
Driving Torque Control of Dual-Motor Powertrain for Electric Vehicles
Abstract
:1. Introduction
2. Dynamic Modelling of the EV Powertrain
2.1. Layout of the Dual-Motor Powertrain
2.2. Dynamic Model of the Powertrain
2.2.1. Motor Model
2.2.2. Transmission Model
2.2.3. Vehicle Model
3. Energy Management Strategy of the Dynamic System
3.1. Backward-Facing Dynamic Model of the Powertrain
3.2. Optimization Model of the EMS
4. Dynamic Control Strategies of the DMPAT
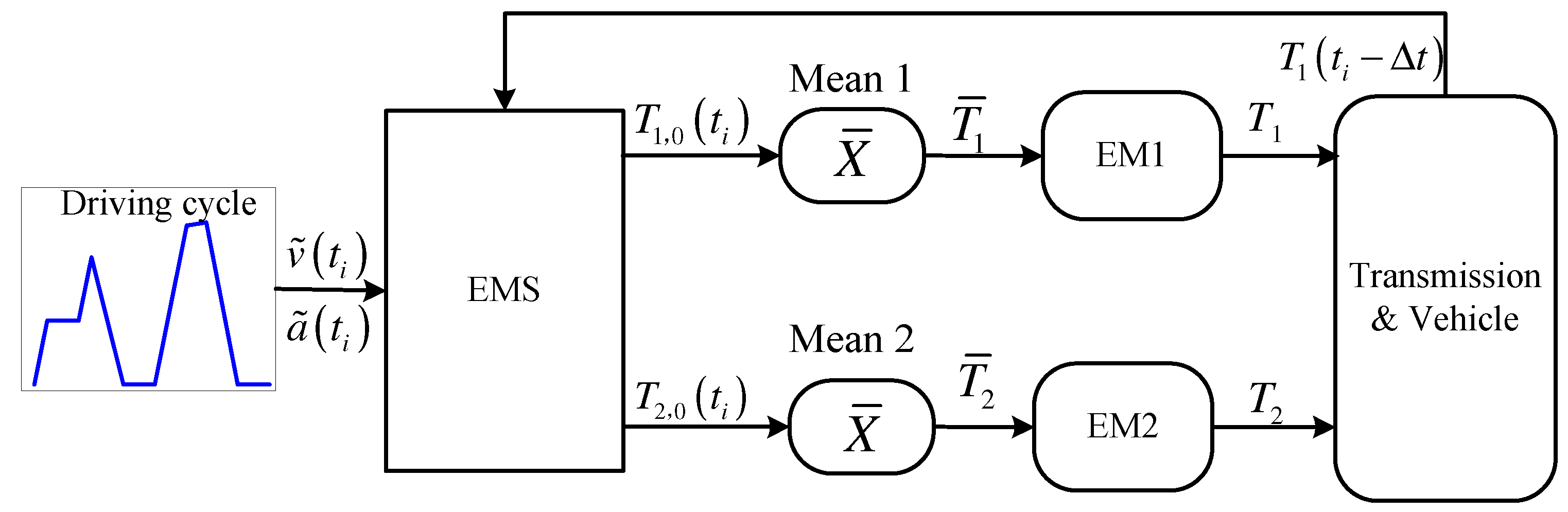
4.1. Backward Dynamic Control Strategy
4.2. Combined Forward and Backward Dynamic Control Strategy
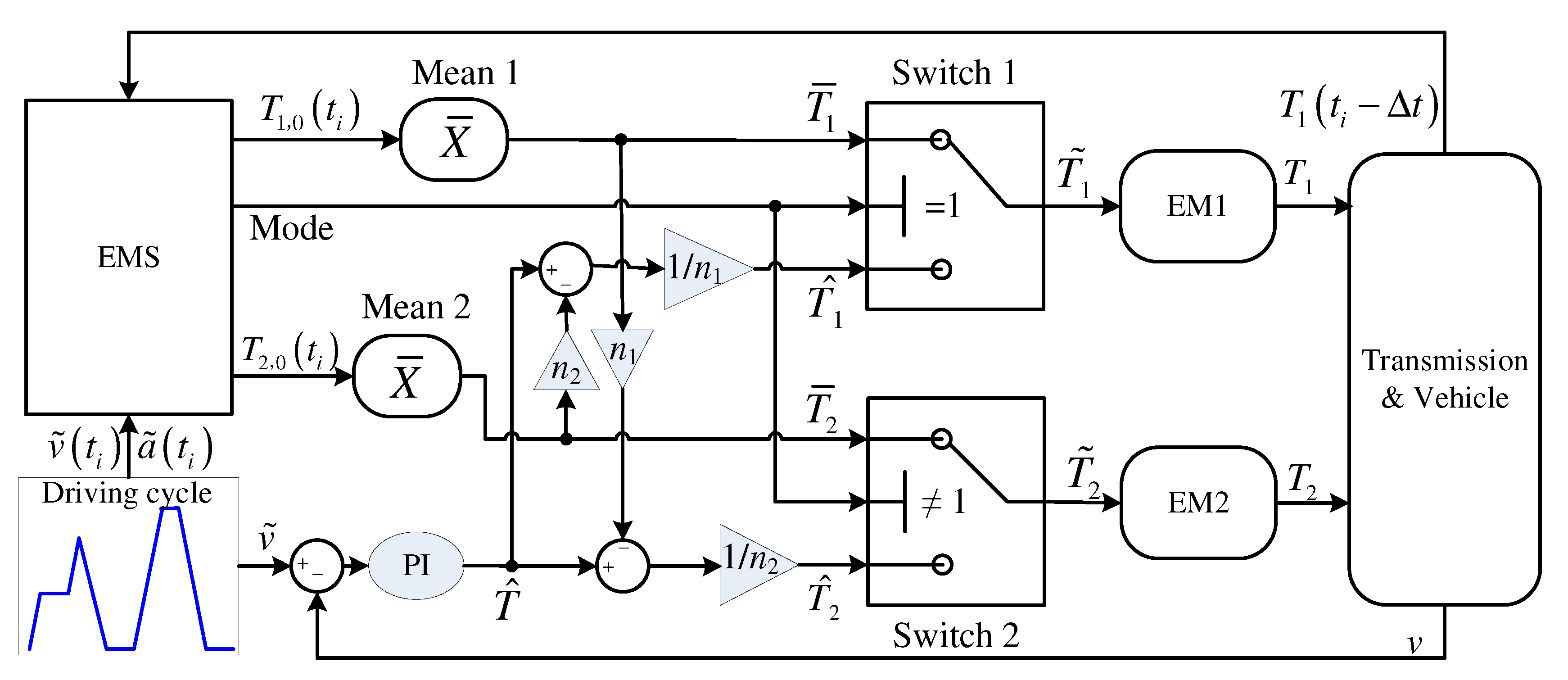
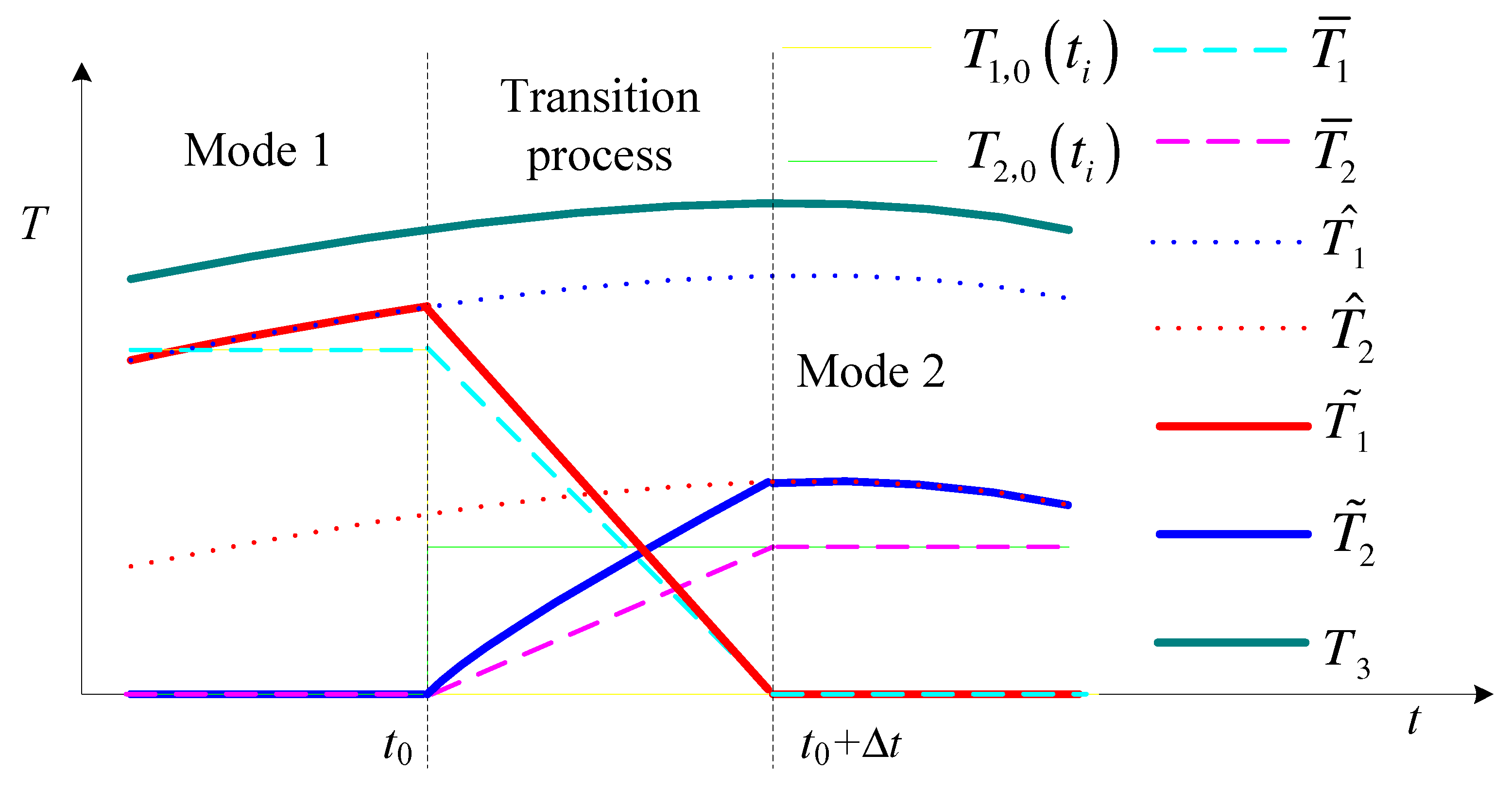
4.3. Nested Forward and Backward Dynamic Control Strategy
5. Simulation Results
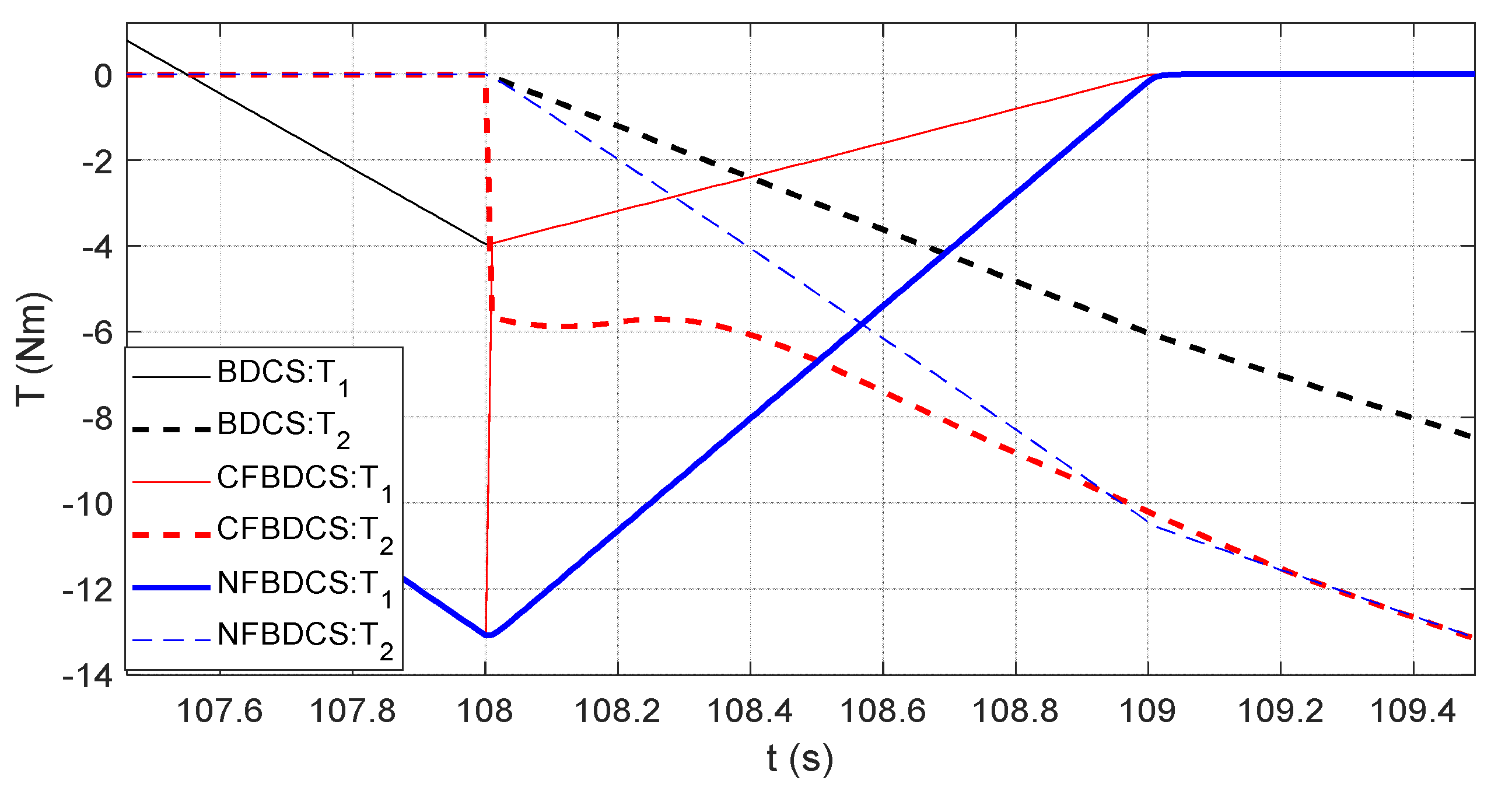
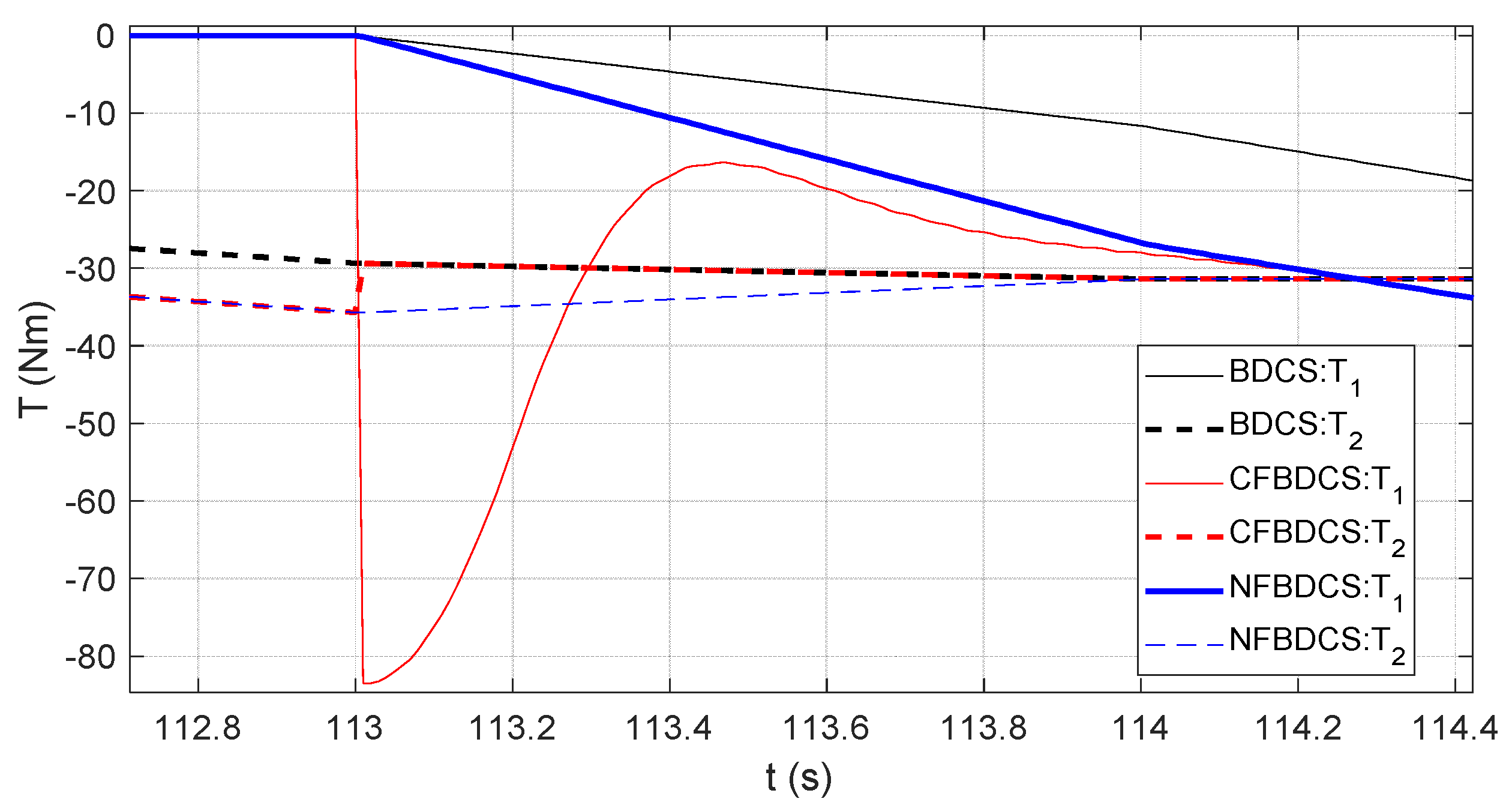
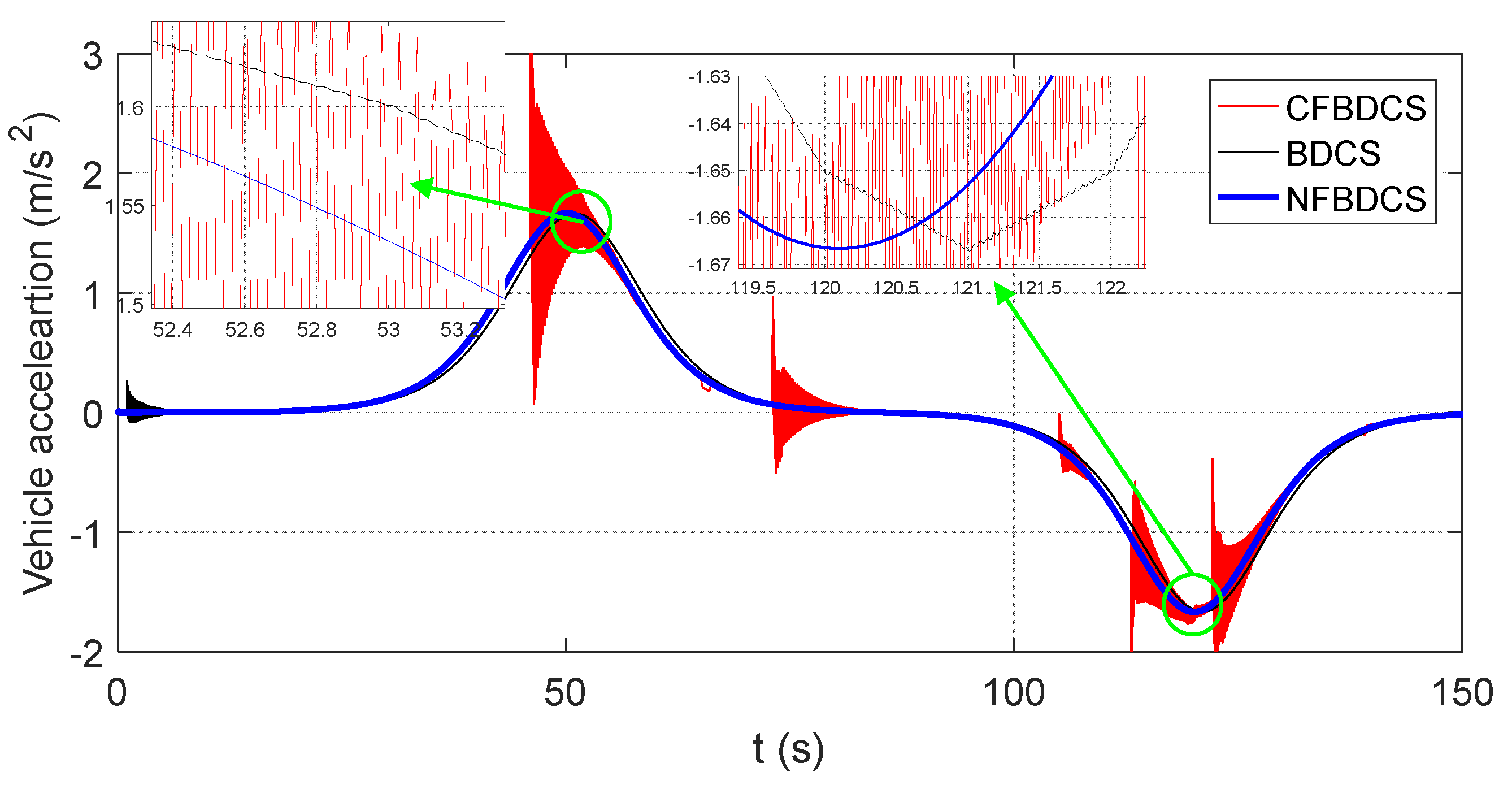
5.1. Dynamic Performance
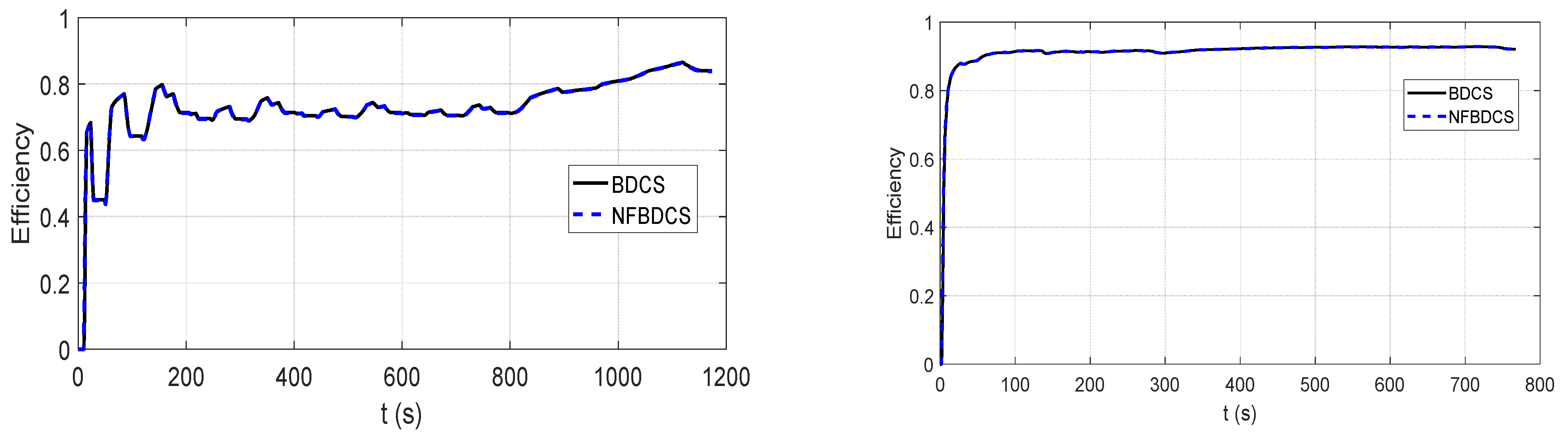
5.2. Energy Efficiency Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Av | frontal area of vehicle | Cd | drag coefficient |
| Ci | damping ratio of the ith shaft | Ct | rolling friction coefficient |
| FV | vehicle resistance | g | gravity acceleration |
| I1, I2 | inertia of EM1 and EM2 | I3a, I3b, I3c | inertia of gear, see Figure 3 |
| I4a, I4b | inertia of final gear pair | I5 | equivalent inertia of vehicle |
| k | penalty factor in EMS | Ki | stiffness of the ith shaft |
| ni | gear ratio | mV | vehicle mass |
| P_loss | power loss of motor | PM | power consumption of motors |
| RW | wheel radius | Tmax | maximum torque of motor |
| T1, T2 | torque of EM1 and EM2 | T3 | torque actuated on the 3rd shaft |
| T5 | load torque of vehicle | T1,0(i), T2,0(i) | discrete backward torque |
| continuous backward torque | tracking torque | ||
| ideal control torque | v | actual vehicle speed | |
| ideal vehicle speed | ω | rotational speed | |
| ωmax | maximum speed of motor | φ | road inclination angle |
| θ | rotational displacement | ρ | air density |
| τ | time delay of motor torque | Δt | sampling period of EMS |
References
- Zhang, H.; Zhang, G.; Wang, J. H∞ Observer Design for LPV Systems with Uncertain Measurements on Scheduling Variables: Application to an Electric Ground Vehicle. IEEE/ASME Trans. Mechatron. 2016, 21, 1659–1670. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, J. Active Steering Actuator Fault Detection for An Automatically-steered Electric Ground Vehicle. IEEE Trans. Veh. Technol. 2017, 66, 3685–3702. [Google Scholar] [CrossRef]
- Sorniotti, A.; Holdstock, T.; Pilone, G.L.; Viotto, F.; Bertolotto, S.; Everitt, M.; Barnes, R.J.; Stubbs, B.; Westby, M. Analysis and simulation of the gearshift methodology for a novel two-speed transmission system for electric powertrains with a central motor. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 915–929. [Google Scholar] [CrossRef] [Green Version]
- Husani, I. Electric and Hybrid Vehicles; CRC Press: Boca Raton, FL, USA, 2003. [Google Scholar]
- Ehsani, M.; Gao, Y.; Emadi, A. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Sorniotti, A.; Holdstock, T.; Everitt, M.; Fracchia, M.; Viotto, F.; Cavallino, C.; Bertolotto, S. A novel clutchless multiple-speed transmission for electric axles. Int. J. Powertrains 2013, 2, 103–131. [Google Scholar] [CrossRef] [Green Version]
- Ren, Q.; Crolla, D.A.; Morris, A. Effect of Transmission Design on Electric Vehicle (EV) Performance. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–11 September 2009; pp. 1260–1265. [Google Scholar]
- Hofman, T.; Steinbuch, M.; van Druten, R.M.; Serrarens, A.F.A. Rule-Based Energy Management Strategies for Hybrid Vehicle Drivetrains: A Fundamental Approach in Reducing Computation Time. IFAC Proc. Vol. 2006, 39, 740–745. [Google Scholar] [CrossRef] [Green Version]
- Yu, C.-H.; Tseng, C.-Y. Research on gear-change control technology for the clutchless automatic–manual transmission of an electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 1446–1458. [Google Scholar] [CrossRef]
- Tseng, C.-Y.; Yu, C.-H. Advanced shifting control of synchronizer mechanisms for clutchless automatic manual transmission in an electric vehicle. Mech. Mach. Theory 2015, 84, 37–56. [Google Scholar] [CrossRef]
- Ruan, J.; Walker, P.; Zhang, N. A comparative study energy consumption and costs of battery electric vehicle transmissions. Appl. Energy 2016, 165, 119–134. [Google Scholar] [CrossRef] [Green Version]
- Shin, J.W.; Kim, J.O.; Choi, J.Y.; Oh, S.H. Design of 2-speed transmission for electric comercial vehicle. Int. J. Automot. Technol. 2014, 15, 145–150. [Google Scholar] [CrossRef]
- Roozegar, M.; Angeles, J. The optimal gear-shifting for a multi-speed transmission system for electric vehicles. Mech. Mach. Theory 2017, 116, 1–13. [Google Scholar] [CrossRef]
- Setiawan, Y.D.; Roozegar, M.; Zou, T.; Angeles, J. A Mathematical Model of Multispeed Transmissions in Electric Vehicles in the Presence of Gear Shifting. IEEE Trans. Veh. Technol. 2018, 67, 397–408. [Google Scholar] [CrossRef]
- Holdstock, T.; Sorniotti, A.; Everitt, M.; Fracchia, M.; Bologna, S.; Bertolotto, S. Energy consumption analysis of a novel four-speed dual motor drivetrain for electric vehicles. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Seoul, Korea, 9–12 October 2012; pp. 295–300. [Google Scholar]
- Hu, M.; Chen, S.; Zeng, J. Control Strategy for the Mode Switch of a Novel Dual-Motor Coupling Powertrain. IEEE Trans. Veh. Technol. 2018, 67, 2001–2013. [Google Scholar] [CrossRef]
- Wu, J.; Liang, J.; Ruan, J.; Zhang, N.; Walker, P.D. Efficiency comparison of electric vehicles powertrains with dual motor and single motor input. Mech. Mach. Theory 2018, 128, 569–585. [Google Scholar] [CrossRef]
- Hu, M.; Zeng, J.; Xu, S.; Fu, C.; Qin, D. Efficiency study of a dual-motor coupling EV powertrain. IEEE Trans. Veh. Technol. 2015, 64, 2252–2260. [Google Scholar] [CrossRef]
- Hu, J.; Zu, G.; Jia, M.; Niu, X. Parameter matching and optimal energy management for a novel dual-motor multi-modes powertrain system. Mech. Syst. Signal Process. 2019, 116, 113–128. [Google Scholar] [CrossRef]
- Hong, X.; Wu, J.; Zhang, N.; Wang, B.; Tian, Y. The dynamic and economic performance study of a new Simpson planetary gearset based dual motor powertrain for electric vehicles. Mech. Mach. Theory 2022, 167, 104579. [Google Scholar] [CrossRef]
- Hong, X.; Wu, J.; Zhang, N.; Wang, B. Energy efficiency optimization of Simpson planetary gearset based dual-motor powertrains for electric vehicles. Energy 2022, 259, 124908. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, J.; Rizzoni, G. A review of architectures and control strategies of dual-motor coupling powertrain systems for battery electric vehicles. Renew. Sustain. Energy Rev. 2022, 162, 112455. [Google Scholar] [CrossRef]
- Yu, X.; Lin, C.; Zhao, M.; Yi, J.; Su, Y.; Liu, H. Optimal energy management strategy of a novel hybrid dual-motor transmission system for electric vehicles. Appl. Energy 2022, 321, 119395. [Google Scholar] [CrossRef]
- Gao, B.; Liang, Q.; Xiang, Y.; Guo, L.; Chen, H. Gear ratio optimization and shift control of 2-speed I-AMT in electric vehicle. Mech. Syst. Signal Process. 2015, 50–51, 615–631. [Google Scholar] [CrossRef]
- Liang, Q.; Gao, B.; Chen, H. Gear Shifting Control for Pure Electric Vehicle with Inverse-AMT. Appl. Mech. Mater. 2012, 190–191, 1286–1289. [Google Scholar] [CrossRef]
- Hu, M.; Chen, L.; Wang, D.; Xu, Z.; Xu, P.; Qin, D.; Zhou, A. Modeling and characteristic study of the shifting engagement process in stepped transmission. Mech. Mach. Theory 2020, 151, 103912. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, N.; Zhou, S.; Walker, P.D. Model and gear shifting control of a novel two-speed transmission for battery electric vehicles. Mech. Mach. Theory 2020, 152, 103902. [Google Scholar] [CrossRef]
- Mo, W.; Wu, J.; Walker, P.D.; Zhang, N. Shift characteristics of a bilateral Harpoon-shift synchronizer for electric vehicles equipped with clutchless AMTs. Mech. Syst. Signal Process. 2021, 148, 107166. [Google Scholar] [CrossRef]
- Roozegar, M.; Angeles, J. A two-phase control algorithm for gear-shifting in a novel multi-speed transmission for electric vehicles. Mech. Syst. Signal Process. 2018, 104, 145–154. [Google Scholar] [CrossRef]
- Mousavi, M.S.R.; Pakniyat, A.; Wang, T.; Boulet, B. Seamless dual brake transmission for electric vehicles: Design, control and experiment. Mech. Mach. Theory 2015, 94, 96–118. [Google Scholar] [CrossRef]
- Fang, S.; Song, J.; Song, H.; Tai, Y.; Li, F.; Sinh Nguyen, T. Design and control of a novel two-speed Uninterrupted Mechanical Transmission for electric vehicles. Mech. Syst. Signal Process. 2016, 75, 473–493. [Google Scholar] [CrossRef]
- Tian, Y.; Ruan, J.; Zhang, N.; Wu, J.; Walker, P. Modelling and control of a novel two-speed transmission for electric vehicles. Mech. Mach. Theory 2018, 127, 13–32. [Google Scholar] [CrossRef]
- Zhu, B.; Zhang, N.; Walker, P.; Zhan, W.; Zhou, X.; Ruan, J. Two-Speed DCT Electric Powertrain Shifting Control and Rig Testing. Adv. Mech. Eng. 2015, 5, 323917. [Google Scholar] [CrossRef]
- Walker, P.; Zhu, B.; Zhang, N. Powertrain dynamics and control of a two speed dual clutch transmission for electric vehicles. Mech. Syst. Signal Process. 2017, 85, 1–15. [Google Scholar] [CrossRef]
- Kim, S.; Oh, J.; Choi, S. Gear shift control of a dual-clutch transmission using optimal control allocation. Mech. Mach. Theory 2017, 113, 109–125. [Google Scholar] [CrossRef]
- Li, G.; Görges, D. Optimal control of the gear shifting process for shift smoothness in dual-clutch transmissions. Mech. Syst. Signal Process. 2018, 103, 23–38. [Google Scholar] [CrossRef]
- Liang, J.; Yang, H.; Wu, J.; Zhang, N.; Walker, P.D. Shifting and power sharing control of a novel dual input clutchless transmission for electric vehicles. Mech. Syst. Signal Process. 2018, 104, 725–743. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, L.; Guo, X.; Yuan, X. Stage-by-phase multivariable combination control for centralized and distributed drive modes switching of electric vehicles. Mech. Mach. Theory 2020, 147, 103752. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, N. Driving mode shift control for planetary gear based dual motor powertrain in electric vehicles. Mech. Mach. Theory 2021, 158, 104217. [Google Scholar] [CrossRef]
- Wu, J.; Hong, X.; Feng, G.; Zhang, Y. Seamless mode shift control for a new Simpson planetary gearset based dual motor powertrain in electric vehicles. Mech. Mach. Theory 2022, 178, 105056. [Google Scholar] [CrossRef]
- Zhao, Z.; Lei, D.; Chen, J.; Li, H. Optimal control of mode transition for four-wheel-drive hybrid electric vehicle with dry dual-clutch transmission. Mech. Syst. Signal Process. 2018, 105, 68–89. [Google Scholar] [CrossRef]
- Wu, J.; Liang, J.; Ruan, J.; Zhang, N.; Walker, P.D. A robust energy management strategy for EVs with dual input power-split transmission. Mech. Syst. Signal Process. 2018, 111, 442–455. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stiffness (Nm/rad) | Inertia (kgm2) | ||||||||||
| K1 | K2 | K3 | K4 | I1 | I2 | I3a | I3b | I3c | I4a | I4b | I5 |
| 50,000 | 50,000 | 20,000 | 40,000 | 0.02 | 0.02 | 0.002 | 0.005 | 0.002 | 0.002 | 0.005 | 124.11 |
| Damping ratio (Nms/rad) | Gear ratio (-) | Vehicle parameters | |||||||||
| C1 | C2 | C3 | C4 | n1 | n2 | n3 | mV (kg) | AV (m2) | Cd (-) | Ct (-) | RW (m) |
| 1 | 1 | 1 | 2 | 1.2 | 2.8 | 3 | 1379 | 2.5826 | 0.25 | 0.015 | 0.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Wang, B.; Hong, X. Driving Torque Control of Dual-Motor Powertrain for Electric Vehicles. Actuators 2022, 11, 320. https://doi.org/10.3390/act11110320
Wu J, Wang B, Hong X. Driving Torque Control of Dual-Motor Powertrain for Electric Vehicles. Actuators. 2022; 11(11):320. https://doi.org/10.3390/act11110320
Chicago/Turabian StyleWu, Jinglai, Bing Wang, and Xianqian Hong. 2022. "Driving Torque Control of Dual-Motor Powertrain for Electric Vehicles" Actuators 11, no. 11: 320. https://doi.org/10.3390/act11110320