3.1. The EPSD Model
In this paper, we only take non-stationary intensity measurements of the high- and low-frequency component processes in the
u direction
into consideration for simplicity, and the corresponding evolutionary power spectrum density (EPSD) functions
can be uniformly defined as follows [
22]:
where
respectively indicate high- and low-frequency component processes, and
respectively indicate
x-,
y-, and
z-direction components.
and
are the non-stationary intensity-modulating function and the two-sided power spectrum density (PSD) of
, respectively.
For the intensity-modulating function, the model suggested by Amin-Ang [
23], which can reflect the non-stationary characteristics of ground motion, is employed in this paper and is given by the following:
where
and
indicate the arrival time and the end time of the stationary stage of the ground motion;
indicates the decay coefficient of the decay stage of the ground motion. In this context, the parameter vector of
can defined as
. This model is acceptable for both high- and low-frequency components.
For the PSD of the corresponding stationary high-frequency component process, the Clough–Penzien model is employed in this paper [
24]:
To ensure the rationality of the seismic spectrum energy in this PSD function, parameters
and
are the filter parameters of the widely used Kanai–Tajimi spectrum, namely, the dominant frequency and the critical damping of the soil layer, respectively.
and
are the parameters of a second filter to ensure a finite power for ground displacement.
is the spectral intensity factor, which indicates the intensity of the white noise bedrock acceleration process and can be expressed as follows [
25]:
where
indicates the peak ground acceleration (PGA);
indicates the peak factor. In this context, the parameter vector of
can be written as
.
As mentioned in Equations (2)–(5), the EPSD parameter vectors of high- and low-frequency component processes can defined as follows:
It can be seen that the EPSD parameters can be divided into three parts: the PSD parameters control the spectrum characteristic; the intensity parameters control the amplitude characteristic; and the intensity-modulating function parameters control the duration characteristic.
3.2. The Identification of EPSD Parameter Vectors
The EPSD parameters of high- and low-frequency component processes in different directions are associated with the soil conditions, which may be discerned and ascertained by analyzing the recorded data of multi-directional long-period ground motion at a specific site. To this end, the high- and low-frequency components of the u-th direction of any measured multi-directional long-period ground motion record can be defined as and ; indicates the frequency components and directions of . What needs to be further explained is the fact that the measured record is regarded as a stochastic process with one sample, and the corresponding estimated ESPD function of is .
In a broad sense, the total energy of
can be characterized using Arias’ intensity [
26]. Additionally, Arias’ time-varying intensity provides insight into the temporal energy distribution in and non-stationarity of intensity, regardless of the specific soil conditions. The time-varying normalized energy distribution function (NEDF) of
can be mathematically represented as follows:
in which
indicates the recorded duration of
.
Moreover, the NEDF of
can be represented by means of the EPSD function, as utilized in this study, in accordance with Parseval’s theorem. This theorem states that the total energy of a signal in the time domain is equivalent to its total energy in the frequency domain. In this end, the NEDF of the stochastic process for which the corresponding EPSD function is
can be defined as follows:
It is evident that the NEDF solely pertains to the parameter vector of the intensity-modulating function. In this context, by taking
as the target, the parameter vector
of
can be identified utilizing the best-square approximation principle:
Furthermore, considering the substantial variation in recording duration and step length among different measured records, the average values of the identified parameters of the intensity modulation function are computed in this research to effectively capture the statistical properties of non-stationary multi-directional long-period ground motions under various soil conditions.
Moreover, concerning the energy characteristics of the ground motion, the total energy of
in the time domain is equal to that in the frequency domain according to Parseval’s theorem [
27]:
Actually,
is the response variance of
. In this context, the peak factor can be obtained using Equation (11) since the PGA of
can be easily extracted, as follows:
What needs further explaining is the fact that this research uses the average peak factor determined across various soil conditions as the recommended value, as the influence of the peak factor on ground motion amplitude is observed to be linear.
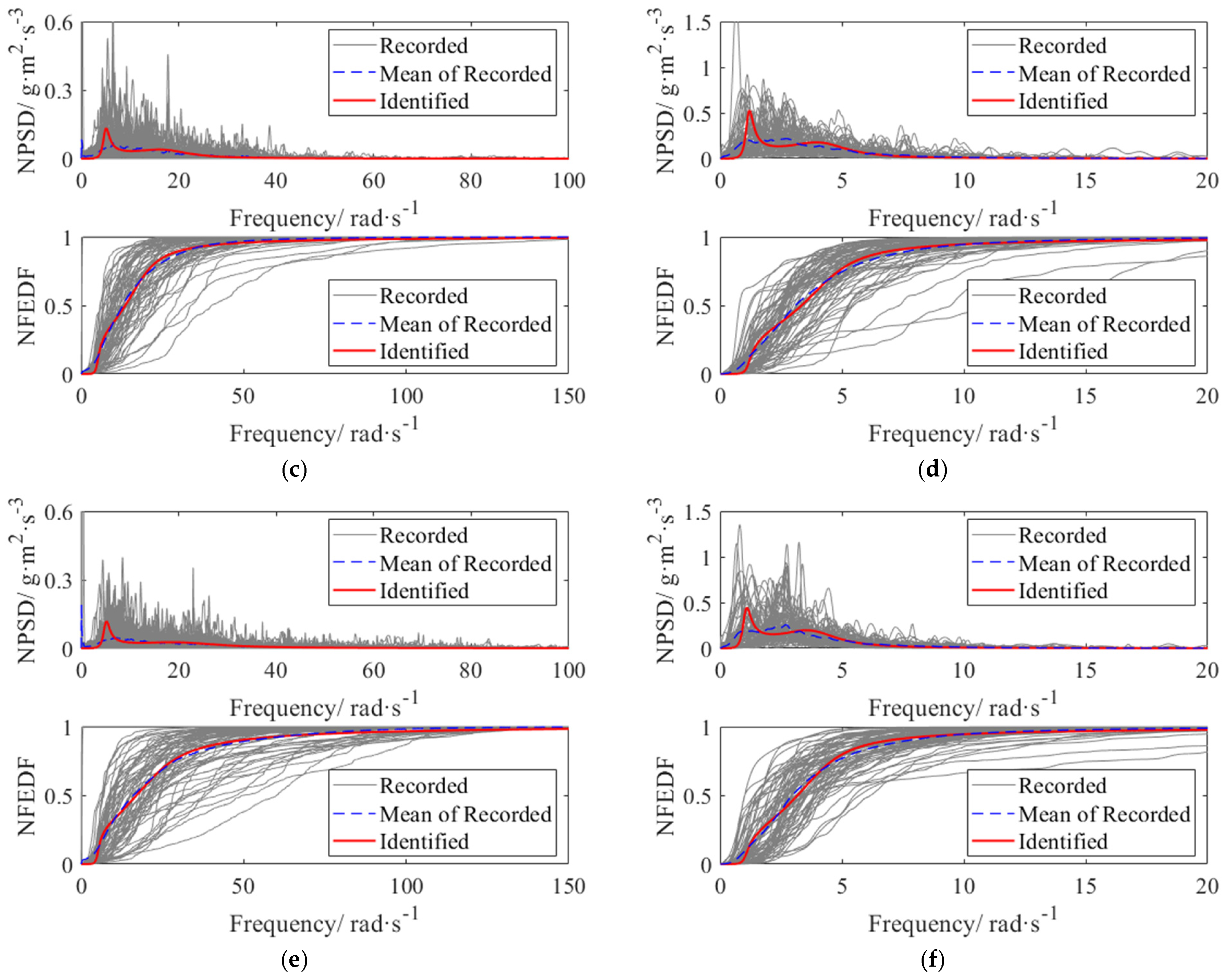
The remaining parameters that influence the shape of the spectrum can only be identified using the PSD function, as the identification of the parameters influencing duration and amplitude has been completed. Generally speaking, the PSD of
can be roughly estimated utilizing MATLAB’s toolbox function ‘pwelch’. Additionally, this work utilizes the normalized frequency domain energy distribution function (NFEDF) to mitigate the influence of the peak ground acceleration (PGA) and the peak factor on the spectral features. The NFEDF, denoted as
, is defined in the following manner:
where
indicates the estimated PSD of
. Furthermore, in order to accurately represent the energy distribution across the frequency domain for both high- and low-frequency components under varying soil conditions, this research uses the average of the estimated NFEDF,
, of the corresponding measured records.
Correspondingly, the NFEDF can be modeled using the PSD model proposed in this paper, as follows:
Taking
as the target, the parameter vector of the PSD functions can be identified utilizing the best-square approximation principle:
In this manner, the orderly identification of the EPSD parameter vector is completed, namely, from the duration to the energy and then to the spectrum.
In summary, the process of identification can be condensed into the following steps:
- (a)
Employing NEDF to ascertain the parameters of the intensity modulation function for each recorded measurement under varying soil conditions and, subsequently, averaging these parameters to obtain the recommended values for the high- and low-frequency component processes.
- (b)
The utilization of response variance for the purpose of identifying the peak factor is suggested subsequent to the acquisition of parameters governing the duration characteristics. The average value of the detected peak factor is then considered as the recommended parameters for high- and low-frequency component processes.
- (c)
This study employs the averaged NFEDF across various soil conditions to determine the optimal parameters for the high- and low-frequency component processes of each direction that influence the spectral features.
Further elucidation is warranted on the execution of the identification work, which is conducted in accordance with the prevailing soil conditions.
Figure 3 and
Figure 4 illustrate the identified results of the EPSD parameters for site 2 pertaining to both high- and low-frequency components in each direction. The results clearly indicate that the identified value can be considered as the “mean” in terms of the optimal square approximation of the recorded value. These findings provide strong evidence for the efficacy of the parameter identification approach proposed in this study.
Table 3 presents the EPSD parameters that are recommended for multi-directional long-period ground motions. On the other hand,
Table 4 and
Table 5 display the amplitude parameter ratios associated with various frequency components, direction components, and soil conditions. These tables provide valuable insights regarding direction, frequency components, and site characteristics.
- (1)
The engineering features of the x- and y-direction components of multi-dimensional ground motion are similar. However, the z-direction component exhibits a longer duration, a greater dominant frequency, and a lower energy in comparison to the horizontal components.
- (2)
In contrast to the high-frequency components, the low-frequency components exhibit higher energy levels and are mostly focused within the low-frequency range. Moreover, it is worth noting that the length of the low-frequency components is comparatively longer when compared to that of the high-frequency components.
- (3)
As the soil conditions undergo softening, the duration of the ground motion progressively elongates; the dominant frequency gradually diminishes, and the critical damping increases roughly. Moreover, it is evident that, as the soil conditions transition to a softer state, there is a gradual drop in the average ratio of PGA. Specifically, soft soil exhibits a greater ability to magnify the PGA of low-frequency components compared to hard soil.
Apparently, the recommended values are identified from the selected long-period ground motions from databases of each soil condition and reflect the statistical characteristics of the spectrum energy and time-varying-intensity of long-period ground motions. Because of this, the recommended values can generally be used.
In a further study, more refined FEM models of high-rise structures will be introduced to investigate the real dynamic response and loss probability of high-rise structures.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}