
Do Robots Need to Be Stereotyped? Technical Characteristics as a Moderator of Gender Stereotyping

Abstract
:
1. Introduction
Current Study
2. Materials and Methods
2.1. Participants
2.2. Procedure
3. Results
3.1. Analysis
- -
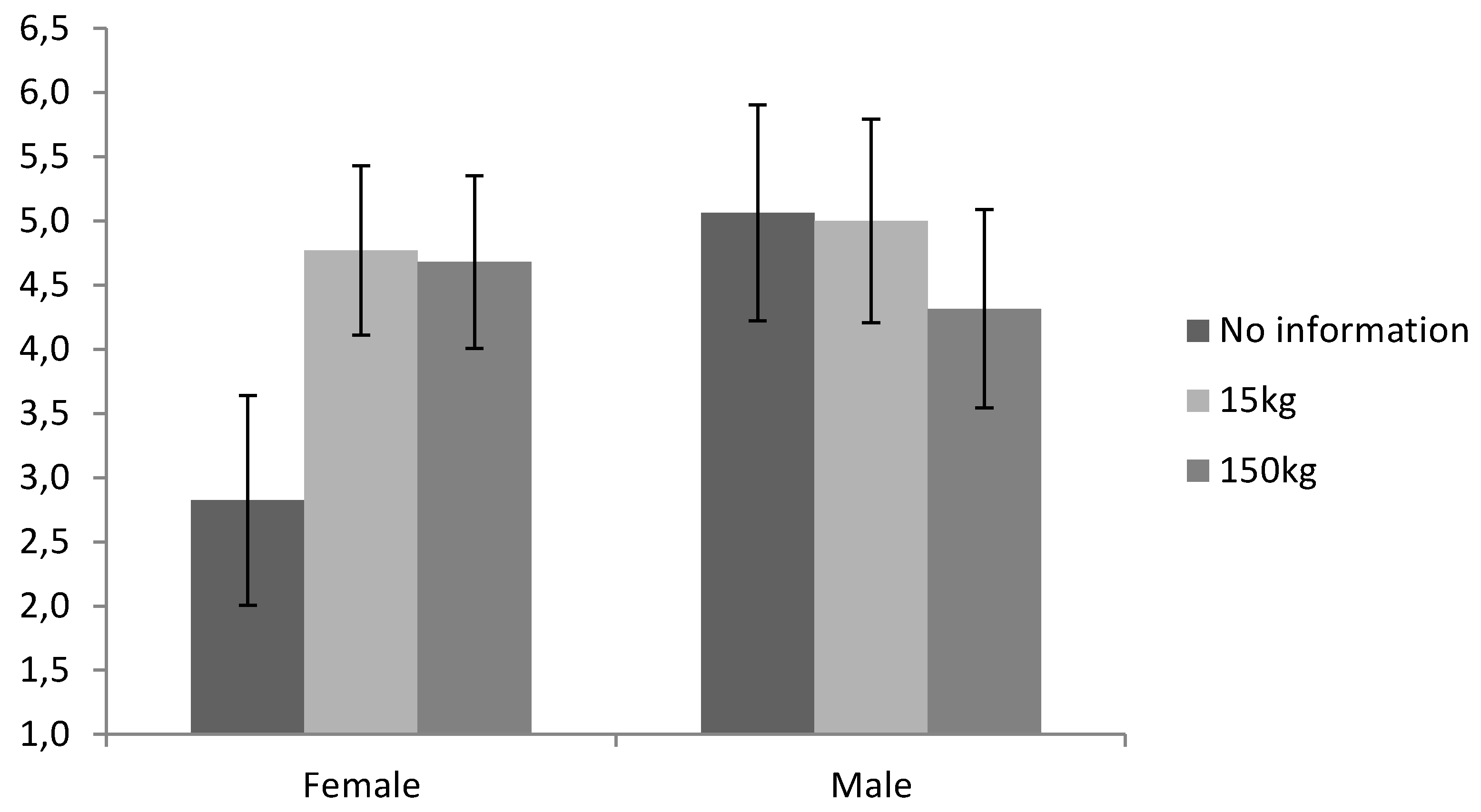
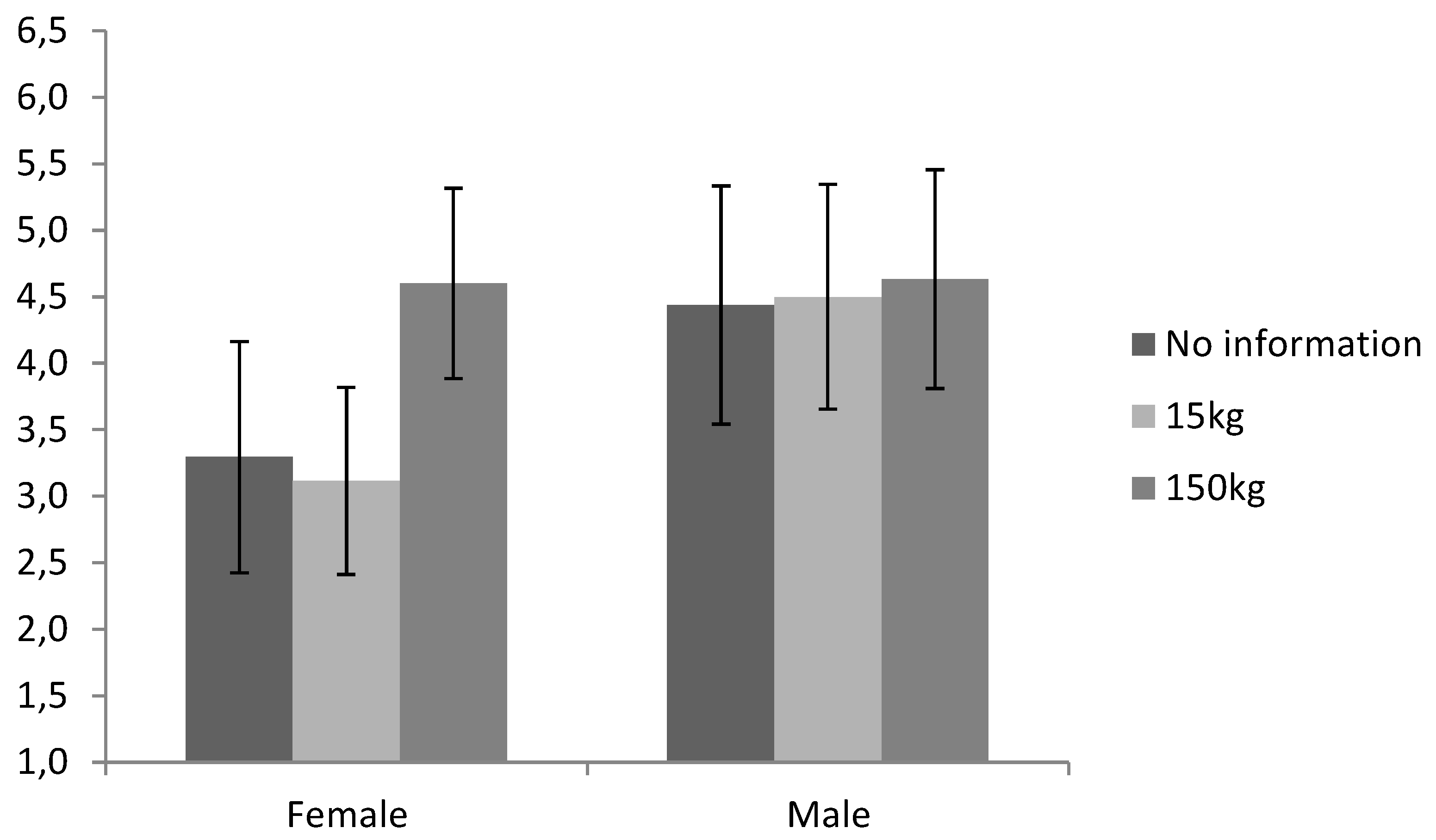
- Effect 1: effect of gender where there is no information on strength (we expect this effect to be significant to replicate stereotype effect for both heavy and light tasks).
- -
- Effect 2: interaction effect between gender and the type of tasks where there is no information on strength (we expect to find no significant interaction effect revealing that Effect 1 is identical for both types of tasks).
- -
- Effect 7: effect of gender where strength was explicitly insufficient to achieve the tasks, i.e., a robot with the ability to lift a maximum of 15 kg had to lift a weight far an excess of this (we expected this effect to be significant).
- -
- Effect 3: effect of gender where strength was explicitly sufficient to achieve both tasks (we expected this effect to be non-significant).
- -
- Effect 4: interaction effect between gender and the type of tasks where strength was explicitly sufficient, i.e., a robot with the ability to lift 150 kg for heavy and light tasks (we expected to find no significant interaction revealing that Effect 3 is identical for both types of tasks).
- -
- Effect 5: effect of gender in the only other condition where strength was explicitly sufficient to achieve the tasks, i.e., a robot with the ability to lift a maximum of 15 kg had to lift a light weight (we expected this effect to be non-significant).
- -
- Effect 6: interaction effect between gender and the type of tasks in the condition of the maximum lift of 15 kg, because strength, in one case, is explicitly sufficient to achieve the tasks (see Effect 5) and, in the other case, explicitly insufficient to achieve the tasks (see Effect 7) (we expected this effect to be significant as an indication of the moderation of the stereotype effect by the technical characteristics when known and sufficient to achieve the tasks).
- (a)
- to test Effects 1 and 3 with and with this coding scheme; because and take the same value, the effect of the type of tasks is no longer of interest (no variation due to the levels of the types of tasks); in other words, the effects of other variables in the model (gender and maximum lift) are tested for both tasks.
- (b)
- to test Effects 2, 4, and 6 with and with this coding scheme; because and are of opposite sign, the scores of W2 are difference scores, so we can take into account the effect of the type of tasks. Using this variable in the model allows one to estimate the effect of the type of tasks and its interactions with other variables.
- (c)
- to test Effect 5 with and with this coding scheme; because takes value of 0, the effect of other variables will only be tested on the light condition, which is similar to analyzing the light condition alone without taking into account the heavy condition (i.e., simple effect).
- (d)
- to test Effect 7 with and with this coding scheme; because takes value of 0, the effect of the other variables will only be tested on the heavy condition; which is similar to analyzing the heavy condition alone without taking into account the light condition (i.e., simple effect).
3.2. Hypotheses Testing
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Isaac Asimov. “Visit to the World’s Fair of 2014.” New York Times. 16 August 1964. Available online: http://www.nytimes.com/books/97/03/23/lifetimes/asi-v-fair.html (accessed on 27 June 2015).
- Byron Reeves, and Clifford Nass. The Media Equation: How People Treat Computers, Television, and New Media Like Real People and Places. California and New York: CSLI Publications and Cambridge University Press, 1996. [Google Scholar]
- Clifford Nass, Jonathan Steuer, and Ellen R. Tauber. “Computers are Social Actors.” In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems: CHI’94B, San Jose, CA, USA, 28 April–3 May 2007; Edited by Beth Adelson, Susan Dumais and Judith Olson. New York: ACM Press, 1994, pp. 72–78. [Google Scholar]
- Friederike Eyssel, and Frank Hegel. “(S)he’s Got the Look: Gender Stereotyping of Robots.” Journal of Applied Social Psychology 42 (2012): 2213–30. [Google Scholar] [CrossRef]
- Benedict Tiong Chee Tay, Taezoon Park, Younbo Jung, Yeow Kee Tan, and Alvin Hong Yee Wong. “When Stereotypes Meet Robots: The Effect of Gender Stereotypes on People’s Acceptance of a Security Robot.” In Engineering Psychology and Cognitive Ergonomics. Understanding Human Cognition, Proceedings of the 10th International Conference on Engineering Psychology and Cognitive Ergonomics, Las Vegas, NV, USA, 21–26 July 2013; Edited by Don Harris. Heidelberg: Springer Berlin, 2013, pp. 261–70. [Google Scholar]
- Daniel J. Rea, Yan Wang, and James E. Young. “Check Your Stereotypes at the Door: An Analysis of Gender Typecasts in Social Human-Robot Interaction.” In Proceedings of the 7th International Conference on Social Robotics (ICSR), Paris, France, 26–30 October 2015; Edited by Adriana Tapus, Elisabeth André, Jean-Claude Martin, François Ferland and Mehdi Ammi. Cham: Springer International Publishing, 2015, pp. 554–63. [Google Scholar]
- Terence Fong, Illah Nourbakhsh, and Kerstin Dautenhahn. “A survey of socially interactive robots.” Robotics and Autonomous Systems 42 (2003): 143–66. [Google Scholar] [CrossRef]
- Alice H. Eagly. Sex Differences in Social Behavior: A Social Role Interpretation. Hillsdale: Lawrence Erlbaum, 1987. [Google Scholar]
- Susan T. Fiske. “Stereotypes work…but only sometimes: Comment on how to motivate the ‘unfinished mind’.” Psychological Inquiry 3 (1992): 161–62. [Google Scholar] [CrossRef]
- Lee Jussim. “Social perception and social reality: A reflection-construction model.” Psychological Review 98 (1991): 54–73. [Google Scholar] [CrossRef]
- Ingo Lütkebohle, Frank Hegel, Simon Schulz, Matthias Hackel, Britta Wrede, Sven Wachsmuth, and Gerhard Sagerer. “The Bielefeld Anthropomorphic Robot Head ‘Flobi’.” In Paper presented at the 2010 IEEE International Conference in Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 3384–91.
- Charles M. Judd, Gary H. McClelland, and Carey S. Ryan. Data Analysis: A Model Comparison Approach. New York: Routledge, 2009. [Google Scholar]
- Thomas Gilovich, Dale Griffin, and Daniel Kahneman. Heuristics and Biases: The Psychology of Intuitive Judgment. New York: Cambridge University Press, 2002. [Google Scholar]
- Daniel Kahneman, and Amos Tversky. “Subjective probability: A judgment of representativeness.” Cognitive Psychology 3 (1972): 430–54. [Google Scholar] [CrossRef]
- Stela H. Seo, Denise Geiskkovitch, Masayuki Nakane, Corey King, and James E. Young. “Poor Thing! Would You Feel Sorry for a Simulated Robot? A Comparison of Empathy toward a Physical and a Simulated Robot.” In Paper presented at the 10th Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2015; pp. 125–32.



{kind=link}
{kind=link}
{kind=link}
| Referring Theoritical Hypothesis | Robot’s Characteristic | Type of Tasks | Robot’s Characteristic Sufficient to Achieve the Task | Expected Result | Corresponding Effects (see Section 3) |
|---|---|---|---|---|---|
| Hypothesis 1 | No information | Heavy tasks | Unknown | Stereotyping (Male > Female) | Effect 1, 2 |
| Hypothesis 1 | No information | Light tasks | Unknown | Stereotyping (Male > Female) | Effect 1, 2 |
| Hypothesis 1 | Maximum lift 15 kg | Heavy tasks | No | Stereotyping (Male > Female) | Effect 6, 7 |
| Hypothesis 2 | Maximum lift 15 kg | Light tasks | Yes | No stereotyping (Male = Female) | Effect 5, 6 |
| Hypothesis 2 | Maximum lift 150 kg | Heavy tasks | Yes | No stereotyping (Male = Female) | Effect 3, 4 |
| Hypothesis 2 | Maximum lift 150 kg | Light tasks | Yes | No stereotyping (Male = Female) | Effect 3, 4 |
| Independent Variables | ||||
|---|---|---|---|---|
| Gender of robot | Lift | Code1 | Code2 | Code3 |
| Female | No information | 0 | 0 | 1 |
| Female | 15 kg | 1 | 0 | 0 |
| Female | 150 kg | 0 | 1 | 0 |
| Male | No information | 0 | 0 | 1 |
| Male | 15 kg | 1 | 0 | 0 |
| Male | 150 kg | 0 | 1 | 0 |
| To test effect 1, 2, 3, 4 | To test effect 1, 2, 5, 6, 7 | To test effect 3, 4, 5, 6, 7 | ||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dufour, F.; Ehrwein Nihan, C. Do Robots Need to Be Stereotyped? Technical Characteristics as a Moderator of Gender Stereotyping. Soc. Sci. 2016, 5, 27. https://doi.org/10.3390/socsci5030027
Dufour F, Ehrwein Nihan C. Do Robots Need to Be Stereotyped? Technical Characteristics as a Moderator of Gender Stereotyping. Social Sciences. 2016; 5(3):27. https://doi.org/10.3390/socsci5030027
Chicago/Turabian StyleDufour, Florian, and Céline Ehrwein Nihan. 2016. "Do Robots Need to Be Stereotyped? Technical Characteristics as a Moderator of Gender Stereotyping" Social Sciences 5, no. 3: 27. https://doi.org/10.3390/socsci5030027