
Design and Analysis of a High Power Density Permanent Magnet Linear Generator for Direct-Drive Wave Power Generation


Abstract
:1. Introduction
2. Analytical Calculation of PMLG
2.1. Electromagnetic Calculation of PMLG
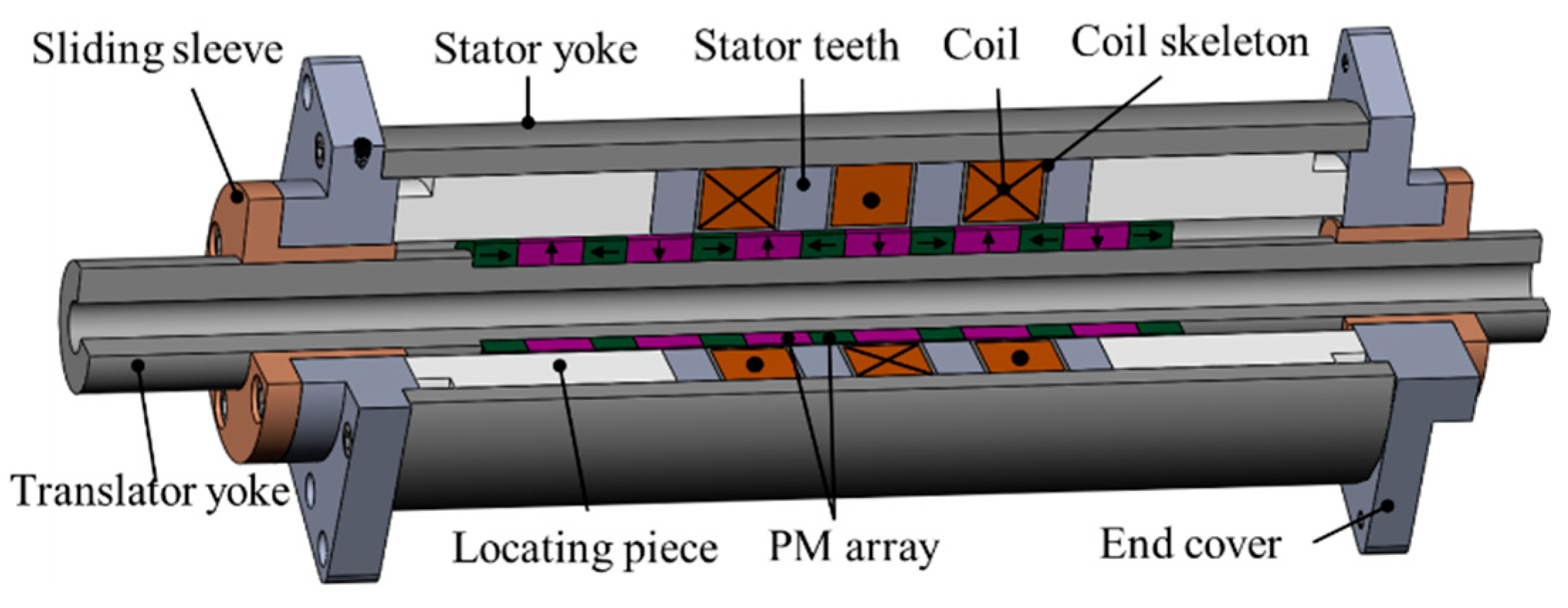
2.2. Stator Design
3. Analysis of Equivalent Magnetic Circuit Model
4. Finite Element Analysis and Structure Optimization of PMLG
4.1. Model Establishment and Result Analysis
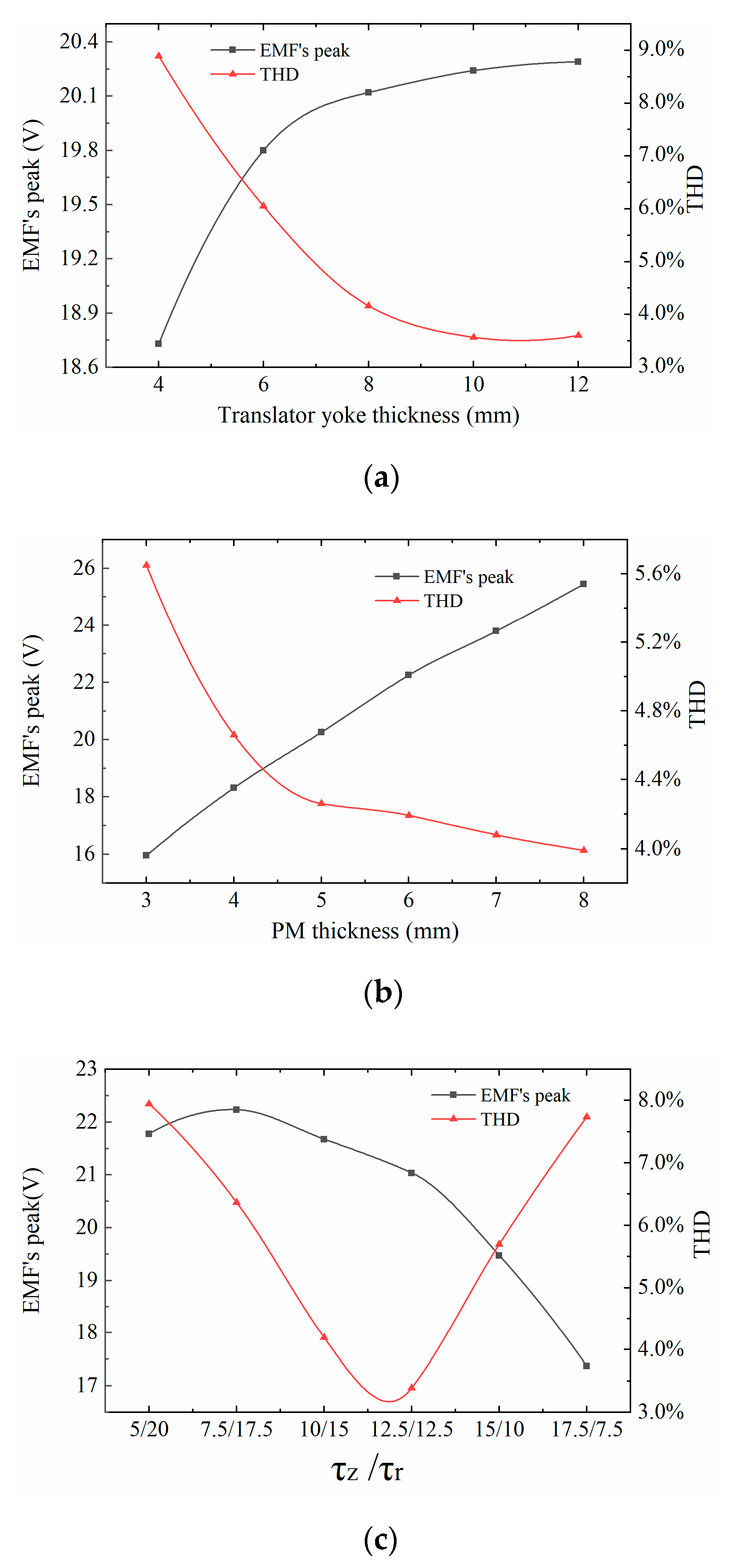
4.2. Translator Structure Analysis
4.3. Stator Structure Analysis
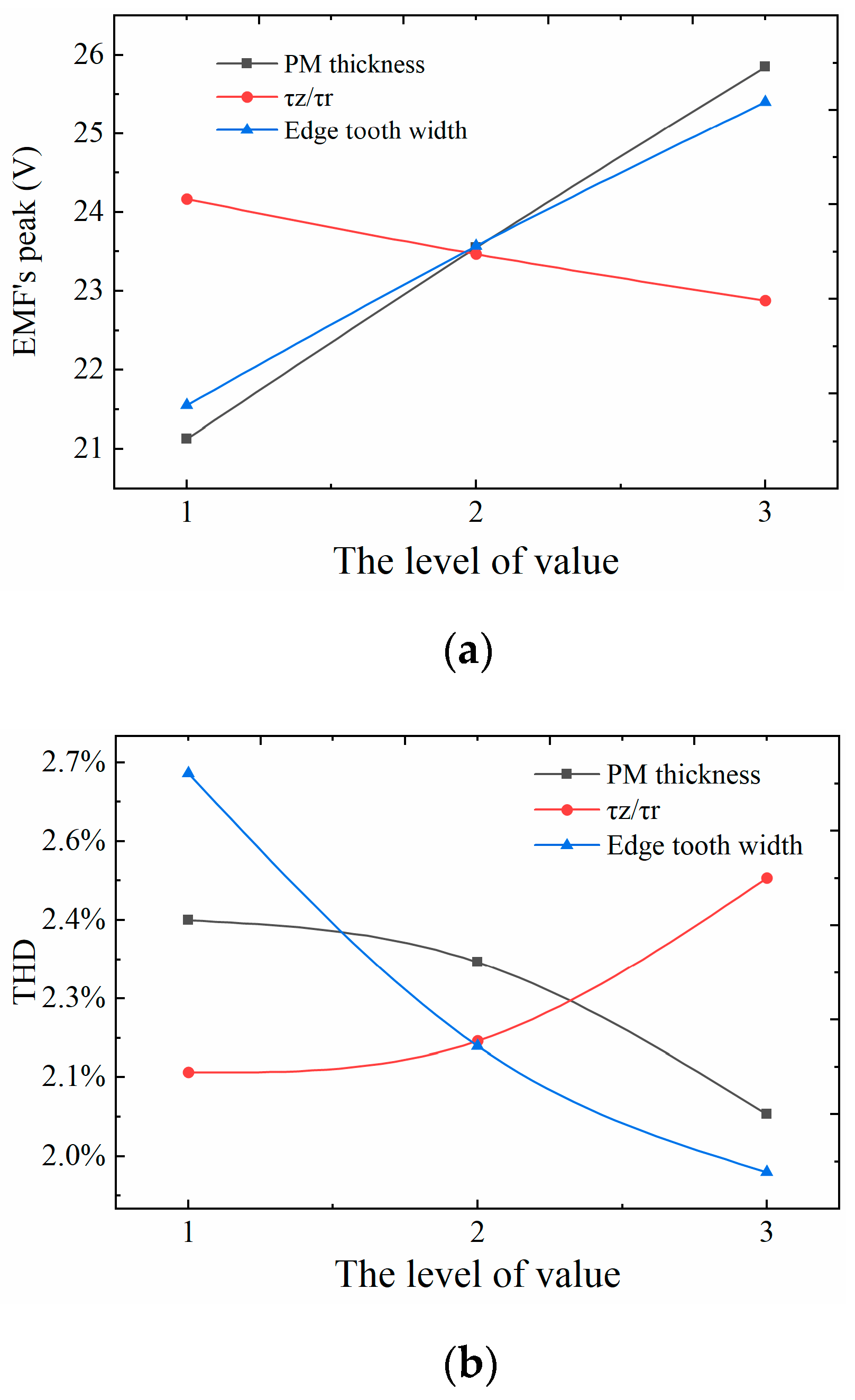
4.4. Orthogonal Design Optimization Analysis
5. Experimental Analysis
5.1. Experimental Analysis of Steady State Performance
5.2. Dynamic Experimental Analysis under No Load Condition
5.3. Dynamic Experimental Analysis under Load Condition
6. Conclusions
- The thickness of the PM, the width of the edge tooth, and the axial length ratio of the axial and radial magnetized PM have a greater influence on the peak and the THD of the EMF. With the increase of PM thickness and edge tooth width, the EMF’s peak increases proportionally, and the THD decreases gradually. In the Halbach array, when the length of the radial magnetized PM is closer to the length of the intermediate tooth, the peak of the EMF is larger. The smaller the axial size difference between the axial and radial magnetized PM, the smaller the THD will be. The THD will be the smallest when the axial and radial magnetized PM are equal in size.
- The orthogonal design method is used to study the influences of three factors, including the thickness of the PM, the width of the edge teeth, and the ratio of the axial length of the axial and radial magnetized PM. The ideal structural parameters are hM = 7 mm, = 11.5/13.5, and an edge teeth width of 11 mm. Finally, the optimal combination of PMLG structural parameters is obtained.
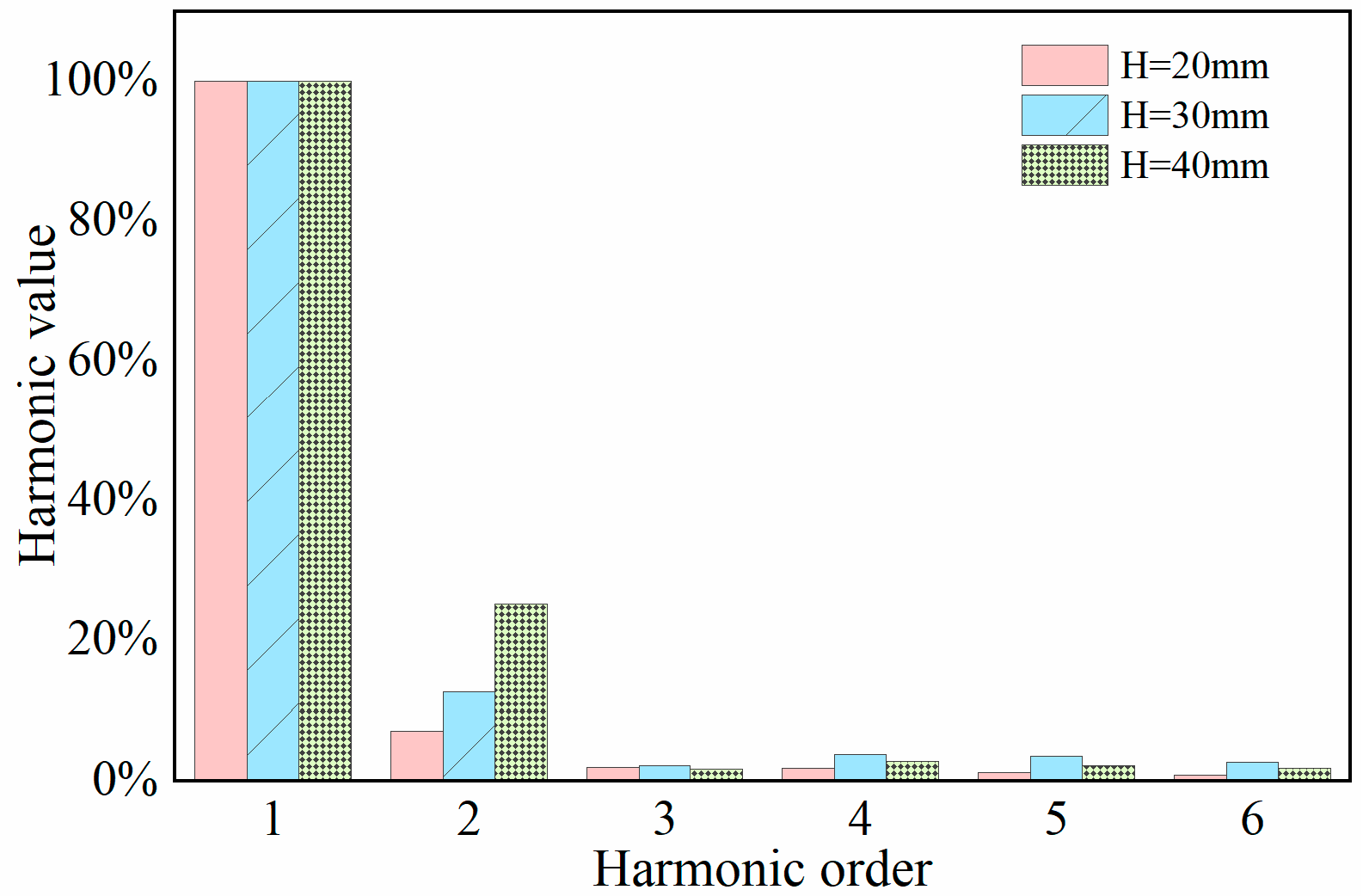
- The EMF’s peak is related to the movement stroke and frequency; in fact, it increases as the movement stroke and frequency increases. The EMF waveform period increases with the decrease of the motion frequency, which in fact is 0.5 times related to the motion period. The EMF’s THD is correlated with the stroke, that is, the THD is low, and the sine characteristic of the waveform is better when the motion stroke is less than the PM pole distance. The waveform will show some distortions when the motion stroke is greater than the pole distance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Y.; Luo, K.; Tao, R.; Wang, Z.; Chen, D.; Shao, Z. A new concept and strategy for photovoltaic and thermoelectric power generation based on anisotropic crystal facet unit. Adv. Funct. Mater. 2020, 30, 2002606. [Google Scholar] [CrossRef]
- Li, Y.; Wang, Z.; Tao, R.; Fan, Y.; Xu, J.; Yu, L.; Ren, N.; Wu, J.; Chen, D.; Shao, Z. Preparation strategies of p-type cuprous oxide and its solar energy conversion performance. Energy Fuels 2021, 35, 17334–17352. [Google Scholar] [CrossRef]
- Dong, F.; An, X.; Li, C. Performance evaluation of wind power industry chain based on three-stage DEA. J. Renew. Sustain. Energy. 2021, 13, 033313. [Google Scholar] [CrossRef]
- Wan, Y.; Zheng, C.; Li, L.; Dai, Y.; Esteban, M.D.; López-Gutiérrez, J.S.; Qu, X.; Zhang, X. Wave energy assessment related to wave energy convertors in the coastal waters of China. Energy. 2020, 202, 117741. [Google Scholar] [CrossRef]
- Qiu, S.; Liu, K.; Wang, D.; Ye, J.; Liang, F. A comprehensive review of ocean wave energy research and development in China. Renew. Sustain. Energy Rev. 2019, 113, 109271. [Google Scholar] [CrossRef]
- Faiz, J.; Nematsaberi, A. Linear electrical generator topologies for direct-drive marine wave energy conversion-an overview. IET Renew. Power Gener. 2017, 11, 1163–1176. [Google Scholar] [CrossRef]
- Tan, C.; Lu, Y.; Ge, W.; Li, B.; Lu, J. Depth fuzzy sliding-mode active disturbance rejection control method of permanent magnet linear motor for direct drive system. J. Xi’an Jiaotong Univ. 2023, 1, 1–9, in press. [Google Scholar]
- Hamim, M.; Ibrahim, T.; Nor, N.M. Modeling and analyze a single-phase halbach magnetized tubular linear permanent magnet generator for wave energy conversion. In Proceedings of the 2014 International Conference on Power and Energy (PECon), Kuching, Malaysia, 1–3 December 2014; pp. 87–92. [Google Scholar]
- Bode, C.; Schillingmann, H.; Henke, M. A free-piston PM linear generator in vernier topology using quasi-Halbach-excitation. In Proceedings of the 2014 International Conference on Electrical Machines (ICEM), Berlin, Germany, 2–5 September 2014; pp. 1950–1955. [Google Scholar]
- Li, W.; Chau, K.T.; Jiang, J.Z. Application of linear magnetic gears for pseudo-direct-drive oceanic wave energy harvesting. IEEE Trans. Magn. 2011, 47, 2624–2627. [Google Scholar] [CrossRef] [Green Version]
- Pan, J.F.; Li, Q.; Wu, X.; Cheung, N.; Qiu, L. Complementary power generation of double linear switched reluctance generators for wave power exploitation. Int. J. Electr. Power Energy Syst. 2019, 106, 33–44. [Google Scholar] [CrossRef]
- Di Dio, V.; Franzitta, V.; Milone, D.; Pitruzzella, S.; Trapanese, M.; Viola, A. Design of bilateral switched reluctance linear generator to convert wave energy. Adv. Mater. Res. 2014, 860, 1694–1698. [Google Scholar]
- Feng, N.; Yu, H.; Zhao, M.; Zhang, P.; Hou, D. Magnetic field-modulated linear permanent-magnet generator for direct-drive wave energy conversion. IET Electr. Power Appl. 2020, 14, 742–750. [Google Scholar] [CrossRef]
- Zamri, N.A.M.; Ibrahim, T.; Nor, N.M. Direct drive linear generator designs with aluminium spacer and alternate slot winding for wave energy conversion system. Int. J. Adv. Sci. Eng. Inf. Technol. 2017, 7, 1282. [Google Scholar] [CrossRef]
- Meng, B.; Xu, H.; Liu, B.; Dai, M.; Zhu, C.; Li, S. Novel magnetic circuit topology of linear force motor for high energy utilization of permanent magnet: Analytical modelling and experiment. Actuators 2021, 10, 32. [Google Scholar] [CrossRef]
- Abdalla, I.I.; Ibrahim, T.; Nor, N.M.; Perumal, N. Optimal design of a single-slotted permanent-magnet linear generator for wave energy conversion. Int. J. Appl. Electromagn. Mech. 2018, 56, 21–34. [Google Scholar] [CrossRef]
- Tan, C.; Ren, H.; Li, B.; Lu, J.; Li, D.; Tao, W. Design and analysis of a novel cascade control algorithm for braking-by-wire system based on electromagnetic direct-drive valves. J. Frankl. Ins. 2022, 9, 006. [Google Scholar] [CrossRef]
- Liu, C.; Chen, R.; Zhang, Y.; Liu, W.; Wang, L.; Qin, J. Design and test of a novel two-body direct-drive wave energy converter. Int. J. Appl. Electromagn. Mech. 2021, 65, 527–544. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, H.; Chen, Q.; Hu, M.; Huang, L.; Liu, Q. Design and experimental analysis of AC linear generator with Halbach PM arrays for direct-drive wave energy conversion. IEEE Trans. Appl. Supercond. 2013, 24, 1–4. [Google Scholar] [CrossRef]
- Jang, S.M.; Lee, S.H.; Cho, H.W.; Cho, S.K. Design and analysis of helical motion permanent magnet motor with cylindrical Halbach array. IEEE Trans. Magn. 2003, 39, 3007–3009. [Google Scholar] [CrossRef]
- Zhou, T.; Huang, Y.; Dong, J.; Guo, B.; Zhang, L. Design and modeling of axial flux permanent magnet machine with yokeless and segment armature using magnetic equivalent circuit. In Proceedings of the 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 618–623. [Google Scholar]
- Arslan, S.; Gurdal, O.; Akkaya Oy, S. Design and optimization of tubular linear permanent-magnet generator with performance improvement using response surface methodology and multi-objective genetic algorithm. Sci. Iran. 2020, 27, 3053–3065. [Google Scholar] [CrossRef] [Green Version]
- Fan, X.; Yin, J.; Lu, Q. Design and analysis of a novel composited electromagnetic linear actuator. Actuators 2021, 11, 6. [Google Scholar] [CrossRef]
- Tan, Y.; Lin, K.; Zu, J.W. Analytical modelling of Halbach linear generator incorporating pole shifting and piece-wise spring for ocean wave energy harvesting. AIP Adv. 2018, 8, 056615. [Google Scholar] [CrossRef]
- Li, B.; Li, D.; Ge, W.; Tan, C.; Lu, J.; Song, A. Design and analysis of a novel cascade control algorithm for braking-by-wire system based on electromagnetic direct-drive valves. China J. Highw. Transp. 2021, 34, 121–132. [Google Scholar]
- Li, Z.; Wu, Q.; Liu, B.; Gong, Z. Optimal design of magneto-force-thermal parameters for electromagnetic actuators with Halbach array. Actuators 2021, 10, 231. [Google Scholar] [CrossRef]
- Faiz, J.; Amini-Valeshani, S.; Ghods, M. Design and performance of linear Vernier generators—The state of the art and case study. Int. Trans. Electr. Energy Syst. 2021, 31, e12723. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated voltage UN/V | 25 | Stoke H/mm | ≤40 |
| Rated speed V/m/s | 0.5 | Outer diameter Ds_out/mm | ≤100 |
| Rated frequency fN/Hz | 10 | Phase m | 1 |
| Parameter | Code Name | Level Value 1 | Level Value 2 | Level Value 3 |
|---|---|---|---|---|
| hM | A | 5 | 6 | 7 |
| B | 11.5/13.5 | 12.5/12.5 | 13.5/11.5 | |
| Edge tooth width | C | 8 | 9.5 | 11 |
| Operation Number | Combination | Amplitude of EMF (V) | THD |
|---|---|---|---|
| 1 | A1B1C1 | 19.94 | 2.62% |
| 2 | A1B2C2 | 21.23 | 2.30% |
| 3 | A1B3C3 | 22.21 | 2.28% |
| 4 | A2B1C2 | 24.09 | 2.06% |
| 5 | A2B2C3 | 25.51 | 1.85% |
| 6 | A2B3C1 | 21.04 | 3.06% |
| 7 | A3B1C3 | 28.48 | 1.64% |
| 8 | A3B2C1 | 23.68 | 2.35% |
| 9 | A3B3C2 | 25.38 | 2.11% |
| Parameter | Symbol | Value | |
|---|---|---|---|
| Stator | Outer diameter | Ds_out (mm) | 90 |
| Length | lef (mm) | 100 | |
| Edge tooth width | (mm) | 11 | |
| Groove width | (mm) | 19 | |
| Winding turn | N | 660 | |
| Winding resistance | Rr (Ω) | 2.82 | |
| Translator | PM thickness | hM (mm) | 7 |
| Length | lr (mm) | 175 | |
| Outer diameter | Dr_out (mm) | 38 | |
| Radial magnetized PM | (mm) | 13.5 | |
| Axial magnetized PM | (mm) | 11.5 |
| Load (Ω) | Frequency (Hz) | Simulation EMF RMS (v) | Test EMF RMS (v) | Simulation Output Power (W) | Test Output Power (W) |
|---|---|---|---|---|---|
| 2.5 | 5 | 8.21 | 7.26 | 26.86 | 21.03 |
| 3.3 | 5.66 | 4.92 | 12.76 | 9.73 | |
| 2.5 | 4.25 | 3.56 | 7.16 | 5.06 | |
| 5 | 5 | 11.52 | 10.35 | 26.46 | 21.35 |
| 3.3 | 7.84 | 6.89 | 12.18 | 9.53 | |
| 2.5 | 5.83 | 4.75 | 6.62 | 4.54 | |
| 10 | 5 | 14.34 | 13.70 | 20.53 | 18.71 |
| 3.3 | 9.67 | 8.68 | 9.26 | 7.54 | |
| 2.5 | 7.26 | 5.86 | 5.21 | 3.52 | |
| 15 | 5 | 15.55 | 15.16 | 16.09 | 15.28 |
| 3.3 | 10.45 | 9.63 | 7.36 | 6.31 | |
| 2.5 | 7.85 | 6.68 | 4.06 | 2.93 | |
| 20 | 5 | 16.50 | 16.12 | 13.49 | 12.91 |
| 3.3 | 10.82 | 10.17 | 5.81 | 5.15 | |
| 2.5 | 8.15 | 7.18 | 3.19 | 2.52 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, X.; Wang, C.; Zhu, Z.; Meng, H. Design and Analysis of a High Power Density Permanent Magnet Linear Generator for Direct-Drive Wave Power Generation. Actuators 2022, 11, 327. https://doi.org/10.3390/act11110327
Fan X, Wang C, Zhu Z, Meng H. Design and Analysis of a High Power Density Permanent Magnet Linear Generator for Direct-Drive Wave Power Generation. Actuators. 2022; 11(11):327. https://doi.org/10.3390/act11110327
Chicago/Turabian StyleFan, Xinyu, Changkun Wang, Zhibing Zhu, and Hao Meng. 2022. "Design and Analysis of a High Power Density Permanent Magnet Linear Generator for Direct-Drive Wave Power Generation" Actuators 11, no. 11: 327. https://doi.org/10.3390/act11110327