
Design and Performance Assessment of Base Isolated Structures Supplemented with Vibration Control Systems



Abstract
:1. Introduction
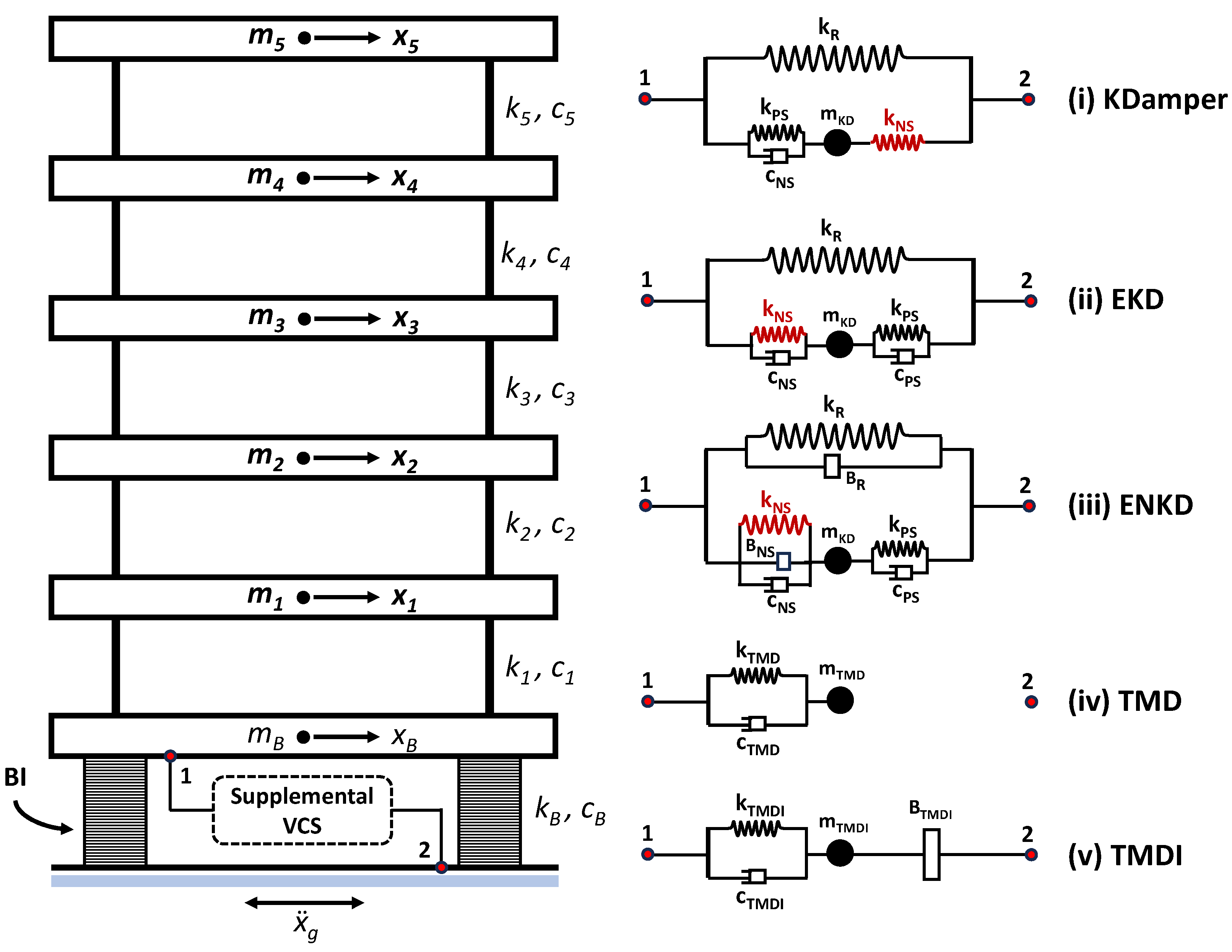
2. Base Isolated Structure Supplemented with VCS
2.1. TMD-Based VCS
2.2. KDamper-Based VCS
3. Optimal Design of VCS
3.1. Reference Structure
3.2. TMD-Based Optimal Design
3.3. KDamper-Based Optimal Design
- i.
- KDamper: (1) NS element value , (2) nominal base frequency , and (3) artificial damper value .
- ii.
- Extended KDamper (EKD): (1) NS element value , (2) nominal base frequency , (3) and (4) artificial dampers values and .
- iii.
- EKD enhanced with inerters (ENKD): (1) NS element value , (2) nominal base frequency , (3), (4) artificial dampers values and , respectively, and (5), (6) inertance ratios and .
4. Multi-Objective Optimization Results
5. Performance Assessment of VCS with Real Earthquakes
5.1. Excitation Input
5.2. Selection of the Optimal KDamper-Based and TMD-Based VCS for Comparison
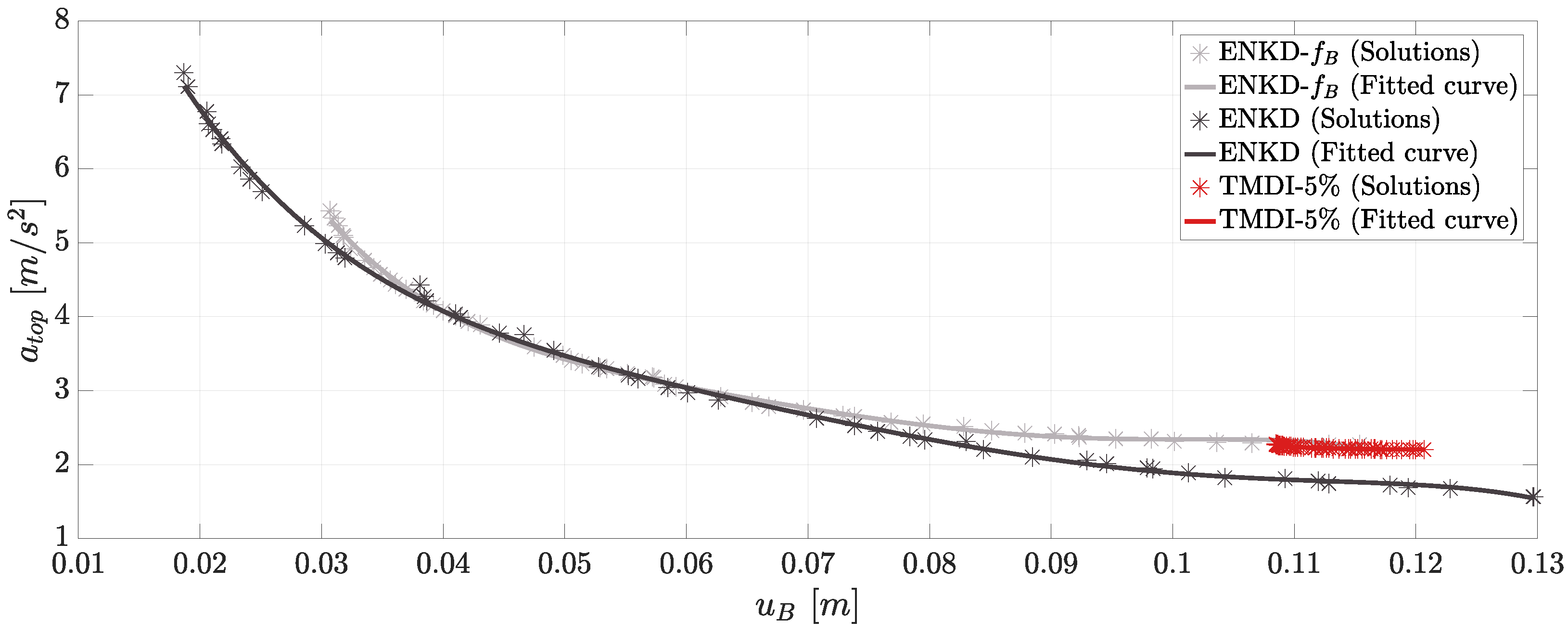
- A stiffer approach of the ENKD that leads to considerably low values for base displacement at the cost of an increase in the acceleration of the top floor. From Figure 5, the optimal set of solutions is chosen, that results to objective function values of = 4.101 cm and = 4.031 m/s2. Hereafter, this system will be referred to as ENKD-S1 (Solution 1).
- A more elastic approach of the ENKD that can retain the top floor acceleration below 2.5 m/s2, similar to the TMDI-5% VCS (Figure 5). However this results in higher values of base displacement. From the same figure, the optimal set of solutions is selected, that leads to objective function values of = 10.130 cm and = 1.884 m/s2. This system is denoted as ENKD-S2 (Solution 2).
5.3. Results of Dynamic Analysis
6. Conclusions
- i.
- The design of the proposed base isolation VCS supplements is realistic, as it accounts for variations in the values of all installed stiffness elements, thus, ensuring the static and dynamic stability of the controlled BI structure.
- ii.
- Among the KDamper-based VCS, the ENKD is the most effective one. For values of base displacement lower than approximately 9 cm (according to optimization results), it has the potential of reducing the acceleration of the top floor more compared to the other systems of the same group.
- iii.
- The generated Pareto fronts of the EKD and ENKD systems for a base displacement range between 4 cm and 6 cm are almost identical to those of the EKD and ENKD systems with a nominal frequency of .
- iv.
- According to the optimization results, the TMDI-5% is the best performing system among the other TMD-based VCS. However, it is limited to base displacements in the range of 10.8–12 cm. In comparison, the KDamper VCS offer a much wider range of solutions and can provide alternative BI designs with “stiffer” base frequencies.
- v.
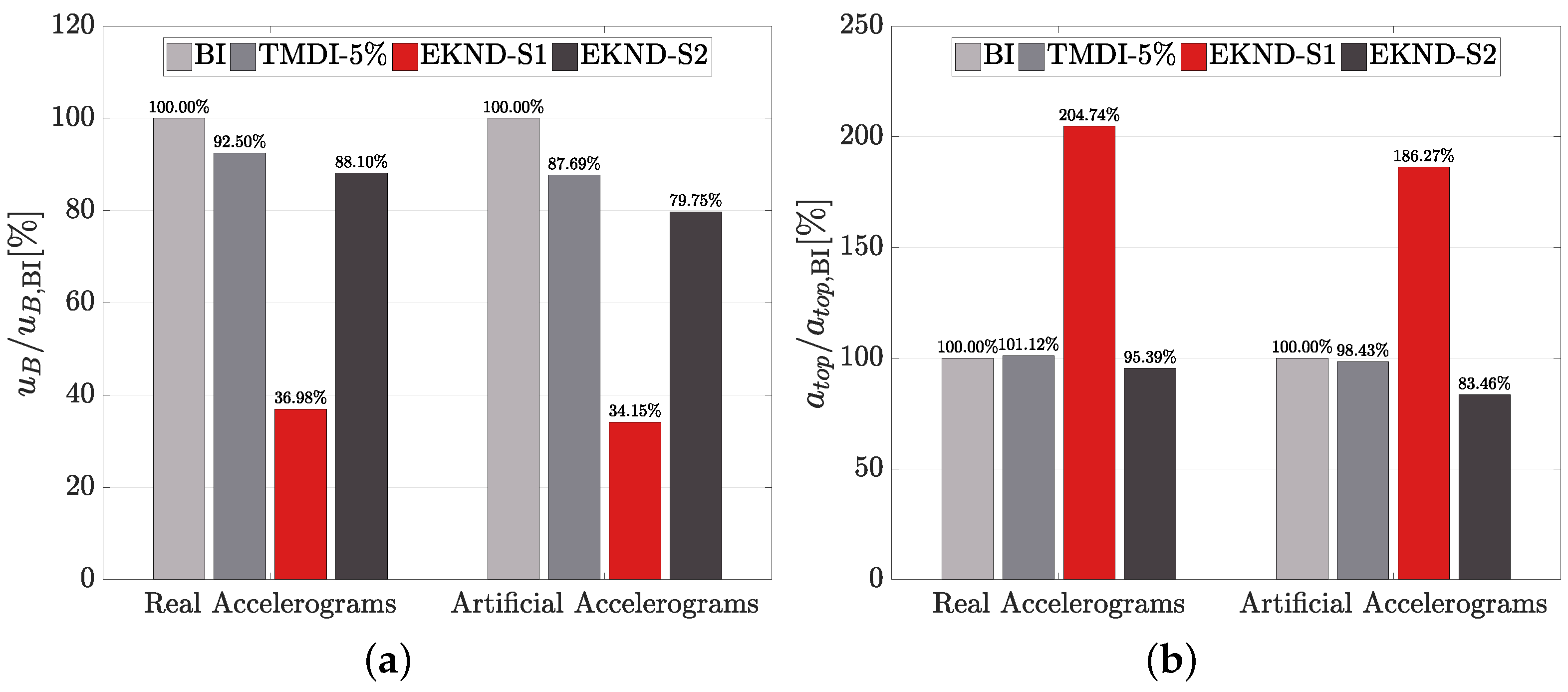
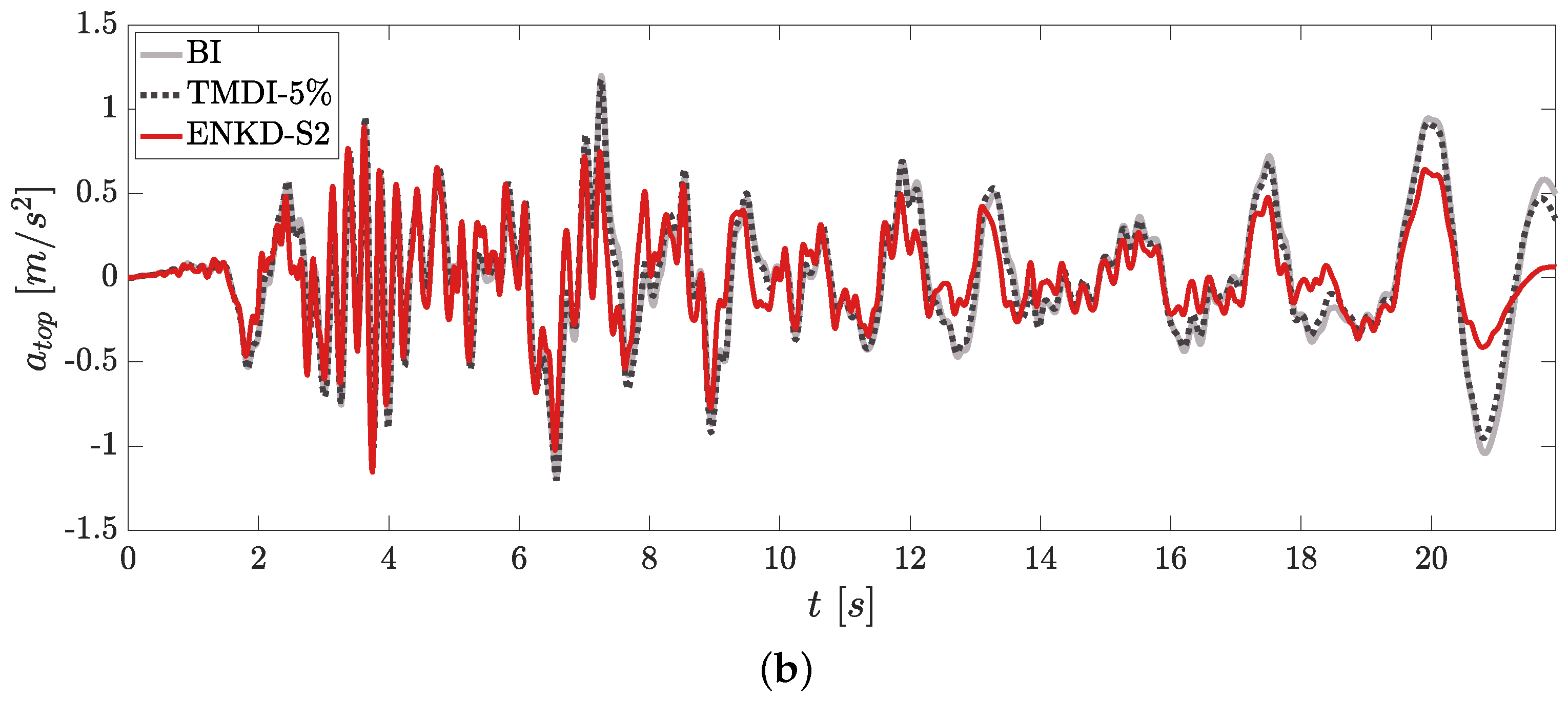
- Based on the numerical case study, the ENKD-S1 system manages to reduce the average absolute maximum base displacement of the building by approximately 64.4% at the cost of increasing the average absolute maximum acceleration of the top floor (95.5% increase). However, the ENKD-S2 system reduces both the base displacement and the top floor acceleration by 16.1% and 10.6%, respectively. The TMDI-5% decreases the displacement of the base by approximately 9.9%, but has a negligible impact on reducing the top floor acceleration (reduction below 0.3%) of the building. Therefore, the ENKD-S2 manages to outperform the TMDI-5%, employing only the 1/50 of the additional mass of the later.
- i.
- The study of the practical implementation challenges, considerations and economic factors associated with integrating the proposed KDamper-based VCS in real-world construction scenarios.
- ii.
- The realistic design of the proposed devices including detailed presentations of their NS mechanisms and the selection/design of their elements based on existing commercial and design catalogs.
- iii.
- The integration of the KDamper-based VCS to highly damped base isolated structures, taking into account their complex hysteretic behavior.
- iv.
- The extension of this work to the case of 3D base isolated structures.
- v.
- The comparison of the KDamper-based VCS (which are categorized as passive seismic base isolation devices) with other semi-active or active VCS.
- vi.
- The implementation of the examined optimization framework and the proposed devices to various types of structures (including bridges and wind-turbines), subjected to different levels of seismic intensity.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| VCS | Vibration Control Systems (or System) |
| BI | Base Isolation or Base Isolated structure |
| NS | Negative Stiffness |
| PS | Positive Stiffness |
| TMD | Tuned Mass Damper |
| TMDI | Tuned Mass Damper Inerter |
| EKD | Extended KDamper |
| SBA | Seismic Base Absorber |
| ENKD | Extended KDamper enhanced with inerters |
| NSGA-II | Non-Sorting Genetic Algorithm Type-II |
| CDO | Crowding Distance Operator |
| OF | Objective Function |
| RC | Reinforced Concrete |
| EC8 | Eurocode 8 |
| PGA | Peak Ground Acceleration |
| PGD | Peak Ground Displacement |
Appendix A
Appendix A.1. TMD-Based VCS
Appendix A.2. KDamper-Based VCS
References
- Castaldo, P. Passive Structural Control. In Integrated Seismic Design of Structure and Control Systems; Springer International Publishing: Cham, Switzerland, 2014; pp. 1–19. [Google Scholar] [CrossRef]
- Soong, T.T.; Costantinou, M.C. Passive and Active Structural Vibration Control in Civil Engineering; Springer: Berlin/Heidelberg, Germany, 2014; Volume 345. [Google Scholar]
- De Iuliis, M.; Castaldo, P. An energy-based approach to the seismic control of one-way asymmetrical structural systems using semi-active devices. Ing. Sismica 2012, 29, 31–50. [Google Scholar]
- Makris, N. Seismic isolation: Early history. Earthq. Eng. Struct. Dyn. 2019, 48, 269–283. [Google Scholar] [CrossRef]
- Chen, M.; Pantoli, E.; Wang, X.; Espino, E.; Mintz, S.; Conte, J.; Hutchinson, T.; Marin, C.; Meacham, B.; Restrepo, J.; et al. Design and Construction of a Full-Scale 5-Story Base Isolated Building Outfitted with Nonstructural Components for Earthquake Testing at the UCSD-NEES Facility. In Structures Congress 2012; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2012; pp. 1349–1360. [Google Scholar] [CrossRef]
- Sanchez, J.; Masroor, A.; Mosqueda, G.; Ryan, K. Static and Dynamic Stability of Elastomeric Bearings for Seismic Protection of Structures. J. Struct. Eng. 2013, 139, 1149–1159. [Google Scholar] [CrossRef]
- Yang, T.Y.; Zhang, H. Seismic Safety Assessment of Base-Isolated Buildings Using Lead-Rubber Bearings. Earthq. Spectra 2019, 35, 1087–1108. [Google Scholar] [CrossRef]
- De Domenico, D.; Losanno, D.; Vaiana, N. Experimental tests and numerical modeling of full-scale unbonded fiber reinforced elastomeric isolators (UFREIs) under bidirectional excitation. Eng. Struct. 2023, 274, 115118. [Google Scholar] [CrossRef]
- Kalpakidis, I. Lead-Rubber Bearings with Emphasis on Their Implementation to Structural Design. In Encyclopedia of Earthquake Engineering; Springer: Berlin/Heidelberg, Germany, 2014; pp. 1–11. [Google Scholar] [CrossRef]
- Ravari, A.K.; Othman, I.B.; Ibrahim, Z.B.; Ab-Malek, K. P-Δ and End Rotation Effects on the Influence of Mechanical Properties of Elastomeric Isolation Bearings. J. Struct. Eng. 2012, 138, 669–675. [Google Scholar] [CrossRef]
- Javidan, M.M.; Naeem, A.; Kim, J. Seismic retrofit of structures using added steel column friction dampers. Steel Compos. Struct. 2023, 49, 257–270. [Google Scholar] [CrossRef]
- Dereje, A.J.; Javidan, M.M.; Ahn, T.S.; Kim, J. Experimental and analytical study of a seismic energy dissipation device made of butterfly-shaped steel plates and viscoelastic pads. J. Build. Eng. 2024, 82, 108251. [Google Scholar] [CrossRef]
- Javidana, M.M.; Kim, J. Steel hexagonal damper-brace system for efficient seismic protection of structures. Steel Compos. Struct. 2022, 45, 683–695. [Google Scholar] [CrossRef]
- Javidan, M.M.; Kim, J. A ductile steel damper-brace for low-damage framed structures. Steel Compos. Struct. 2022, 44, 325–337. [Google Scholar] [CrossRef]
- Tsai, H.C. The effect of tuned-mass dampers on the seismic response of base-isolated structures. Int. J. Solids Struct. 1995, 32, 1195–1210. [Google Scholar] [CrossRef]
- Taniguchi, T.; Der Kiureghian, A.; Melkumyan, M. Effect of tuned mass damper on displacement demand of base-isolated structures. Eng. Struct. 2008, 30, 3478–3488. [Google Scholar] [CrossRef]
- Palazzo, B.; Petti, L. Combined control strategy: Base isolation and tuned mass damping. ISET J. Earthq. Technol. 1999, 36, 121–137. [Google Scholar]
- Stanikzai, M.H.; Elias, S.; Matsagar, V.A.; Jain, A.K. Seismic response control of base-isolated buildings using tuned mass damper. Aust. J. Struct. Eng. 2020, 21, 310–321. [Google Scholar] [CrossRef]
- Xiang, P.; Nishitani, A. Optimum design for more effective tuned mass damper system and its application to base-isolated buildings. Struct. Control Health Monit. 2014, 21, 98–114. [Google Scholar] [CrossRef]
- Weber, B.; Feltrin, G. Assessment of long-term behavior of tuned mass dampers by system identification. Eng. Struct. 2010, 32, 3670–3682. [Google Scholar] [CrossRef]
- Kang, Y.-j.; Peng, L.-y. Optimisation Design and Damping Effect Analysis of Large Mass Ratio Tuned Mass Dampers. Shock Vib. 2019, 2019, 8376781. [Google Scholar] [CrossRef]
- Smith, M.C. Synthesis of Mechanical Networks: The Inerter. IEEE Trans. Autom. Control 2002, 47, 1648–1662. [Google Scholar] [CrossRef]
- Lazar, I.F.; Neild, S.A.; Wagg, D.J. Using an inerter-based device for structural vibration suppression. Earthq. Eng. Struct. Dyn. 2014, 43, 1129–1147. [Google Scholar] [CrossRef]
- Pietrosanti, D.; De Angelis, M.; Basili, M. Optimal design and performance evaluation of systems with Tuned Mass Damper Inerter (TMDI). Earthq. Eng. Struct. Dyn. 2017, 46, 1367–1388. [Google Scholar] [CrossRef]
- Giaralis, A.; Taflanidis, A.A. Optimal tuned mass-damper-inerter (TMDI) design for seismically excited MDOF structures with model uncertainties based on reliability criteria. Struct. Control Health Monit. 2018, 25, e2082. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. An enhanced base isolation system equipped with optimal tuned mass damper inerter (TMDI). Earthq. Eng. Struct. Dyn. 2018, 47, 1169–1192. [Google Scholar] [CrossRef]
- De Domenico, D.; Impollonia, N.; Ricciardi, G. Soil-dependent optimum design of a new passive vibration control system combining seismic base isolation with tuned inerter damper. Soil Dyn. Earthq. Eng. 2018, 105, 37–53. [Google Scholar] [CrossRef]
- De Angelis, M.; Giaralis, A.; Petrini, F.; Pietrosanti, D. Optimal tuning and assessment of inertial dampers with grounded inerter for vibration control of seismically excited base-isolated systems. Eng. Struct. 2019, 196, 109250. [Google Scholar] [CrossRef]
- Ahmet Hilmi Deringöl, E.M.G. Effect of Using High Damping Rubber Bearings for Seismic Isolation of the Buildings. Int. J. Steel Struct. 2021, 21, 1698–1722. [Google Scholar] [CrossRef]
- Dai, K.; Yang, Y.; Li, T.; Ge, Q.; Wang, J.; Wang, B.; Chen, P.; Huang, Z. Seismic analysis of a base-isolated reinforced concrete frame using high damping rubber bearings considering hardening characteristics and bidirectional coupling effect. Structures 2022, 46, 698–712. [Google Scholar] [CrossRef]
- Platus, D.L. Negative-Stiffness-Mechanism Vibration Isolation Systems. In Proceedings of the SPIE Technical: OPTCON ’91, San Jose, CA, USA, 1–30 November 1992; Volume 1619, pp. 44–54. [Google Scholar]
- Antoniadis, I.; Chronopoulos, D.; Spitas, V.; Koulocheris, D. Hyper-damping properties of a stiff and stable linear oscillator with a negative stiffness element. J. Sound Vib. 2015, 346, 37–52. [Google Scholar] [CrossRef]
- Iemura, H.; Pradono, M.H. Advances in the development of pseudo-negative-stiffness dampers for seismic response control. Struct. Control Health Monit. 2009, 16, 784–799. [Google Scholar] [CrossRef]
- Sarlis, A.A.; Pasala, D.T.R.; Constantinou, M.C.; Reinhorn, A.M.; Nagarajaiah, S.; Taylor, D.P. Negative Stiffness Device for Seismic Protection of Structures. J. Struct. Eng. 2012, 139, 1124–1133. [Google Scholar] [CrossRef]
- Pasala, D.T.R.; Sarlis, A.A.; Nagarajaiah, S.; Reinhorn, A.M.; Constantinou, M.C.; Taylor, D. Adaptive Negative Stiffness: New Structural Modification Approach for Seismic Protection. J. Struct. Eng. 2013, 139, 1112–1123. [Google Scholar] [CrossRef]
- Attary, N.; Symans, M.; Nagarajaiah, S. Development of a rotation-based negative stiffness device for seismic protection of structures. J. Vib. Control 2017, 23, 853–867. [Google Scholar] [CrossRef]
- Saha, A.; Mishra, S.K. Adaptive Negative Stiffness Device based nonconventional Tuned Mass Damper for seismic vibration control of tall buildings. Soil Dyn. Earthq. Eng. 2019, 126, 105767. [Google Scholar] [CrossRef]
- Sarlis, A.A.; Pasala, D.T.R.; Constantinou, M.C.; Reinhorn, A.M.; Nagarajaiah, S.; Taylor, D.P. Negative Stiffness Device for Seismic Protection of Structures: Shake Table Testing of a Seismically Isolated Structure. J. Struct. Eng. 2016, 142, 04016005. [Google Scholar] [CrossRef]
- Wang, M.; Sun, F.-f.; Jin, H.-j. Performance evaluation of existing isolated buildings with supplemental passive pseudo-negative stiffness devices. Eng. Struct. 2018, 177, 30–46. [Google Scholar] [CrossRef]
- Li, H.N.; Sun, T.; Lai, Z.; Nagarajaiah, S. Effectiveness of Negative Stiffness System in the Benchmark Structural-Control Problem for Seismically Excited Highway Bridges. J. Bridge Eng. 2018, 23, 04018001. [Google Scholar] [CrossRef]
- Cimellaro, G.P.; Domaneschi, M.; Warn, G. Three-Dimensional Base Isolation Using Vertical Negative Stiffness Devices. J. Earthq. Eng. 2018, 24, 2004–2032. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, Y.; Hu, X.; Weng, D. Seismic performance upgrading of containment structures using a negative-stiffness amplification system. Eng. Struct. 2022, 262, 114394. [Google Scholar] [CrossRef]
- Antoniadis, I.A.; Kanarachos, S.A.; Gryllias, K.; Sapountzakis, I.E. KDamping: A stiffness based vibration absorption concept. JVC/J. Vib. Control 2018, 24, 588–606. [Google Scholar] [CrossRef]
- Kapasakalis, K.; Antoniadis, I.; Sapountzakis, E. Performance assessment of the KDamper as a seismic Absorption Base. Struct. Control Health Monit. 2020, 27, e2482. [Google Scholar] [CrossRef]
- Sapountzakis, E.J.; Syrimi, P.G.; Pantazis, I.A.; Antoniadis, I.A. KDamper concept in seismic isolation of bridges with flexible piers. Eng. Struct. 2017, 153, 525–539. [Google Scholar] [CrossRef]
- Kapasakalis, K.; Antoniadis, I.; Sapountzakis, E. Constrained optimal design of seismic base absorbers based on an extended KDamper concept. Eng. Struct. 2021, 226, 111312. [Google Scholar] [CrossRef]
- Mantakas, A.G.; Kapasakalis, K.A.; Alvertos, A.E.; Antoniadis, I.A.; Sapountzakis, E.J. A negative stiffness dynamic base absorber for seismic retrofitting of residential buildings. Struct. Control Health Monit. 2022, 29, e3127. [Google Scholar] [CrossRef]
- Kapasakalis, K.; Mantakas, A.; Kalderon, M.; Antoniou, M.; Sapountzakis, E. Performance Evaluation of Distributed Extended KDamper Devices for Seismic Protection of Mid-Rise Building Structures. J. Earthq. Eng. 2023, 28, 972–997. [Google Scholar] [CrossRef]
- Florakis, G.; Kapasakalis, K.; Antoniadis, I.; Sapountzakis, E. Dimensioning and realistic design of a novel based negative stiffness seismic isolator. In Proceedings of the XII International Conference in Structural Dynamics (EURODYN), Southampton, UK, 1–3 July 2023. [Google Scholar]
- Kapasakalis, K.A.; Antoniadis, I.A.; Sapountzakis, E.J. STIFF vertical seismic absorbers. J. Vib. Control 2022, 28, 1937–1949. [Google Scholar] [CrossRef]
- Kalogerakou, M.E.; Kapasakalis, K.A.; Antoniadis, I.A.; Sapountzakis, E.J. Vertical seismic protection of structures with inerter-based negative stiffness absorbers. Bull. Earthq. Eng. 2022, 21, 1439–1480. [Google Scholar] [CrossRef]
- Gkikakis, A.E.; Kapasakalis, K.A.; Sapountzakis, E.J. Comprehensive design optimization of vertical seismic absorbers incorporating sensitivity and robust analysis: A case study of the KDamper. Eng. Struct. 2024, 301, 117303. [Google Scholar] [CrossRef]
- Kampitsis, A.; Kapasakalis, K.; Via-Estrem, L. An integrated FEA-CFD simulation of offshore wind turbines with vibration control systems. Eng. Struct. 2022, 254, 113859. [Google Scholar] [CrossRef]
- Kapasakalis, K.A.; Antoniadis, I.A.; Sapountzakis, E.J.; Kampitsis, A.E. Vibration Mitigation of Wind Turbine Towers Using Negative Stiffness Absorbers. J. Civ. Eng. Constr. 2021, 10, 123–139. [Google Scholar] [CrossRef]
- Kapasakalis, K.; Antoniadis, I.; Sapountzakis, E. Feasibility Assessment of Stiff Seismic Base Absorbers. J. Vib. Eng. Technol. 2021, 10, 37–53. [Google Scholar] [CrossRef]
- Kapasakalis, K.; Florakis, G.; Antoniadis, I.; Sapountzakis, E. Seismic Protection of Multi-Story Structures with Novel Vibration Absorption Devices Combining Negative Stiffness and Inerter. In Proceedings of the 8th International Conference on Computational Methods in Structural Dynamics and Earthquake Engineering, Athens, Greece, 28–30 June 2021; pp. 4026–4045. [Google Scholar] [CrossRef]
- Florakis, G.I.; Antoniadis, I.A.; Sapountzakis, E.J. A novel gas spring based negative stiffness mechanism for seismic protection of structures. Eng. Struct. 2023, 291, 116389. [Google Scholar] [CrossRef]
- Florakis, G.; Kapasakalis, K.; Sapountzakis, E.; Antoniadis, I. Multi-Objective Optimization of a Seismic Base Absorber Incorporating Negative Stiffness. In Proceedings of the 29th International Congress on Sound and Vibration, Prague, Czech Republic, 9–13 July 2023. [Google Scholar]
- Vaiana, N.; Rosati, L. Analytical and differential reformulations of the Vaiana–Rosati model for complex rate-independent mechanical hysteresis phenomena. Mech. Syst. Signal Process. 2023, 199, 110448. [Google Scholar] [CrossRef]
- Vaiana, N.; Rosati, L. Classification and unified phenomenological modeling of complex uniaxial rate-independent hysteretic responses. Mech. Syst. Signal Process. 2023, 182, 109539. [Google Scholar] [CrossRef]
- Li, H.; Yu, Y.; Li, J.; Li, Y.; Askari, M. Multi-objective optimisation for improving the seismic protection performance of a multi-storey adaptive negative stiffness system based on modified NSGA-II with DCD. J. Build. Eng. 2021, 43, 103145. [Google Scholar] [CrossRef]
- Heris, M.K. NSGA-II in MATLAB. Yarpiz. 2015. Available online: https://yarpiz.com/56/ypea120-nsga2 (accessed on 10 April 2023).
- Etedali, S.; Rakhshani, H. Optimum design of tuned mass dampers using multi-objective cuckoo search for buildings under seismic excitations. Alex. Eng. J. 2018, 57, 3205–3218. [Google Scholar] [CrossRef]
- Seismosoft. SeismoArtif—A Computer Program for Generating Artificial Earthquake Accelerograms Matched to a Specific Target Response Spectrum; Seismosoft: Pavia, Italy, 2018. [Google Scholar]
- Den Hartog, J.P. Mechanical Vibrations, 4th ed.; McGraw-Hill Book Co., Inc.: New York, NY, USA; London, UK, 1956. [Google Scholar] [CrossRef]
- Pacific Earthquake Engineering Research Center-Ground Motion Database. Available online: https://ngawest2.berkeley.edu/ (accessed on 20 January 2023).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Earthquake | Year | Recording | Mw | PGA | PGD | RJB | Dur5–95% |
|---|---|---|---|---|---|---|---|---|
| Name | Station | [g] | [cm] | [km] | [s] | |||
| 1 | Friuli | 1976 | Tolmezzo | 6.5 | 0.3571 | 4.588 | 14.97 | 4.9 |
| 2 | Kocaeli | 1999 | Izmit | 7.51 | 0.1651 | 11.836 | 3.62 | 15.1 |
| 3 | Chi-Chi | 1999 | CHY006 | 7.62 | 0.3587 | 16.994 | 9.76 | 26.7 |
| 4 | Landers | 1992 | Joshua tree | 7.28 | 0.2736 | 7.704 | 11.03 | 27.1 |
| 5 | Northridge | 1994 | N. Hollywood | 6.69 | 0.3087 | 9.023 | 7.89 | 16.0 |
| 6 | Kobe | 1995 | Amagasaki | 6.9 | 0.2758 | 26.593 | 11.34 | 19.4 |
| 7 | Duzce | 1999 | Lamont 1059 | 7.14 | 0.1524 | 10.190 | 4.17 | 15.0 |
| 8 | Niigata | 2004 | NIG017 | 6.63 | 0.4765 | 12.758 | 4.22 | 36.7 |
| 9 | Kozani | 1995 | Kozani | 6.4 | 0.2069 | 1.747 | 14.13 | 8.6 |
| 10 | L’Aquila | 2009 | V. Aterno | 6.3 | 0.4018 | 5.268 | 0.0 | 7.6 |
| VCS | Design Variables | |||||
|---|---|---|---|---|---|---|
| [Hz] | [kN/m] | [kNs/m] | [kNs/m] | [%] | [%] | |
| ENKD-S1 | 0.613 | −82,383.62 | 5591.83 | 8417.23 | 15.35 | 7.40 |
| ENKD-S2 | 0.321 | −43,989.97 | 515.05 | 10,071.56 | 2.31 | 1.14 |
| VCS | Resulting Stiffness | Objective Functions | ||
|---|---|---|---|---|
| [kN/m] | [kN/m] | [cm] | [m/s2] | |
| ENKD-S1 | 155,652.54 | 180,509.82 | 4.101 | 4.031 |
| ENKD-S2 | 44,416.86 | 147,592.81 | 10.130 | 1.884 |
| Design Variables | Resulting Parameters | Objective Functions | |||||
|---|---|---|---|---|---|---|---|
| [Hz] | [%] | [%] | [Hz] | [kN/m] | [kNs/m] | [cm] | [m/s2] |
| 1.141 | 49.04 | 14.29 | 0.652 | 1736.80 | 415.83 | 10.848 | 2.278 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sapountzakis, E.; Florakis, G.; Kapasakalis, K. Design and Performance Assessment of Base Isolated Structures Supplemented with Vibration Control Systems. Buildings 2024, 14, 955. https://doi.org/10.3390/buildings14040955
Sapountzakis E, Florakis G, Kapasakalis K. Design and Performance Assessment of Base Isolated Structures Supplemented with Vibration Control Systems. Buildings. 2024; 14(4):955. https://doi.org/10.3390/buildings14040955
Chicago/Turabian StyleSapountzakis, Evangelos, Georgios Florakis, and Konstantinos Kapasakalis. 2024. "Design and Performance Assessment of Base Isolated Structures Supplemented with Vibration Control Systems" Buildings 14, no. 4: 955. https://doi.org/10.3390/buildings14040955