1. Introduction
Structural health monitoring (SHM) is a crucial tool for comprehensively assessing the performance of a structure. It serves multiple functions, including diagnosing the location and extent of structural damage and intelligently evaluating structural health in terms of usage status, reliability, durability, and carrying capacity. In the presence of adverse conditions, such as structural damage or abnormal behavior, the SHM system triggers early warning signals, providing essential guidance and a foundation for informed building maintenance and management decisions.
Recent years have witnessed substantial growth in the realm of SHM, actively contributing to the improved reliability of structures through the advancement of methodologies for damage detection. A key aspect of this progress involves the use of non-destructive methods, which play a pivotal role in the early identification of structural impairments without causing any destructive impact on the structures themselves. Despite offering valuable insights into structural conditions, these non-destructive methods often require information about the healthy states of a structure as a reference for comparative analysis with the current state obtained through nondestructive evaluation.
In the domain of SHM, a diverse array of methodologies is employed to safeguard the integrity and functionality of various structures. These approaches encompass techniques leveraging acoustic emissions [
1], vibration analysis [
2], laser scanning [
3], and the propagation of ultrasonic waves [
4]. Acoustic emissions, for instance, primarily arise from the sudden release of energy within stressed materials, giving rise to transient elastic waves. This phenomenon intricately corresponds to numerous fracture or deformation processes within the material, including crack initiation and propagation, microstructural separation, and material phase displacement [
5]. Conversely, vibration analysis serves as a crucial method, where the amplitude of transmitted signals plays a pivotal role in extracting valuable insights into the structural condition. Furthermore, the emerging integration of machine learning and artificial intelligence techniques in the field of SHM holds the potential for improving damage localization accuracy by leveraging vast amounts of data and learning complex patterns. This can be observed in the research conducted by [
4] where a machine learning (ML)-based damage detection method is presented. This method utilizes aggregated baselines independent of their damaged states to enhance the generalization capability of ML algorithms by considering similar structural characteristics. Through the application of these diverse methodologies, SHM strives to offer comprehensive monitoring and assessment, thereby enhancing safety and performance across a spectrum of engineering applications. Other innovative methodologies combine non-contact sensors, such as interferometric radar sensors, with finite element modeling. Such methods have shown promising results in accurately capturing the dynamic behavior of structures under various loading conditions. One notable study using this technique investigated the dynamic performance of bridge bearings by capturing the real-time dynamic behavior of the bridge under traffic loading, including key dynamic characteristics such as natural frequencies, which are sensitive indicators of structural integrity [
6,
7]. In addition to bridge bearings, another study focused on damage identification metrics for smart beams equipped with piezoelectric elements for SHM [
8]. This investigation presents a comprehensive analysis of damage identification metrics and their performance. The study highlights the significance of piezoelectric patches in SHM and explores the use of computational models and experimental testing to assess structural damage and stiffness changes in beams. Such implementations enhance the effectiveness of bridge monitoring systems and improve maintenance practices to ensure the continued safety and performance of bridge infrastructure.
SHM serves as a cornerstone in ensuring the safety, longevity, and optimal performance of civil infrastructure, mechanical systems, and aerospace structures. A fundamental aspect of SHM is the accurate localization of damage within these structures, which is crucial for timely maintenance and proactive management strategies. However, achieving precise damage localization is a complex task influenced by a multitude of factors. One critical consideration is the strategic placement of sensors or monitoring devices, as demonstrated in [
9], where Finite Element Modeling (FEM) is employed to create a mesh model of the structure, distinguishing between stressed and unstressed zones. Leveraging FEM outcomes, the study identifies optimal sensor positions to maximize coverage within a limited sensor count.
Environmental conditions, such as temperature fluctuations, introduce additional challenges by influencing structural behavior and signal characteristics. Several studies in the field of structural health monitoring have investigated the influence of temperature variations on damage detection methodologies. For instance, a novel approach was proposed in [
10] to examine damage localization and quantification in structures subjected to changing temperature conditions. The findings highlight the challenge posed by temperature fluctuations, which can alter the vibration properties of structures and complicate the creation of accurate baselines for damage detection. By employing a single temperature condition as a baseline and utilizing a two-stage approach involving Finite Element Modeling (FEM), the influence of temperature changes was successfully eliminated, and precise damage locations and extents were identified.
The inherent complexity of structures, characterized by geometric intricacies, material heterogeneity, and structural connections, presents significant challenges for accurate damage localization. Various types and severities of damage manifest distinct signatures, further complicating the localization process. Depending on the severity of the damage, different methodologies must be employed. For instance, in the case of detecting extensive damage in structures, image segmentation techniques, coupled with suitable neural networks [
11], can effectively identify scenarios like wall collapses. Conversely, when dealing with sensitive structures, where even minor damages are of concern, more sensitive detection methods are required. In such cases, ultrasonic wave propagation techniques, as demonstrated by [
12], offer a more suitable approach, leveraging vibration response-based techniques.
Noise in measurement signals, stemming from sensor inaccuracies or environmental interference, significantly hampers the clarity of damage signatures, thus compromising the accuracy of localization efforts. This noise, whether originating from sensor malfunctions or external factors such as vibrations or electromagnetic interference, poses a substantial challenge in distinguishing genuine damage-induced changes from background fluctuations. Addressing this issue requires robust signal processing techniques and meticulous sensor calibration to filter out noise while retaining relevant structural information. Additionally, strategic sensor placement and shielding measures can minimize the impact of environmental interference, ensuring more reliable and accurate damage localization outcomes. An experimental analysis by [
13] highlighted the effects of external vibration and noise on SHM applications based on the EMI method, emphasizing the critical nature of these challenges in structural diagnosis. Their findings underscored the significant impact of noise and vibration on impedance signatures and damage indices, necessitating the development of advanced signal processing techniques and more effective indices for damage detection under real-world conditions.
Commencing with advancements in data fusion techniques, which seamlessly integrate data from multiple sensors or measurement methods, the field of SHM has witnessed a remarkable stride toward enhancing localization precision. For instance, as an example application of this field, one technique was utilized to establish a relatively coarse actuator/sensor (AS) network. As the process advances, targeted refinement of the AS network in regions suspected of damage further augments localization precision [
14]. This fusion of data methodologies not only propels the accuracy of damage detection but also heralds a new era in optimizing SHM practices.
In light of these multifaceted challenges, this paper aims to explore and address the various factors influencing damage localization within SHM frameworks. Specifically, it investigates the effect of PZT sorting and iterating techniques on 2D damage localization within concrete structures. Moreover, this study endeavors to enhance the previously developed method [
15,
16] by introducing the alpha interpolation technique, which is a novel contribution. While the previous work utilized a different approach, iterating along the transducers to consider all possible connections between them as AS paths, the introduction of the alpha interpolation method aims to improve damage localization accuracy within SHM contexts. Our proposed method achieves maximum area coverage with minimal overlap, thus enhancing the accuracy of damage detection.
In this paper, the hybrid damage detection method proposed in our previous research [
15,
16] is further refined through the incorporation of the alpha interpolation method. This refinement aims to enhance the accuracy of damage detection and localization. The characteristics and prerequisites for applying the alpha interpolation method are detailed through several consecutive examples, all of which are implemented on numerical models of a 2D concrete plate. The first parameter of interest is the interpolation mechanism used within the hybrid method. The subsequent investigation focuses on the newly introduced alpha interpolation method, including the determination of the considered area for each interpolation round. Additionally, the impact of averaging accumulated Damage Index (DI) values is explored. Finally, the concept of time-gating is integrated into the improved method, with consideration given to four signal truncation scenarios.
The structure of this paper is organized as follows. In
Section 1, we examine various applications in the field of SHM and explore the factors influencing damage localization accuracy.
Section 2 delineates the process of determining theoretical Time-of-Arrival (ToA), introduces the concept of time-gating, and conducts a conceptual comparison between the recent interpolation method and the developed alpha interpolation method for damage localization in 2D. Moving on,
Section 3 details the model inputs and characteristics, while also presenting supporting examples of the developed method. These examples encompass the effect of different damage location and size criteria, interpolation areas, and the influence of various signal truncation policies on damage localization accuracy. Subsequently,
Section 4 elucidates the findings resulting from the improvements in the damage detection strategy. Finally, in
Section 5, we highlight the major contributions of this paper and provide suggestions for future research in the field of SHM.
2. Methodology
The method considered in this paper is a modified version of the damage localization method developed by our group [
16]. The common idea is that signal propagation is sent within a specimen iteratively at different points on the surface of it. Then each signal is recorded on other predefined points, which are also located on the surface. The recorded signals will be post-processed to get rid of possible noise. After that, the energy loss between a reference state of the specimen and the measured state (damaged state) is used to obtain the one-dimensional
for each Actuator/Sensor path (AS path). Finally, all the calculated
values are utilized to detect the existence and location of the damage by applying a specific interpolation technique.
2.1. 1D Damage Index Implementation
The implementation of the one-dimensional
is achieved using the energy difference between the undamaged and damaged states of the specimen. The
is defined as the root mean square deviation (RMSD) method [
15]. Furthermore, every input signal undergoes decomposition into sets using n-level wavelet decomposition, employing the Daubechies wavelet db9 as the mother wavelet. The rationale behind choosing this specific mother wavelet stems from its proficiency in precisely localizing signal characteristics and demonstrating consistent properties [
17]. These characteristics render it highly suitable for analyzing signals that encompass discontinuities and spikes.
The energy of individual waveforms transmitted from a single sender to a single receiver is computed based on decomposed signals. These decomposed signals, denoted by the vector
, encompass signals at 2
n levels, with each
containing
sample data points.
The energy of each decomposed signal, denoted as
, where
represents the decomposed signal index (with
), provides insights into the energy distribution across different states of the specimen (e.g., intact or damaged).
For each state (intact or damaged), the energy distribution is captured in vectors
and
, where each element represents the energy of a specific decomposition.
Utilizing the Root Mean Square Deviation (RMSD) rule, the Damage Index (
) is calculated as:
Here, represents the index of each decomposition level.
The ranges between 0 (indicating an undamaged specimen) and 1 (indicating a fully damaged specimen).
2.2. The Concept of the Time-of-Arrival & Time-Gating Technique
As part of the signal processing steps considered in our damage detection method, both the ToA and the time-gating concept are mainly used to obtain useful information on the signals.
2.2.1. The Theoretical Time of Arrival
In our developed approach, the time of arrival criterion holds significant importance as it serves as a primary determinant for assessing the obtained signals. The theoretical time of arrival is derived from the physical attributes of the specimen and the excitation signal, as outlined by the following equation.
where:
: the distance between the actuator (A) and the sensor (S) on the specimen [m].
: the fastest velocity of the propagated wave ( longitudinal velocity) [m/s].
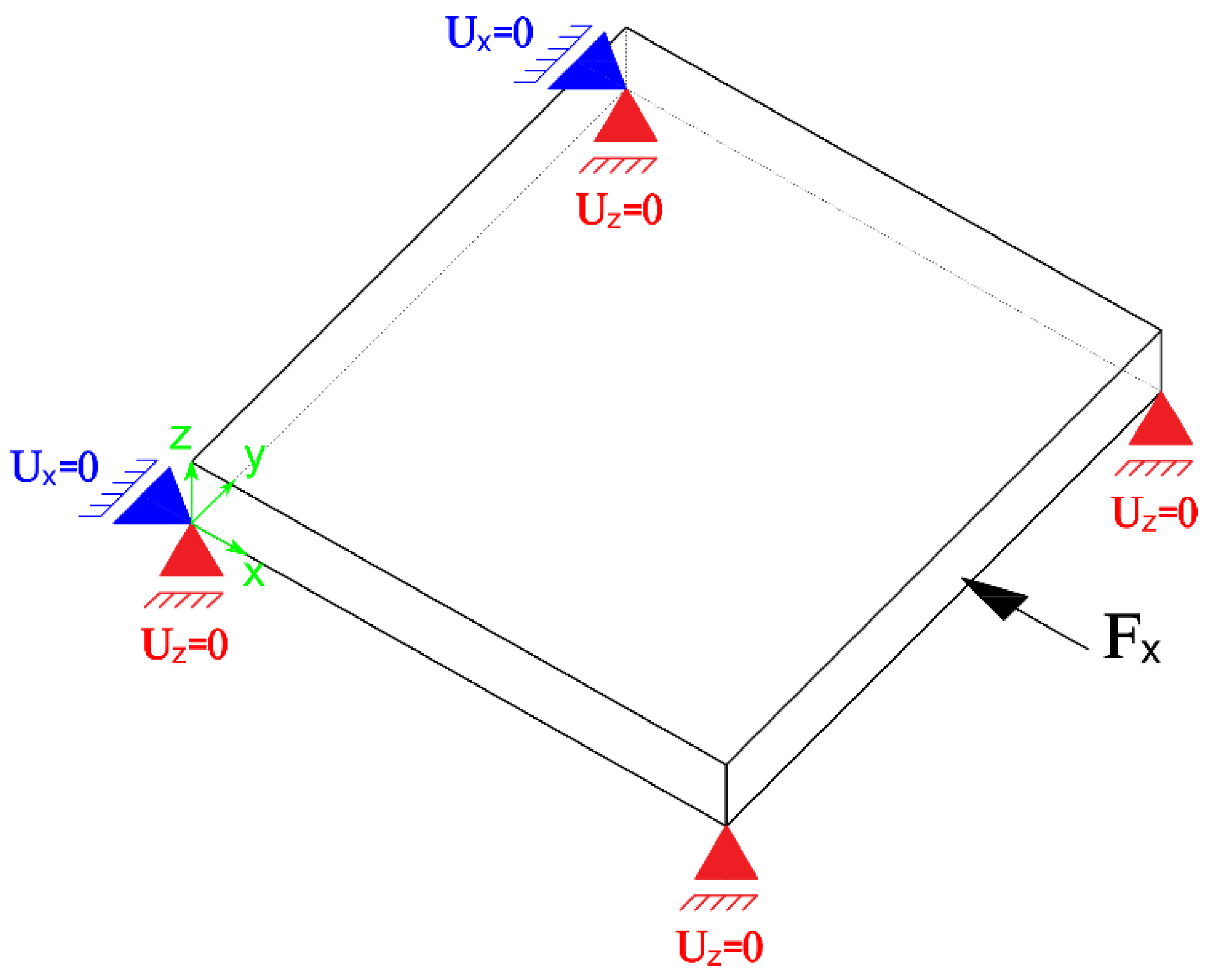
The concrete material defined for this paper is considered an isotropic elastic material. Additionally, the lateral dimensions of the specimens are big enough compared to the wavelength to be considered. Based on these considerations, the longitudinal velocity of the propagated wave is calculated based on the material properties as follows
where the Lame constants (
) required for the calculation can be acquired depending on the material properties as follows:
where
—Young’s modulus, Poisson’s ratio, and material density, respectively.
2.2.2. The Time-Gating Strategy
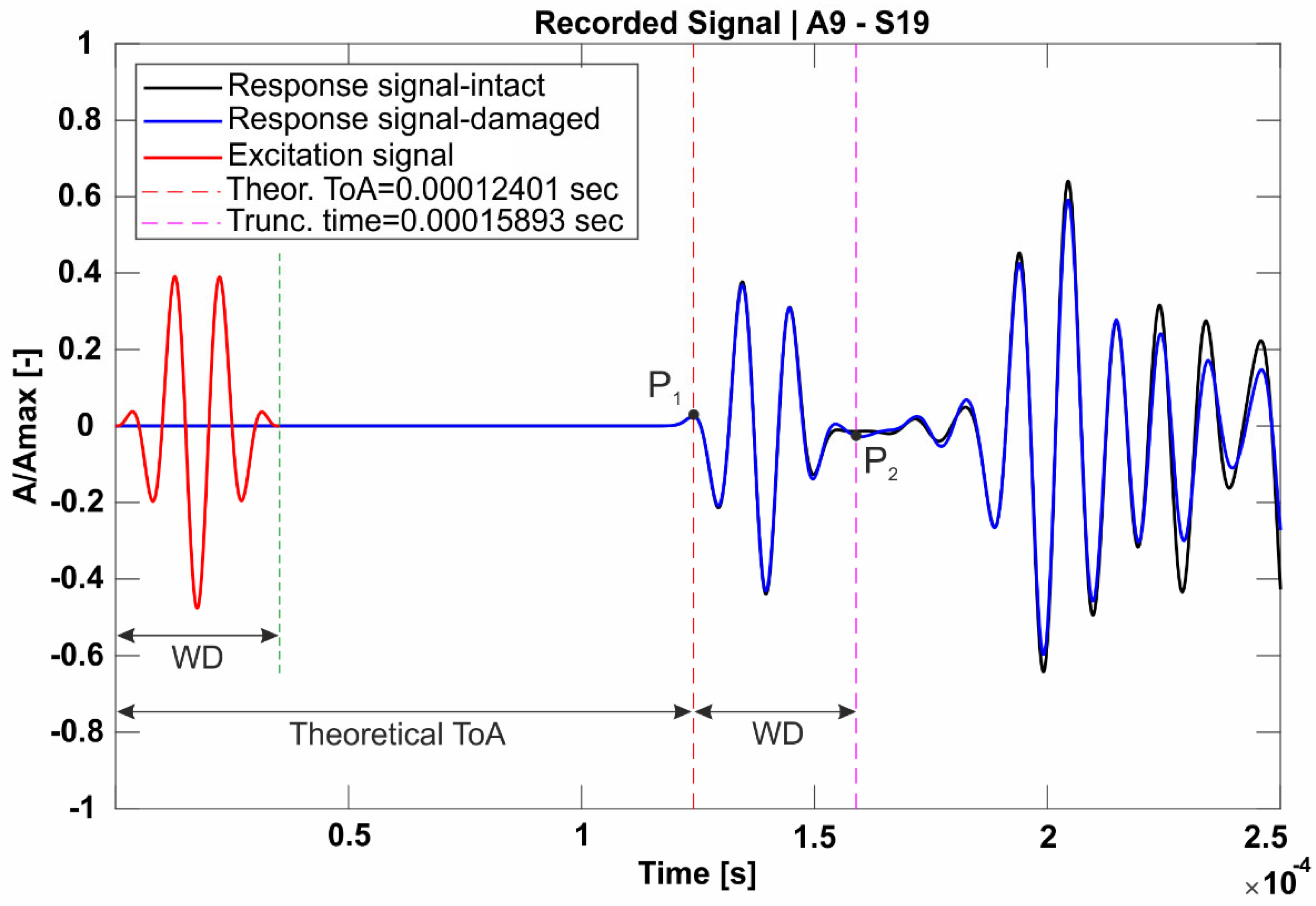
We incorporate the time-gating approach in one of our trials within this paper. In this method, the signal captured by a sensor is trimmed, commencing at a specific time point (P1) and concluding at another time point (P2) subsequent to the initiation.
Multiple time gates are explored in this study to determine the most optimal time duration for improved damage localization. The concept of time-gating is depicted in
Figure 1 where the red line represents the excitation signal, with its duration indicated as WD. Following the acquisition of the theoretical ToA, point P1 is determined on the response signal, while point P2 is defined by adding WD to the theoretical ToA which is expressed by the duration from zero to the green dot line in
Figure 1.
All attempts applied to the alpha interpolation method with the old numbering and iteration technique are performed considering the time gate between P1 and P2 as shown in
Figure 1. Time gating is applied to signals of each AS path for both intact and damaged cases of the specimen.
2.3. Recent Triangle Interpolation Method
In the previous publication of our group [
4,
14,
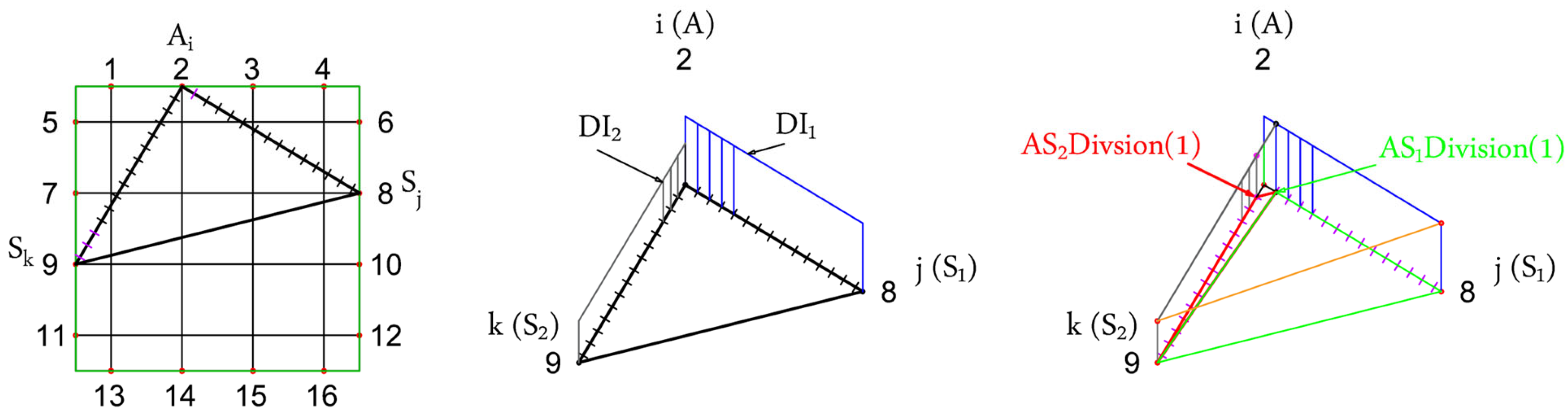
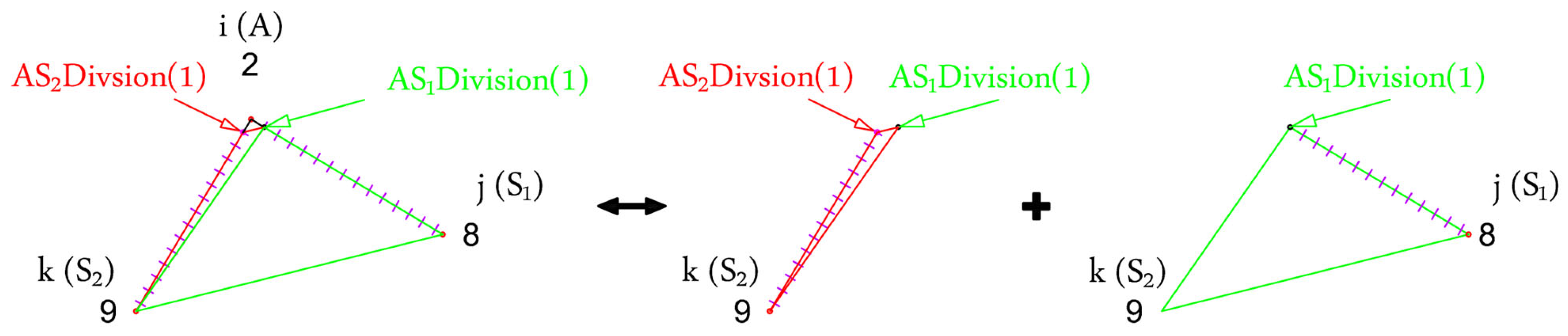
18], we investigated damage detection using the triangular-based interpolation algorithm where two paths are considered at each time between one actuator and two other sensors attached to the surfaces of the specimen. However, this included an additional generation of two sub-triangles of the generated triangle to avoid assigning two values of the
value corresponding to the actuator point. This is shown in
Figure 2 and
Figure 3, where each of the original paths
-
and
-
are first divided into a certain number of divisions based on the predefined interpolation element size. Then the first point generated on each path is considered to create a new sub-triangle. Thus, we get two triangles from each triangle as shown in
Figure 2 and
Figure 3. The first triangle in red, while the second one is shown in green color.
2.4. Alpha Ratio Interpolation Methodology
The presented technique is implemented to get rid of the additional steps and data generation required within the method discussed in the previous section.
For the implementation of the alpha interpolation method, two AS paths are required including their
values. As illustrated in
Figure 4, a reference point (
) is taken to acquire the reference angle (
) that defines the angle of the path
-
. Similarly, the path
-
is defined using the angle (
), defining its angle w.r.t. as the first path.
Thus, for a random point (
) within the angle
-
-
, the
can be calculated based on the linear relationship between each angle and its corresponding
value as follows
where
is the angle between the A-
path and the path between the actuator A and the random point
.
In our developed method, interpolation occurs for predefined seeds evenly distributed across the specimen. Seed generation is based on a preset interpolation mesh size within the specimen. This yields a fixed number of geometric data points instead of creating nodes within each interpolation triangle, as performed in the previous method [
16]. Consequently, we explore two possible domain considerations for the interpolation process, elaborated in the following sections.
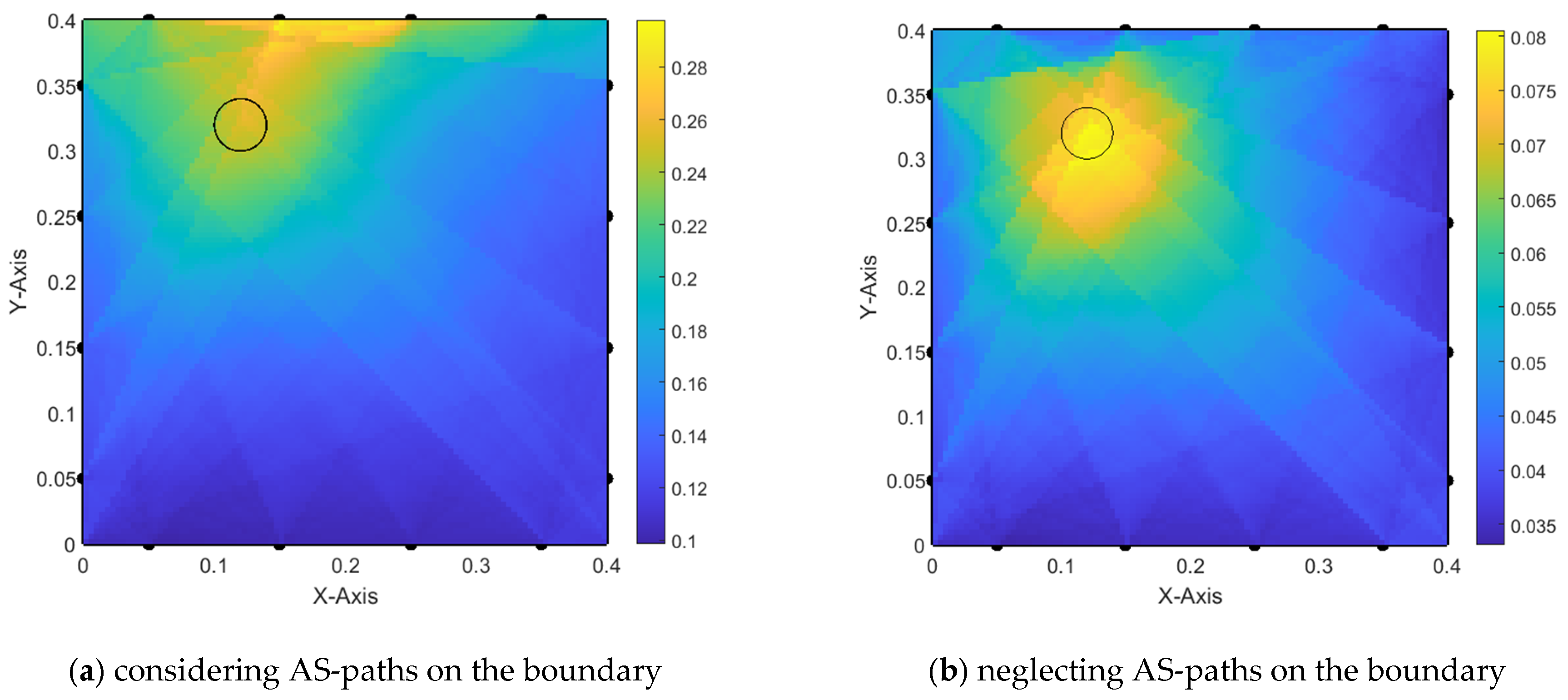
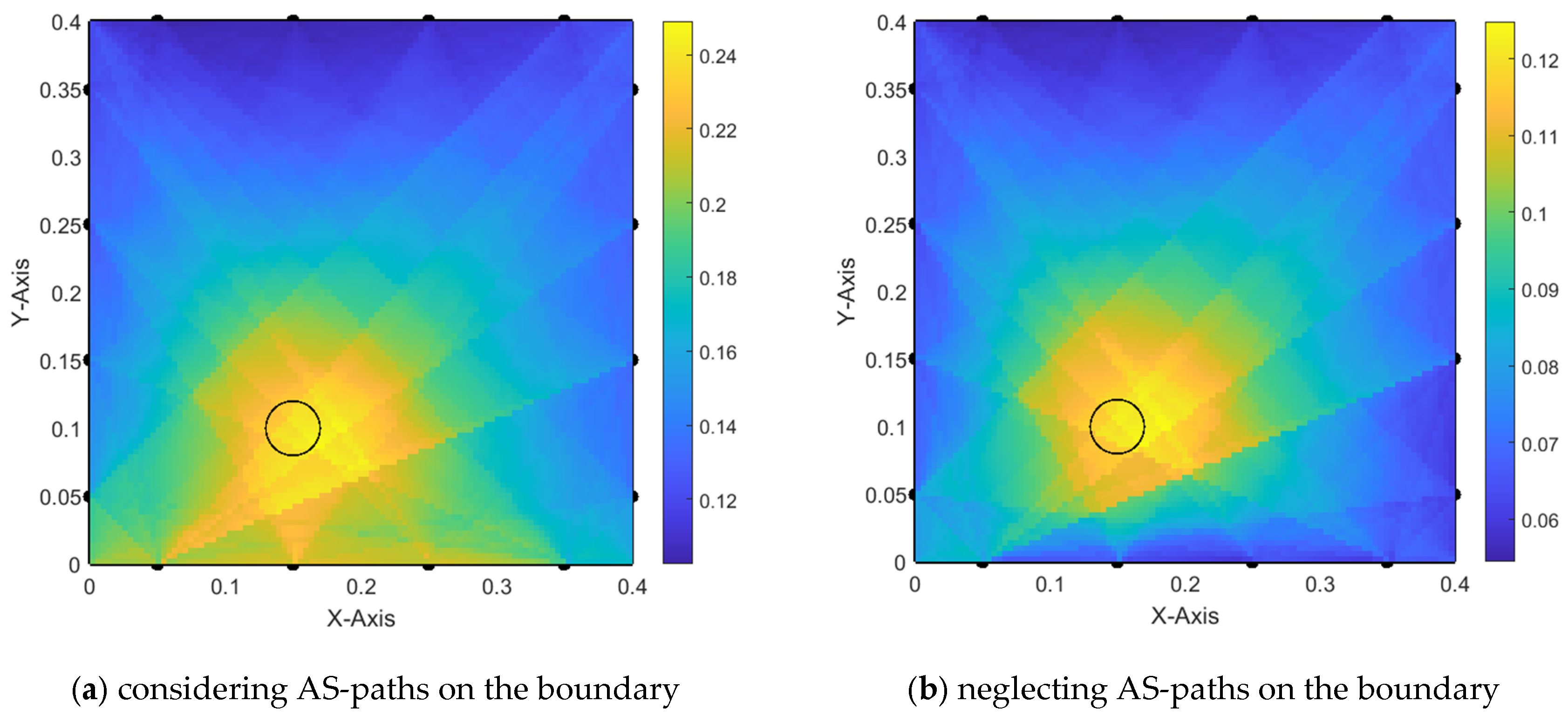
2.4.1. Triangles Interpolation for Damage Detection
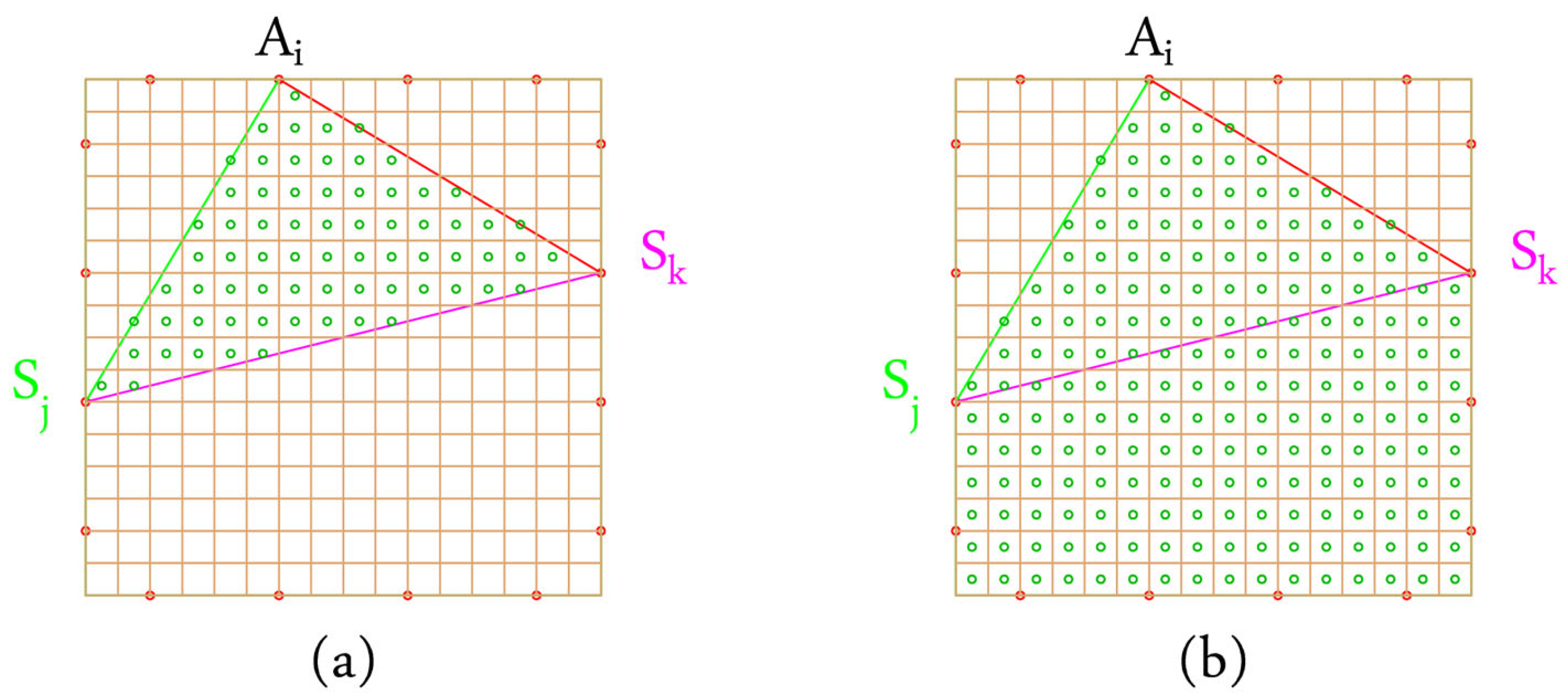
In this interpolation domain picking strategy, the predefined seeds are solely considered if they fall within the boundary outlined by each pair of AS paths (
-
,
-
), forming a triangle A-
-
. This is illustrated in
Figure 5a where only points within the generated triangle are considered.
2.4.2. Triples Interpolation for Damage Detection
In this interpolation domain picking strategy, the predefined seeds are exclusively considered if they fall within the region defined by the angle formed between the trio S
1-A-S
2. This approach assumes a uniform value of the
for all points sharing the same angle with the reference path.
Figure 5b illustrates the region encompassed by this trio and showcases sample seeded points within this area.
2.5. The Impact of Averaging Interpolation Results on Damage Localization
In the context of the previous damage detection method, we observed certain approximation processes occurring. The resulting values from various triangles, sharing the same geometrical location, were either accumulated or averaged. Consequently, further investigation was undertaken to compare both approaches.
However, in our modified method (alpha interpolation), employing the new numbering and iteration system, this loss of information is mitigated.
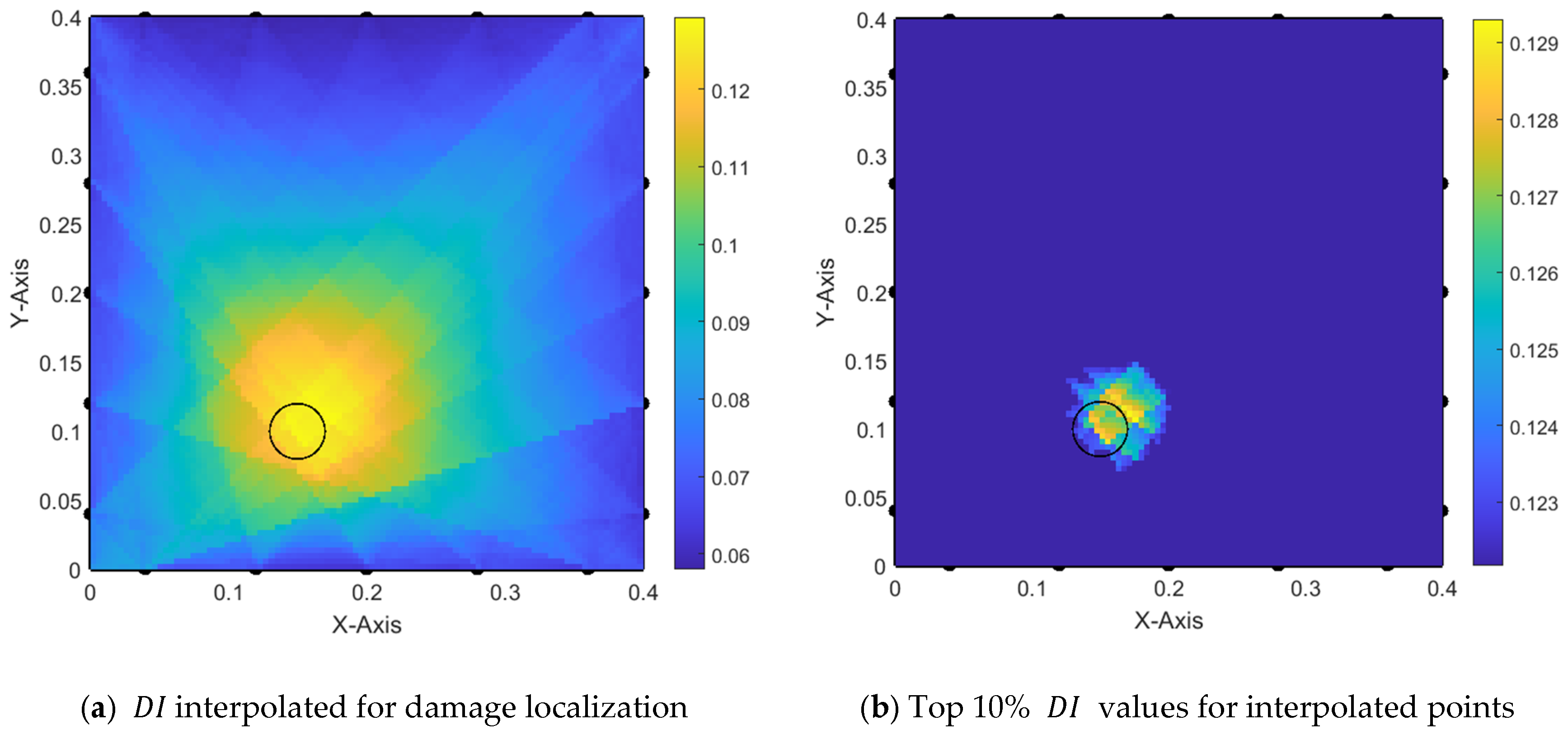
2.5.1. Accumulating DI of Interpolation Points
During the process of interpolating the
values within each seed node, many values at the same seed node might be acquired. Thus, these values are summed up for the corresponding node.
Figure 6 illustrates this phenomenon, where at node (201), three values from three different triangles are summed up.
2.5.2. Averaging DI of Interpolation Points
In this policy, the
values of each seed node are averaged in the case of having multiple values at one node. This is also shown in
Figure 6 where node (216) has four different values of
resulting from four different triangles. Thus, the final value of
at this node is the average of all these four values.
2.6. Recent vs. Modified Alpha Interpolation Methods
In addition to the previously mentioned alpha interpolation methodology (
Section 2.4), a modified numbering protocol and iteration system is introduced in this research to get rid of the additional data generation and information loss. In
Table 1, a comparison between the previous strategy and the modified alpha interpolation method is summarized. Furthermore, an illustrative sketch of the main differences between both methods is presented in
Figure 7.
The new numbering protocol is designed to iterate without overlap between the triangles generated from the AS paths. The iteration policy is adjusted accordingly to achieve this objective. In this method, the seed nodes acquire a single value for each round of excitation. Consequently, the need to average or accumulate values arises only between different excitation rounds.
As an explanation of the modified alpha interpolation method, on the right-hand side of
Figure 7, the first iteration triangle is constructed from A2-S4-S5. In the next iteration, the triangle built of points A2-S5-S6 is considered for the
interpolation of each point inside its surface. In this manner, the iterations are carried out until all areas are covered by the PZTs except the blind areas on the corners. These areas can be also interpolated in the case of considering areas constructed by triples instead of triangles between AS paths. Both scenarios are thoroughly investigated in this paper.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}