1. Introduction
Hydrostatic transmission systems are commonly used in the industry such as in vehicles and machineries that utilize hydraulic fluid to transmit power. They are able to provide high power, low inertia, reliability, and flexibility in terms of changing the transmission ratio, and are easy to automate. Hydraulic systems are typically classified into either open-loop or closed-loop circuits. Studies on valve-controlled open-loop systems have shown problems of pressure drops and leakages at control valves, resulting in energy wastage [
1,
2,
3]. On the other hand, closed-loop circuits offer increased transmission efficiency by eliminating the need for directional control valves. Past investigations have utilized direct control of the hydraulic actuator by the operation of the pump [
4,
5]. Thus, a closed-loop circuit is more efficient in transmitting power to generate high force or torque in the actuator than an open-loop circuit. Using electro-hydraulic actuators (EHAs), power can be transferred from the high speed of an electric motor to the high force of a hydraulic cylinder [
6]. A closed-loop hydraulic circuit has demonstrated high working efficiency of 60% to 68.2% in an energy regeneration system of the boom for a hydraulic excavator [
7]. The development of the EHA has progressed from applications in research projects [
8,
9] up to the commercialization stage [
10].
The precise dynamic modeling of the EHA is particularly challenging as it is a highly nonlinear and uncertain system. Furthermore, it is arduous to estimate the system parameters accurately, particularly in practical situations, heightening the challenge of implementing model-based control algorithms for governing the position of the actuator. While a sliding mode control algorithm is a useful approach for nonlinear systems [
11], the conventional sliding mode control method requires a precise dynamic model of the system [
12]. Thus, researchers have proposed several control strategies to solve these difficulties. Cheng and Shanan designed an adaptive time-varying sliding control for a hydraulic servo system [
13]. A self-tuning control strategy to manage a low-friction pneumatic actuator under the influence of gravity was presented by Richardson, Plummer, and Brown [
14]. Guan and Pan proposed and successfully tested an adaptive sliding mode controller for the electro-hydraulic system [
15], while Acarman, Hatipoglu, and Ozguner suggested a feedback-linearization control strategy with consideration for various states of the chamber pressure in the system model [
16]. Additionally, a fuzzy control technique can act as a useful tool for nonlinear structures without model-based requirements [
17,
18]. However, traditional fuzzy controllers depend on the expert or operator’s experience, making it difficult to design an effective fuzzy logic controller.
To overcome the limitations of conventional PID algorithms when managing systems with dynamic uncertainty, several researchers have proposed hybrid controllers that combine the fuzzy logic control algorithm with PID, sliding mode, or neural network controls [
19,
20]. For example, Zhao, Chen, Dian, Guo, and Li [
21] proposed applying type-2 fuzzy logic to estimate PID controller parameters online for controlling power-line inspection (PLI) robot systems. In another study, Phu, Hung, Ahmadian, and Senu [
22] designed an intelligent controller based on the combination of the fuzzy-PID controller and a fuzzy control differential equation. Ursu, Tecuceanu, Toader, Calinoiu, Ursu, and Berar [
23] proposed a novel solution for the positioning of the outer loop of a hydrostatic type servo actuator using an application of the neuro-fuzzy control rule. During their research, they investigated the fundamental issues related to the control of hydrostatic EHA systems. The team conducted experiments by supplying hydraulic oil from a fixed displacement, bidirectional Haldex hydraulic gear pump to the cylinder doublet, which consists of two single-acting parts. The results of their study underscore the remarkable effectiveness of the neuro-fuzzy control algorithm, which ensured optimal dynamic behavior of the hydrostatic servo actuator, paving the way for innovative solutions in the field.
To significantly improve the energy efficiency of hydraulic systems, innovative hydraulic architectures must be developed that allow components to operate in high efficiency regions. Vukovic and Murrenhoff [
24] developed a comprehensive classification barcode with a comprehensive range of standard analog and state-of-the-art digital hydraulic components. This barcode has been implemented in two major research projects, one on mobile hydraulic systems for excavators and the other on switched displacement hydrostatic transmissions for wind turbines, successfully achieving significant improvements in energy efficiency. Yordanov, Ormandzhiev, and Mihalev [
25] also made commendable progress in the field of hydraulic system control by implementing benchmarking results of control quality using standard fuzzy controllers and classical PI controllers in an experimental electrohydraulic servo system. These controllers were compared based on various quality indicators with two input thermals (error and error derivative) and three input thermals (error, first error derivative, and output derivative). Such important advances in hydraulic system architecture and control will revolutionize the field with newfound efficiency and precision. Chen, Liu, Jia, Qiu, and Yu, et al. [
26] introduced a breakthrough nonlinear adaptive backstepping control technique to address the highly relevant system parameter uncertainty problem that arises in the position control process of an electrohydraulic servo closed-loop pump control system. Their approach deals with the parameter uncertainty of the nonlinear system by setting the adaptive rate of the uncertain parameter. This modifies the parameter disturbance online in real time, thus improving the accuracy and robustness of the control system. Experimental tests on a pump control system platform have verified the feasibility of the controller, with impressive results confirming the effectiveness of the proposed control strategy. The pump control system can now be effortlessly controlled with high precision, demonstrating a steady-state control accuracy of ±0.02 mm, providing an encouraging basis for the technical application and promotion of the pump control system. Similarly, Rybarczyk and Milecki [
27] proposed some modifications to improve both the dynamics of an electrohydraulic servo drive and the adaptation to load forces, thus reducing energy consumption. They described the application of the model following control (MFC) method to the control of an electrohydraulic servo drive with a unique proportional valve designed with a permanent magnet synchronous motor (PMSM). To validate the effectiveness of their method, they proposed a theoretical description of the drive, modeled and tested using simulations. Laboratory investigations were also conducted to compare the simulation results with real-world tests. It was shown that the use of MFC significantly reduces the settling time of the drive and improves its overall dynamics. Overall, these significant advances are game changers in the field of electrohydraulic systems, and their implications will undoubtedly continue to drive progress and achievements in the field.
Ren, Mou, Wen, and Chen [
28] made remarkable progress by synthesizing a position controller using quantitative feedback theory (QFT) for a single-rod EHA while considering the tolerance to internal actuator leakage, different loads, and environmental stiffness. Comparing their fault-tolerant controller with another QFT controller synthesized without considering the leakage fault, the simulation results showed that the fault-tolerant QFT controller could achieve the prescribed specifications even with internal leakage up to 8.6 L/min, thus confirming its effectiveness and reliability. Similarly, Sun, Dong, Wang, and Li [
29] proposed dynamic models for the valve-controlled asymmetric hydraulic cylinder, and a simplified mathematical model of the electrohydraulic position servo system was determined by ignoring the nonlinear factors of the servo valve. They designed a novel sliding mode control (SMC) method based on the adaptive reaching law to control the displacement and velocity of the piston. Through comparative analysis of the SMC controller with the traditional exponential reaching law and the adaptive reaching law, their Amesim/Simulink co-simulation results confirmed that this method significantly suppressed the sliding mode chatter of the electrohydraulic position servo system. These cutting-edge advances lead to significant improvements in the integrity, efficiency, and reliability of hydraulic systems.
This study proposes the development of an adaptive fuzzy sliding mode controller for regulating the position tracking of the electro-hydraulic actuator (EHA), leveraging on virtual prototyping technology to visualize the system performance. The proposed controller employs a finite combination of basic functions to represent two unknown time-varying functions into which the system uncertainties have been lumped together. Furthermore, a fuzzy logic inference mechanism removes the chattering issue from conventional sliding mode control by employing a hitting control law. Currently, thanks to the robust development of engineering software, virtual prototyping technology can simulate and evaluate real system performance without experiments, lowering manufacturing costs and errors while ensuring product quality [
30,
31,
32,
33,
34,
35,
36]. The tracking control performance of the EHA is evaluated through a virtual model created using Amesim software.
This paper is structured as follows: In
Section 2, we present the modeling of the EHA. Then, based on the dynamic model,
Section 3 outlines the design of an adaptive fuzzy sliding mode controller.
Section 4 presents the virtual model and simulation results, and finally,
Section 5 concludes with the findings of the study.
2. Modeling of Electro-Hydraulic Actuator
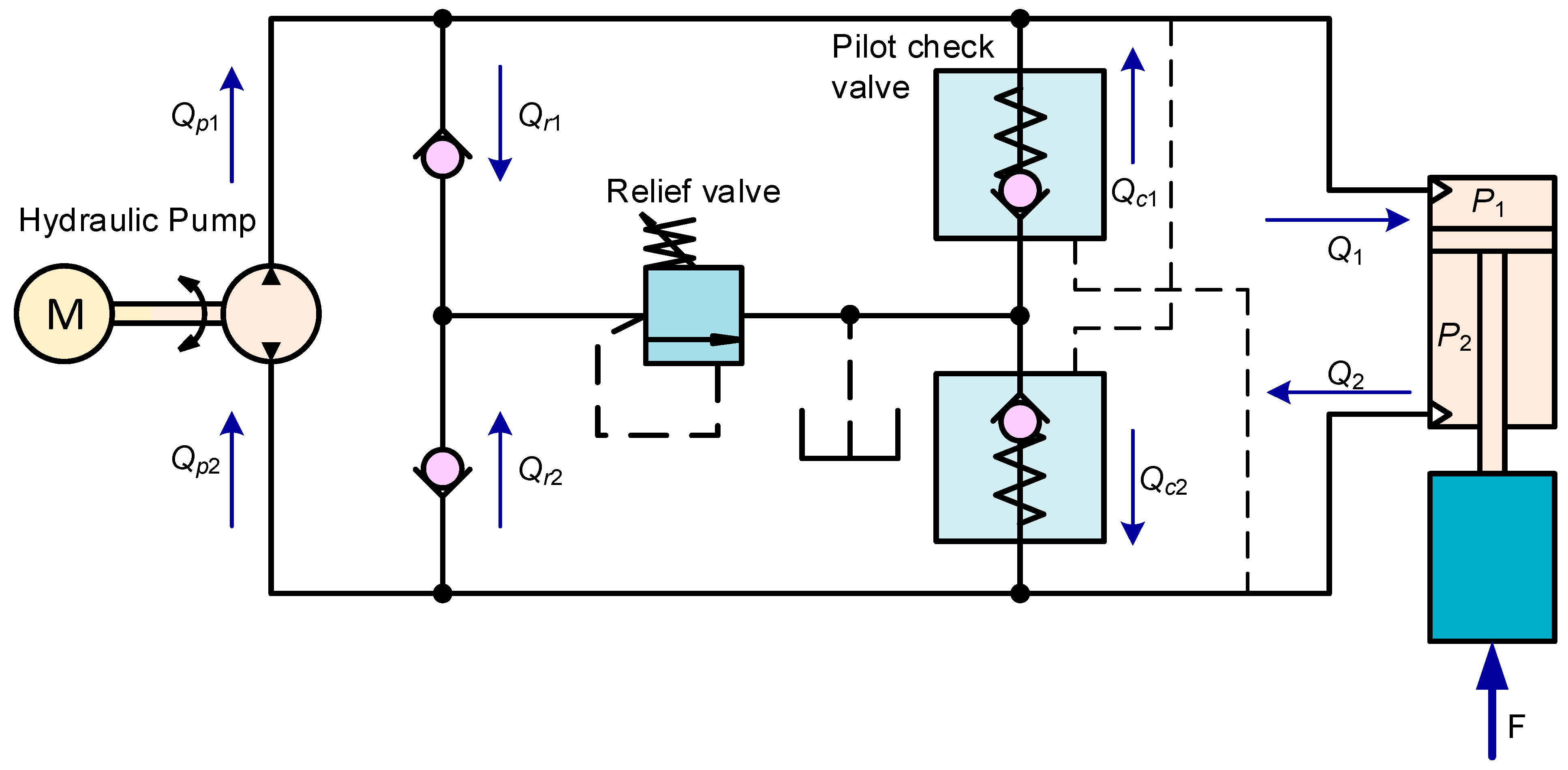
The operational mechanics of the electro-hydraulic actuator involves a closed-loop hydraulic circuit that eliminates pressure loss caused by valve orifice areas (
Figure 1). However, due to the hydraulic cylinder’s asymmetry, two pilot-operated check valves are required to provide supplementary oil volume from the tank or discharge oil volume to the tank. In addition, a relief valve controls the system’s pressure through two check valves devoid of springs. The AC servo adjusts the flow rate of the bidirectional pump and fluid flow direction, with regulation performed via an adaptive fuzzy sliding mode controller.
The piston’s dynamics can be described using Newton’s second law of motion, as follows:
where,
m (mass, kg),
c (damping coefficient, N.s/m),
Ap (effective area of the piston),
a (area of the rod, in m²),
P1 and
P2 (pressure in the two chambers, Pa, depicted in
Figure 1), and
F (the externally applied load exerting on the cylinder, N).
Utilizing the fundamental principles of hydraulic transmission, the pressure in the working chamber can be calculated as shown in Equation (2).
where, the original volumes of the two chambers are represented by
V01 and
V02, and
Ri denotes the cylinder’s internal leakage resistance (
i = 1, 2), which depends on the contact length between the piston and the cylinder, the diameter of the piston, the oil viscosity, and the radius clearance. Increasing the value of
Ri lowers the leakage between two chambers of the cylinder. The flow rate (
Q1) entering chamber 1 and the flow rate (
Q2) leaving the remaining chamber are calculated using Equation (3).
The flow rate passing through the pilot-operated check valves 1 and 2 are denoted as
Qc1 and
Qc2, respectively. Conversely, the check valves without a spring that return to the tank are associated with
Qr1 and
Qr2 flow rates.
Qp1 and
Qp2 are the flow rates at the outlet and inlet of the pump, measured in m
3/s. The flow rate supplied by the bidirectional pump is calculated by utilizing Equation (4).
where
D is the oil volume leaving the outlet of the pump, measured in m
3/rev, while the speed of the pump shaft is symbolized by
n, measured in rev/s. Additionally,
ηv denotes the volumetric efficiency of the pump.
Given
y1 =
x,
y2 =
, and
y3 =
, the state space representation of Equations (1)–(4) is of the following form of Equation (5).
Close inspection of Equations (2)–(5) shows that the system’s state can be modified by managing the speed of the bidirectional pump powered by the AC servo motor. Thus, this reflects the primary aim of this study in developing a control technique that regulates the speed of the pump’s shaft, thereby achieving precise tracking of the cylinder’s real-time position with respect to its desired position.
3. Controller Design
The traditional sliding mode controller (SMC) is designed based on a dynamic model and has proven to be very effective for nonlinear systems. However, as presented in the previous section, the EHA has unknown and nonlinear dynamic responses. Furthermore, the dynamic model given in Equation (5) is established through simplification by ignoring factors such as friction and oil leakages. Therefore, this traditional algorithm is not easily applicable for EHA. To overcome this issue, the parameters as well as the distribution of the model are lumped as an unknown nonlinear function which is expressed approximately through Fourier series. A modified sliding mode controller is developed in which the adaptive algorithm is used to estimate the equivalent control rule created by the sliding mode controller.
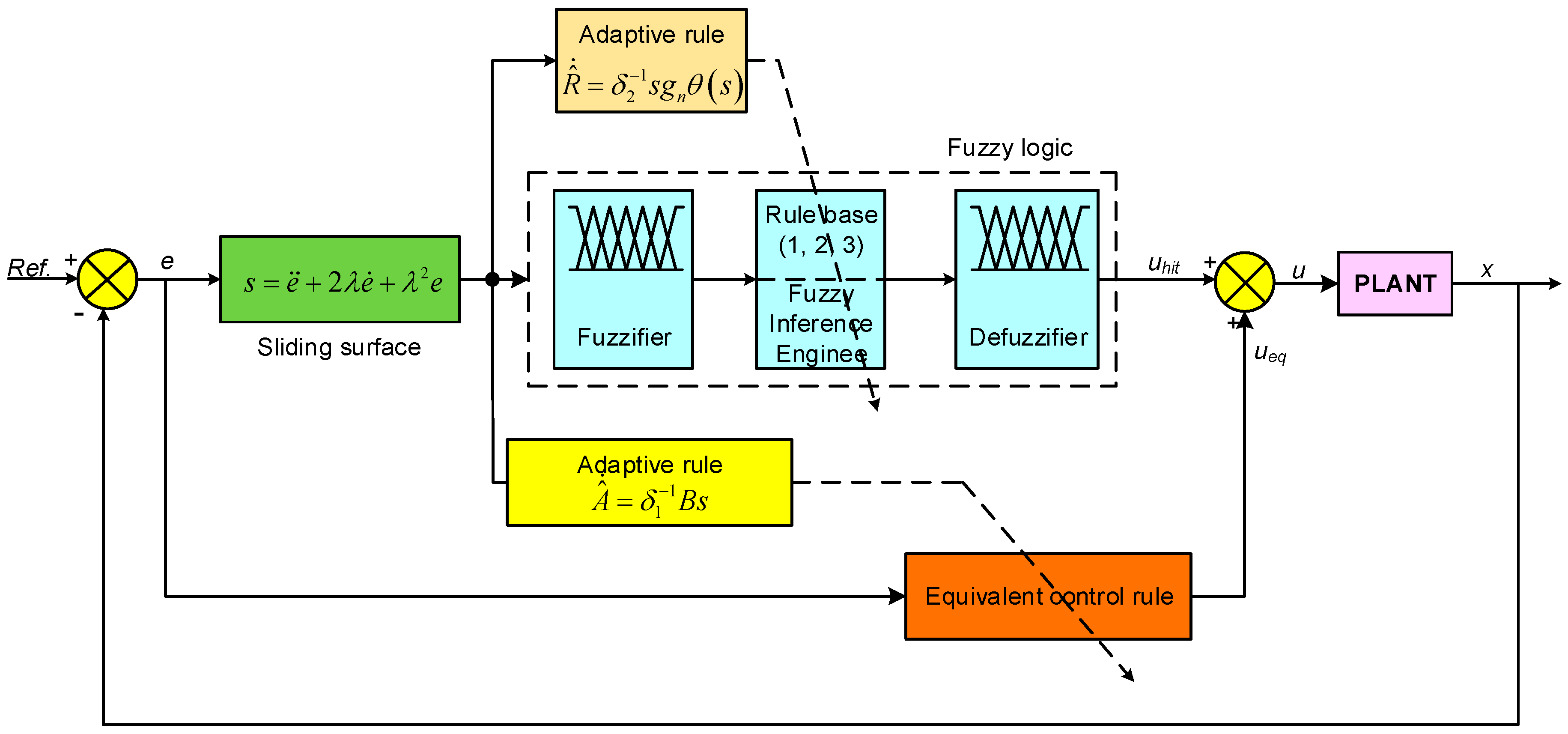
Another disadvantage of the SMC is that the hitting control action is not a continuous function with respect to time. This can cause instability and impairs the control performance. Thus, a fuzzy logic algorithm is proposed to replace the traditional hitting control action.
Figure 2 illustrates the comprehensive structure of the controller.
By inserting Equations (3)–(4) into Equation (5), a state-space model is described in the revised Equation (6).
in which,
is the external distribution
u = ω is the control signal.
Since the absolute pressure inside the working chambers is always larger than the atmosphere pressure, and to ensure the safety of the hydraulic system, the maximum system pressure (Ps) is set by the relief valve. Therefore, the pressure P1 and P2 are always smaller than the pressure Ps.
As shown in Equation (6), the function of f(y1, y2, t) reveals a dependence on the position, velocity, and pressure, meaning that it is a time varying and continuous function. Additionally, the resistance (R1 and R2) to the leakage of the cylinder is difficult to estimate in practical applications. Hence, this function is considered as lumped uncertainty and unknown. Although the parameters of β, ηv, V01, and V02 are not accurately known, their variation range in practical applications can be estimated easily. Thus, the boundary of the function g(y1, t) can also be easily estimated.
To design the controller, the following assumptions are made:
Assumption 1. The first assumption states that the function f(y1, y2, t) is a continuous unknown time-varying function whose variation boundary is not known. Hence, the function f(y1, y2, t) can be estimated utilizing a finite linear combination of fundamental functions, as shown in Equation (7).where the simulation time interval is denoted by T, and the parameter and basic function vector are referred to as A and B, respectively. An approximate error of Ɛ is also accounted for in the analysis. Based on the universal approximation theorem given by [
38], there exists a unique parameter vector
A* to minimize the function approximation error. From Equation (7), we have Equation (8) shown as below.
Assumption 2. The function g(y1, t) is not known, but its boundary is known and can be estimated using Equation (9).
The support for
based on the fact that
gn is a nominal value that is known, and represents the uncertain value, which is bounded as shown in Equation (10).
Assumption 3. The atmospheric pressure and supplied pressure are represented by Patm and Ps, respectively, and p1 and p2 are bounded within the range Patm ≤ p1, p2 ≤ Ps. The AFSMC is derived by defining the sliding surface (s) as follows:in which λ is the convergent rate of the error on the sliding surface, where λ > 0. The error (e), which is defined as the difference between the reference value xref and the actual response value x of the mass, is used in this context. Taking the time derivative of
s, which is obtained by inserting Equation (12) into Equation (11), yields the following dynamics for s:
To rewrite the dynamics of the signal
s, Equations (6) and (8) are substituted into Equation (13):
where,
The equivalent action (
ueq) control strategy can be used to determine the control action required to obtain a solution of
= 0, irrespective of the lumped function
L(t).
The accuracy value of
A* is difficult to obtain in practical application. By introducing
as the estimated parameter vector of
A*, the estimated equivalent action of
ueq is presented as follows:
To ensure the sliding condition (
), it is necessary to incorporate an additional control action known as the hitting control action (
uhit).
where, the hitting control gain, denoted as
η > 0, is utilized. The overall control law is subsequently determined through calculation:
To rewrite the dynamics of the sliding surface (
s), we can insert Equation (18) into Equation (14), yielding Equation (19).
Herein,
denotes the estimated vector, we opt for the Lyapunov function candidate presented in Equation (20).
in which
QA is the matrix of learning rate, is positive definite and symmetric.
Considering the time derivative of
V and applying Equation (17) results in Equation (21).
The adaptive rule is chosen as follows:
Thus, Equation (21) is written as:
To ensure the stability condition (
) is met, the following condition for a positive constant
η must be fulfilled:
According to Equation (24), the η value is reliant on the upper limit of
L(t). However, in practical scenarios, it is challenging to obtain the precise value of the bounding function, ∆
g, as mentioned in condition (10). Additionally,
Ɛ is an unknown quantity as stated in assumption 1, which makes it challenging to accurately determine the limit of
L(t). If the boundary selected for
L(t) is excessively large, it will result in severe chattering and indicate system dynamic instability due to the hitting control action. On the other hand, if the boundary selected is too small, the stability condition will not be fulfilled. Therefore, the boundary of function
L(t) is assumed to be unknown. To mitigate the impact of chattering, a saturation function is incorporated as follows:
where,
ψ is the thickness of the boundary layer.
Replacing the signum function by the saturation function given in Equation (25), the overall control law (18) can be rewritten as shown in Equation (26).
Similarly, the derivative of the Lyapunov function is obtained as follows:
In the case of , Equation (27) returns Equation (23), meaning that the challenge of the choice is similar to the signum function. This is also one of the difficult issues for reducing or releasing the chattering phenomenon by using the saturation function.
To determine the hitting control action (
uhit), a fuzzy logic algorithm is utilized in this study due to its effectiveness in addressing the problem of accurately determining the bound of
L(t) and the presence of unknown factors in the system. As can be observed in the hitting control action Equation (17) or Equation (25), the dependence of
uhit on the sliding surface (
s) is apparent. Therefore, the sliding surface (
s) is considered as the input linguistic variable of the fuzzy logic system, while the hitting control action serves as the output linguistic variable. The input and output linguistic variables are composed of seven different linguistic states, namely, negative big (
NB), negative medium (
NM), negative small (
NS), zero (
Z), positive small (
PS), positive medium (
PM), and positive big (
PB). These linguistic variables and the corresponding membership functions are illustrated in
Figure 3.
As shown in Equation (19), the time derivation of s is increased or reduced according to the reduction or increase in the uhit, respectively. Hence, the fuzzy law is designed as follows: the values of s and uhit are of the same sign and linguistic variable. Thus, if s has a largely negative value, uhit should be increased to a largely negative value, which indicates that will be a largely positive value to rapidly move the state of the system from to s = 0. For the case in which s is a negative and small value but uhit still remains a negative and big value, the state of the system can move away from the sliding surface. This leads to the unstable control response. When the sliding phase (s = 0) is reached, the hitting control action is cancelled, meaning uhit = 0.
The rules governing the determination of the uhit value based on the sliding surface s are as follows:
Law 1: If s equals Z, the uhit value will also be Z.
Law 2: If s equals PS, the uhit value will be PS.
Law 3: If s equals PM, the uhit value will be PM.
Law 4: If s equals PB, the uhit value will be PB.
Law 5: If s equals NS, the uhit value will be NS.
Law 6: If s equals NM, the uhit value will be NM.
Law 7: If s equals NB, the uhit value will be NB.
By applying the center-average method, the output variable can be derived as follows:
In this case, the firing strengths of each rule, denoted by
μi (0 ≤
μi ≤ 1) where
i = 0, 1, …, 6, play a crucial role in determining the output variable. Additionally, the parameters
r0,
r1,
r2,
r3,
r4,
r5, and
r6 refer to the centers of the membership functions of the output variable’s linguistic states
Z,
PS,
PM,
PB,
NS,
NM, and
NB, respectively. To specify these parameters, we employ the following selections in Equation (29).
The presence of the fuzzy parameter
r is a notable feature of the equation. Owing to the particularity of
, the following equivalence can be obtained. Thus, it is possible to rewrite Equation (28) as follows.
Equation (30) revealed that
sθ(
s) > 0. By replacing
uhit in Equation (17) by Equation (30), time derivation of the sliding surface is rewritten as shown in Equation (31).
Thus, Equation (21) is rewritten as shown in Equation (32).
To fulfill the requirement of the sliding condition of Equation (32), it is necessary for the fuzzy parameter
r to meet the following condition in Equation (33).
In the same manner as parameter vector
A, a unique value (
r*) exists to obtain minimum control action, given as:
where
δ is a positive constant
Determining an exact value for
r* in practical applications is often unattainable. Therefore, a straightforward adaptive algorithm is utilized to approximate the optimal value of
r*. The controlling rule of the AFSMC is expressed as:
In which is considered as the estimated value of the r* optimal value.
By inserting Equation (15) into Equation (35), and then rearranging as shown in Equation (36) we obtain.
The dynamic of
s is rewritten as:
Given
, Equation (37) is rearranged to obtain Equation (38).
Currently, the Lyapunov candidate function is defined as:
By differentiating
V with respect to time and applying Equation (39), the following expression is obtained:
and
=
and
=
, if the adaptive rules are designed as follows:
where
δ1 and
δ2 are the positive constants:
As
sθ(s) > 0, by inserting Equation (41) into Equation (40) and then rearranging, Equation (40) can be expressed in the following form:
By substituting Equation (34) into Equation (42), we simplify and obtain the convergence condition as in Equation (43).
Consequently, in accordance with Lyapunov stability theory, the control system is deemed stable. Utilizing Barbalat’s lemma (Astrom and Wittenmark [
39]), it can be inferred that the error will converge to zero.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}