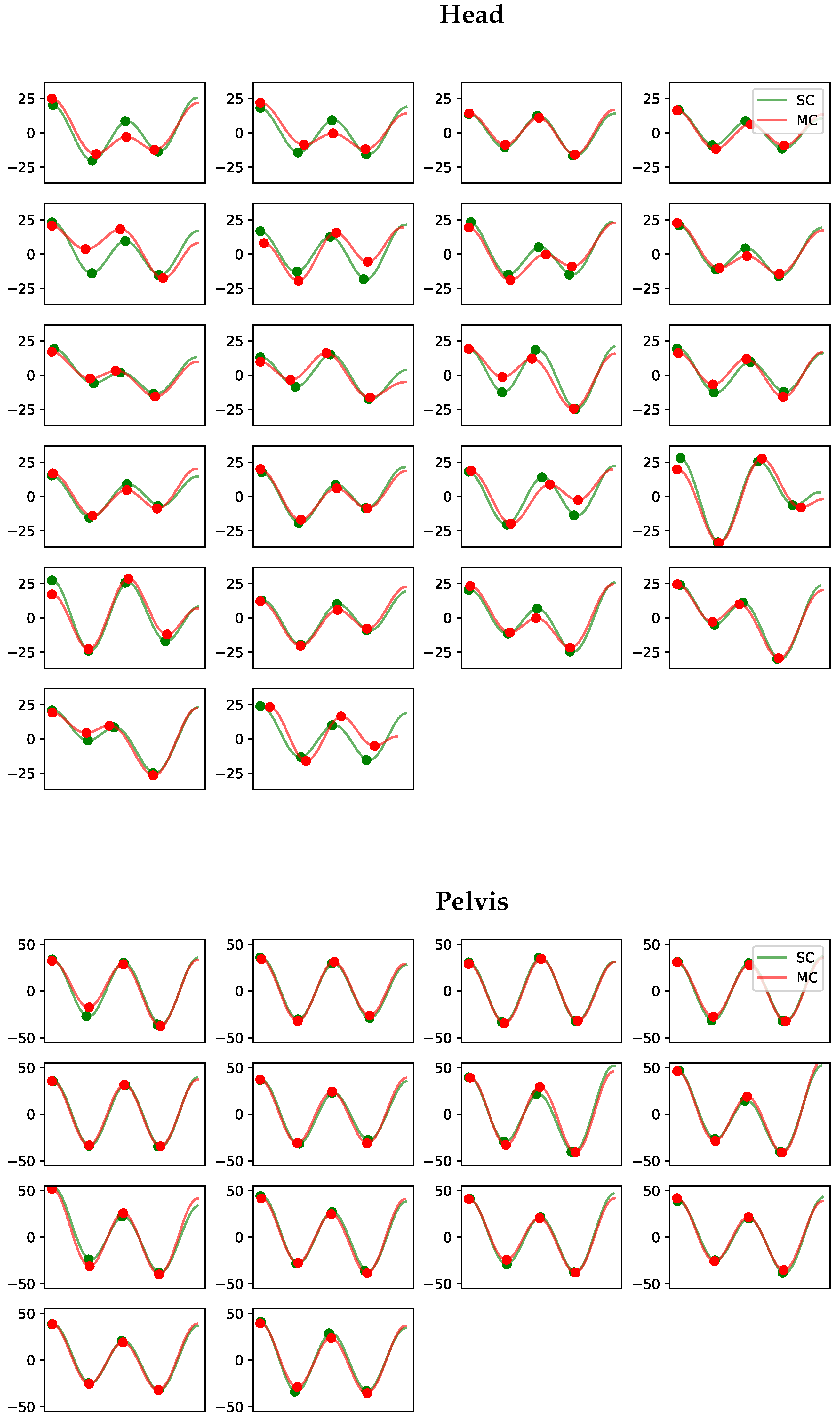
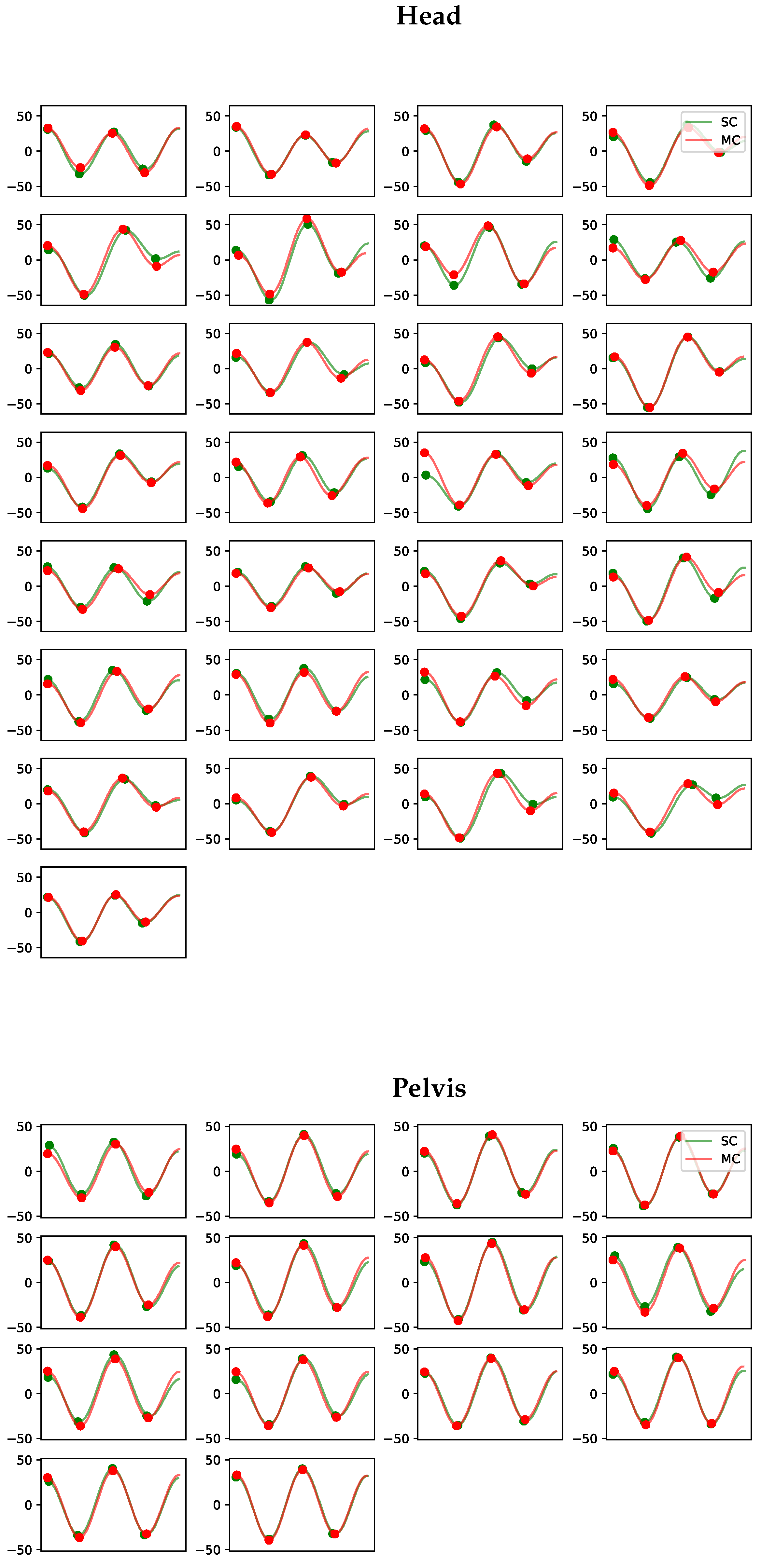
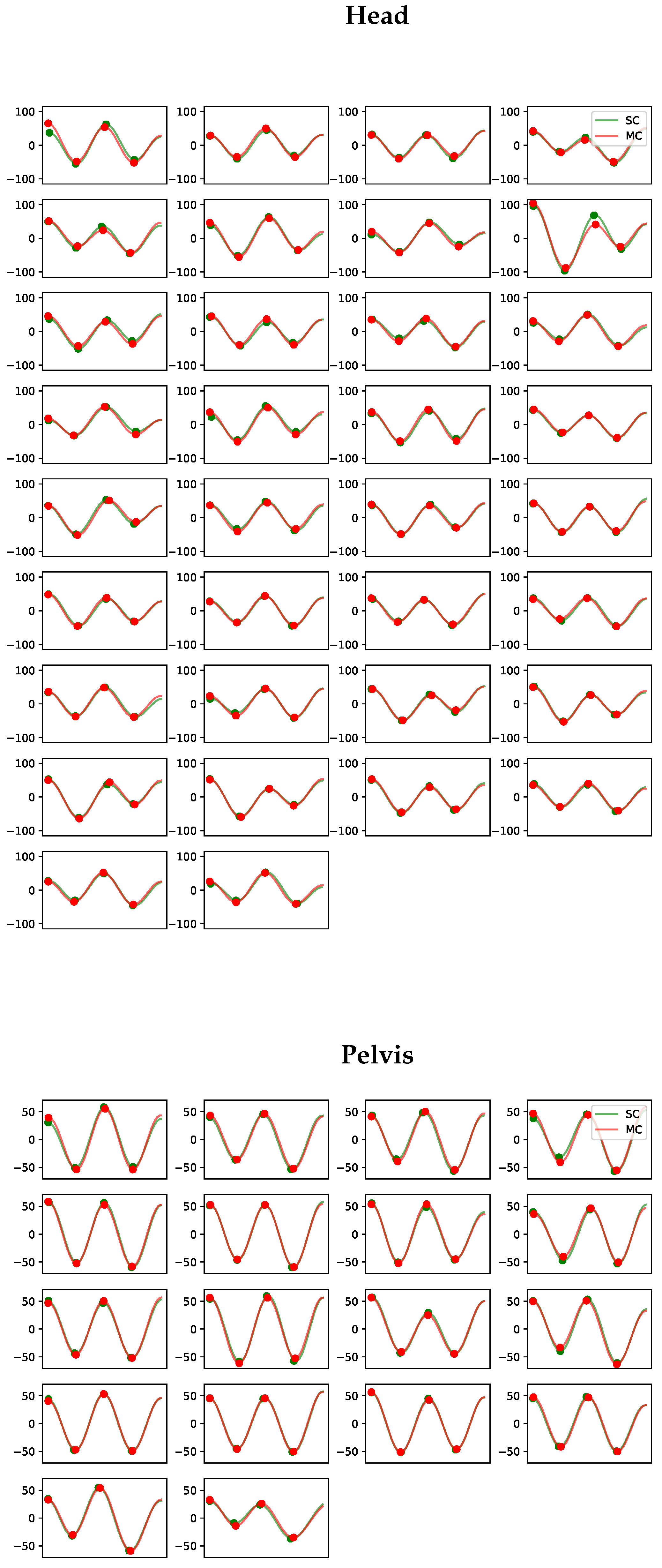
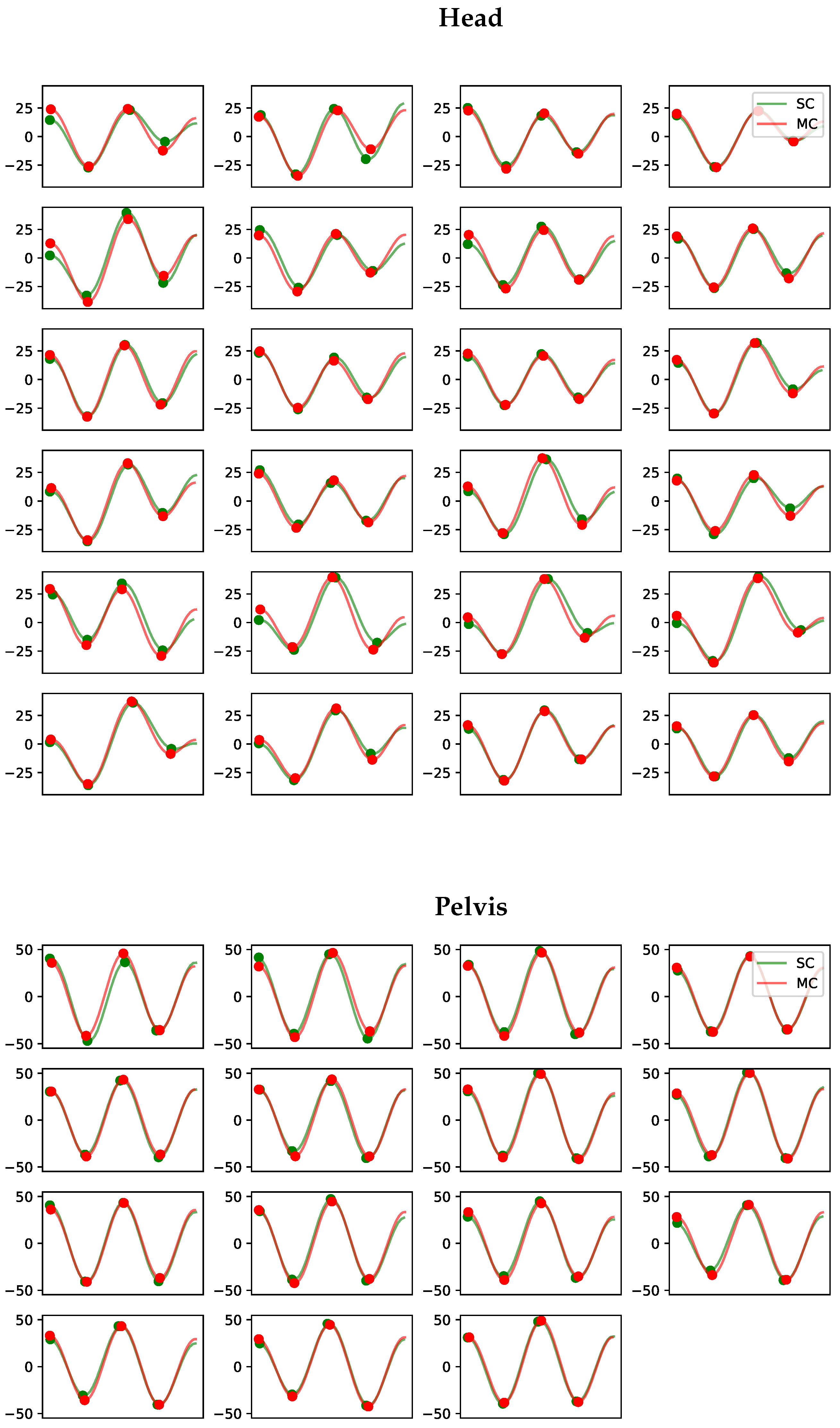
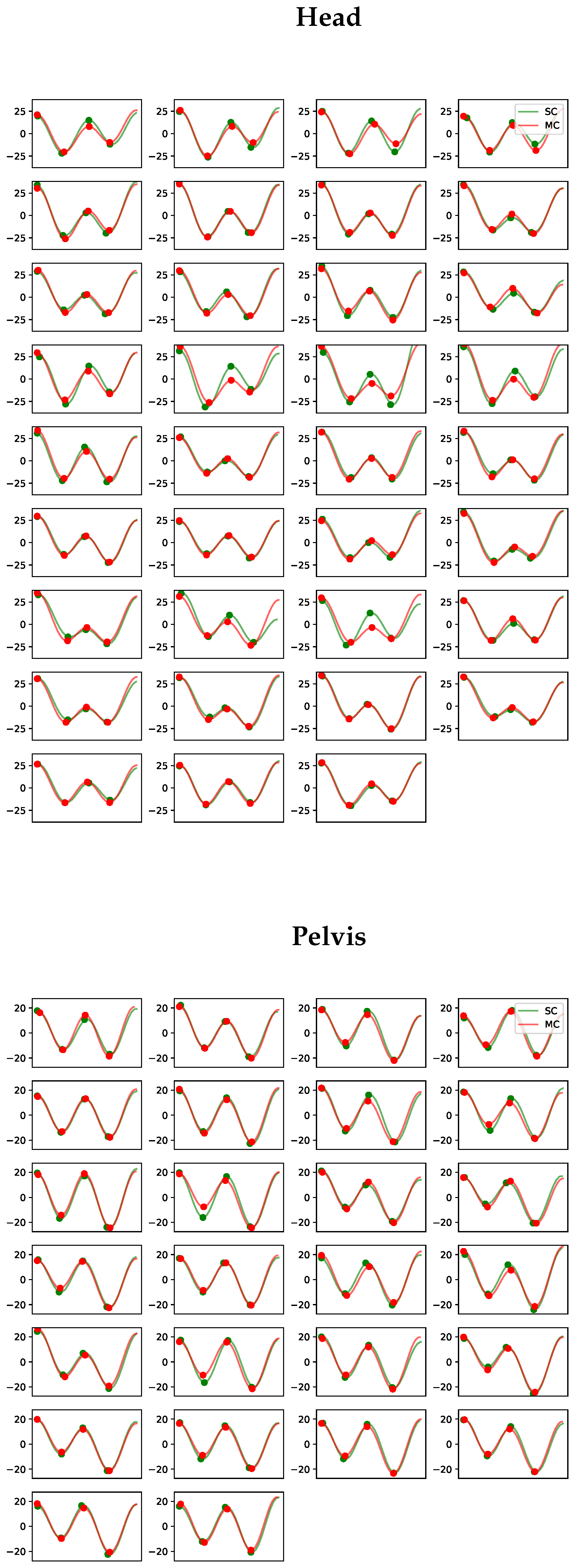
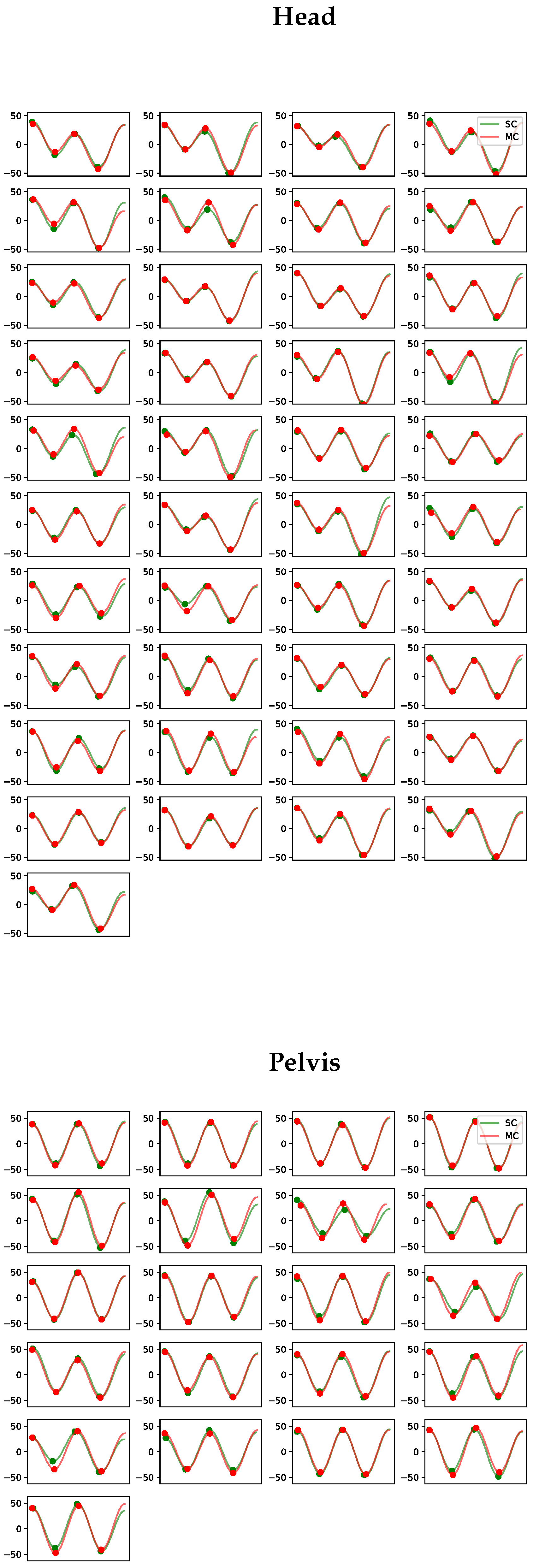
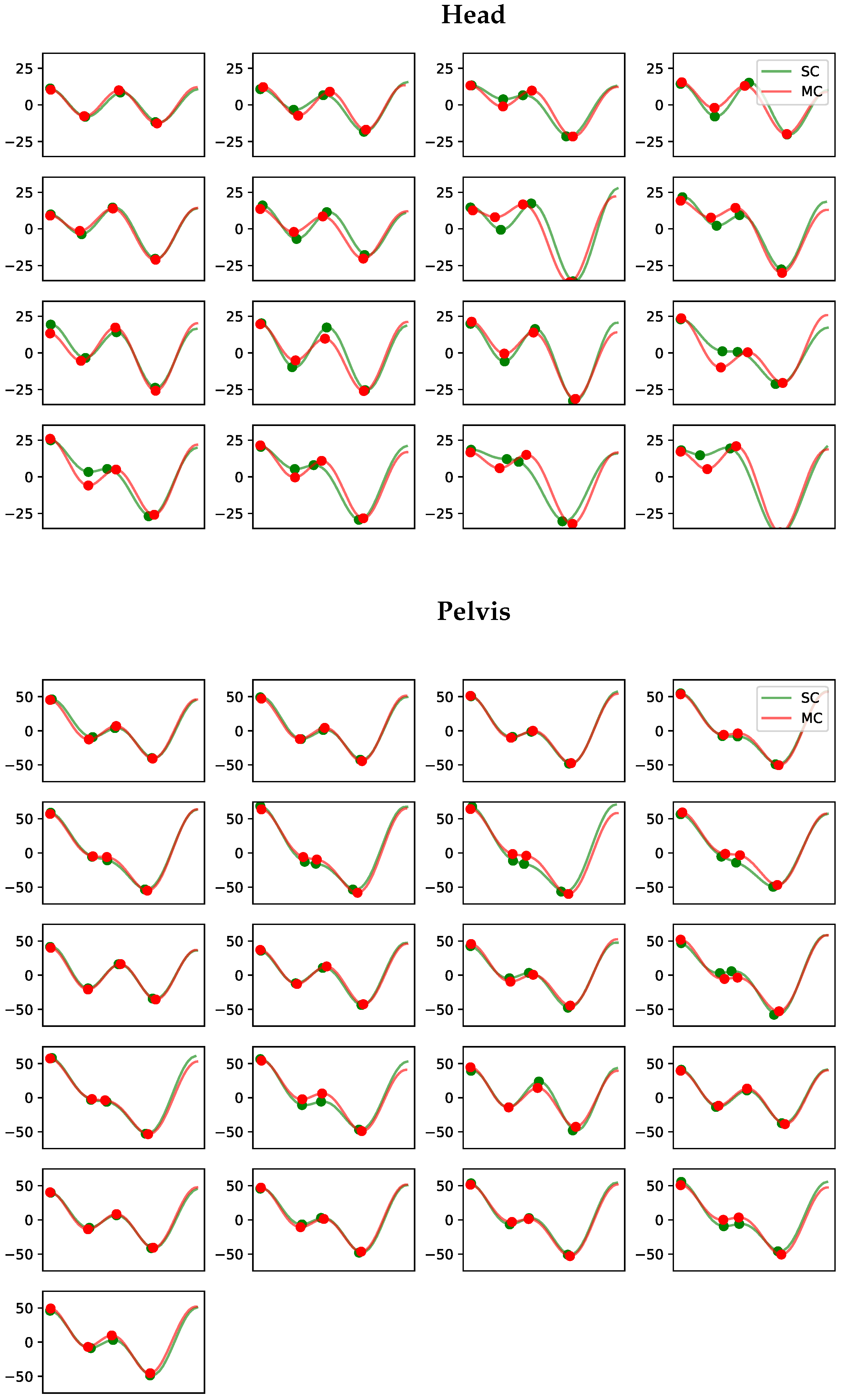
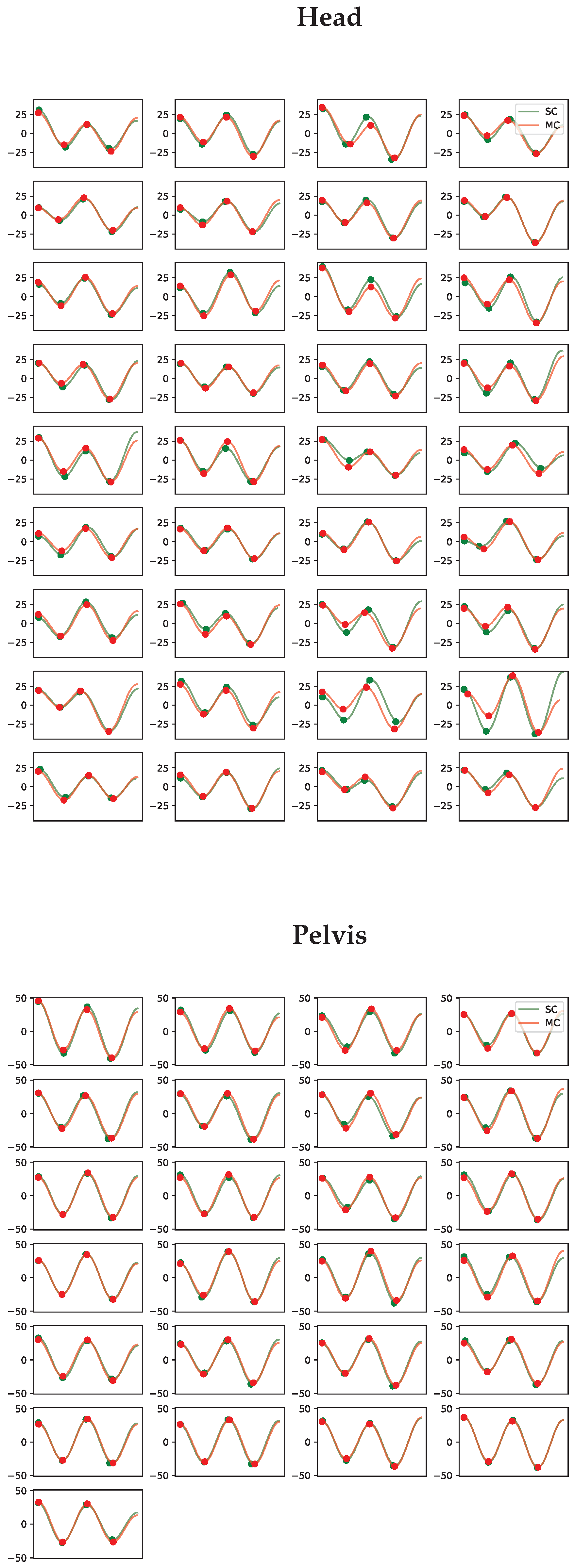
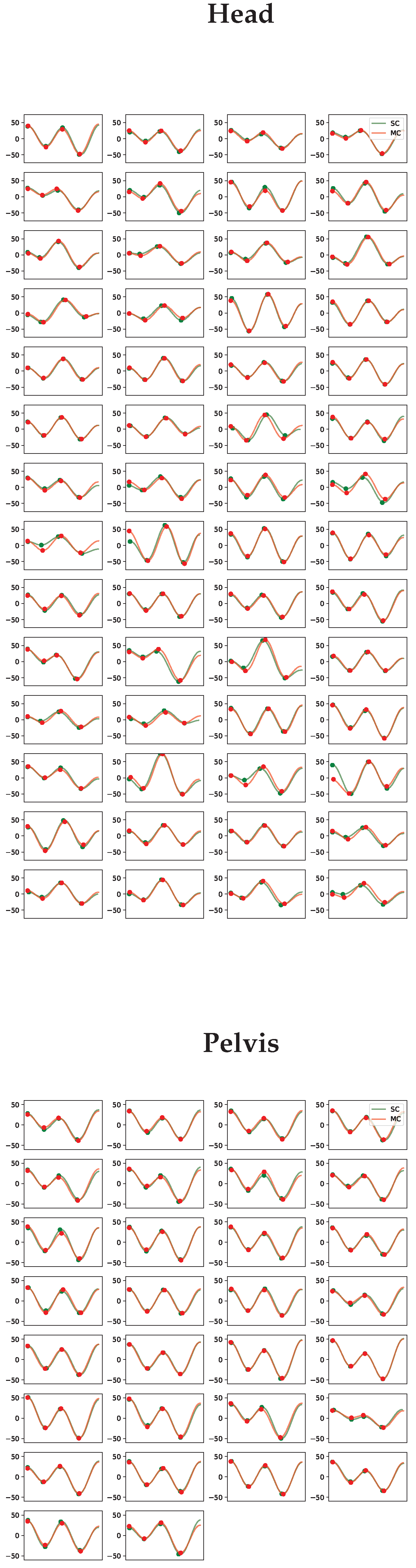
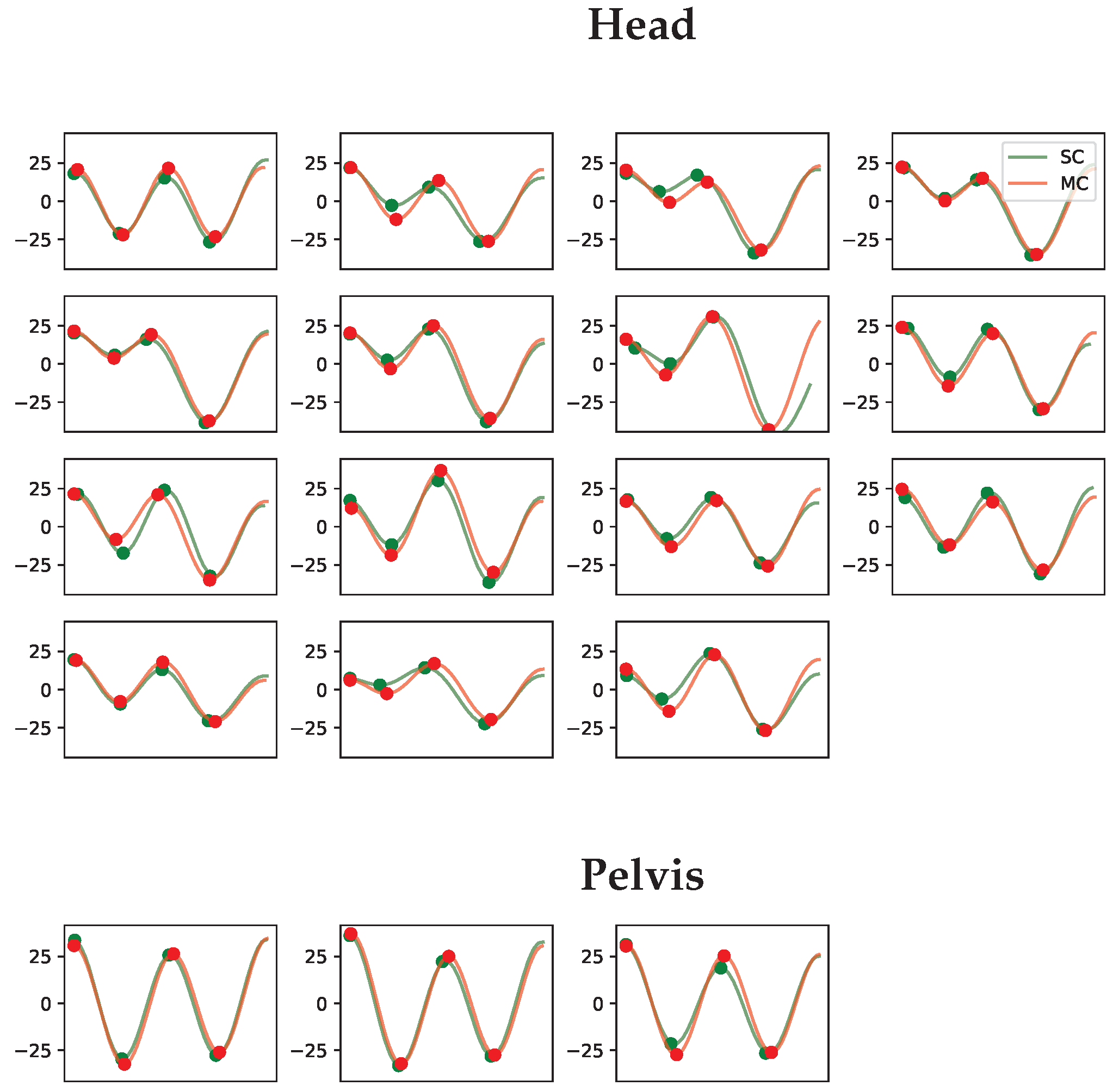
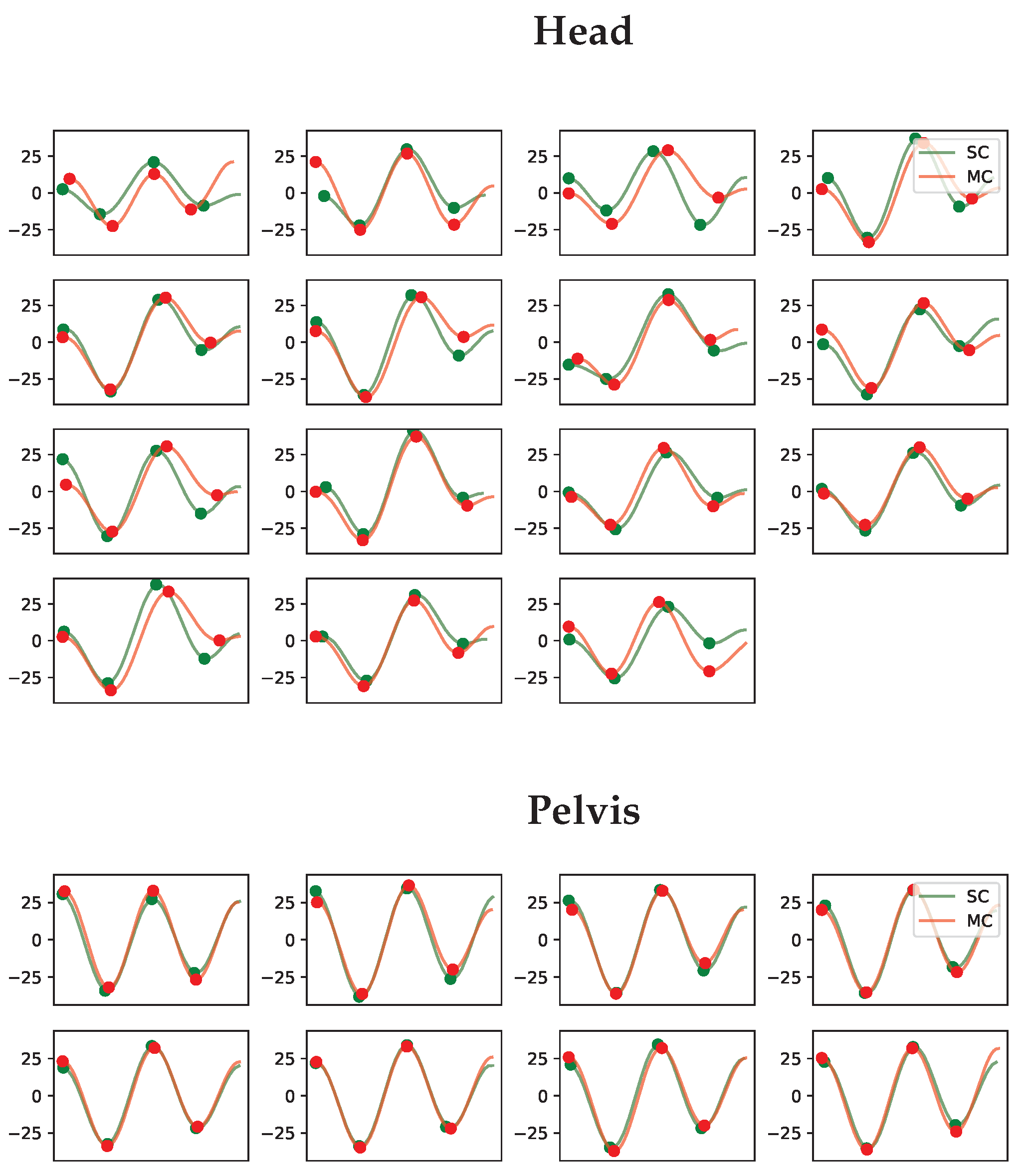
Appendix A. All Stride Curves
























References
- Roepstorff, C.; Gmel, A.I.; Arpagaus, S.; Bragança, F.M.S.; Hernlund, E.; Roepstorff, L.; Rhodin, M.; Weishaupt, M.A. Modelling fore- and hindlimb peak vertical force differences in trotting horses using upper body kinematic asymmetry variables. J. Biomech. 2022, 137, 111097. [Google Scholar] [CrossRef] [PubMed]
- Bell, R.; Reed, S.K.; Schoonover, M.; Whitfield, C.; Yonezawa, Y.; Maki, H.; Pai, F.P.; Keegan, K.G. Associations of force plate and body-mounted inertial sensor measurements for identification of hind limb lameness in horses. Am. J. Vet. Res. 2016, 77, 337–345. [Google Scholar] [CrossRef] [PubMed]
- Buchner, H.H.; Savelberg, H.H.; Schamhardt, H.C.; Barneveld, A. Head and trunk movement adaptations in horses with experimentally induced fore- or hindlimb lameness. Equine Vet. J. 1996, 28, 71–76. [Google Scholar] [CrossRef] [PubMed]
- Parkes, R.S.; Weller, R.; Groth, A.M.; May, S.; Pfau, T. Evidence of the development of ‘domain-restricted’ expertise in the recognition of asymmetric motion characteristics of hindlimb lameness in the horse. Equine Vet. J. 2009, 41, 112–117. [Google Scholar] [CrossRef]
- Holcombe, A.O. Seeing slow and seeing fast: Two limits on perception. Trends Cogn. Sci. 2009, 13, 216–221. [Google Scholar] [CrossRef]
- Keegan, K.G.; Dent, E.V.; Wilson, D.A.; Janicek, J.; Kramer, J.; Lacarrubba, A.; Walsh, D.M.; Cassells, M.W.; Schiltz, P.; Frees, K.E.; et al. Repeatability of subjective evaluation of lameness in horses. Equine Vet. J. 2010, 42, 92–97. [Google Scholar] [CrossRef]
- Hammarberg, M.; Egenvall, A.; Pfau, T.; Rhodin, M. Rater agreement of visual lameness assessment in horses during lungeing. Equine Vet. J. 2016, 48, 78–82. [Google Scholar] [CrossRef] [Green Version]
- Arkell, M.; Archer, R.M.; Guitian, F.J.; May, S.A. Evidence of bias affecting the interpretation of the results of local anaesthetic nerve blocks when assessing lameness in horses. Vet. Rec. 2006, 159, 346–349. [Google Scholar] [CrossRef]
- Mccracken, M.J.; Kramer, J.; Keegan, K.G.; Lopes, M.; Wilson, D.A.; Reed, S.K.; Lacarrubba, A.; Rasch, M. Comparison of an inertial sensor system of lameness quantification with subjective lameness evaluation. Equine Vet. J. 2012, 44, 652–656. [Google Scholar] [CrossRef]
- Rhodin, M.; Egenvall, A.; Andersen, P.H.; Pfau, T. Head and pelvic movement asymmetries at trot in riding horses in training and perceived as free from lameness by the owner. PLoS ONE 2017, 12, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Müller-Quirin, J.; Dittmann, M.T.; Roepstorff, C.; Arpagaus, S.; Latif, S.N.; Weishaupt, M.A. Riding Soundness—Comparison of Subjective With Objective Lameness Assessments of Owner-Sound Horses at Trot on a Treadmill. J. Equine Vet. Sci. 2020, 95, 103314. [Google Scholar] [CrossRef]
- Pfau, T.; Noordwijk, K.; Caviedes, M.F.S.; Persson-Sjodin, E.; Barstow, A.; Forbes, B.; Rhodin, M. Head, withers and pelvic movement asymmetry and their relative timing in trot in racing Thoroughbreds in training. Equine Vet. J. 2017, 50, 117–124. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pfau, T.; Parkes, R.S.; Burden, E.R.; Bell, N.; Fairhurst, H.; Witte, T.H. Movement asymmetry in working polo horses. Equine Vet. J. 2016, 48, 517–522. [Google Scholar] [CrossRef] [PubMed]
- Scheidegger, M.D.; Gerber, V.; Dolf, G.; Burger, D.; Flammer, S.A.; Ramseyer, A. Quantitative Gait Analysis Before and After a Cross-country Test in a Population of Elite Eventing Horses. J. Equine Vet. Sci. 2022, 117. [Google Scholar] [CrossRef] [PubMed]
- Lopes, M.A.; Eleuterio, A.; Mira, M.C. Objective Detection and Quantification of Irregular Gait With a Portable Inertial Sensor-Based System in Horses During an Endurance Race—A Preliminary Assessment. J. Equine Vet. Sci. 2018, 70, 123–129. [Google Scholar] [CrossRef]
- Kallerud, A.S.; Fjordbakk, C.T.; Hendrickson, E.H.S.; Persson-Sjodin, E.; Hammarberg, M.; Rhodin, M.; Hernlund, E. Objectively measured movement asymmetry in yearling Standardbred trotters. Equine Vet. J. 2020, 53, 590–599. [Google Scholar] [CrossRef]
- Maliye, S.; Voute, L.C.; Marshall, J.F. Naturally-occurring forelimb lameness in the horse results in significant compensatory load redistribution during trotting. Vet. J. 2015, 204, 208–213. [Google Scholar] [CrossRef]
- Pfau, T.; Witte, T.H.; Wilson, A.M. A method for deriving displacement data during cyclical movement using an inertial sensor. J. Exp. Biol. 2005, 208, 2503–2514. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Keegan, K.G.; Yonezawa, Y.; Pai, P.F.; Wilson, D.A. Accelerometer-based system for the detection of lameness in horses. Biomed. Sci. Instrum. 2002, 38, 107–112. [Google Scholar]
- Bosch, S.; Bragança, F.M.S.; Marin-Perianu, M.; Marin-Perianu, R.; van der Zwaag, B.; Voskamp, J.; Back, W.; van Weeren, R.; Havinga, P. EquiMoves: A Wireless Networked Inertial Measurement System for Objective Examination of Horse Gait. Sensors 2018, 18, 850. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hardeman, A.M.; Bragança, F.M.S.; Swagemakers, J.H.; van Weeren, P.R.; Roepstorff, L. Variation in gait parameters used for objective lameness assessment in sound horses at the trot on the straight line and the lunge. Equine Vet. J. 2019, 51, 831–839. [Google Scholar] [CrossRef] [Green Version]
- Serra Bragança, F.M.; Rhodin, M.; van Weeren, P.R. On the brink of daily clinical application of objective gait analysis: What evidence do we have so far from studies using an induced lameness model? Vet. J. 2018, 234, 11–23. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aurand, A.M.; Dufour, J.S.; Marras, W.S. Accuracy map of an optical motion capture system with 42 or 21 cameras in a large measurement volume. J. Biomech. 2017, 58, 237–240. [Google Scholar] [CrossRef] [PubMed]
- LeCun, Y.; Bengio, Y. Convolutional networks for images, speech, and time series. Handb. Brain Theory Neural Netw. 1995, 3361, 1995. [Google Scholar]
- Fukushima, K. Neocognitron: A hierarchical neural network capable of visual pattern recognition. Neural Netw. 1988, 1, 119–130. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Azhand, A.; Rabe, S.; Müller, S.; Sattler, I.; Heimann-Steinert, A. Algorithm based on one monocular video delivers highly valid and reliable gait parameters. Sci. Rep. 2021, 11, 1–10. [Google Scholar] [CrossRef]
- Wang, J.; Sun, K.; Cheng, T.; Jiang, B.; Deng, C.; Zhao, Y.; Liu, D.; Mu, Y.; Tan, M.; Wang, X.; et al. Deep high-resolution representation learning for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 43, 3349–3364. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, C.; Ghorbani, N.; Broomé, S.; Rashid, M.; Black, M.J.; Hernlund, E.; Kjellström, H.; Zuffi, S. hSMAL: Detailed Horse Shape and Pose Reconstruction for Motion Pattern Recognition. arXiv 2021, arXiv:2106.10102. [Google Scholar]
- Hatherley, J.J. Limits of trust in medical AI. J. Med. Ethics 2020, 46, 478–481. [Google Scholar] [CrossRef]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Bhat, G.; Lawin, F.J.; Danelljan, M.; Robinson, A.; Felsberg, M.; Gool, L.V.; Timofte, R. Learning what to learn for video object segmentation. In Proceedings of the European Conference on Computer Vision, Glasgow, UK, 23–28 August 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 777–794. [Google Scholar]
- Bragança, F.S.; Roepstorff, C.; Rhodin, M.; Pfau, T.; Van Weeren, P.; Roepstorff, L. Quantitative lameness assessment in the horse based on upper body movement symmetry: The effect of different filtering techniques on the quantification of motion symmetry. Biomed. Signal Process. Control 2020, 57, 101674. [Google Scholar] [CrossRef]
- Keegan, K.G.; Yonezawa, Y.; Pai, F.; Wilson, D.A.; Kramer, J. Evaluation of a sensor-based system of motion analysis for detection and quantification of forelimb and hind limb lameness in horses. Am. J. Vet. Res. 2004, 65, 665–670. [Google Scholar] [CrossRef]
- Pfau, T.; Boultbee, H.; Davis, H.; Walker, A.; Rhodin, M. Agreement between two inertial sensor gait analysis systems for lameness examinations in horses. Equine Vet. Educ. 2016, 28, 203–208. [Google Scholar] [CrossRef] [Green Version]
- Bland, J.M.; Altman, D. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 327, 307–310. [Google Scholar] [CrossRef]
- Keegan, K.G.; Kramer, J.; Yonezawa, Y.; Maki, H.; Pai, P.F.; Dent, E.V.; Kellerman, T.E.; Wilson, D.A.; Reed, S.K. Assessment of repeatability of a wireless, inertial sensor–based lameness evaluation system for horses. Am. J. Vet. Res. 2011, 72, 1156–1163. [Google Scholar] [CrossRef]
- Wang, Y.; Li, J.; Zhang, Y.; Sinnott, R.O. Identifying lameness in horses through deep learning. In Proceedings of the ACM Symposium on Applied Computing, Virtual, 22–26 March 2021; pp. 976–985. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Horse | N | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 16 | −0.4 | −4.8 | −1.5 | −1.1 | 13.1 | 17.9 | 15.2 | 15.4 | 18.1 | 16.5 | 66.6 |
| 2 | 23 | −2.1 | 8.7 | −9.4 | −7.3 | 43.0 | 34.3 | 12.3 | 10.4 | 19.7 | 20.8 | 82.2 |
| 3 | 29 | 2.3 | −1.9 | −1.6 | −3.9 | 9.5 | 11.4 | 17.7 | 15.0 | 13.6 | 14.1 | 70.4 |
| 4 | 38 | 4.1 | 3.4 | −39.8 | −44.0 | −0.8 | −4.2 | 14.3 | 15.7 | 14.8 | 16.8 | 71.2 |
| 5 | 28 | −0.3 | 2.2 | 70.0 | 70.3 | −17.5 | −19.8 | 17.4 | 15.2 | 17.2 | 14.5 | 109.6 |
| 6 | 26 | 4.4 | 5.7 | −39.2 | −43.6 | −3.9 | −9.6 | 16.8 | 19.1 | 15.8 | 15.8 | 68.5 |
| 7 | 19 | 3.3 | −3.1 | 5.4 | 2.1 | 3.3 | 6.3 | 13.5 | 14.2 | 19.9 | 21.1 | 77.5 |
| 8 | 22 | −0.6 | −3.7 | 7.1 | 7.7 | 8.8 | 12.5 | 15.7 | 11.9 | 11.0 | 10.4 | 73.6 |
| 9 | 29 | 1.0 | −5.0 | −39.7 | −40.7 | 15.7 | 20.6 | 9.1 | 10.6 | 9.5 | 10.0 | 70.8 |
| 10 | 36 | −0.6 | 0.6 | 1.8 | 2.4 | −19.1 | −19.8 | 22.3 | 22.0 | 20.7 | 21.4 | 95.2 |
| 11 | 27 | 0.0 | 0.4 | −57.8 | −57.9 | 13.0 | 12.5 | 11.5 | 13.1 | 16.4 | 15.2 | 90.1 |
| 12 | 28 | −2.5 | 1.9 | −11.7 | −9.2 | −18.5 | −20.4 | 14.3 | 13.5 | 17.5 | 14.9 | 71.0 |
| 13 | 22 | −0.0 | 1.6 | 62.8 | 62.8 | −3.7 | −5.3 | 8.9 | 8.2 | 10.8 | 10.3 | 79.8 |
| 14 | 22 | 0.3 | −0.9 | −1.6 | −1.9 | 8.7 | 9.6 | 9.7 | 13.8 | 6.1 | 10.6 | 39.0 |
| 15 | 29 | 1.5 | −1.8 | 27.0 | 25.5 | −14.1 | −12.4 | 13.8 | 13.1 | 11.2 | 11.6 | 75.2 |
| 16 | 19 | −6.8 | 0.2 | 22.8 | 29.6 | 10.9 | 10.7 | 19.1 | 26.2 | 18.6 | 28.1 | 75.5 |
| 17 | 34 | −0.2 | −3.7 | 3.7 | 3.9 | −4.2 | −0.5 | 18.9 | 17.5 | 19.6 | 18.7 | 95.0 |
| 18 | 24 | 1.8 | −3.1 | 14.9 | 13.1 | −13.1 | −10.1 | 8.3 | 7.9 | 13.6 | 11.4 | 57.9 |
| 19 | 35 | −0.4 | −2.1 | 0.2 | 0.6 | 24.2 | 26.3 | 6.9 | 6.4 | 8.6 | 6.0 | 51.0 |
| 20 | 41 | −0.5 | 1.7 | −21.6 | −21.0 | 7.0 | 5.3 | 11.9 | 12.6 | 9.1 | 8.5 | 71.4 |
| 21 | 16 | −0.4 | 1.2 | −23.5 | −23.0 | 5.8 | 4.6 | 8.4 | 7.7 | 6.7 | 7.4 | 43.0 |
| 22 | 36 | 2.2 | −1.8 | −13.0 | −15.2 | −1.5 | 0.3 | 8.5 | 8.2 | 12.3 | 10.5 | 50.9 |
| 23 | 56 | −4.2 | −0.1 | −18.2 | −14.0 | −16.3 | −16.2 | 18.7 | 17.6 | 18.8 | 18.9 | 74.7 |
| mean | 28.5 | 1.7 | 2.6 | 21.5 | 21.8 | 12.0 | 12.6 | 13.6 | 13.7 | 14.3 | 14.5 | 72.2 |
| Horse | N | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 13 | 1.0 | −0.1 | −0.1 | −1.1 | 6.6 | 6.6 | 8.4 | 6.1 | 8.2 | 8.3 | 83.4 |
| 2 | 15 | 1.7 | 4.3 | −0.4 | −2.1 | 0.6 | −3.8 | 11.0 | 8.6 | 10.0 | 8.6 | 82.3 |
| 3 | 16 | −1.8 | 2.1 | −0.6 | 1.2 | −2.7 | −4.8 | 6.5 | 4.0 | 8.9 | 5.6 | 82.6 |
| 4 | 24 | 4.3 | 6.5 | −15.8 | −20.1 | 21.0 | 14.5 | 9.3 | 7.9 | 9.6 | 8.1 | 92.5 |
| 5 | 17 | 5.5 | −0.5 | 5.7 | 0.2 | 4.3 | 4.8 | 5.1 | 4.3 | 10.3 | 11.3 | 79.3 |
| 6 | 15 | 4.8 | 5.9 | −12.8 | −17.6 | 27.2 | 21.3 | 11.0 | 7.5 | 8.9 | 6.3 | 92.8 |
| 7 | 17 | 1.5 | 0.0 | −0.1 | −1.5 | −5.2 | −5.2 | 6.8 | 6.9 | 10.5 | 8.5 | 74.8 |
| 8 | 13 | 1.1 | 3.1 | 2.1 | 1.0 | −8.6 | −11.6 | 8.0 | 8.1 | 9.2 | 4.7 | 76.7 |
| 9 | 15 | −0.8 | 2.2 | −13.0 | −12.2 | −4.3 | −6.5 | 7.1 | 4.6 | 6.0 | 6.0 | 67.5 |
| 10 | 22 | 4.6 | 2.1 | 9.0 | 4.4 | 2.2 | 0.1 | 6.5 | 7.7 | 15.8 | 16.0 | 77.7 |
| 11 | 15 | −1.7 | 0.7 | −7.0 | −5.3 | −11.9 | −12.6 | 6.4 | 8.3 | 10.2 | 9.6 | 88.0 |
| 12 | 14 | −0.9 | 1.1 | −4.5 | −3.6 | 2.6 | 1.5 | 6.4 | 4.8 | 7.3 | 7.9 | 64.7 |
| 13 | 11 | 3.9 | 2.4 | −12.6 | −16.5 | 9.0 | 6.6 | 9.7 | 6.9 | 8.1 | 8.5 | 70.8 |
| 14 | 14 | 1.3 | 0.9 | −5.1 | −6.4 | 13.0 | 12.0 | 5.8 | 6.7 | 9.0 | 8.6 | 74.8 |
| 15 | 14 | −2.3 | −3.0 | 5.8 | 8.1 | −16.9 | −13.9 | 5.7 | 3.1 | 6.0 | 3.3 | 75.3 |
| 16 | 13 | 4.2 | −1.1 | 11.8 | 7.7 | −25.8 | −24.7 | 10.5 | 13.0 | 13.8 | 8.7 | 75.7 |
| 17 | 18 | −1.4 | −0.8 | −10.6 | −9.3 | −1.4 | −0.6 | 12.2 | 11.2 | 11.4 | 11.5 | 103.7 |
| 18 | 15 | −3.2 | −0.3 | −2.8 | 0.4 | −13.1 | −12.8 | 5.6 | 4.6 | 7.1 | 3.3 | 85.5 |
| 19 | 26 | 1.2 | −1.2 | −9.6 | −10.8 | 4.4 | 5.6 | 3.6 | 3.4 | 4.3 | 4.6 | 39.6 |
| 20 | 21 | −4.9 | 1.3 | −7.2 | −2.3 | 0.1 | −1.2 | 6.5 | 6.6 | 11.6 | 9.0 | 87.8 |
| 21 | 21 | 0.8 | 2.6 | −38.0 | −38.9 | 48.5 | 46.0 | 7.1 | 6.8 | 12.7 | 8.6 | 97.7 |
| 22 | 25 | −1.5 | 2.8 | −10.2 | −8.7 | −1.4 | −4.2 | 6.6 | 5.1 | 5.5 | 6.1 | 67.0 |
| 23 | 30 | 1.0 | 0.4 | −21.5 | −22.6 | 12.5 | 12.1 | 8.9 | 9.8 | 8.8 | 8.0 | 72.6 |
| mean | 17.6 | 2.4 | 2.0 | 9.0 | 8.8 | 10.6 | 10.1 | 7.6 | 6.8 | 9.3 | 7.9 | 78.8 |
| Per Trial | |
|---|---|
| head | 2.2 mm |
| pelvis | 2.2 mm |
| head | 8.7 mm |
| pelvis | 6.5 mm |
| head | 0.0 mm |
| pelvis | 0.0 mm |
| Per Stride | |
| head mean RMSD | 5.0 mm |
| pelvis mean RMSD | 3.5 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lawin, F.J.; Byström, A.; Roepstorff, C.; Rhodin, M.; Almlöf, M.; Silva, M.; Andersen, P.H.; Kjellström, H.; Hernlund, E. Is Markerless More or Less? Comparing a Smartphone Computer Vision Method for Equine Lameness Assessment to Multi-Camera Motion Capture. Animals 2023, 13, 390. https://doi.org/10.3390/ani13030390
Lawin FJ, Byström A, Roepstorff C, Rhodin M, Almlöf M, Silva M, Andersen PH, Kjellström H, Hernlund E. Is Markerless More or Less? Comparing a Smartphone Computer Vision Method for Equine Lameness Assessment to Multi-Camera Motion Capture. Animals. 2023; 13(3):390. https://doi.org/10.3390/ani13030390
Chicago/Turabian StyleLawin, Felix Järemo, Anna Byström, Christoffer Roepstorff, Marie Rhodin, Mattias Almlöf, Mudith Silva, Pia Haubro Andersen, Hedvig Kjellström, and Elin Hernlund. 2023. "Is Markerless More or Less? Comparing a Smartphone Computer Vision Method for Equine Lameness Assessment to Multi-Camera Motion Capture" Animals 13, no. 3: 390. https://doi.org/10.3390/ani13030390