
Biomechanical Tests on Long-Bone Elliptical Medullary-Canal Endoprostheses for Limb Salvage in Dogs
 , ,
, ,  and
and
Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Endoprosthesis Design
2.2. 3D Printing Filaments
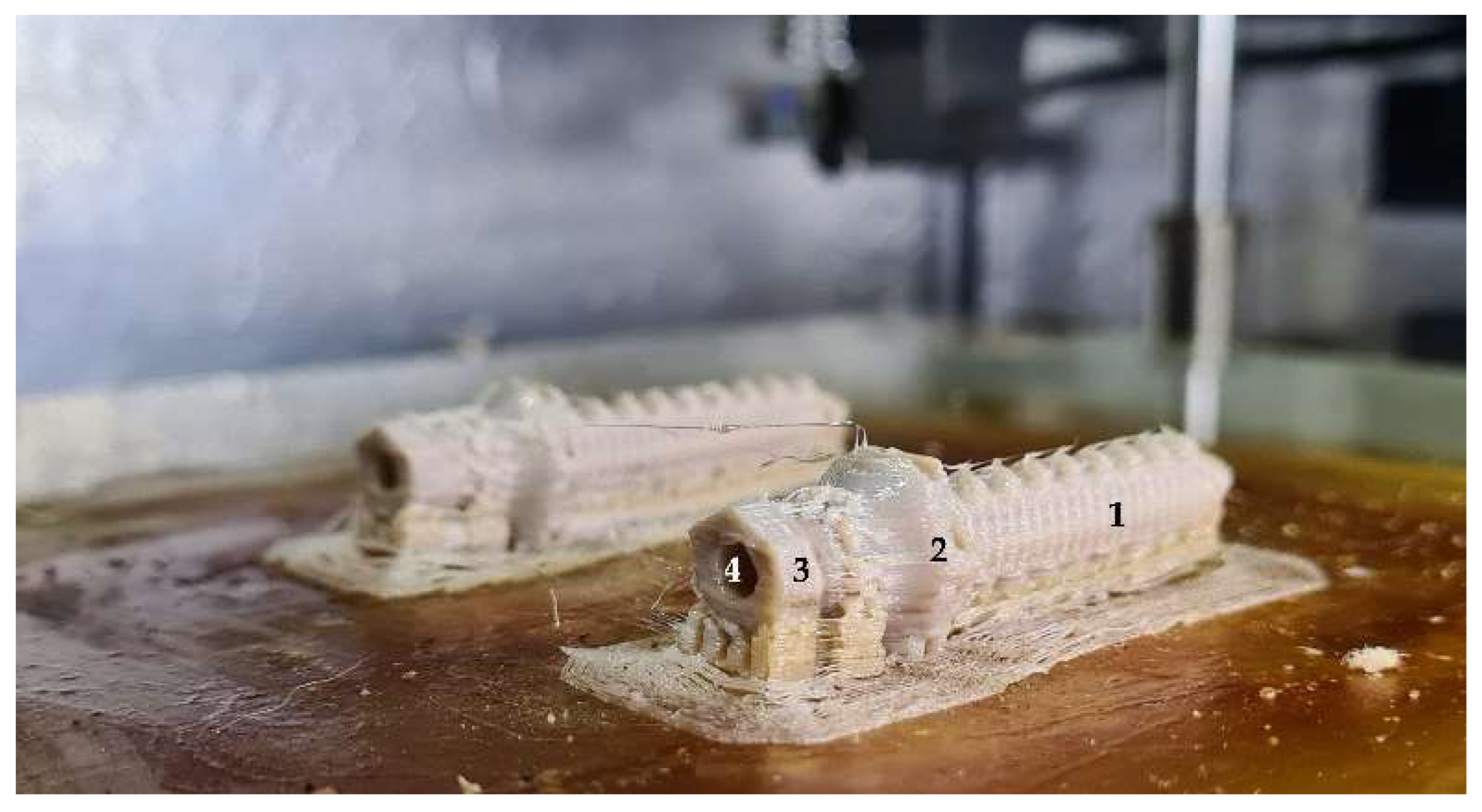
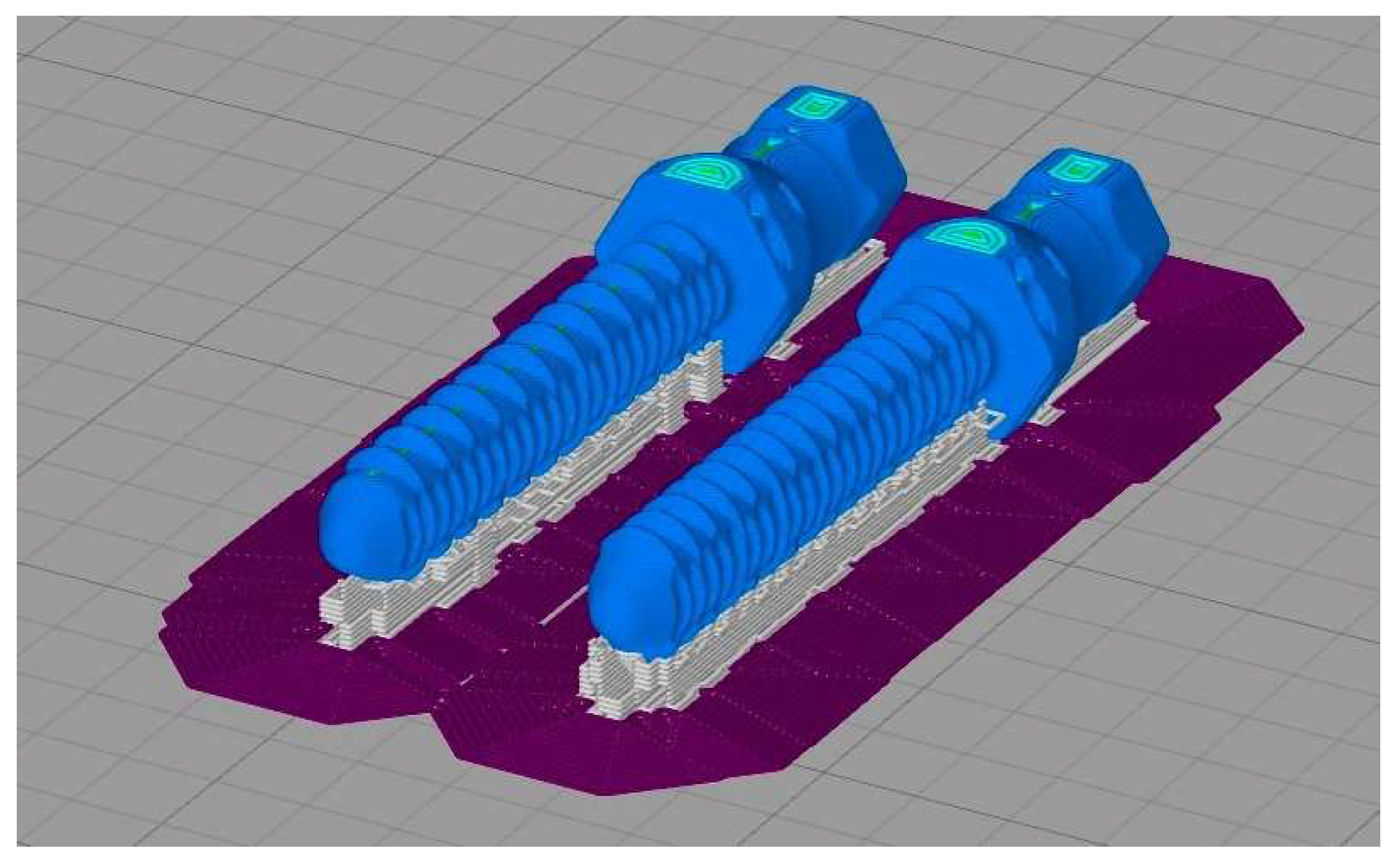
2.3. 3D Printing Parameters and Direction
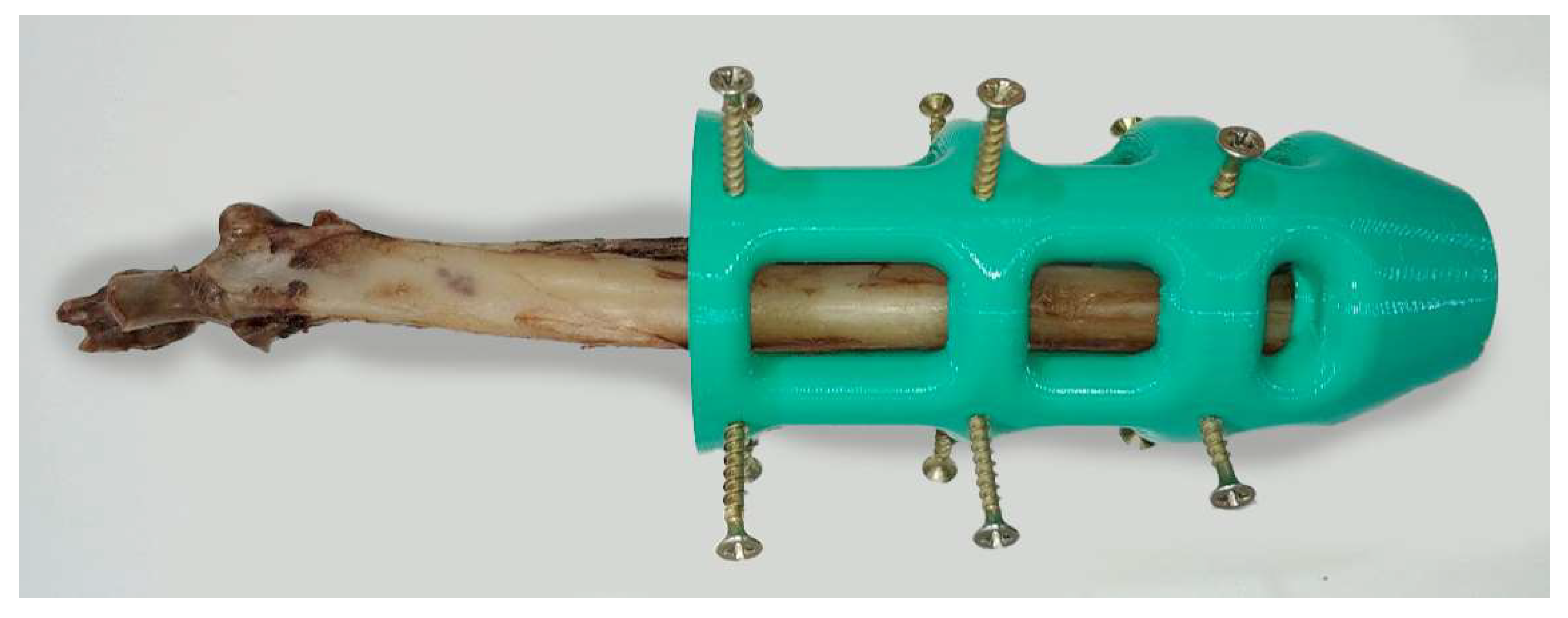
2.4. Preparation of the Endoprosthesis–Radius Construct
2.5. Mechanical Testing
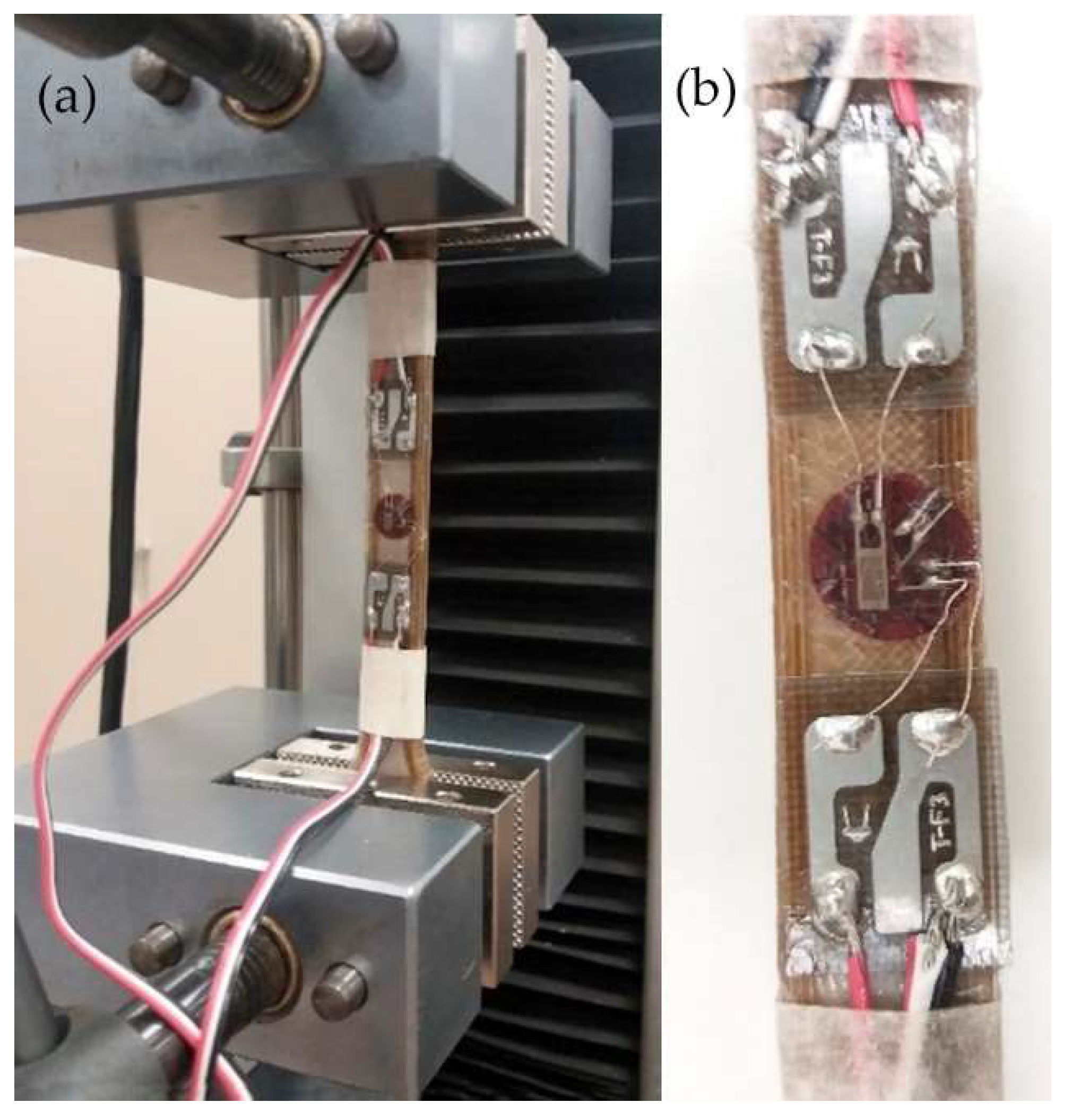
2.5.1. Mechanical Characterization of 3D-Printed PEEK
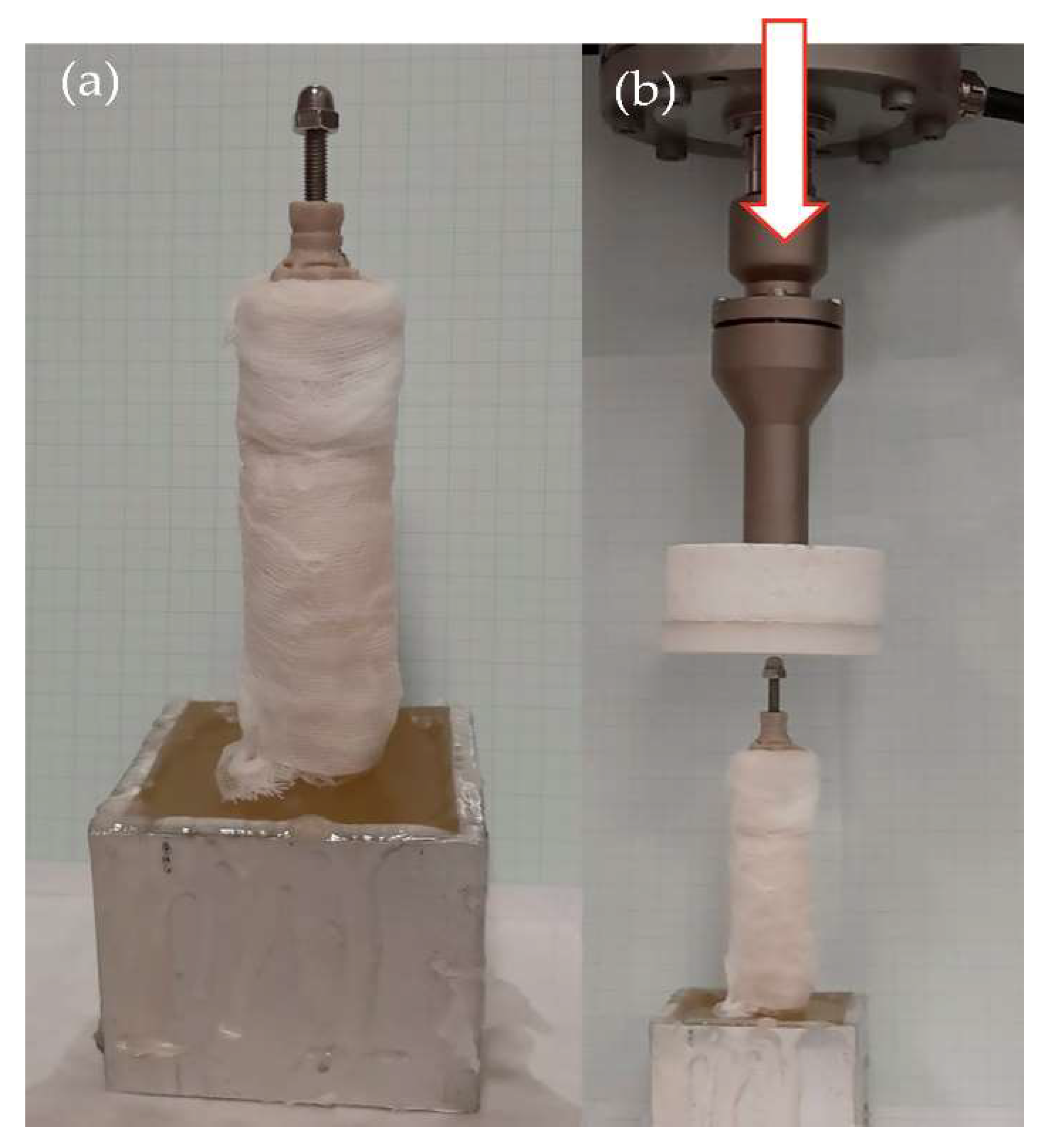
2.5.2. Quasi-Static Mechanical Testing of the Endoprosthesis–Radius Construct
2.5.3. Fatigue Compression Test of the Endoprosthesis–Radius Construct
2.6. Statistical Analysis
3. Results
3.1. Mechanical Testing
3.1.1. Mechanical Characterization of 3D-Printed PEEK Samples
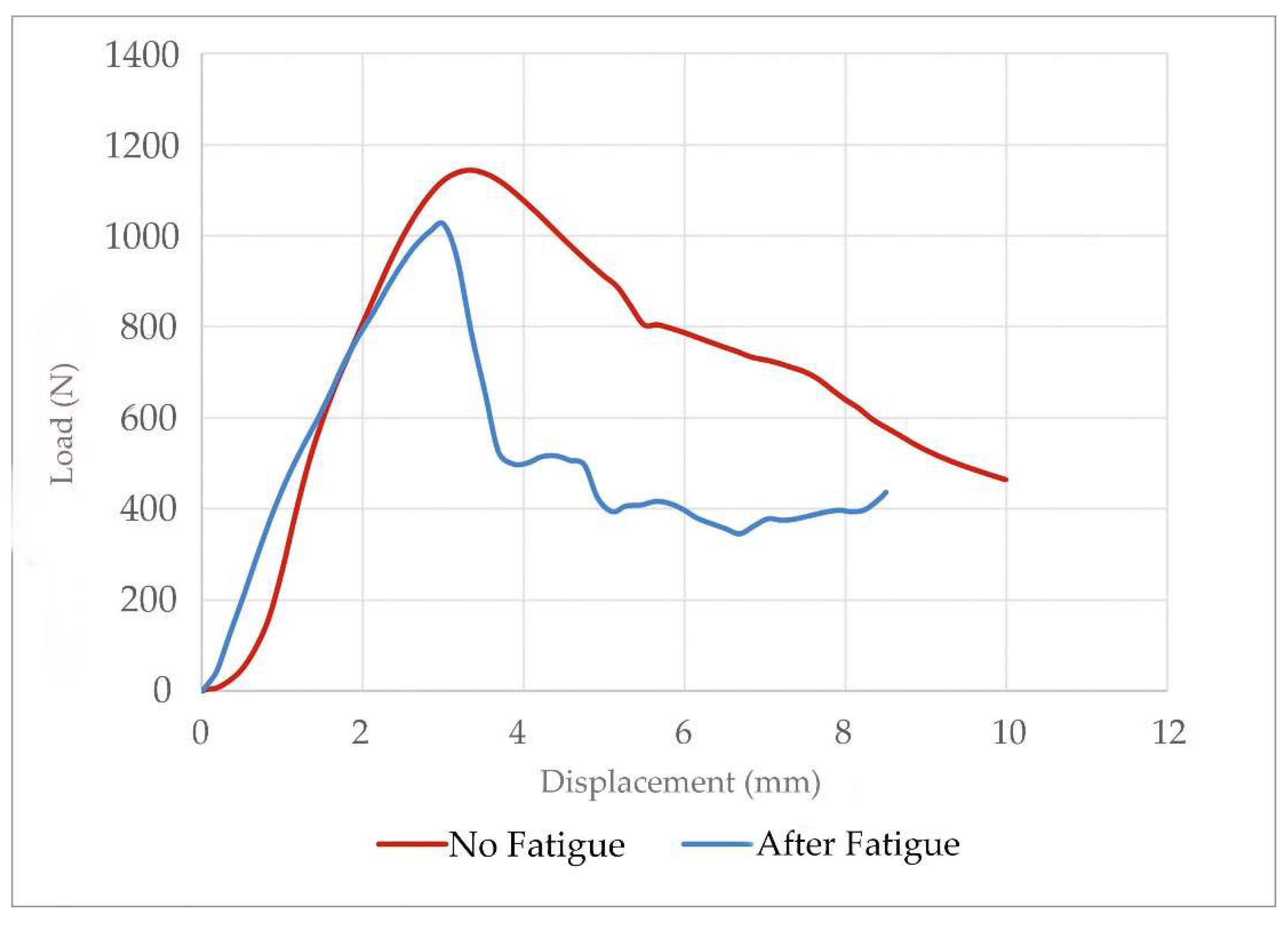
3.1.2. Quasi-Static Vs Fatigue Compression Test of Endoprosthesis–Radius Construct
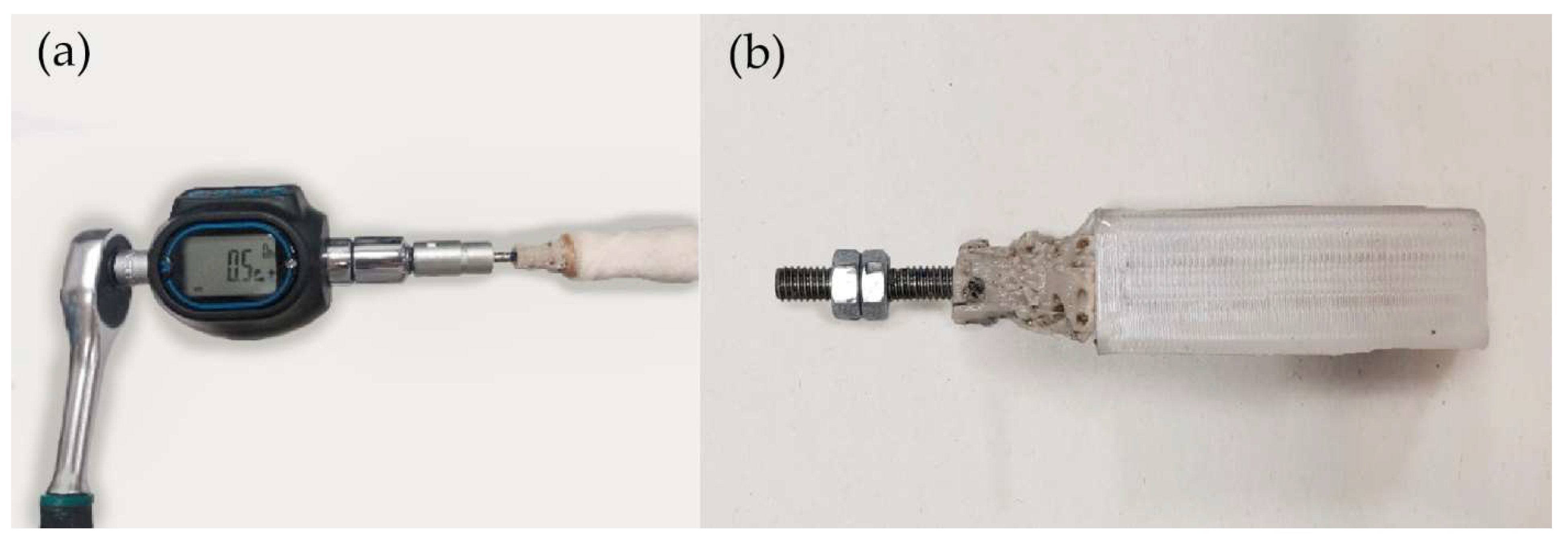
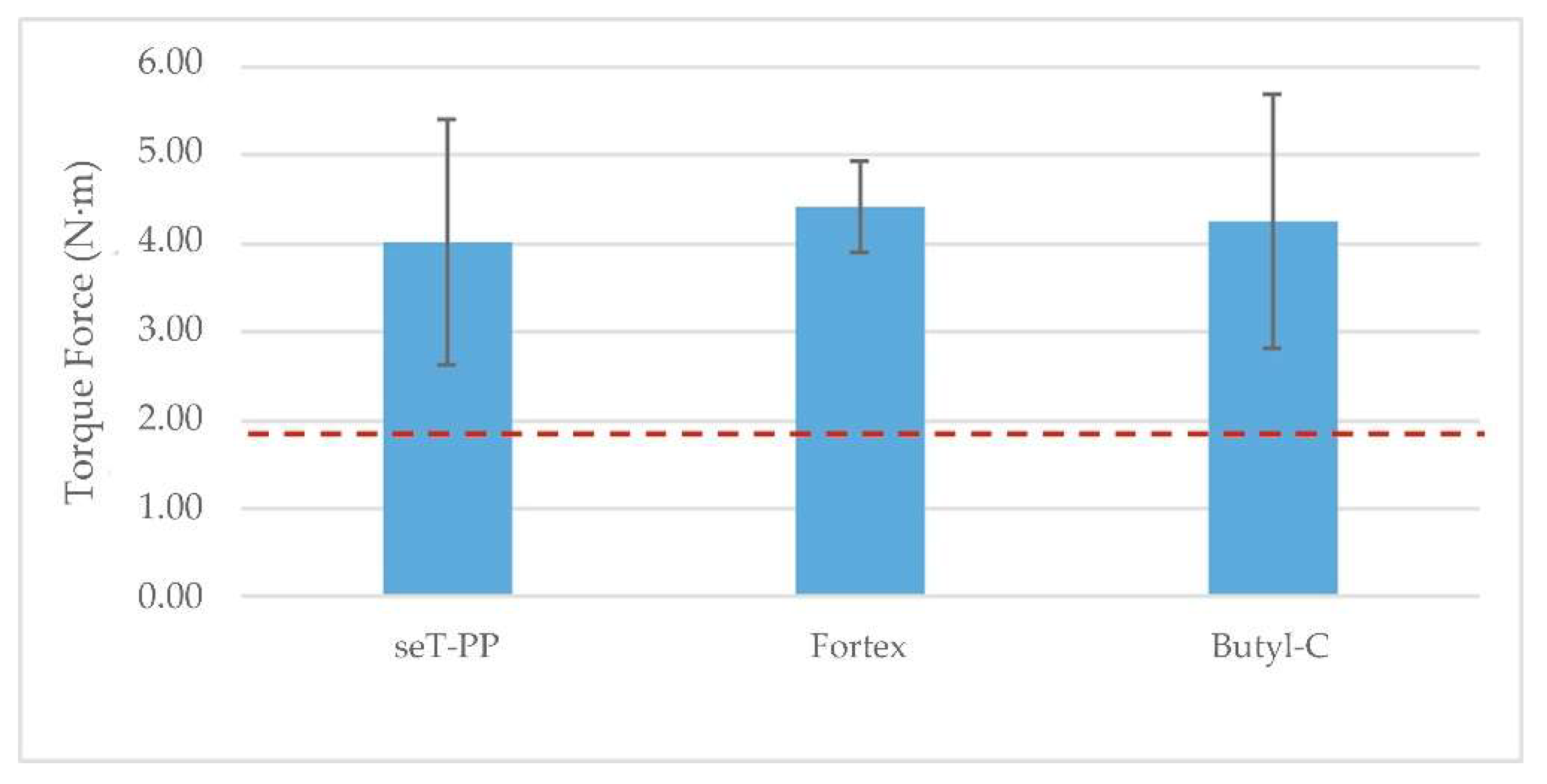
3.2. Torque Test of the Endoprosthesis–Radius Construct
4. Discussion
5. Conclusions
6. Patents
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cole, G.; Millis, D. The effect of limb amputation on standing weight distribution in the remaining three limbs in dogs. Vet. Comp. Orthop. Traumatol. 2017, 30, 59–61. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kirpensteijn, J.; van den Bos, R.; van den Brom, W.E.; Hazewinkel, H.A.W. Ground reaction force analysis of large breed dogs when walking after the amputation of a limb. Vet. Rec. 2000, 146, 155–159. [Google Scholar] [CrossRef] [PubMed]
- Brady, R.B.; Sidiropoulos, A.N.; Bennett, H.J.; Rider, P.M.; Marcellin-Little, D.J.; DeVita, P. Evaluation of gait-related variables in lean and obese dogs at a trot. Am. J. Vet. Res. 2013, 74, 757–762. [Google Scholar] [CrossRef] [PubMed]
- Fuchs, A.; Goldner, B.; Nolte, I.; Schilling, N. Ground reaction force adaptations to tripedal locomotion in dogs. Vet. J. 2014, 201, 307–315. [Google Scholar] [CrossRef]
- Jarvis, S.L.; Worley, D.R.; Hogy, S.M.; Hill, A.E.; Haussler, K.K.; Reiser, R.F. Kinematic and kinetic analysis of dogs during trotting after amputation of a thoracic limb. Am. J. Vet. Res. 2013, 74, 1155–1163. [Google Scholar] [CrossRef] [Green Version]
- Dickerson, V.M.; Coleman, K.D.; Ogawa, M.; Saba, C.F.; Cornell, K.K.; Radlinsky, M.G.; Schmiedt, C.W. Outcomes of dogs undergoing limb amputation, owner satisfaction with limb amputation procedures, and owner perceptions regarding postsurgical adaptation: 64 cases (2005–2012). J. Am. Vet. Med. Assoc. 2015, 247, 786–792. [Google Scholar] [CrossRef] [PubMed]
- Wendland, T.M.; Seguin, B.S.; Duerr, F.M. Retrospective multi-center analysis of canine socket prostheses for partial limbs. Front. Vet. Sci. 2019, 6, 100. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Phillips, A.; Kulendra, E.; Bishop, E.; Monk, M.; Parsons, K.; House, A. Clinical outcome and complications of thoracic and pelvic limb stump and socket prostheses. Vet. Comp. Orthop. Traumatol. 2017, 30, 265–271. [Google Scholar]
- Desrochers, A.; St-Jean, G.; Anderson, D.E. Limb amputation and prosthesis. Vet. Clin. N. Am. Food Anim. Pract. 2014, 30, 143–155. [Google Scholar] [CrossRef]
- DeVasConCellos, P.; Balla, V.K.; Bose, S.; Fugazzi, R.; Dernell, W.S.; Bandyopadhyay, A. Patient specific implants for amputation prostheses: Design, manufacture and analysis. Vet. Comp. Orthop. Traumatol. 2012, 25, 286–296. [Google Scholar] [CrossRef] [Green Version]
- Drygas, K.A.; Taylor, R.; Sidebotham, C.G.; Hugate, R.R.; Mcalexander, H. Transcutaneous tibial implants: A surgical procedure for restoring ambulation after amputation of the distal aspect of the tibia in a dog. Vet. Surg. 2008, 37, 322–327. [Google Scholar] [CrossRef] [PubMed]
- Fitzpatrick, N.; Smith, T.J.; Pendegrass, C.J.; Yeadon, R.; Ring, M.; Goodship, A.E.; Blunn, G.W. Intraosseous transcutaneous amputation prosthesis (ITAP) for limb salvage in 4 dogs. Vet. Surg. 2011, 40, 909–925. [Google Scholar] [CrossRef] [PubMed]
- Farrell, B.J.; Prilutsky, B.I.; Kistenberg, R.S.; Dalton, J.F.; Pitkin, M. An animal model to evaluate skin–implant–bone integration and gait with a prosthesis directly attached to the residual limb. Clin. Biomech. 2014, 29, 336–349. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Golachowski, A.; Al Ghabri, M.R.; Golachowska, B.; Al Abri, H.; Lubak, M.; Sujeta, M. Implantation of an intraosseous transcutaneous amputation prosthesis restoring ambulation after amputation of the distal aspect of the left tibia in an Arabian Tahr (Arabitragus Jayakari). Front. Vet. Sci. 2019, 6, 182. [Google Scholar] [CrossRef]
- Atzeni, E.; Salmi, A. Economics of additive manufacturing for end-usable metal parts. Int. J. Adv. Manuf. Technol. 2012, 62, 1147–1155. [Google Scholar] [CrossRef]
- Hopkinson, N.; Dicknes, P. Analysis of rapid manufacturing—Using layer manufacturing processes for production. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2003, 217, 31–39. [Google Scholar] [CrossRef] [Green Version]
- Salmi, M. Additive manufacturing processes in medical applications. Materials 2021, 14, 191. [Google Scholar] [CrossRef]
- Wong, J.Y.; Pfahnl, A.C. 3D printing of surgical instruments for long-duration space missions. Aviat. Space Environ. Med. 2014, 85, 758–763. [Google Scholar] [CrossRef]
- Kurtz, S.M. (Ed.) PEEK Biomaterials Handbook, 2nd ed.; Elsevier: Amsterdam, The Netherlands, 2019; ISBN 978-0-12-812524-3. [Google Scholar]
- Mendaza-DeCal, R.; Ballesteros, Y.; Peso-Fernandez, S.; Paz, E.; del Real-Romero, J.C.; Rodriguez-Quiros, J. Biomechanical test of a new endoprosthesis for cylindrical medullary canals in dogs. Front. Vet. Sci. 2022, 9, 887676. [Google Scholar] [CrossRef]
- Gordeev, E.G.; Galushko, A.S.; Ananikov, V.P. Improvement of quality of 3D printed objects by elimination of microscopic structural defects in fused deposition modeling. PLoS ONE 2018, 13, e0198370. [Google Scholar] [CrossRef]
- Vaezi, M.; Yang, S. Extrusion-based additive manufacturing of PEEK for biomedical applications. Virtual Phys. Prototyp. 2015, 10, 123–135. [Google Scholar] [CrossRef]
- Wu, W.Z.; Geng, P.; Zhao, J.; Zhang, Y.; Rosen, D.W.; Zhang, H.B. Manufacture and thermal deformation analysis of semicrystalline polymer polyether ether ketone by 3D printing. Mater. Res. Innov. 2014, 18, S5-12–S5-16. [Google Scholar] [CrossRef]
- Arif, M.F.; Kumar, S.; Varadarajan, K.M.; Cantwell, W.J. Performance of biocompatible PEEK processed by fused deposition additive manufacturing. Mater. Des. 2018, 146, 249–259. [Google Scholar] [CrossRef]
- Evans, N.T.; Torstrick, F.B.; Lee, C.S.D.; Dupont, K.M.; Safranski, D.L.; Chang, W.A.; Macedo, A.E.; Lin, A.S.P.; Boothby, J.M.; Whittingslow, D.C.; et al. High-strength, surface-porous polyether-ether-ketone for load-bearing orthopedic implants. Acta Biomater. 2015, 13, 159–167. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sumner, D.R. Long-term implant fixation and stress-shielding in total hip replacement. J. Biomech. 2015, 48, 797–800. [Google Scholar] [CrossRef] [PubMed]
- Glassman, A.H.; Bobyn, J.D.; Tanzer, M. New femoral designs: Do they influence stress shielding? Clin. Orthop. 2006, 453, 64–74. [Google Scholar] [CrossRef] [PubMed]
- Turner, T.M.; Sumner, D.R.; Urban, R.M.; Igloria, R.; Galante, J.O. Maintenance of proximal cortical bone with use of a less stiff femoral component in hemiarthroplasty of the hip without cement: An investigation in a canine model at six months and two years. J. Bone Joint Surg. Am. 1997, 79, 1381–1390. [Google Scholar] [CrossRef]
- Harvey, E.J.; Bobyn, J.D.; Tanzer, M.; Stackpool, G.J.; Krygier, J.J.; Hacking, S.A. Effect of flexibility of the femoral stem on bone-remodeling and fixation of the stem in a canine total hip arthroplasty model without cement. J. Bone Jt. Surg. 1999, 81, 93–107. [Google Scholar] [CrossRef]
- Aikawa, T.; Miyazaki, Y.; Shimatsu, T.; Iizuka, K.; Nishimura, M. Clinical outcomes and complications after open reduction and internal fixation utilizing conventional plates in 65 distal radial and ulnar fractures of miniature- and toy-breed dogs. Vet. Comp. Orthop. Traumatol. 2018, 31, 214–217. [Google Scholar] [CrossRef]
- Ramírez, J.; Macías, C. Conventional bone plate fixation of distal radius and ulna fractures in toy breed dogs. Aust. Vet. J. 2016, 94, 76–80. [Google Scholar] [CrossRef]
- De Arburn Parent, R.; Benamou, J.; Gatineau, M.; Clerfond, P.; Planté, J. Open reduction and cranial bone plate fixation of fractures involving the distal aspect of the radius and ulna in miniature- and toy-breed dogs: 102 cases (2008–2015). J. Am. Vet. Med. Assoc. 2017, 250, 1419–1426. [Google Scholar] [CrossRef]
- Fischer, M.S.; Lilje, K.E. Dogs in Motion, 2nd ed.; VDH: Paderborn, Germany, 2020; Volume 1, ISBN 978-3-9814339-1-3. [Google Scholar]
- Corbee, R.J.; Maas, H.; Doornenbal, A.; Hazewinkel, H.A.W. Forelimb and hindlimb ground reaction forces of walking cats: Assessment and comparison with walking dogs. Vet. J. 2014, 202, 116–127. [Google Scholar] [CrossRef] [PubMed]
- Walter, R.M.; Carrier, D.R. Ground forces applied by galloping dogs. J. Exp. Biol. 2007, 210, 208–216. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Agostinho, F.S.; Rahal, S.C.; Miqueleto, N.S.M.L.; Verdugo, M.R.; Inamassu, L.R.; El-Warrak, A.O. Kinematic analysis of Labrador Retrievers and Rottweilers trotting on a treadmill. Vet. Comp. Orthop. Traumatol. 2011, 24, 185–191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feeney, L.C.; Lin, C.-F.; Marcellin-Little, D.J.; Tate, A.R.; Queen, R.M.; Yu, B. Validation of two-dimensional kinematic analysis of walk and sit-to-stand motions in dogs. Am. J. Vet. Res. 2007, 68, 277–282. [Google Scholar] [CrossRef]
- Lorke, M.; Willen, M.; Lucas, K.; Beyerbach, M.; Wefstaedt, P.; Murua Escobar, H.; Nolte, I. Comparative kinematic gait analysis in young and old Beagle dogs. J. Vet. Sci. 2017, 18, 521. [Google Scholar] [CrossRef]
- Angle, T.; Gillette, R.; Weimar, W. Kinematic analysis of maximal movement initiation in greyhounds. Aust. Vet. J. 2012, 90, 60–68. [Google Scholar] [CrossRef]
- Pfau, T.; Garland de Rivaz, A.; Brighton, S.; Weller, R. Kinetics of jump landing in agility dogs. Vet. J. 2011, 190, 278–283. [Google Scholar] [CrossRef]
- Krotscheck, U.; Todhunter, R.J.; Nelson, S.A.; Sutter, N.B.; Mohammed, H.O. Precision and accuracy of ground reaction force normalization in a heterogeneous population of dogs: Ground reaction force normalization. Vet. Surg. 2014, 43, 437–445. [Google Scholar] [CrossRef]
- Easley, J.; Puttlitz, C.; Broomfield, C.; Palmer, R.; Jones, A.; McGilvray, K.C. Biomechanical and histological assessment of a polyethylene terephthalate screw retention technology in an ovine metatarsal fracture model. Vet. Comp. Orthop. Traumatol. 2020, 33, 153–160. [Google Scholar] [CrossRef]
- Schmierer, P.A.; Smolders, L.A.; Zderic, I.; Gueorguiev, B.; Pozzi, A.; Knell, S.C. Biomechanical properties of plate constructs for feline ilial fracture gap stabilization. Vet. Surg. 2019, 48, 88–95. [Google Scholar] [CrossRef] [PubMed]
- Sammarco, G.J.; Burstein, A.H.; Davis, W.L.; Frankel, V.H. The biomechanics of torsional fractures: The effect of loading on ultimate properties. J. Biomech. 1971, 4, 113–117. [Google Scholar] [CrossRef]
- Mendaza De Cal, R.M.; Peso Fernández, S.; Rodríguez Quirós, J. Endoprótesis a Medida para Huesos Largos de. Animals. Patent No. ES2736410B2, 11 March 2020. [Google Scholar]
- Brianza, S.Z.M.; Delise, M.; Maddalena Ferraris, M.; D’Amelio, P.; Botti, P. Cross-sectional geometrical properties of distal radius and ulna in large, medium and toy breed dogs. J. Biomech. 2006, 39, 302–311. [Google Scholar] [CrossRef] [PubMed]
- Mendaza-DeCal, R.; Peso-Fernández, S.; Rodríguez-Quirós, J. Test of designing and manufacturing a polyether ether ketone endoprosthesis for canine extremities by 3D printing. Front. Mech. Eng. 2021, 7, 693436. [Google Scholar] [CrossRef]
- Kemp, T.J.; Bachus, K.N.; Nairn, J.A.; Carrier, D.R. Functional trade-offs in the limb bones of dogs selected for running versus fighting. J. Exp. Biol. 2005, 208, 3475–3482. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carter, D.R.; Smith, D.J.; Spengler, D.M.; Daly, C.H.; Frankel, V.H. Measurement and analysis of in vivo bone strains on the canine radius and ulna. J. Biomech. 1980, 13, 27–38. [Google Scholar] [CrossRef]
- McGuire, M.F. Stainless Steels for Design Engineers; Kaufman, J.G., Ed.; ASM International: Materials Park, OH, USA, 2008; ISBN 978-0-87170-717-8. [Google Scholar]
- Dewidar, M.M.; Yoon, H.-C.; Lim, J.K. Mechanical properties of metals for biomedical applications using powder metallurgy process: A review. Met. Mater. Int. 2006, 12, 193–206. [Google Scholar] [CrossRef]
- Geetha, M.; Singh, A.K.; Asokamani, R.; Gogia, A.K. Ti based biomaterials, the ultimate choice for orthopaedic implants—A review. Prog. Mater. Sci. 2009, 54, 397–425. [Google Scholar] [CrossRef]
- Niinomi, M. Mechanical properties of biomedical titanium alloys. Mater. Sci. Eng. A 1998, 243, 231–236. [Google Scholar] [CrossRef]
- Walter, R.M.; Carrier, D.R. Rapid acceleration in dogs: Ground forces and body posture dynamics. J. Exp. Biol. 2009, 212, 1930–1939. [Google Scholar] [CrossRef] [Green Version]
- Voss, K.; Wiestner, T.; Galeandro, L.; Hässig, M.R.; Montavon, P.M. Effect of dog breed and body conformation on vertical ground reaction forces, impulses, and stance times. Vet. Comp. Orthop. Traumatol. 2011, 24, 106–112. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Zheng, M.; Chen, R.; Cheng, H. Proper selection of contemporary dental cements. Oral Health Dent. Manag. 2014, 13, 7. [Google Scholar]
- Katti, D.; Krishnamurti, N. Anionic polymerization of alkyl cyanoacrylates: In vitro model studies for in vivo applications. J. Appl. Polym. Sci. 1999, 74, 336–344. [Google Scholar] [CrossRef]
- Najeeb, S.; Mali, M.; Syed, A.U.Y.; Zafar, M.S.; Khurshid, Z.; Alwadaani, A.; Matinlinna, J.P. Dental implants materials and surface treatments. In Advanced Dental Biomaterials; Elsevier: Kidlington, UK, 2019; pp. 581–598. ISBN 978-0-08-102476-8. [Google Scholar]
- Bayer, I.S. Nanostructured cyanoacrylates: Biomedical applications. In Smart Nanoparticles for Biomedicine; Elsevier: Amsterdam, The Netherlands, 2018; pp. 65–81. ISBN 978-0-12-814156-4. [Google Scholar]
- Alarcon, R.T.; Gaglieri, C.; dos Santos, G.C.; Roldao, J.C.; Magdalena, A.G.; da Silva-Filho, L.C.; Bannach, G. A Deep investigation into the thermal degradation of urethane dimethacrylate polymer. J. Therm. Anal. Calorim. 2022, 147, 3083–3097. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of models for each printing | 2 | |
| Extrusion multiplier | 0.92 | |
| Retraction distance (mm) | 3.60 | |
| Retraction speed (mm/s) | 30 | |
| Layer height (mm) | 0.05 | |
| Top solid layers | 9 | |
| Bottom solid layers | 9 | |
| Perimeter shells | 4 | |
| Skirt | Layer | 1 |
| Skirt offset from part (mm) | 0.00 | |
| Skirt outlines | 15 | |
| Infill (%) | 50 | |
| Speed | Default (mm/s) | 30 |
| Outline under speed (%) | 50 | |
| Solid infill under speed (%) | 80 | |
| Supports under speed (%) | 80 | |
| Material | Tensile Strength (MPa) | Young’s Modulus (GPa) | Poisson’s Ratio |
|---|---|---|---|
| 3D-printed PEEK (experimental) | 36–52 [20] | 2.1–2.9 [20] | 0.37–0.4 |
| Canine radius [48,49] | 190.78–235.26 | 8.64–15.07 | 0.31–0.46 |
| 316L-SS [50,51,52] | 90–1100 | 193–210 | 0.27 |
| Ti alloys [52,53] | 240–1200 | 88.5–155.9 | 0.33–0.35 |
| Maximum Force (N) | |
|---|---|
| Quasi-static compression | 1045.0 ± 78.0 |
| Quasi-static compression after fatigue | 1079.5 ± 40.1 |
| MSE | 30,333.2 |
| Butyl-Cyanoacrylate | Maximum Torque (N·m) |
|---|---|
| Throughout threaded rod | 0.30 ± 0.08 a |
| At the end of threaded rod | 0.73 ± 0.14 b |
| MSE | 0.06 |
| Application Area | Maximum Torque (N·m) |
|---|---|
| Threaded rod | 0.73 ± 0.10 a |
| PEEK part | 1.86 ± 0.09 b |
| MSE | 0.04 |
| Failure Type | Affected Sample Groups |
|---|---|
| Breakage of PEEK at umbrella–stem | PEEK part * Resin cement |
| Spinning of the threaded rod | Resin cement Zinc oxyphosphate cement Butyl-cyanoacrylate |
| Breakage of the threaded rod | Resin cement Zinc oxyphosphate cement Butyl-cyanoacrylate |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mendaza-DeCal, R.; Ballesteros, Y.; Peso-Fernandez, S.; del Real-Romero, J.C.; Rodriguez-Quiros, J. Biomechanical Tests on Long-Bone Elliptical Medullary-Canal Endoprostheses for Limb Salvage in Dogs. Animals 2022, 12, 3021. https://doi.org/10.3390/ani12213021
Mendaza-DeCal R, Ballesteros Y, Peso-Fernandez S, del Real-Romero JC, Rodriguez-Quiros J. Biomechanical Tests on Long-Bone Elliptical Medullary-Canal Endoprostheses for Limb Salvage in Dogs. Animals. 2022; 12(21):3021. https://doi.org/10.3390/ani12213021
Chicago/Turabian StyleMendaza-DeCal, Rosa, Yolanda Ballesteros, Salvador Peso-Fernandez, Juan Carlos del Real-Romero, and Jesus Rodriguez-Quiros. 2022. "Biomechanical Tests on Long-Bone Elliptical Medullary-Canal Endoprostheses for Limb Salvage in Dogs" Animals 12, no. 21: 3021. https://doi.org/10.3390/ani12213021