
Development of an Artificial Neural Network for the Detection of Supporting Hindlimb Lameness: A Pilot Study in Working Dogs

 , , , and
, , , and
Abstract
:Simple Summary
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials, Methods and Results
2.1. Instrumentation
2.2. Dogs
2.3. Procedure
2.3.1. Neural Network
Design
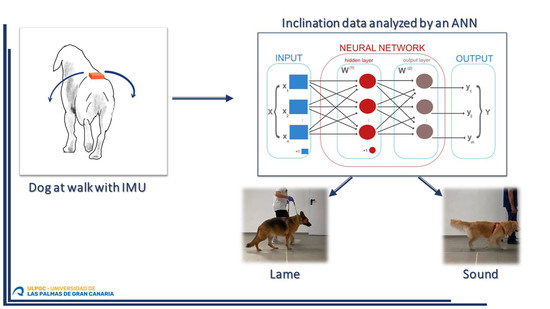
- Number of inputs: 1. The sequence of consecutive data was set to 250 as a single input.
- LSTM layers: 2.
- Dropout: 50%. This technique randomly “freezes” a determined number of neurons (in our case 50%) so that these neurons are ignored during the updating parameters phase. This produces neurons that are still working and are more relevant, highlighting slight changes in the training data and improving the network’s ability to generalize data. As mentioned before, this technique was used exclusively during the training phase [20].
- Number of outputs: 2. Since the network output may be any numerical value, it has been normalized using a sigmoid function, giving a 0 value for sound dogs and a 1 value for lame dogs. For the final diagnosis of sound or lame, the LSTM network is complemented with a traditional ANN, known as the Fully Connected Layer (FCL).
- Number of neurons in each cell: 256. As is usual in many artificial neural networks, this parameter was obtained empirically. We chose a starting power value of 2, and through an intensive battery of tests, we chose the value that offered the best results while maintaining a reasonable computational cost.
Training
Verification with Blind Data and Improvements
2.3.2. Web Application
Elements and User Roles
- − The sessions, which follow the dog’s lameness
- − The trials, three from each dog, with the IMU fixed to each dog’s lower spine. Sensory data were synchronized with video recordings for a simultaneous visualization of the graphics and the dynamic of each dog.
Architecture
Database Design
Data Storage
User Interface
Server
Client
3. Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hicks, D.A.; Millis, D. Kinetic and kinematic evaluation of compensatory movements of the head, pelvis and thoracolumbar spine associated with asymmetric weight bearing of the pelvic limbs in trotting dogs. Vet. Comp. Orthop. Traumatol. 2014, 27, 453–460. [Google Scholar] [PubMed]
- Lopez, S.; Vilar, J.M.; Rubio, M.; Sopena, J.J.; Damia, E.; Chicharro, D.; Santana, A.; Carrillo, J. Center of pressure limb path differences for the detection of lameness in dogs: A preliminary study. BMC Vet. Res. 2019, 15, 138. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gomez Alvarez, C.B.; Gustas, P.; Bergh, A.; Rhodin, M. Vertical head and pelvic movement symmetry at the trot in dogs with induced supporting limb lameness. Vet. J. 2017, 229, 13–18. [Google Scholar] [CrossRef] [PubMed]
- Hagen, J.; Geburek, F.; Kathrinaki, V.; Naem, M.A.; Roecken, M.; Hoffmann, J. Effect of perineural anesthesia on the centre of pressure (COP) path during stance phase at trot in sound horses. J. Equine Vet. Sci. 2021, 101, 103429. [Google Scholar] [CrossRef]
- Keegan, K.G.; Kramer, J.; Yonezawa, Y.; Maki, H.; Pai, P.F.; Dent, E.V.; Kellerman, T.E.; Wilson, D.A.; Reed, S.K. Assessment of repeatability of a wireless, inertial sensor-based lameness evaluation system for horses. Am. J. Vet. Res. 2011, 72, 1156–1163. [Google Scholar] [CrossRef]
- Starke, S.D.; Willems, E.; May, S.A.; Pfau, T. Vertical head and trunk movement adaptations of sound horses trotting in a circle on a hard surface. Vet. J. 2012, 193, 73–80. [Google Scholar] [CrossRef]
- Lopes, M.A.F.; Nichols, J.T.; Dearo, A.C.O.; Nelson, S.R. Effects of forelimb instrumentation on lameness detection in horses using a portable inertial sensor-based system. J. Am. Vet. Med. Assoc. 2021, 259, 892–898. [Google Scholar] [CrossRef]
- Rhodin, M.; Bergh, A.; Gustas, P.; Gomez Alvarez, C.B. Inertial sensor-based system for lameness detection in trotting dogs with induced lameness. Vet. J. 2017, 222, 54–59. [Google Scholar] [CrossRef] [Green Version]
- Kaler, J.; Mitsch, J.; Vázquez-Diosdado, J.A.; Bollard, N.; Dottorini, T.; Ellis, K.A. Automated detection of lameness in sheep using machine learning approaches: Novel insights into behavioral differences among lame and non-lame sheep. R. Soc. Open Sci. 2020, 7, 190824. [Google Scholar] [CrossRef] [Green Version]
- Combalia, M.; Codella, N.; Rotemberg, V.; Carrera, C.; Dusza, S.; Gutman, D.; Helba, B.; Kittler, H.; Kurtansky, N.R.; Liopyris, K.; et al. Validation of artificial intelligence prediction models for skin cancer diagnosis using dermoscopy images: The 2019 international skin imaging collaboration grand challenge. Lancet Digit. Health 2022, 4, e330–e339. [Google Scholar] [CrossRef]
- Romiti, S.; Vinciguerra, M.; Saade, W.; Anso Cortajarena, I.; Greco, E. Artificial intelligence (AI) and cardiovascular diseases: An unexpected alliance. Cardiol. Res. Pract. 2020, 2020, 4972346. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Feng, J.; Wu, Z.; Neo, Z.; Zhu, C.; Zhang, P.; Wang, Y.; Jiang, Y.; Mitsouras, D.; Li, Y. Deep neural network-based detection and segmentation of intracranial aneurysms on 3D rotational DSA. Interv. Neuroradiol. 2021, 27, 648–657. [Google Scholar] [CrossRef] [PubMed]
- Meena, J.; Hasija, Y. Application of explainable artificial intelligence in the identification of Squamous Cell Carcinoma biomarkers. Comput. Biol. Med. 2022, 146, 105505. [Google Scholar] [CrossRef]
- Mata, F.; Johnson, C.; Wilding, L. Cross sectional epidemiological study of the severity of buccal ulceration and sharp enamel points in ridden and unridden horses. J. Appl. Anim. Welf. Sci. 2022, 1–7. [Google Scholar] [CrossRef]
- Tang, K.; Ren, J.; Sun, F. Afann: Bias adjustment for alignment-free sequence comparison based on sequencing data using neural network regression. Genome Biol. 2019, 20, 266. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maler, L. Neural networks: How a multi-layer network learns to disentangle exogenous from self-generated signals. Curr. Biol. 2020, 30, R224–R226. [Google Scholar] [CrossRef]
- Laudani, A.; Lozito, G.M.; Fulginei, F.R.; Salvini, A. On training efficiency and computational costs of a feed forward neural network: A review. Comput. Intell. Neurosci. 2015, 2015, 818243. [Google Scholar] [CrossRef] [Green Version]
- Towardsdatascience. Available online: https://towardsdatascience.com/recognizing-speech-commands-using-recurrent-neural-networks-with-attention-c2b2ba17c837 (accessed on 14 May 2022).
- Goulas, A.; Damicelli, F.; Hilgetag, C.C. Bio-instantiated recurrent neural networks: Integrating neurobiology-based network topology in artificial networks. Neural Netw. 2021, 142, 608–618. [Google Scholar] [CrossRef]
- Liu, X.; Liu, C.; Huang, R.; Zhu, H.; Liu, Q.; Mitra, S.; Wang, Y. Long short-term memory recurrent neural network for pharmacokinetic-pharmacodynamic modeling. Int. J. Clin. Pharmacol. Ther. 2021, 59, 138–146. [Google Scholar] [CrossRef]
- Gupta, H.; Jin, K.H.; Nguyen, H.Q.; McCann, M.T.; Unser, M. CNN-based projected gradient descent for consistent CT image reconstruction. IEEE Trans. Med. Imaging 2018, 37, 1440–1453. [Google Scholar] [CrossRef] [Green Version]
- Kim, K.S.; Choi, Y.S. HyAdamC: A new adam-based hybrid optimization algorithm for convolution neural networks. Sensors 2021, 21, 4054. [Google Scholar] [CrossRef] [PubMed]
- Fairbank, M.; Prokhorov, D.; Alonso, E. Clipping in neurocontrol by adaptive dynamic programming. IEEE Trans. Neural Netw. Learn Syst. 2014, 25, 1909–1920. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fischer, S.; Anders, A.; Nolte, I.; Schilling, N. Compensatory load redistribution in walking and trotting dogs with hind limb lameness. Vet. J. 2013, 197, 746–752. [Google Scholar] [CrossRef] [PubMed]
- Schobesberger, H.; Peham, C. Computerized detection of supporting forelimb lameness in the horse using an artificial neural network. Vet. J. 2002, 163, 77–84. [Google Scholar] [CrossRef]
- Baum, E.; Haussler, D. What size network gives valid generalization. Neural Comput. 1989, 1, 151–160. [Google Scholar] [CrossRef]
- Cuervo, B.; Rubio, M.; Sopena, J.; Dominguez, J.M.; Vilar, J.M.; Morales, M.; Cugat, R.; Carrillo, J.M. Hip osteoarthritis in dogs: A randomized study using mesenchymal stem cells from adipose tissue and plasma rich in growth factors. Int. J. Mol. Sci. 2014, 15, 13437–13460. [Google Scholar] [CrossRef]
- Alaeddine, H.; Jihene, M. Deep residual network in network. Comput. Intell. Neurosci. 2021, 2021, 6659083. [Google Scholar] [CrossRef]
- McCracken, M.J.; Kramer, J.; Keegan, K.G.; Lopes, M.; Wilson, D.A.; Reed, S.K.; Lacarrubba, A.; Rasch, M. Comparison of an inertial sensor system of lameness quantification with subjective lameness evaluation. Equine Vet. J. 2012, 44, 652–656. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Figueirinhas, P.; Sanchez, A.; Rodríguez, O.; Vilar, J.M.; Rodríguez-Altónaga, J.; Gonzalo-Orden, J.M.; Quesada, A. Development of an Artificial Neural Network for the Detection of Supporting Hindlimb Lameness: A Pilot Study in Working Dogs. Animals 2022, 12, 1755. https://doi.org/10.3390/ani12141755
Figueirinhas P, Sanchez A, Rodríguez O, Vilar JM, Rodríguez-Altónaga J, Gonzalo-Orden JM, Quesada A. Development of an Artificial Neural Network for the Detection of Supporting Hindlimb Lameness: A Pilot Study in Working Dogs. Animals. 2022; 12(14):1755. https://doi.org/10.3390/ani12141755
Chicago/Turabian StyleFigueirinhas, Pedro, Adrián Sanchez, Oliver Rodríguez, José Manuel Vilar, José Rodríguez-Altónaga, José Manuel Gonzalo-Orden, and Alexis Quesada. 2022. "Development of an Artificial Neural Network for the Detection of Supporting Hindlimb Lameness: A Pilot Study in Working Dogs" Animals 12, no. 14: 1755. https://doi.org/10.3390/ani12141755