

Development of a Deformable Water-Mobile Robot
Abstract
:1. Introduction
2. Robot Structure
2.1. Functional Requirements of Robots
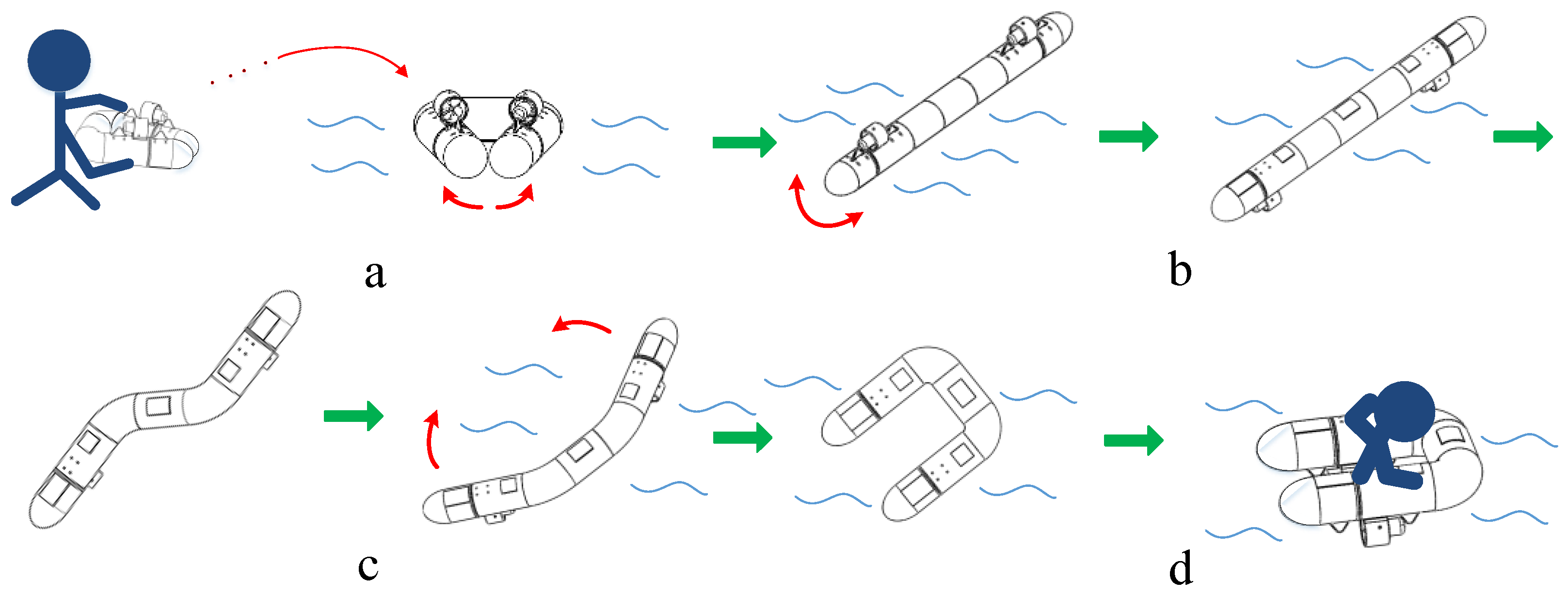
2.2. Principle of Configuration
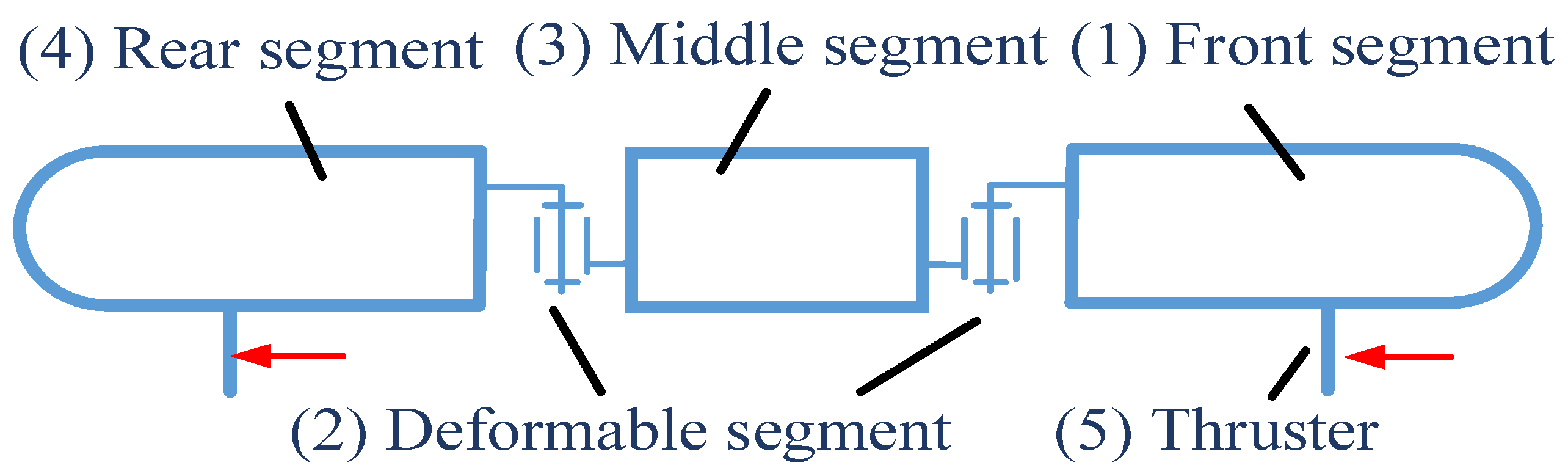
2.3. Structural Design of Robots
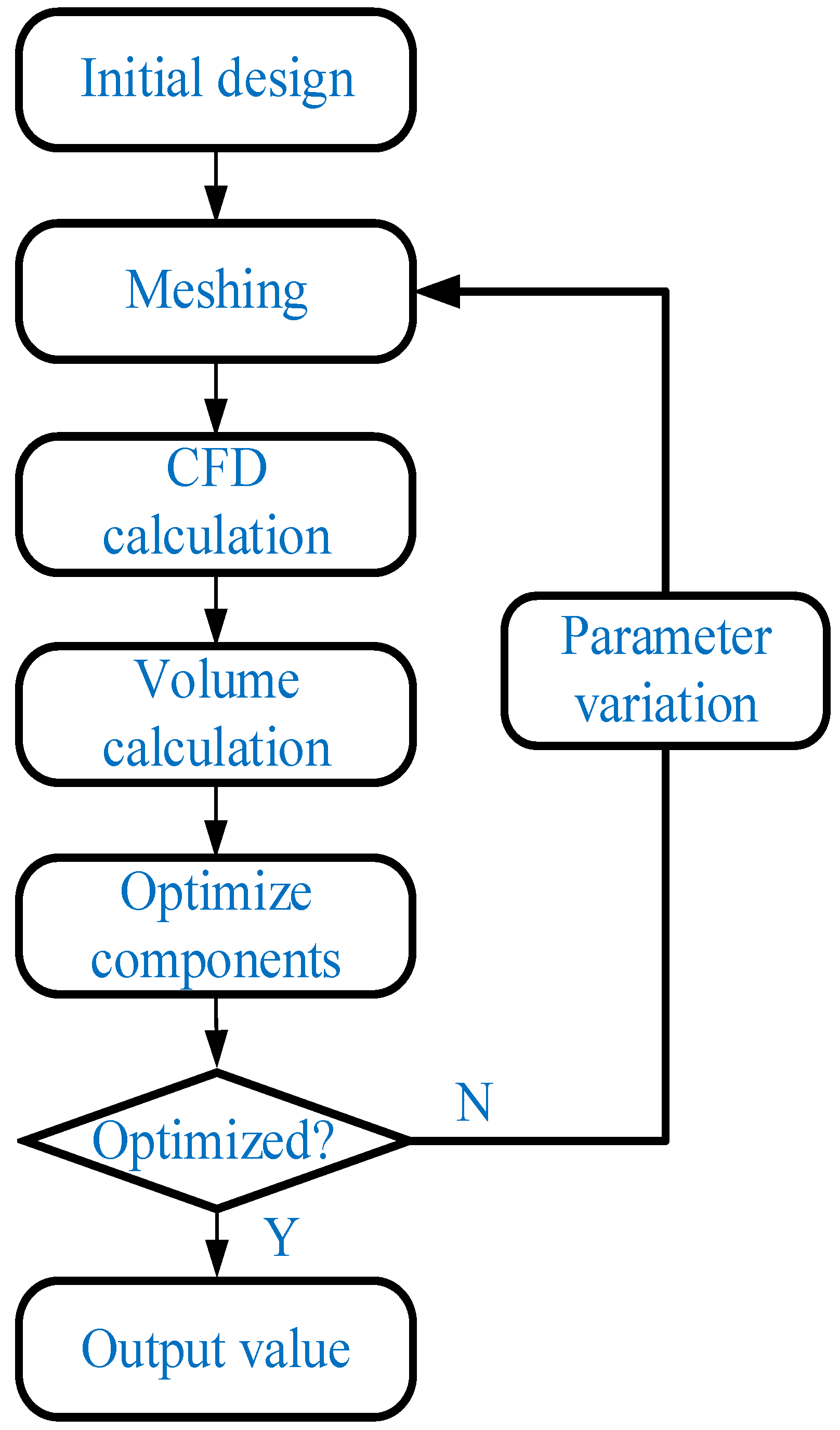
3. Shape Optimization Analysis
3.1. Force Analysis
3.2. Fluid Dynamics Control Equations and Turbulence Models
3.3. Determination of Objective Function and Constraint Conditions
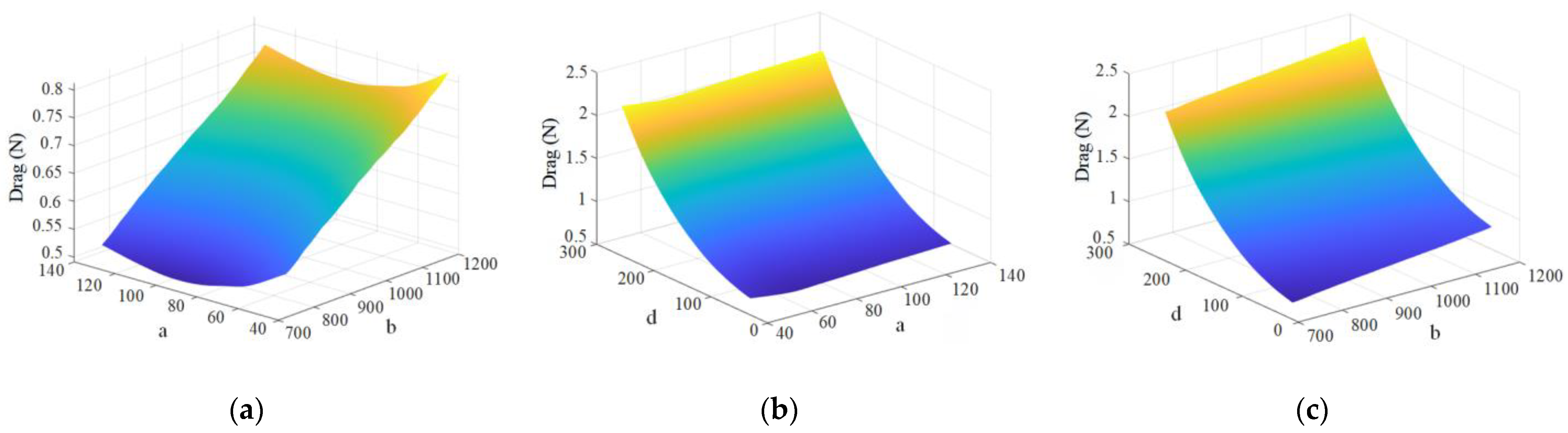
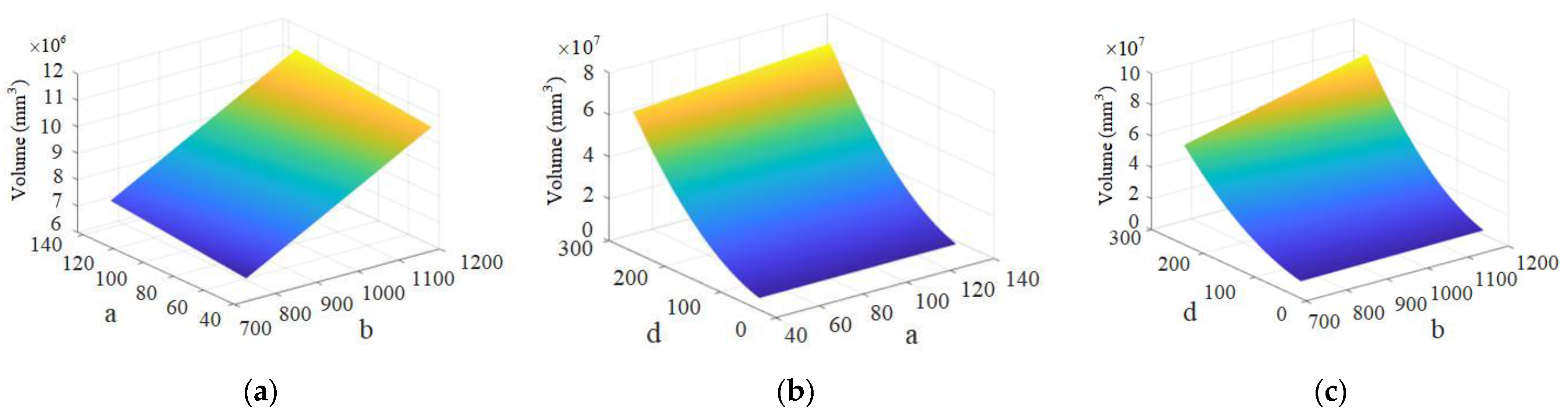
3.4. Simulation Analysis
4. U-Shaped Floating State Analysis
4.1. Center of Gravity Calculation
4.2. Buoyancy Center Calculation
4.3. Floating State Analysis
5. Robot Prototype Experiment
5.1. Robot Prototype
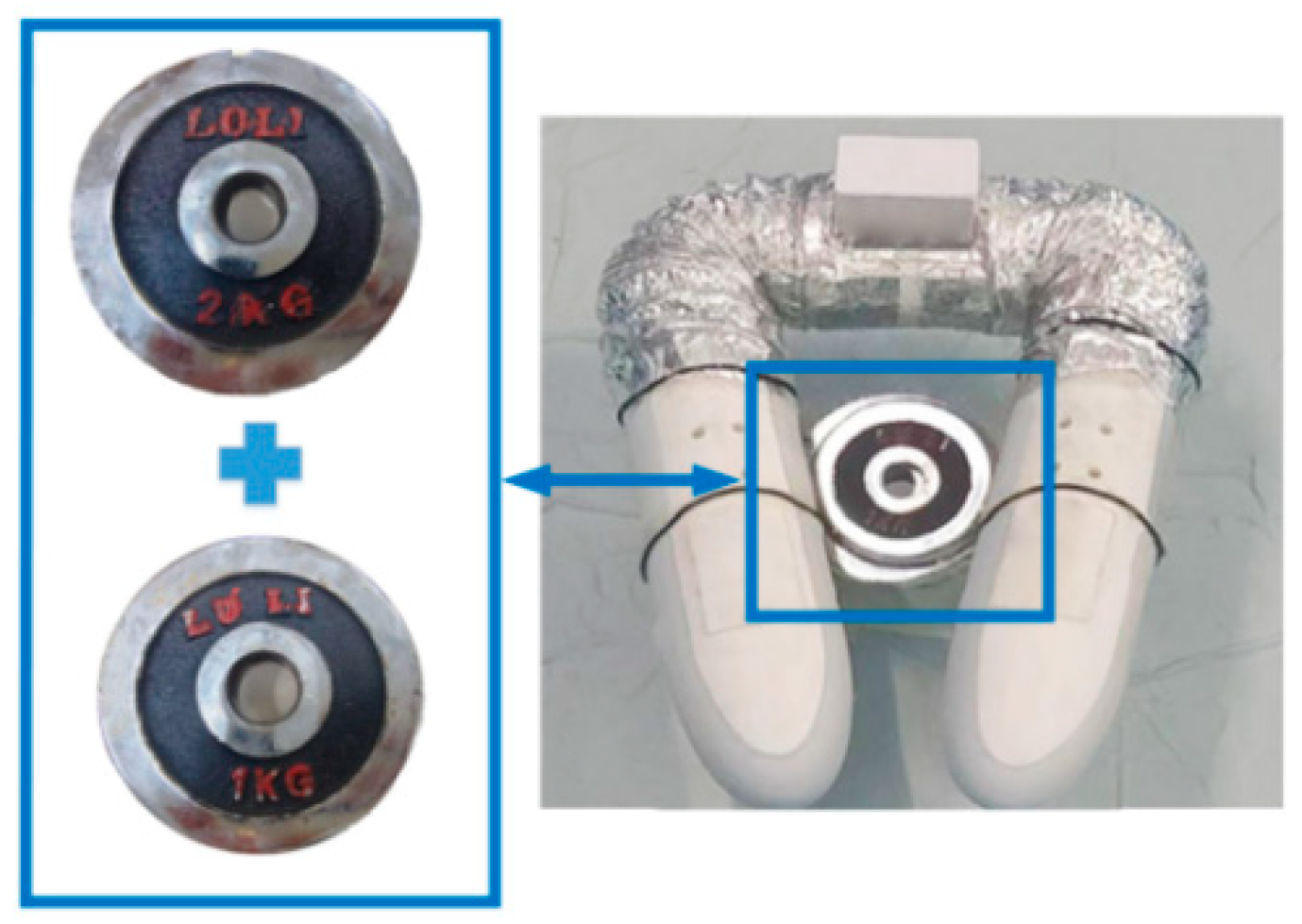
5.2. Bearing Capacity Test Experiment
5.3. Robot-Throwing Expansion Experiment
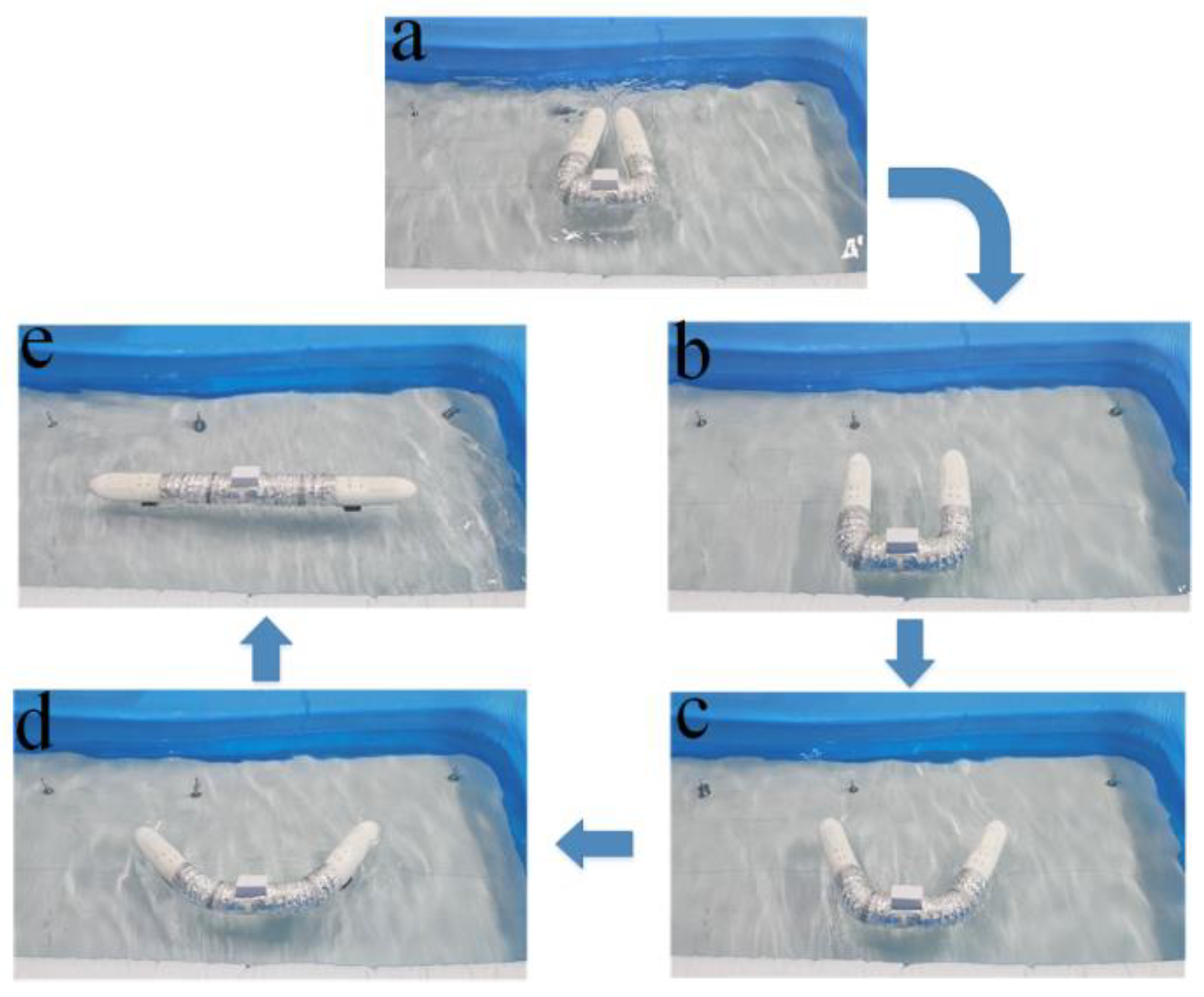
5.4. Automatic Attitude Adjustment Experiment
5.5. Oscillating Motion Experiment
5.6. Direct Flight Motion Test
5.7. Horizontal Rotary Motion Experiment
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
Appendix C
References
- Kim, T.; Choi, J.; Lee, Y.; Choi, H.-T. Development of a Multi-Purpose Unmanned Surface Vehicle and Simulation Comparison of Path Tracking Methods. In Proceedings of the 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), Xi’an, China, 19–22 August 2016; pp. 447–451. [Google Scholar]
- Le, Y. Research on Waterjet Propulsion and Navigation Control of Unmanned Vehicles. Master’s Thesis, Zhejiang University, Hangzhou, China, 2019. [Google Scholar]
- Zong, Z.; Sun, Y.; Jiang, Y. Experimental Study of Controlled T-Foil for Vertical Acceleration Reduction of a Trimaran. J. Mar. Sci. Technol. 2019, 24, 553–564. [Google Scholar] [CrossRef]
- Goulon, C.; Le Meaux, O.; Vincent-Falquet, R.; Guillard, J. Hydroacoustic Autonomous Boat for Remote Fish Detection in LakE (HARLE), an Unmanned Autonomous Surface Vehicle to Monitor Fish Populations in Lakes. Limnol. Oceanogr. Methods 2021, 19, 280–292. [Google Scholar] [CrossRef]
- Makhsoos, A.; Mousazadeh, H.; Mohtasebi, S.S.; Abdollahzadeh, M.; Jafarbiglu, H.; Omrani, E.; Salmani, Y.; Kiapey, A. Design, Simulation and Experimental Evaluation of Energy System for an Unmanned Surface Vehicle. Energy 2018, 148, 362–372. [Google Scholar] [CrossRef]
- Morge, A.; Pelle, V.; Wan, J.; Jaulin, L. Experimental Studies of Autonomous Sailing with a Radio Controlled Sailboat. IEEE Access 2022, 10, 134164–134171. [Google Scholar] [CrossRef]
- Johnston, P.; Pierpoint, C. Deployment of a Passive Acoustic Monitoring (PAM) Array from the AutoNaut Wave-Propelled Unmanned Surface Vessel (USV). In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017; pp. 1–4. [Google Scholar]
- Poole, M.; Johnston, P. Autonomous surveying of shallow coastal waters for clean seas and shorelines: Coastal monitoring of water quality. Hydro Int. 2017, 21, 24–27. [Google Scholar]
- Wang, K.; Ma, Y.; Shan, H.; Ma, S. A Snake-Like Robot with Envelope Wheels and Obstacle-Aided Gaits. Appl. Sci. 2019, 9, 3749. [Google Scholar] [CrossRef]
- Nguyen, Q.V.; Chan, W.L. Development and flight performance of a biologically-inspired tailless flapping-wing micro air vehicle with wing stroke plane modulation. Bioinspir. Biomim. 2018, 14, 016015. [Google Scholar] [CrossRef] [PubMed]
- Picardi, G.; Laschi, C.; Calisti, M. Model-Based Open Loop Control of a Multigait Legged Underwater Robot. Mechatronics 2018, 55, 162–170. [Google Scholar] [CrossRef]
- Yang, W.; Zhang, W. A Worm-Inspired Robot Flexibly Steering on Horizontal and Vertical Surfaces. Appl. Sci. 2019, 9, 2168. [Google Scholar] [CrossRef]
- Yan, J.; Yang, K.; Liu, G.; Zhao, J. Flexible driving mechanism inspired water strider robot walking on water surface. IEEE Access 2020, 8, 89643–89654. [Google Scholar] [CrossRef]
- Nađ, Đ.; Mišković, N.; Mandić, F. Navigation, Guidance and Control of an Overactuated Marine Surface Vehicle. Annu. Rev. Control. 2015, 40, 172–181. [Google Scholar] [CrossRef]
- Inoue, T.; Shiosawa, T.; Takagi, K. Dynamic Analysis of Motion of Crawler-Type Remotely Operated Vehicles. IEEE J. Ocean. Eng. 2013, 38, 375–382. [Google Scholar] [CrossRef]
- Huang, H.; Sheng, C.; Wu, G.; Shen, Y.; Wang, H. Stroke Kinematics Analysis and Hydrodynamic Modeling of a Buoyancy-Supported Water Strider Robot. Appl. Sci. 2020, 10, 6300. [Google Scholar] [CrossRef]
- Changlong, Y.; Rui, W.; Yingxin, S.; Bing, W.; Biao, T.; Borui, Z.; Linglong, G.; Jiaqi, F. A Snake-Like Surface Rescue Robot and Its Control Method. CN Patent 111874185 A, 2 February 2022. [Google Scholar]
- Wang, M.; Tian, Y.; Yang, S.; Wang, P. Study on the Calculation Method of Water Inflow Velocity of Loose Rock Landslide. Sustainability 2022, 14, 12767. [Google Scholar] [CrossRef]
- Anderson, J.D. Basic Methods of computational fluid dynamics. In Fundamentals and Applications of Computational Fluid Dynamics, 1st ed.; Songping, W., Zhaomiao, L., Eds.; Machinery Industry Press: Beijing China, 2019; pp. 149–193. [Google Scholar]
- Huapan, X.; Zifan, F.; Chen, Z.; Kongde, H.; Weihua, Y.; Hongzhu, D. Research on structural resistance characteristics of underwater streamline body and its application. J. Three Gorges Univ. 2013, 35, 92–96. [Google Scholar]
- Song, B.; Lyu, D.; Jiang, J. Optimization of Composite Ring Stiffened Cylindrical Hulls for Unmanned Underwater Vehicles Using Multi-Island Genetic Algorithm. J. Reinf. Plast. Compos. 2018, 37, 668–684. [Google Scholar] [CrossRef]
- Pang, Y.; Wamg, Y.; Yang, Z.; Gao, T. Myring type rotary hull direct sailing drag calculation and boat type optimization. J. Harbin Eng. Univ. 2014, 35, 1093–1098. [Google Scholar]
- Peng, D. Research on Multi-Objective Optimal Design of Three-Body Combined Autonomous Underwater Vehicle Based on Parameterization. Master’s Thesis, South China University of Technology, Guangzhou, China, 2020. [Google Scholar]
- Cheng, X.; Feng, B.; Liu, Z.; Chang, H. Hull Surface Modification for Ship Resistance Performance Optimization Based on Delaunay Triangulation. Ocean. Eng. 2018, 153, 333–344. [Google Scholar] [CrossRef]
- Zhang, W.; Li, Y.; Liao, Y.; Jia, Q.; Pan, K. Hydrodynamic Analysis of Self-Propulsion Performance of Wave-Driven Catamaran. J. Mar. Sci. Eng. 2021, 9, 1221. [Google Scholar] [CrossRef]
- Vasilescu, M.-V.; Dinu, D. Influence of Flettner Balloon, Used as Wind Energy Capturing System, on Container Ship Stability. In E3S Web of Conferences, Proceedings of the 9th International Conference on Thermal Equipments, Renewable Energy and Rural Development (TE-RE-RD 2020), Constanta, Romania, 26–27 June 2020; EDP Sciences: Les Ulis, France, 2020; Volume 180, p. 02004. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Initial Value | Optimization Value |
|---|---|---|
| a (mm) | 90 | 103 |
| b (mm) | 1000 | 1100 |
| d (mm) | 100 | 96 |
| Volume (mm3) | 8,796,459 | 8,956,103 |
| Drag (N) | 0.512 | 0.455 |
| Parameter Name | Optimization Value |
|---|---|
| Size (mm) | 1306 × 96 × 168 |
| Weight (kg) | 3.5 |
| Movement speed (m/s) | 0.678 |
| Control range (m) | 500 |
| Effective bearing capacity (kg) | 3–4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, C.; Su, Y.; Yu, S.; Wang, Y. Development of a Deformable Water-Mobile Robot. Actuators 2023, 12, 202. https://doi.org/10.3390/act12050202
Ye C, Su Y, Yu S, Wang Y. Development of a Deformable Water-Mobile Robot. Actuators. 2023; 12(5):202. https://doi.org/10.3390/act12050202
Chicago/Turabian StyleYe, Changlong, Yang Su, Suyang Yu, and Yinchao Wang. 2023. "Development of a Deformable Water-Mobile Robot" Actuators 12, no. 5: 202. https://doi.org/10.3390/act12050202