
Ground Reaction Forces and Center of Pressure within the Paws When Stepping over Obstacles in Dogs



Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Ethics
2.2. Animals and Exclusion Criteria
2.3. Equipment
2.4. Measurement Procedure
2.5. Data Analysis
2.5.1. Software
2.5.2. Assignment of the Limbs
Normal Walking
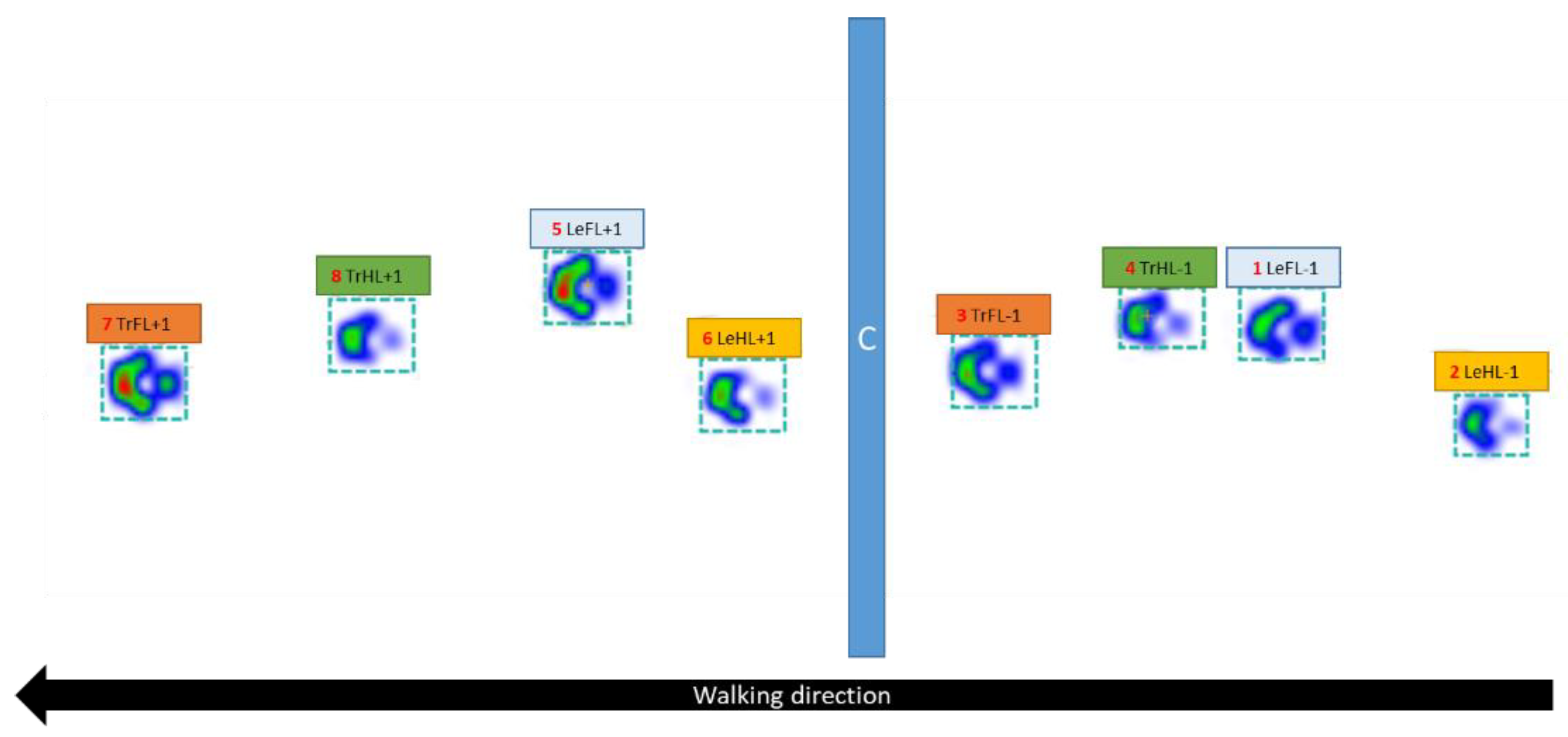
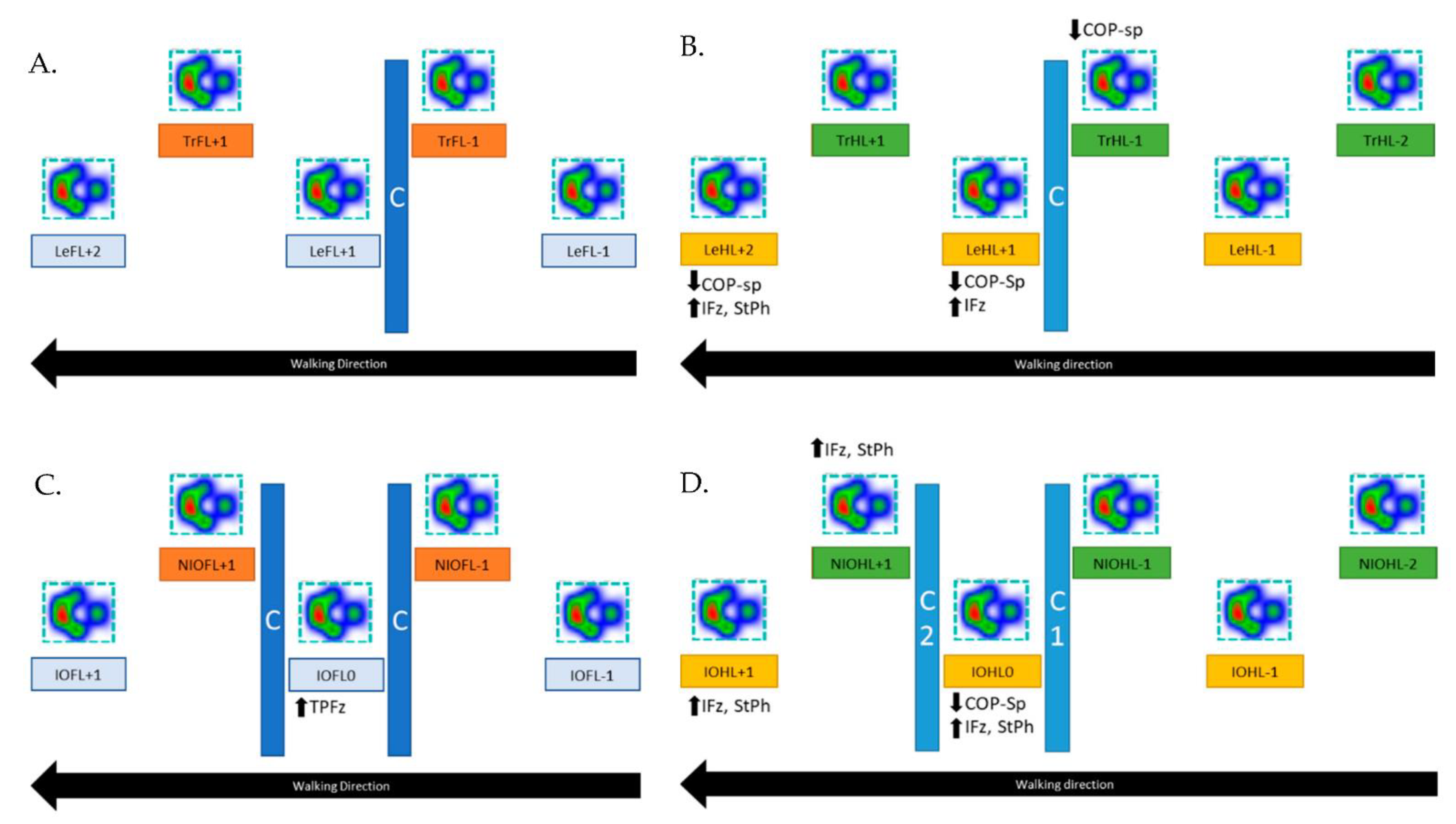
Walking over One Obstacle
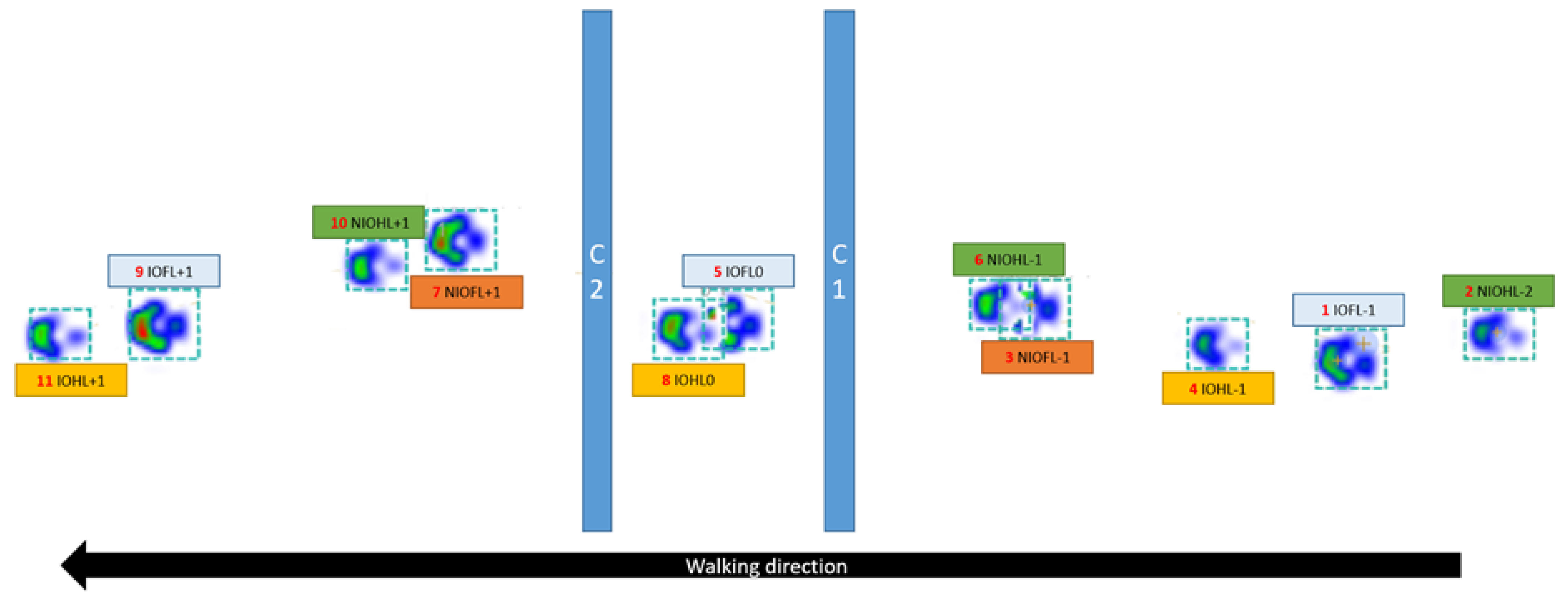
Walking over Two Obstacles
2.6. Parameters under Investigation
- Mean speed (m/s) and acceleration (m/s2), calculated on basis of the left forelimb by the software of the pressure plate;
- Peak vertical force (PFz in N);
- Vertical impulse (IFz in N/s), describing the impulse in the Z-direction;
- ○
- The PFz and the IFz were normalized using the following formula and expressed as %TF:where XFz is the mean value of PFz or IFz of the valid steps, FL is the left forelimb, FR is the right forelimb, HL is the left hindlimb, and HR is the right hindlimb.
- Mean duration of the stance phase (StPh) in seconds;
- Time of occurrence of PFz (TPFz) as a percentage of the stance phase of the respective limb;
- Asymmetry index (ASI):where XFz is the mean value of PFz or IFz of valid steps, HL is the left hindlimb, and HR is the right hindlimb; perfect symmetry between the right and left hindlimbs was assigned a value of 0%.
- Mediolateral and craniocaudal COP displacement: These parameters are the differences between the maximum positive and negative COP values along the mediolateral and craniocaudal axes, respectively. The mediolateral displacement was normalized to the maximum width of the paw contact area (COPmed-lat%), while the craniocaudal displacement was normalized to the maximum length of the paw contact area (COPcran-caud%).
- COP-Area: The COP area is a measurement of the area covered by the COP movement. It was normalized to the paw contact area and expressed as a percentage (COP-Area%).
- COP-Speed: The COP speed is the mean speed of the movement of the COP (COP-Sp, mm/s).
- COP-Radius: The COP radius is the mean distance of all COP points to the center point of all COP points. This parameter was also normalized to the paw contact area and given as a percentage (COP-Radius%).
- Speed and Acceleration: The acceleration and speed when walking over obstacles was calculated on the basis of the left forelimb by the software of the pressure plate.
2.7. Statistical Analysis
3. Results
3.1. Walking over One Obstacle
3.1.1. Forelimbs
3.1.2. Hindlimbs
3.2. Walking over Two Obstacles
3.2.1. Forelimbs
3.2.2. Hindlimbs
3.3. Speed and Acceleration
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
| PFz | IFz | TPFz | Stph | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Limb during Walking over One Obstacle | Limb during Normal Walking | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value |
| LeFL−1 | RFL | 62.28 ± 1.67 | 64.28 ± 1.88 | 0.222 | 21.01 ± 3.69 | 22.84 ± 3.11 | 0.883 | 54.42 ± 11.56 | 50.12 ± 11.09 | 0.975 | 0.47 ± 0.08 | 0.48 ± 0.06 | 0.999 |
| LeFL+1 | 64.71 ± 4.03 | 1.000 | 25.27 ± 3.79 | 0.704 | 55.33 ± 12.32 | 0.948 | 0.54 ± 0.08 | 0.575 | |||||
| LeFL+2 | 64.45 ± 1.79 | 1.000 | 25.94 ± 3.62 | 0.423 | 56.11 ± 14.03 | 0.932 | 0.55 ± 0.08 | 0.349 | |||||
| TrFL−1 | LFL | 64.16 ± 4.21 | 64.45 ± 2.64 | 1.000 | 23.67 ± 3.48 | 22.67 ± 3.12 | 0.992 | 58.13 ± 13.90 | 49.86 ± 11.71 | 0.774 | 0.51 ± 0.08 | 0.48 ± 0.06 | 0.980 |
| TrFL+1 | 65.58 ± 2.17 | 0.936 | 24.57 ± 3.41 | 0.840 | 57.51 ± 5.99 | 0.566 | 0.53 ± 0.08 | 0.696 | |||||
| LeHL−1 | RHL | 36.35 ± 4.33 | 38.01 ± 3.99 | 0.968 | 11.97 ± 1.52 | 12.21 ± 1.06 | 0.999 | 42.48 ± 10.23 | 34.92 ± 6.28 | 0.473 | 0.46 ± 0.08 | 0.45 ± 0.05 | 1.000 |
| LeHL+1 | 36.47 ± 4.03 | 0.973 | 14.14 ± 1.34 | 0.041 * | 35.42 ± 9.37 | 1.000 | 0.53 ± 0.06 | 0.080 | |||||
| LeHL+2 | 32.17 ± 3.06 | 0.269 | 15.56 ± 0.77 | 0.012 * | 37.74 ± 9.10 | 0.998 | 0.63 ± 0.04 | 0.015 * | |||||
| TrHL−2 | LHL | 36.24 ± 4.20 | 38.14 ± 4.47 | 0.952 | 12.34 ± 1.19 | 12.29 ± 0.85 | 1.000 | 37.62 ± 10.51 | 35.68 ± 7.24 | 0.999 | 0.47 ± 0.07 | 0.45 ± 0.05 | 0.999 |
| TrHL−1 | 36.14 ± 4.22 | 0.939 | 13.57 ± 1.75 | 0.438 | 35.84 ± 5.88 | 1.000 | 0.52 ± 0.08 | 0.240 | |||||
| TrHL+1 | 35.68 ± 3.82 | 0.830 | 13.26 ± 0.95 | 0.263 | 41.04 ± 12.74 | 0.904 | 0.51 ± 0.06 | 0.322 | |||||
| COP Med-Lat% | COP Cran-Caud% | COP-Area% | COP-Radius% | COP-Sp | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Limb during Walking over One Obstacle | Limb during Normal Walking | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value |
| LeFL−1 | RFL | 6.77 ± 3.53 | 6.81 ± 2.56 | 1.000 | 23.32 ± 3.62 | 23.01 ± 2.51 | 1.000 | 1.04 ± 0.40 | 1.04 ± 0.31 | 1.000 | 0.10 ± 0.02 | 0.10 ± 0.01 | 1.000 | 69.23 ± 9.44 | 66.31 ± 7.07 | 0.984 |
| LeFL+1 | 8.14 ± 3.33 | 0.947 | 22.24 ± 3.19 | 0.996 | 1.17 ± 0.32 | 0.967 | 0.10 ± 0.01 | 1.000 | 62.93 ± 8.12 | 0.949 | ||||||
| LeFL+2 | 7.05 ± 2.79 | 1.000 | 22.30 ± 4.45 | 0.999 | 1.08 ± 0.34 | 1.000 | 0.10 ± 0.02 | 0.991 | 57.55 ± 4.75 | 0.075 | ||||||
| TrFL−1 | LFL | 6.72 ± 2.60 | 6.78 ± 2.62 | 1.000 | 21.03 ± 2.19 | 23.74 ± 3.95 | 0.528 | 0.94 ± 0.31 | 0.94 ± 0.25 | 1.000 | 0.09 ± 0.02 | 0.10 ± 0.02 | 0.835 | 61.57 ± 6.92 | 66.82 ± 9.63 | 0.797 |
| TrFL+1 | 8.13 ± 2.70 | 0.906 | 21.31 ± 2.27 | 0.648 | 1.27 ± 0.32 | 0.195 | 0.09 ± 0.01 | 0.923 | 62.27 ± 6.59 | 0.873 | ||||||
| LeHL−1 | RHL | 6.20 ± 1.39 | 5.85 ± 1.46 | 0.998 | 17.02 ± 3.00 | 18.70 ± 3.02 | 0.864 | 0.76 ± 0.27 | 0.85 ± 0.28 | 0.989 | 0.09 ± 0.01 | 0.11 ± 0.02 | 0.501 | 56.81 ± 4.67 | 58.99 ± 6.51 | 0.974 |
| LeHL+1 | 5.99 ± 1.70 | 1.000 | 17.39 ± 2.25 | 0.921 | 0.79 ± 0.34 | 0.999 | 0.10 ± 0.01 | 0.777 | 47.42 ± 4.23 | 0.007 * | ||||||
| LeHL+2 | 7.00 ± 2.18 | 0.978 | 18.64 ± 2.11 | 1.000 | 0.93 ± 0.26 | 0.999 | 0.09 ± 0.01 | 0.369 | 46.07 ± 3.00 | 0.012 * | ||||||
| TrHL−2 | LHL | 6.83 ± 1.75 | 6.07 ± 1.80 | 0.958 | 18.87 ± 2.91 | 18.30 ± 2.38 | 0.999 | 0.90 ± 0.35 | 0.80 ± 0.24 | 0.990 | 0.10 ± 0.02 | 0.10 ± 0.01 | 1.000 | 58.01 ± 6.36 | 57.08 ± 4.28 | 1.000 |
| TrHL−1 | 6.34 ± 1.24 | 1.000 | 17.16 ± 2.76 | 0.950 | 0.74 ± 0.27 | 0.998 | 0.10 ± 0.02 | 1.000 | 49.20 ± 4.80 | 0.023 * | ||||||
| TrHL+1 | 6.45 ± 1.62 | 0.999 | 19.61 ± 2.44 | 0.878 | 0.99 ± 0.36 | 0.799 | 0.10 ± 0.01 | 1.000 | 55.71 ± 4.81 | 0.993 | ||||||
| PFz | IFz | TPFz | StPh | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Limb during Walking Over Two Obstacles | Limb during Normal Walking | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value |
| IOFL−1 | RFL | 62.60 ± 1.50 | 64.28 ± 1.88 | 0.347 | 20.53 ± 2.44 | 22.84 ± 3.11 | 0.538 | 56.55 ± 12.19 | 50.12 ± 11.09 | 0.871 | 0.45 ± 0.05 | 0.48 ± 0.06 | 0.923 |
| IOFL0 | 64.65 ± 2.70 | 1.000 | 25.96 ± 2.30 | 0.219 | 67.53 ± 7.49 | 0.018 * | 0.55 ± 0.04 | 0.164 | |||||
| IOFL+1 | 65.71 ± 3.10 | 0.869 | 26.26 ± 3.05 | 0.234 | 58.43 ± 10.26 | 0.602 | 0.55 ± 0.06 | 0.211 | |||||
| NIOFL−1 | LFL | 64.16 ± 2.94 | 64.45 ± 2.64 | 1.000 | 22.79 ± 2.07 | 22.67 ± 3.12 | 1.000 | 60.77 ± 15.32 | 49.86 ± 11.71 | 0.577 | 0.49 ± 0.04 | 0.48 ± 0.06 | 1.000 |
| NIOFL+1 | 64.08 ± 2.17 | 1.000 | 25.77 ± 3.22 | 0.356 | 56.15 ± 9.30 | 0.829 | 0.55 ± 0.06 | 0.214 | |||||
| IOHL−1 | RHL | 36.78 ± 4.67 | 38.01 ± 3.99 | 0.994 | 12.07 ± 1.03 | 12.21 ± 1.06 | 1.000 | 44.13 ± 11.36 | 34.92 ± 6.28 | 0.354 | 0.45 ± 0.05 | 0.45 ± 0.05 | 1.000 |
| IOHL0 | 37.75 ± 5.14 | 1.000 | 15.19 ± 1.66 | 0.007 * | 31.98 ± 6.27 | 0.935 | 0.55 ± 0.07 | 0.030 * | |||||
| IOHL+1 | 35.98 ± 3.30 | 0.866 | 14.09 ± 0.91 | 0.012 | 32.91 ± 8.19 | 0.995 | 0.53 ± 0.04 | 0.018 * | |||||
| NIOHL−2 | LHL | 36.39 ± 4.05 | 38.14 ± 4.47 | 0.964 | 11.89 ± 1.30 | 12.29 ± 0.85 | 0.982 | 34.34 ± 6.65 | 35.68 ± 7.24 | 0.999 | 0.44 ± 0.06 | 0.45 ± 0.05 | 0.999 |
| NIOHL−1 | 35.79 ± 3.39 | 0.832 | 13.52 ± 1.38 | 0.280 | 37.96 ± 6.06 | 0.986 | 0.52 ± 0.06 | 0.144 | |||||
| NIOHL+1 | 36.65 ± 4.81 | 0.989 | 13.90 ± 1.00 | 0.023 * | 31.41 ± 5.81 | 0.767 | 0.53 ± 0.05 | 0.047 * | |||||
| COPmed-lat% | COPcran-caud% | COP-Area% | COP-Radius% | COP-sp | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Limb during Walking over Two Obstacles | Limb during Normal Walking | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value |
| IOFL−1 | RFL | 7.00 ± 3.95 | 6.81 ± 2.56 | 1.00 | 22.00 ± 4.83 | 23.01 ± 2.51 | 0.997 | 0.97 ± 0.51 | 1.04 ± 0.31 | 1.000 | 0.10 ± 0.02 | 0.10 ± 0.01 | 0.998 | 67.72 ± 6.86 | 66.31 ± 7.07 | 0.999 |
| IOFL0 | 8.57 ± 4.55 | 0.932 | 21.57 ± 3.47 | 0.932 | 1.12 ± 0.36 | 0.998 | 0.09 ± 0.02 | 0.777 | 58.96 ± 4.24 | 0.155 | ||||||
| IOFL+1 | 7.82 ± 3.21 | 0.984 | 22.21 ± 3.00 | 0.994 | 1.21 ± 0.41 | 0.937 | 0.10 ± 0.02 | 0.999 | 59.15 ± 6.96 | 0.313 | ||||||
| NIOFL−1 | LFL | 7.33 ± 2.73 | 6.78 ± 2.62 | 0.999 | 19.59 ± 2.58 | 23.74 ± 3.95 | 0.159 | 0.95 ± 0.33 | 0.94 ± 0.25 | 1.000 | 0.08 ± 0.02 | 0.10 ± 0.02 | 0.376 | 60.98 ± 6.71 | 66.82 ± 9.63 | 0.704 |
| NIOFL+1 | 8.74 ± 3.08 | 0.719 | 21.01 ± 2.48 | 0.549 | 1.26 ± 0.34 | 0.275 | 0.09 ± 0.01 | 0.856 | 60.41 ± 6.25 | 0.597 | ||||||
| IOHL−1 | RHL | 6.39 ± 1.55 | 5.85 ± 1.46 | 0.982 | 16.62 ± 1.93 | 18.70 ± 3.02 | 0.560 | 0.77 ± 0.34 | 0.85 ± 0.28 | 0.995 | 0.09 ± 0.01 | 0.11 ± 0.02 | 0.163 | 56.38 ± 7.23 | 58.99 ± 6.51 | 0.976 |
| IOHL0 | 5.80 ± 1.59 | 1.000 | 16.94 ± 2.97 | 0.837 | 0.76 ± 0.26 | 0.984 | 0.10 ± 0.02 | 0.842 | 45.76 ± 5.96 | 0.005 * | ||||||
| IOHL+1 | 6.50 ± 1.83 | 0.972 | 20.07 ± 2.45 | 0.914 | 0.99 ± 0.33 | 0.942 | 0.11 ± 0.02 | 1.000 | 53.20 ± 4.01 | 0.283 | ||||||
| NIOHL−2 | LHL | 6.12 ± 1.98 | 6.07 ± 1.80 | 1.000 | 17.17 ± 2.81 | 18.30 ± 2.38 | 0.954 | 0.86 ± 0.40 | 0.80 ± 0.24 | 1.000 | 0.09 ± 0.02 | 0.10 ± 0.01 | 0.692 | 60.40 ± 9.99 | 57.08 ± 4.28 | 0.957 |
| NIOHL−1 | 6.26 ± 1.64 | 1.000 | 16.01 ± 2.32 | 0.360 | 0.73 ± 0.14 | 0.981 | 0.09 ± 0.01 | 0.648 | 51.18 ± 5.13 | 0.146 | ||||||
| NIOHL+1 | 6.44 ± 1.34 | 0.998 | 18.20 ± 3.03 | 1.000 | 0.88 ± 0.32 | 0.996 | 0.10 ± 0.02 | 0.980 | 50.22 ± 5.80 | 0.107 | ||||||
| Speed | Acceleration | ||||||
|---|---|---|---|---|---|---|---|
| Limb during Walking over One Obstacle | Limb during Normal Walking | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value | Obstacle: Mean ± SD | Normal: Mean ± SD | p-Value |
| TrFL | LFL | 0.94 ± 0.14 | 1.06 ± 0.12 | 0.172 | 0.02 ± 0.03 | 0.01 ± 0.02 | 0.723 |
| Limb during walking over two obstacles | |||||||
| NIOFL | LFL | 0.90 ± 0.10 | 1.06 ± 0.12 | 0.021 * | 0.02 ± 0.02 | 0.01 ± 0.02 | 0.687 |
References
- Alvarez, L.X.; Fox, P.R.; van Dyke, J.B.; Grigsby, P. Survey of referring veterinarians’ perceptions of and reasons for referring patients to rehabilitation facilities. J. Am. Vet. Med. Assoc. 2016, 249, 807–813. [Google Scholar] [CrossRef] [PubMed]
- David, L. Canine Rehabilitation and Physical Therapy, 2nd ed.; Saunders: Philadelphia, PA, USA; London, UK, 2014; ISBN 1455775797. [Google Scholar]
- Bockstahler, B.; Levine, D.; Maierl, J.; Millis, D.; Wittek, K. Essential Facts of Physical Medicine, Rehabilitation and Sports Medicine in Companion Animals, 1st ed.; VBS GmbH: Munich, Germany, 2019; ISBN 978-3-938274-30-9. [Google Scholar]
- Zink, C.; van Dyke, J.B. Canine Sports Medicine and Rehabilitation, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2018; ISBN 9781119380382. [Google Scholar]
- Begg, R.; Sparrow, W.; Lythgo, N. Time-domain analysis of foot–ground reaction forces in negotiating obstacles. Gait Posture 1998, 7, 99–109. [Google Scholar] [CrossRef]
- Bovonsunthonchai, S.; Khobkhun, F.; Vachalathiti, R. Ground Reaction Forces of the Lead and Trail Limbs When Stepping over an Obstacle. Med. Sci. Monit. 2015, 21, 2041–2049. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Malone, A.; Kiernan, D.; French, H.; Saunders, V.; O’Brien, T. Obstacle Crossing During Gait in Children With Cerebral Palsy: Cross-Sectional Study With Kinematic Analysis of Dynamic Balance and Trunk Control. Phys. Ther. 2016, 96, 1208–1215. [Google Scholar] [CrossRef] [Green Version]
- Dever, A.; Powell, D.; Graham, L.; Mason, R.; Das, J.; Marshall, S.J.; Vitorio, R.; Godfrey, A.; Stuart, S. Gait Impairment in Traumatic Brain Injury: A Systematic Review. Sensors 2022, 22, 1480. [Google Scholar] [CrossRef]
- Sinovas-Alonso, I.; Gil-Agudo, Á.; Cano-de-la-Cuerda, R.; Del-Ama, A.J. Walking Ability Outcome Measures in Individuals with Spinal Cord Injury: A Systematic Review. Int. J. Environ. Res. Public Health 2021, 18, 9517. [Google Scholar] [CrossRef]
- Wang, Z.; Chien, J.H.; Siu, K.-C. Stepping over multiple obstacles changes the pattern of foot integrated pressure of the leading and trailing legs. J. Biomech. 2020, 98, 109423. [Google Scholar] [CrossRef]
- Holler, P.J.; Brazda, V.; Dal-Bianco, B.; Lewy, E.; Mueller, M.C.; Peham, C.; Bockstahler, B.A. Kinematic motion analysis of the joints of the forelimbs and hind limbs of dogs during walking exercise regimens. Am. J. Vet. Res. 2010, 71, 734–740. [Google Scholar] [CrossRef]
- Bockstahler, B.A.; Prickler, B.; Lewy, E.; Holler, P.J.; Vobornik, A.; Peham, C. Hind limb kinematics during therapeutic exercises in dogs with osteoarthritis of the hip joints. Am. J. Vet. Res. 2012, 73, 1371–1376. [Google Scholar] [CrossRef]
- Breitfuss, K.; Franz, M.; Peham, C.; Bockstahler, B. Surface Electromyography of the Vastus Lateralis, Biceps Femoris, and Gluteus Medius Muscle in Sound Dogs During Walking and Specific Physiotherapeutic Exercises. Vet. Surg. 2015, 44, 588–595. [Google Scholar] [CrossRef]
- McLean, H.; Millis, D.; Levine, D. Surface Electromyography of the Vastus Lateralis, Biceps Femoris, and Gluteus Medius in Dogs During Stance, Walking, Trotting, and Selected Therapeutic Exercises. Front. Vet. Sci. 2019, 6, 211. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schnabl-Feichter, E.; Tichy, A.; Gumpenberger, M.; Bockstahler, B. Comparison of ground reaction force measurements in a population of Domestic Shorthair and Maine Coon cats. PLoS ONE 2018, 13, e0208085. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Budsberg, S.C.; Jevens, D.J.; Brown, J.; Foutz, T.L.; DeCamp, C.E.; Reece, L. Evaluation of limb symmetry indices, using ground reaction forces in healthy dogs. Am. J. Vet. Res. 1993, 54, 1569–1574. [Google Scholar]
- Humphries, A.; Shaheen, A.F.; Gómez Álvarez, C.B. Biomechanical comparison of standing posture and during trot between German shepherd and Labrador retriever dogs. PLoS ONE 2020, 15, e0239832. [Google Scholar] [CrossRef]
- Bertram, J.E.; Lee, D.V.; Case, H.N.; Todhunter, R.J. Comparison of the trotting gaits of Labrador Retrievers and Greyhounds. Am. J. Vet. Res. 2000, 61, 832–838. [Google Scholar] [CrossRef] [PubMed]
- Brønniche Møller Nielsen, M.; Pedersen, T.; Mouritzen, A.; Vitger, A.D.; Nielsen, L.N.; Poulsen, H.H.; Miles, J.E. Kinetic gait analysis in healthy dogs and dogs with osteoarthritis: An evaluation of precision and overlap performance of a pressure-sensitive walkway and the use of symmetry indices. PLoS ONE 2020, 15, e0243819. [Google Scholar] [CrossRef] [PubMed]
- Schnabl-Feichter, E.; Tichy, A.; Bockstahler, B. Evaluation of a pressure plate for detection of hind limb lameness in cats. PLoS ONE 2020, 15, e0231904. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Amimoto, H.; Koreeda, T.; Ochi, Y.; Kimura, R.; Akiyoshi, H.; Nishida, H.; Miyabayashi, T.; Beale, B.S.; Hayashi, K.; Wada, N. Force Plate Gait Analysis and Clinical Results after Tibial Plateau Levelling Osteotomy for Cranial Cruciate Ligament Rupture in Small Breed Dogs. Vet. Comp. Orthop. Traumatol. 2020, 33, 183–188. [Google Scholar] [CrossRef]
- Della Valle, G.; Caterino, C.; Aragosa, F.; Micieli, F.; Costanza, D.; Di Palma, C.; Piscitelli, A.; Fatone, G. Outcome after Modified Maquet Procedure in dogs with unilateral cranial cruciate ligament rupture: Evaluation of recovery limb function by use of force plate gait analysis. PLoS ONE 2021, 16, e0256011. [Google Scholar] [CrossRef]
- Budsberg, S.C.; Kleine, S.A.; Norton, M.M.; Sandberg, G.S.; Papich, M.G. Comparison of the effects on lameness of orally administered acetaminophen-codeine and carprofen in dogs with experimentally induced synovitis. Am. J. Vet. Res. 2020, 81, 627–634. [Google Scholar] [CrossRef]
- Amimoto, H.; Koreeda, T.; Wada, N. Evaluation of recovery of limb function by use of force plate gait analysis after tibial plateau leveling osteotomy for management of dogs with unilateral cranial cruciate ligament rupture. Am. J. Vet. Res. 2019, 80, 461–468. [Google Scholar] [CrossRef] [PubMed]
- Tobias, K.M.; Johnston, S.A. Veterinary Surgery: Small Animal, 2nd ed.; Saunders: St Louis, MO, USA, 2017; ISBN 9780323320658. [Google Scholar]
- Schwarz, N.; Tichy, A.; Peham, C.; Bockstahler, B. Vertical force distribution in the paws of sound Labrador retrievers during walking. Vet. J. 2017, 221, 16–22. [Google Scholar] [CrossRef] [PubMed]
- Reicher, B.; Tichy, A.; Bockstahler, B. Center of Pressure in the Paws of Clinically Sound Dogs in Comparison with Orthopedically Diseased Dogs. Animals 2020, 10, 1366. [Google Scholar] [CrossRef] [PubMed]
- Pollock, A.S.; Durward, B.R.; Rowe, P.J.; Paul, J.P. What is balance? Clin. Rehabil. 2000, 14, 402–406. [Google Scholar] [CrossRef]
- Lewis, M.J.; Williams, K.D.; Langley, T.; Jarvis, L.M.; Sawicki, G.S.; Olby, N.J. Development of a Novel Gait Analysis Tool Measuring Center of Pressure for Evaluation of Canine Chronic Thoracolumbar Spinal Cord Injury. J. Neurotrauma 2019, 36, 3018–3025. [Google Scholar] [CrossRef]
- Blau, S.R.; Davis, L.M.; Gorney, A.M.; Dohse, C.S.; Williams, K.D.; Lim, J.-H.; Pfitzner, W.G.; Laber, E.; Sawicki, G.S.; Olby, N.J. Quantifying center of pressure variability in chondrodystrophoid dogs. Vet. J. 2017, 226, 26–31. [Google Scholar] [CrossRef] [Green Version]
- López, S.; Vilar, J.M.; Rubio, M.; Sopena, J.J.; Damiá, E.; Chicharro, D.; Santana, A.; Carrillo, J.M. Center of pressure limb path differences for the detection of lameness in dogs: A preliminary study. BMC Vet. Res. 2019, 15, 138. [Google Scholar] [CrossRef] [Green Version]
- Carrillo, J.M.; Manera, M.E.; Rubio, M.; Sopena, J.; Santana, A.; Vilar, J.M. Posturography and dynamic pedobarography in lame dogs with elbow dysplasia and cranial cruciate ligament rupture. BMC Vet. Res. 2018, 14, 108. [Google Scholar] [CrossRef] [Green Version]
- López, S.; Vilar, J.M.; Rubio, M.; Sopena, J.J.; Santana, A.; Rodríguez, O.; Rodríguez-Altonaga, J.A.; Carrillo, J.M. Pedobarography: A novel approach to test the efficacy of treatments for lameness; an experience with mavacoxib in dogs with elbow osteoarthritis. BMC Vet. Res. 2019, 15, 193. [Google Scholar] [CrossRef]
- Strasser, T.; Peham, C.; Bockstahler, B.A. A comparison of ground reaction forces during level and cross-slope walking in Labrador Retrievers. BMC Vet. Res. 2014, 10, 241. [Google Scholar] [CrossRef] [Green Version]
- Strasser, T. Ein Vergleich der Bodenreaktionskräfte von Labrador Retrievern im Schritt auf der Ebene und auf Schrägen. In Doctor Medicinae Veterinariae; Veterinary Univercity of Vienna: Vienna, Austria, 2015. [Google Scholar]
- Braun, L.; Tichy, A.; Peham, C.; Bockstahler, B. Comparison of vertical force redistribution in the pads of dogs with elbow osteoarthritis and healthy dogs. Vet. J. 2019, 250, 79–85. [Google Scholar] [CrossRef] [PubMed]
- Moreira, J.P.L.; Tichy, A.; Bockstahler, B. Comparison of the Vertical Force Distribution in the Paws of Dogs with Coxarthrosis and Sound Dogs Walking over a Pressure Plate. Animals 2020, 10, 986. [Google Scholar] [CrossRef] [PubMed]
- Aoki, S.; Sato, Y.; Yanagihara, D. Characteristics of leading forelimb movements for obstacle avoidance during locomotion in rats. Neurosci. Res. 2012, 74, 129–137. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.-L.; Lu, T.-W. Comparisons of the joint moments between leading and trailing limb in young adults when stepping over obstacles. Gait Posture 2006, 23, 69–77. [Google Scholar] [CrossRef] [PubMed]
- van Hedel, H.J.A.; Biedermann, M.; Erni, T.; Dietz, V. Obstacle avoidance during human walking: Transfer of motor skill from one leg to the other. J. Physiol. 2002, 543, 709–717. [Google Scholar] [CrossRef]
- Weerdesteyn, V.; Nienhuis, B.; Hampsink, B.; Duysens, J. Gait adjustments in response to an obstacle are faster than voluntary reactions. Hum. Mov. Sci. 2004, 23, 351–363. [Google Scholar] [CrossRef]
- Park, S.Y.; Lee, Y.S. Kinematics of the Lower Limbs during Obstacle Crossings Performed by Young Adultsand the Elderly. J. Phys. Ther. Sci. 2012, 24, 941–944. [Google Scholar] [CrossRef] [Green Version]
- Sato, Y.; Aoki, S.; Yanagihara, D. Gait modification during approach phase when stepping over an obstacle in rats. Neurosci. Res. 2012, 72, 263–269. [Google Scholar] [CrossRef]
- Heijnen, M.J.H.; Romine, N.L.; Stumpf, D.M.; Rietdyk, S. Memory-guided obstacle crossing: More failures were observed for the trail limb versus lead limb. Exp. Brain Res. 2014, 232, 2131–2142. [Google Scholar] [CrossRef]
- ResearchGate. Obstacle Crossing Characteristics in the Healthy Young Female and Elderly Female Subjects. Available online: https://www.researchgate.net/publication/277857596_Obstacle_Crossing_Characteristics_in_the_Healthy_Young_Female_and_Elderly_Female_Subjects (accessed on 21 February 2022).
- Wong, C.; Pearson, K.G.; Lomber, S.G. Contributions of Parietal Cortex to the Working Memory of an Obstacle Acquired Visually or Tactilely in the Locomoting Cat. Cereb. Cortex 2018, 28, 3143–3158. [Google Scholar] [CrossRef]
- Whishaw, I.Q.; Sacrey, L.-A.R.; Gorny, B. Hind limb stepping over obstacles in the horse guided by place-object memory. Behav. Brain Res. 2009, 198, 372–379. [Google Scholar] [CrossRef] [PubMed]
- McVea, D.A.; Pearson, K.G. Long-lasting memories of obstacles guide leg movements in the walking cat. J. Neurosci. 2006, 26, 1175–1178. [Google Scholar] [CrossRef]
- Sparrow, W.A.; Shinkfield, A.J.; Chow, S.; Begg, R.K. Characteristics of gait in stepping over obstacles. Hum. Mov. Sci. 1996, 15, 605–622. [Google Scholar] [CrossRef]
- Wang, Y.; Watanabe, K. The relationship between obstacle height and center of pressure velocity during obstacle crossing. Gait Posture 2008, 27, 172–175. [Google Scholar] [CrossRef] [PubMed]
- Besancon, M.F.; Conzemius, M.G.; Evans, R.B.; Ritter, M.J. Distribution of vertical forces in the pads of Greyhounds and Labrador Retrievers during walking. Am. J. Vet. Res. 2004, 65, 1497–1501. [Google Scholar] [CrossRef] [PubMed]
- Vitt, M.A.; Gordon-Evans, W.J.; Conzemius, M.G. Incidence of Normal versus Support Trot in the Healthy Adult German Shepherd Dog. Vet. Comp. Orthop. Traumatol. 2020, 33, 116–120. [Google Scholar] [CrossRef]
- Humphries, A.; Shaheen, A.F.; Gómez Álvarez, C.B. Different conformations of the German shepherd dog breed affect its posture and movement. Sci. Rep. 2020, 10, 16924. [Google Scholar] [CrossRef]
- Hans, E.C.; Zwarthoed, B.; Seliski, J.; Nemke, B.; Muir, P. Variance associated with subject velocity and trial repetition during force platform gait analysis in a heterogeneous population of clinically normal dogs. Vet. J. 2014, 202, 498–502. [Google Scholar] [CrossRef] [Green Version]



| Limb during Walking over One Obstacle | Position Relative to the Obstacle | Description of the Position Relative to the Obstacles | Abbreviation | Limb during Normal Walking for Comparison |
|---|---|---|---|---|
| Leading forelimb | −1 | The stance phase before the obstacle | LeFL−1 | Right forelimb |
| Leading forelimb | +1 | The stance phase after the obstacle | LeFL+1 | Right forelimb |
| Leading forelimb | +2 | The second stance phase after the obstacle | LeFL+2 | Right forelimb |
| Trailing forelimb | −1 | The stance phase before the obstacle | TrFL−1 | Left forelimb |
| Trailing forelimb | +1 | The stance phase after the obstacle | TrFL+1 | Left forelimb |
| Leading hindlimb | −1 | The stance phase before the obstacle | LeHL−1 | Right hindlimb |
| Leading hindlimb | +1 | The stance phase after the obstacle | LeHL+1 | Right hindlimb |
| Leading hindlimb | +2 | The second stance phase after the obstacle | LeHL+2 | Right hindlimb |
| Trailing hindlimb | −2 | Two stance phases before the obstacle | TrHL−2 | Left hindlimb |
| Trailing hindlimb | −1 | The stance phase before the obstacle | TrHL−1 | Left hindlimb |
| Trailing hindlimb | +1 | The stance phase after the obstacle | TrHL+1 | Left hindlimb |
| Limb during Walking over Two Obstacles | Position Relative to the Obstacles | Description of the Position Relative to the Obstacles | Abbreviation | Limb during Normal Walking for Comparison |
|---|---|---|---|---|
| Inter-obstacle forelimb | −1 | The stance phase before the first obstacle | IOFL−1 | Right forelimb |
| Inter-obstacle forelimb | 0 | The stance phase in-between the two obstacles | IOFL0 | Right forelimb |
| Inter-obstacle forelimb | +1 | The stance phase after the second obstacle | IOFL+1 | Right forelimb |
| Non-inter-obstacle forelimb | −1 | The stance phase before the first obstacle | NIOFL−1 | Left forelimb |
| Non-inter-obstacle forelimb | +1 | The stance phase after the second obstacle | NIOFL+1 | Left forelimb |
| Inter-obstacle hindlimb | −1 | The stance phase before the first obstacle | IOHL−1 | Right hindlimb |
| Inter-obstacle hindlimb | 0 | The stance phase in-between the two obstacles | IOHL0 | Right hindlimb |
| Inter-obstacle hindlimb | +1 | The stance phase after the second obstacle | IOHL+1 | Right hindlimb |
| Non-inter-obstacle hindlimb | −2 | Two stance phases before the first obstacle | NIOHL−2 | Left hindlimb |
| Non-inter-obstacle hindlimb | −1 | The stance phase before the first obstacle | NIOHL−1 | Left hindlimb |
| Non-inter-obstacle hindlimb | +1 | The stance phase after the second obstacle | NIOHL+1 | Left hindlimb |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Charalambous, D.; Strasser, T.; Tichy, A.; Bockstahler, B. Ground Reaction Forces and Center of Pressure within the Paws When Stepping over Obstacles in Dogs. Animals 2022, 12, 1702. https://doi.org/10.3390/ani12131702
Charalambous D, Strasser T, Tichy A, Bockstahler B. Ground Reaction Forces and Center of Pressure within the Paws When Stepping over Obstacles in Dogs. Animals. 2022; 12(13):1702. https://doi.org/10.3390/ani12131702
Chicago/Turabian StyleCharalambous, Danae, Therese Strasser, Alexander Tichy, and Barbara Bockstahler. 2022. "Ground Reaction Forces and Center of Pressure within the Paws When Stepping over Obstacles in Dogs" Animals 12, no. 13: 1702. https://doi.org/10.3390/ani12131702