
Identification of Tension Force in Cable Structures Using Vibration-Based and Impedance-Based Methods in Parallel



Abstract
:1. Introduction
2. Cable Force Identification Using Vibration-Based and Impedance-Based Methods
2.1. The Vibration-Based Method
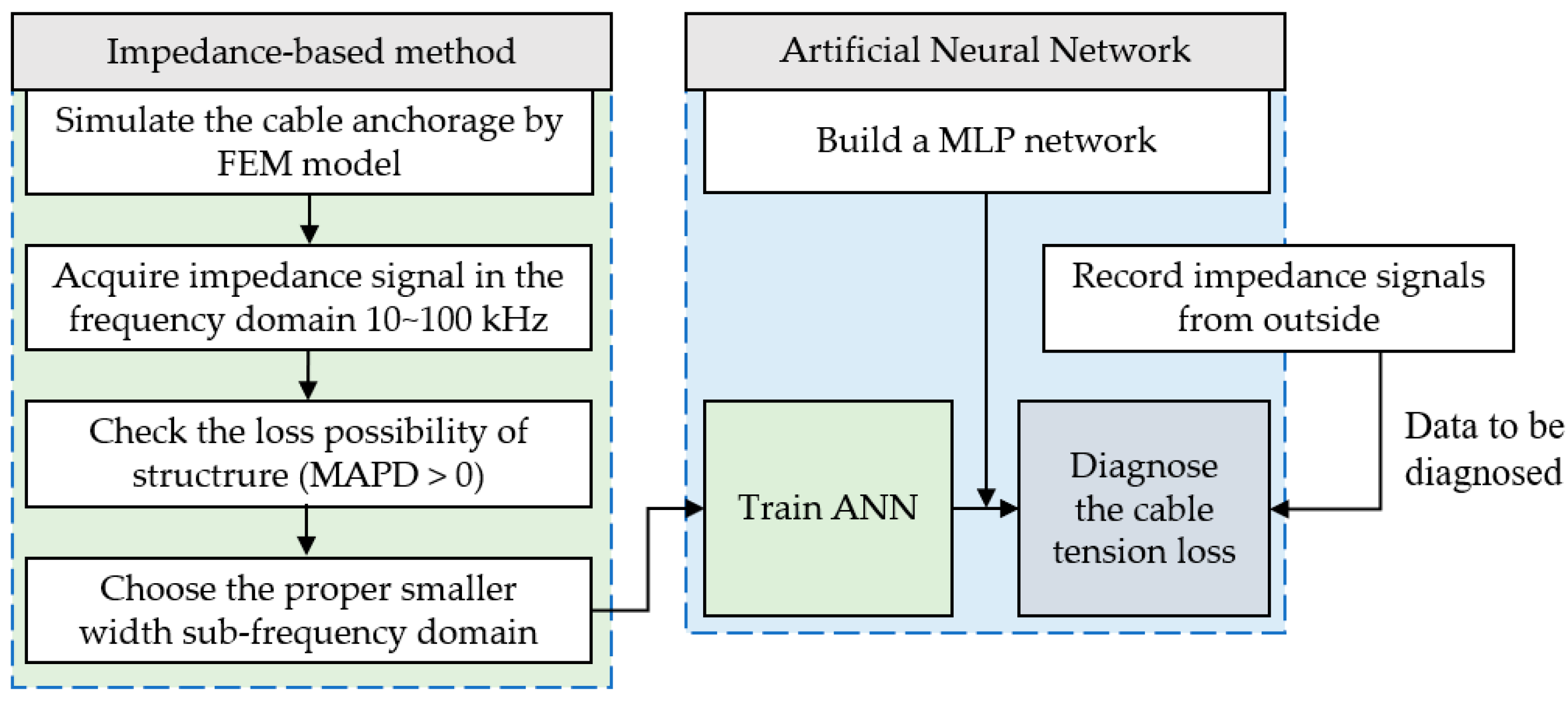
2.2. The Impedance-Based Method
2.2.1. Electro-Mechanical Impedance Responses
2.2.2. The Impedance-Based Damage Index
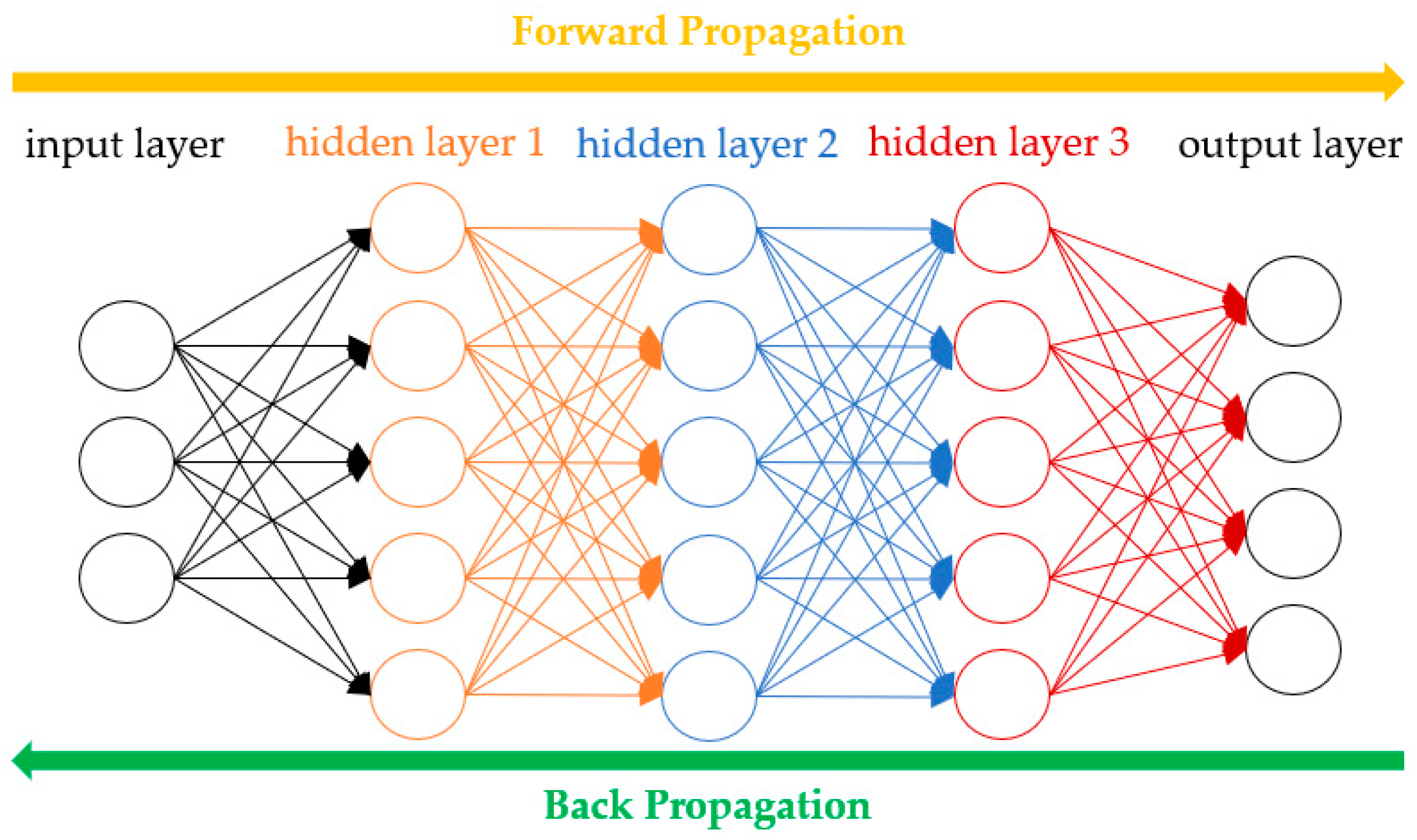
2.2.3. The Artificial Neural Network
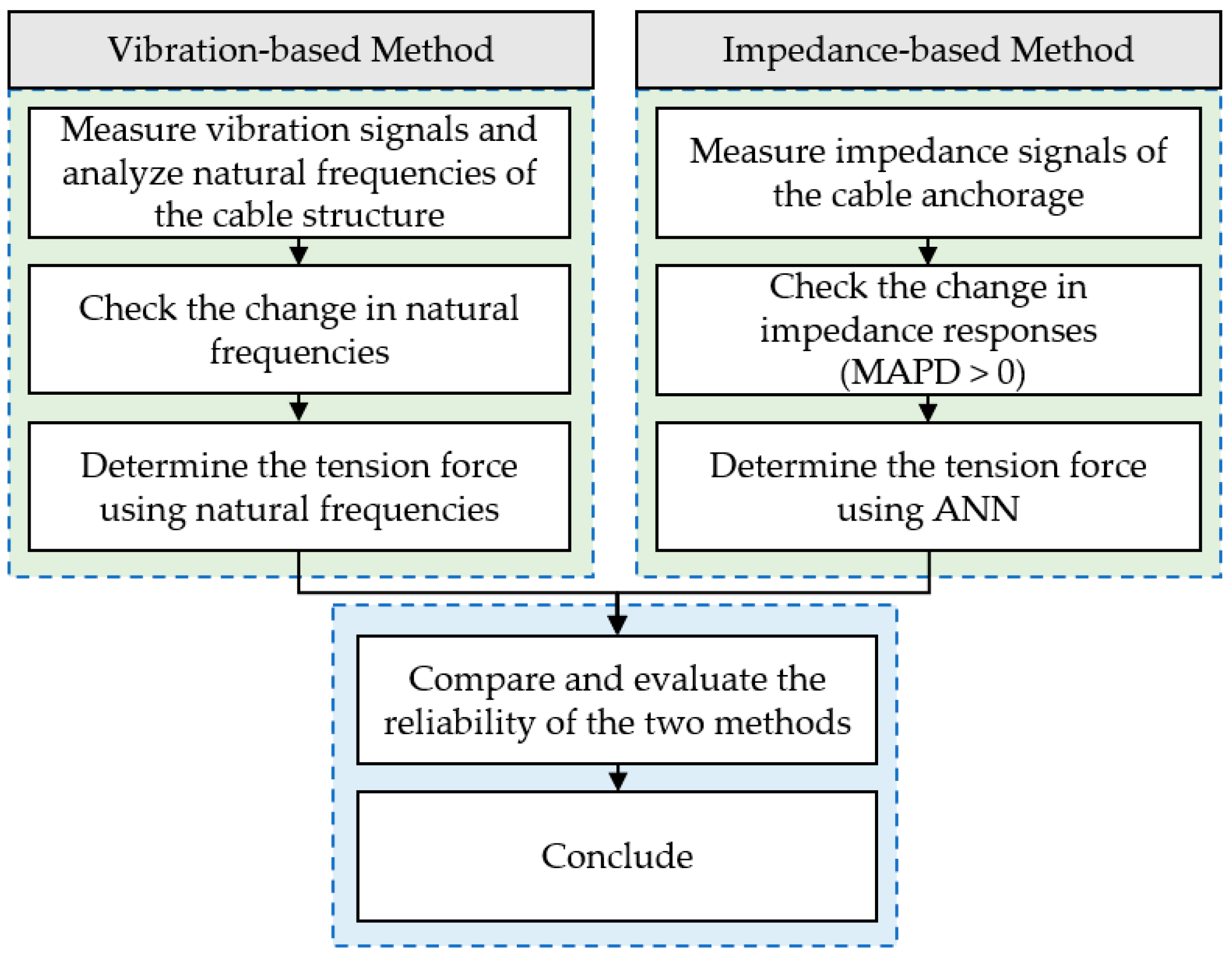
2.3. Vibration-Based and Impedance-Based Parallel Approach
3. Verifications
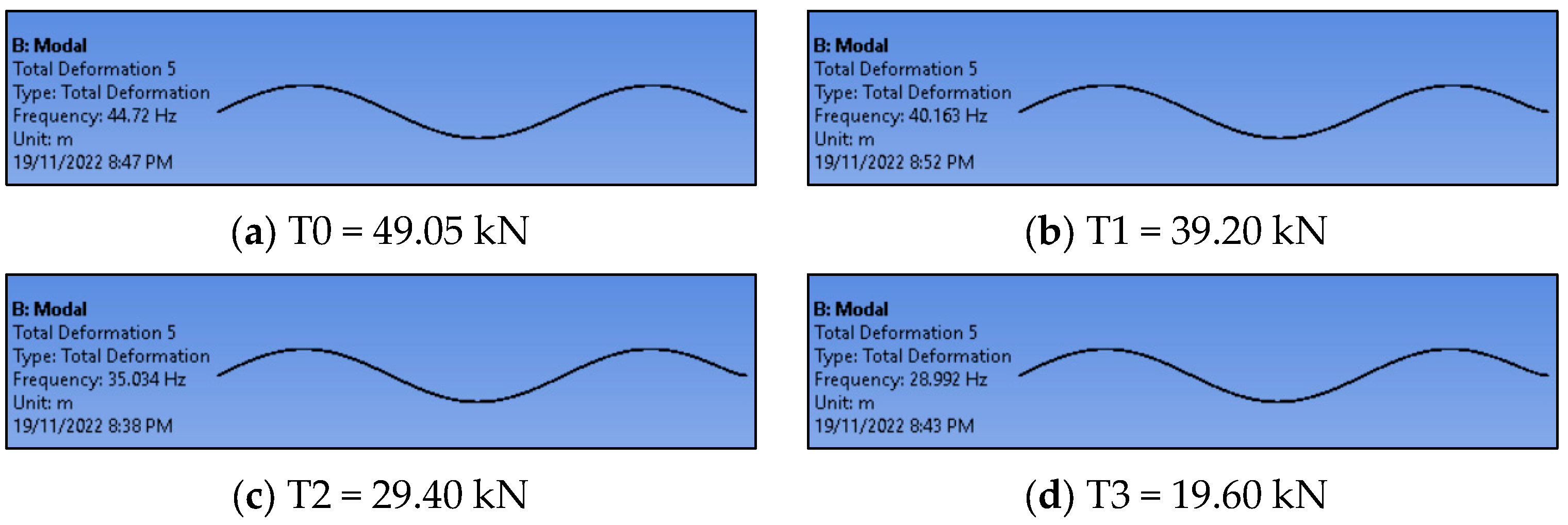
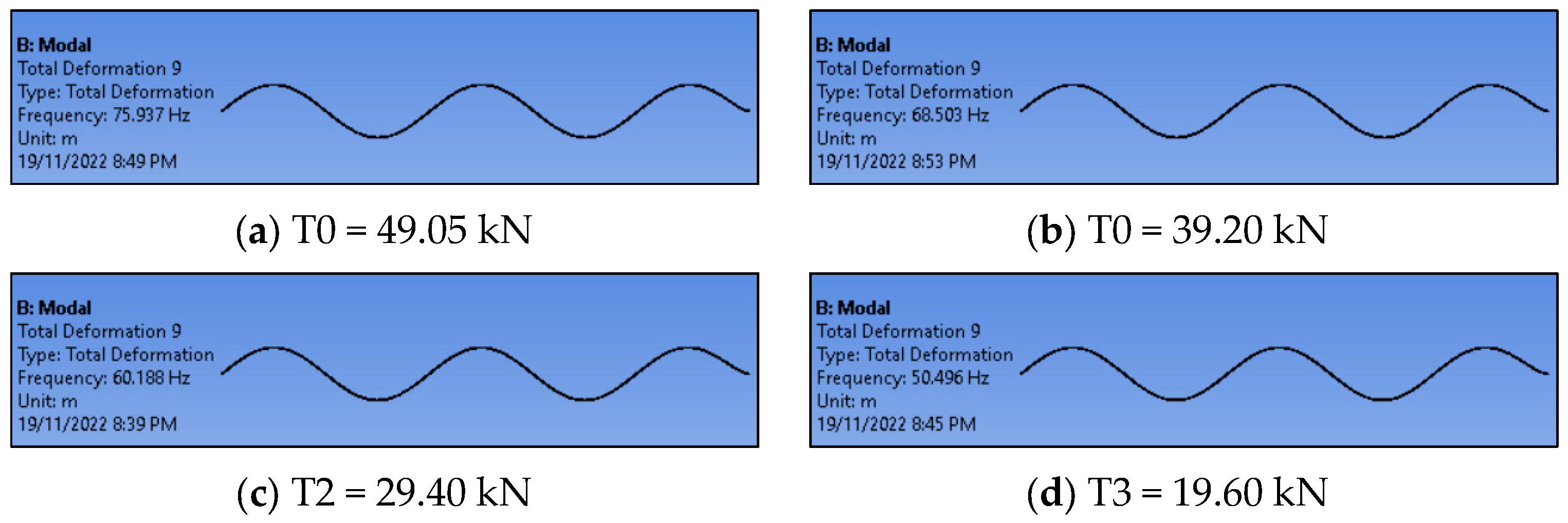
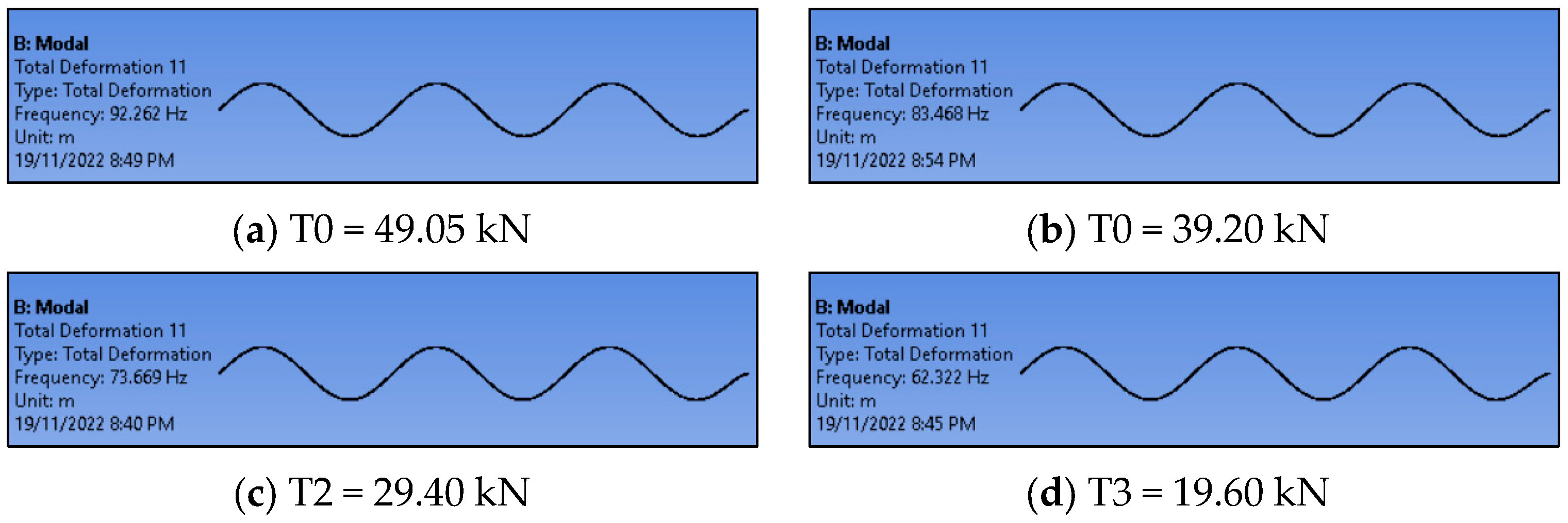
3.1. Estimation of Tension Force in Cable Structure Using the Vibration-Based Method
3.2. Detection of Cable Tension Loss Using the Impedance-Based Method
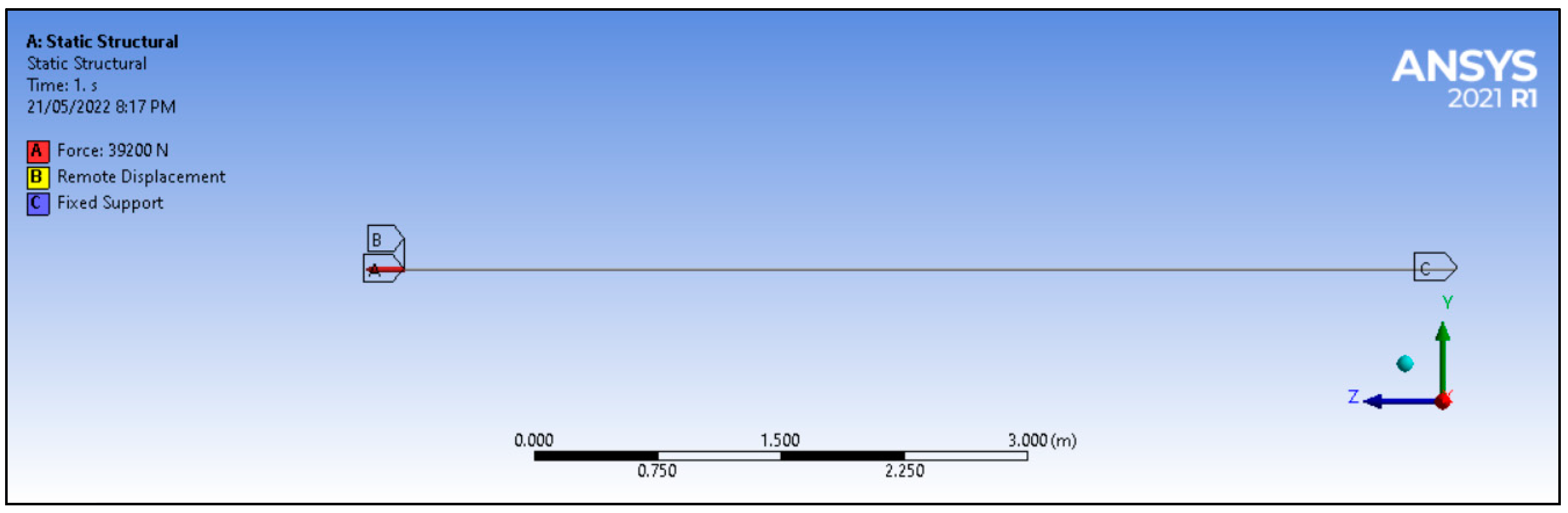
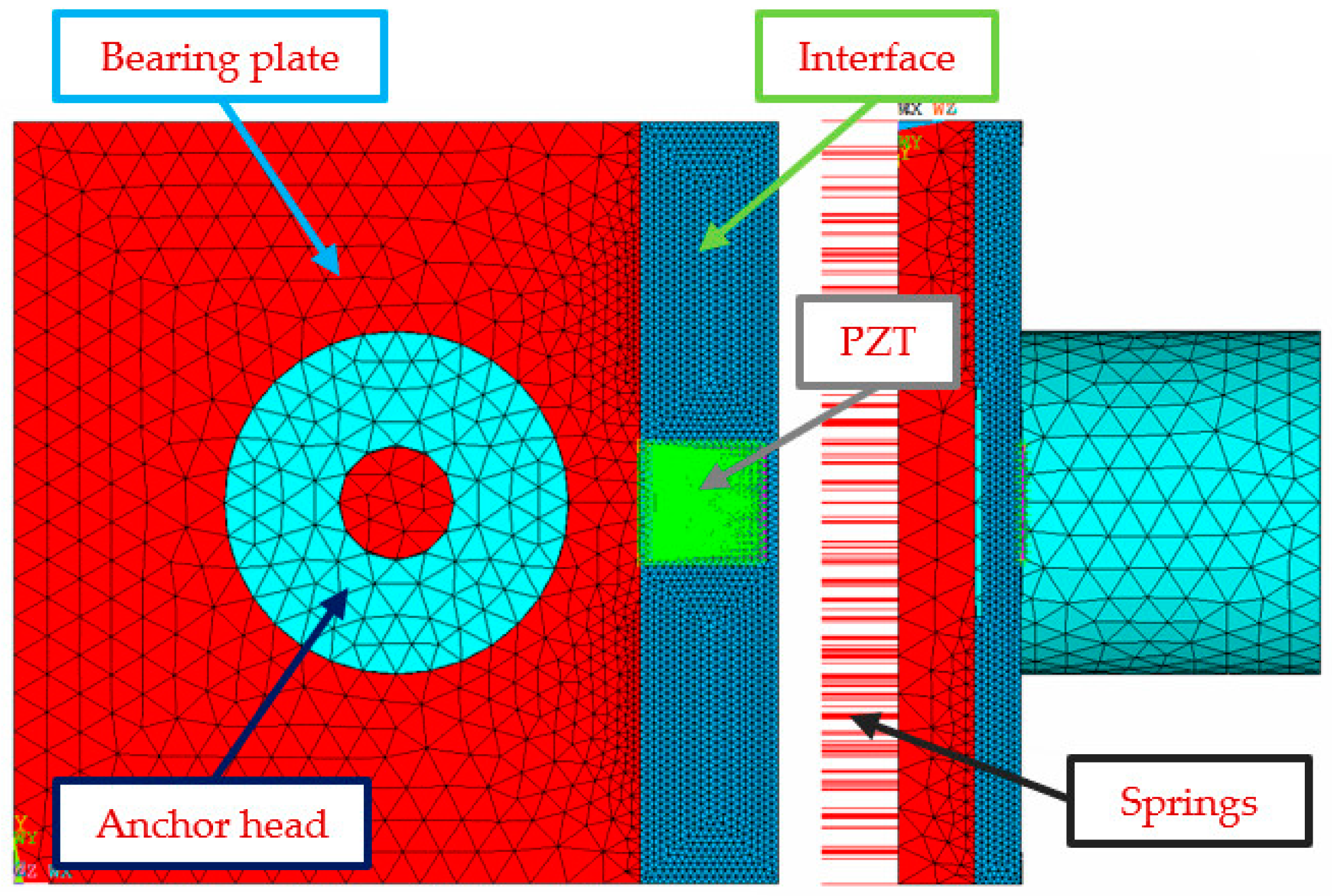
3.2.1. Cable Anchorage’s Finite Element Model
3.2.2. The Impedance Response and Damage Index
4. Identification of Cable Tension Using Vibration-Based and Impedance-Based Parallel Approach
4.1. Prediction of Cable Tension Using the Vibration-Based Method
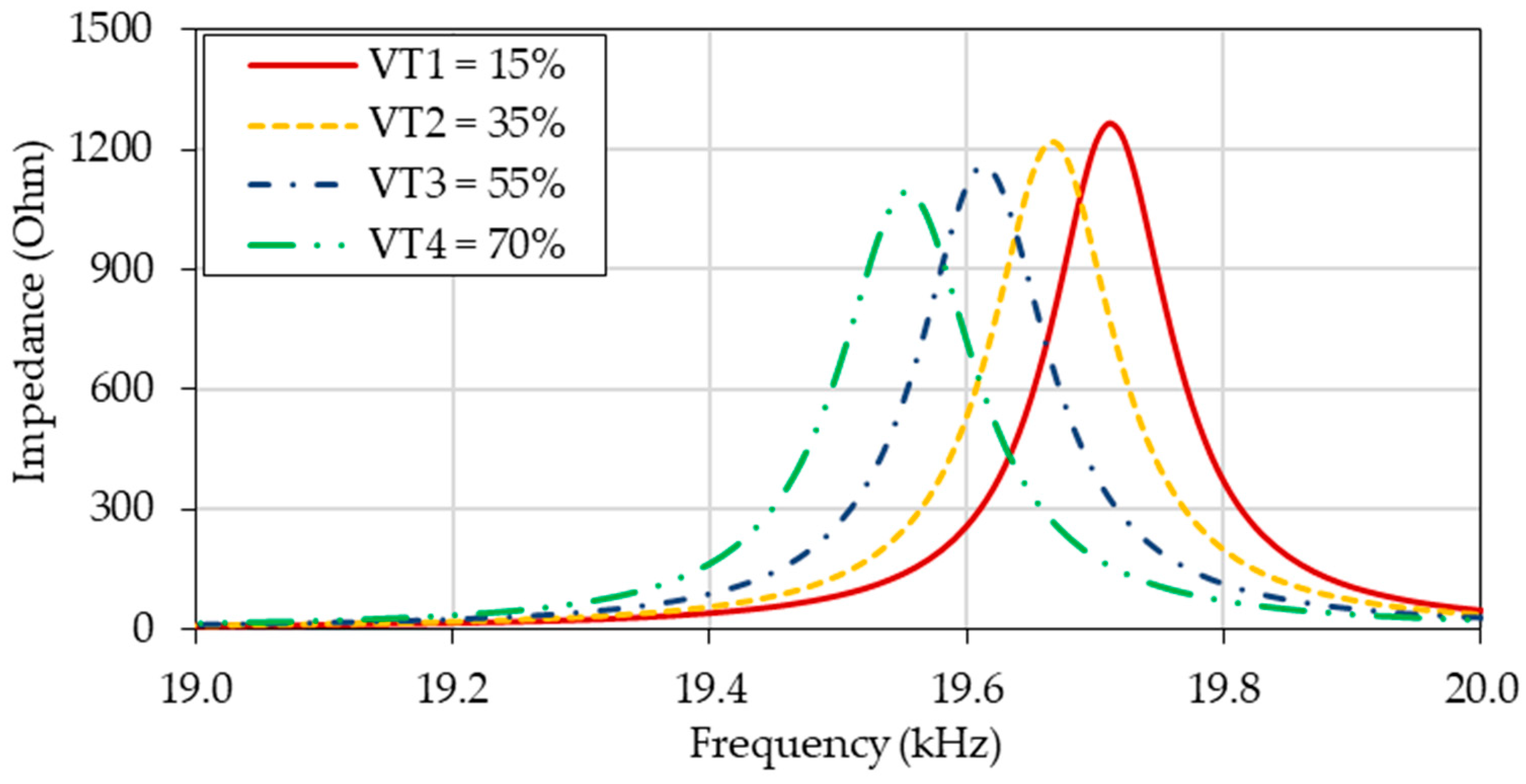
4.2. Prediction of Cable Tension Loss Using the Impedance-Based Method
4.3. Summary
5. Conclusions
- (1)
- The vibration and impedance responses obtained from the finite element models of the cable structure and the cable anchorage were reliable.
- (2)
- The identification of the cable tension using the vibration-based method gave the accurate results with the errors of less than 3%, which aligns with the experimental values.
- (3)
- The impedance-based method combined with the MLP ANN successfully identified the cable tension within the sub-frequency range 19–20 kHz. The impedance responses were fed into the MLP ANN to predict the cable tension with the errors of less than 2% for the cases inside the training domain, and the error of less than 11% for the case outside the training domain.
- (4)
- The identified tension forces of the cable structure were confirmed and concluded when the results of the two methods in the parallel approach showed the differences of less than 10%.
- (5)
- The simultaneous use of two techniques, including the vibration-based method and the impedance-based method, to identify the cable tension improved the reliability of the diagnostic results. Moreover, this helps to classify the damages in case the complex structures have multi-type of damages.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Tension force | |
| Mass per unit length of the cable | |
| Length of the cable | |
| Elastic modulus of the cable | |
| Constant cross-sectional moment of inertia of the cable | |
| Slack at vertical mid-span | |
| Flexural stiffness of the cable | |
| Displacement in the y direction of the cable at the position of x coordinate at time t when the cable vibrates | |
| Increased tension generated in the cable due to the vibration | |
| Natural frequency of the 1st mode, the 2nd mode, and the nth mode | |
| Angular frequency of the excitation voltage | |
| Harmonic voltage | |
| Amperage | |
| Electro-mechanical impedance | |
| Structural impedance of the anchorage and interface | |
| PZT impedance | |
| Width, thickness, length of the PZT sensor | |
| Modulus of PZT sensor at zero electric field | |
| Drag loss coefficient | |
| Dielectric coefficient of the PZT sensor when the stress is zero | |
| Dielectric loss coefficient | |
| Piezoelectric coefficient of the PZT sensor when the stress is zero | |
| Impedance responses before the cable tension loss | |
| Impedance responses after the cable tension loss | |
| Density | |
| Poisson coefficient | |
| Elastic deformation | |
| Dielectric coupling constant | |
| Dielectric constant |
References
- Irvine, H.-M.; Caughey, T.-K. The linear theory of free vibrations of a suspended cable. Proc. R. Soc. Lond. 1974, 341, 299–315. [Google Scholar] [CrossRef]
- Shinke, T.; Hironaka, K.; Zui, H.; Nishimura, H. Practical formulas for estimation of cable tension by vibration method. Proc. JSCE 1980, 294, 25–34. [Google Scholar] [CrossRef] [PubMed]
- Shimada, T. Estimating method of cable tension from natural frequency of high mode. Proc. JSCE 1994, 50, 163–171. [Google Scholar] [CrossRef] [PubMed]
- Zui, H.; Shinke, T.; Namita, Y. Practical formulas for estimation of cable tension by vibration method. J. Struct. Eng. 1996, 122, 651–656. [Google Scholar] [CrossRef]
- Bhalla, S.; Soh, C. Structural impedance based damage diagnosis by piezo-transducers. Earthq. Eng. Struct. Dyn. 2003, 32, 1897–1916. [Google Scholar] [CrossRef]
- Ren, W.-X.; Chen, G.; Hu, W.-H. Empirical formulas to determine cable tension using fundamental frequency. Struct. Eng. Mech. 2005, 20, 363–380. [Google Scholar] [CrossRef]
- Yu, C.-P.; Hsu, K.-T.; Cheng, C.-C. Dynamic monitoring of stay cables by enhanced cable equations. Proc. SPIE 2014, 9063, 204–210. [Google Scholar] [CrossRef]
- Hoang, N.; Nguyen, T.-N. Estimation of cable tension using measured natural frequencies. Procedia Eng. 2011, 14, 1510–1517. [Google Scholar] [CrossRef]
- Liang, C.; Sun, F.-P.; Rogers, C.-A. Coupled electro-mechanical analysis of adaptive material systems-determination of the actuator power consumption and system energy transfer. J. Intell. Mater. Syst. Struct. 1994, 5, 12–20. [Google Scholar] [CrossRef]
- Wang, X.-M.; Ehlers, C.; Neitzel, M. An analytical investigation of static models of piezoelectric patches attached to beams and plates. Smart Mater. Struct. 1997, 6, 204–213. [Google Scholar] [CrossRef]
- Zagrai, A.N.; Giurgiutiu, V. Electro-mechanical impedance method for crack detection in thin plates. J. Intell. Mater. Syst. Struct. 2001, 12, 709–718. [Google Scholar] [CrossRef]
- Ong, C.-W.; Lu, Y.; Soh, C.-K. The influence of adhesive bond on the electro-mechanical admittance response of a PZT patch coupled smart structure. In Proceedings of the Second International Conference, Singapore, 16–18 December 2002; Volume 16. [Google Scholar] [CrossRef]
- Park, G.; Sohn, H.; Farrar, C.-R.; Inman, D.-J. Overview of piezoelectric impedance-based health monitoring and path forward. Shock. Vib. Dig. 2003, 35, 451–464. [Google Scholar] [CrossRef]
- Ritdumrongkul, S.; Abe, M.; Fujino, Y.; Miyashita, M. Quantitative health monitoring of bolted joints using a piezoceramic actuator-sensor. Smart Mater. Struct. 2004, 13, 20. [Google Scholar] [CrossRef]
- Kim, J.-T.; Park, J.-H.; Hong, D.-S.; Park, W.-S. Hybrid health monitoring of prestressed concrete girder bridges by sequential vibration-impedance approaches. Eng. Struct. 2010, 32, 115–128. [Google Scholar] [CrossRef]
- Nguyen, K.-D.; Kim, J.-T. Numerical simulation of electro-mechanical impedance response in cable-anchor connection interface. J. Korean Soc. Nondestruct. Test. 2011, 30, 11–23. [Google Scholar]
- Ho, D.-D.; Nguyen, K.-D.; Lee, P.-D.; Hong, D.-S. Wireless structural health monitoring of cable-anchorage system using vibration and impedance responses measured by smart sensors. Sens. Smart Struct. Technol. Civ. Mech. Aerosp. Syst. 2012, 8345, 255–269. [Google Scholar] [CrossRef]
- Min, J.; Park, S.; Yun, C.-B.; Lee, C.-G.; Lee, C. Impedance-based structural health monitoring incorporating neural network techniques for identification of damage type and severity. Eng. Struct. 2012, 39, 210–220. [Google Scholar] [CrossRef]
- Huynh, T.-C.; Kim, J.-T. Impedance-base cable force monitoring in tendon-anchorage using portable PZT-interface technique. Math. Probl. Eng. 2014, 2014, 784731. [Google Scholar] [CrossRef]
- Huynh, T.-C.; Park, Y.-H.; Park, J.-H.; Kim, J.-T. Feasibility verification of mountable PZT-interface for impedance monitoring in tendon-anchorage. Shock. Vib. 2015, 2015, 262975. [Google Scholar] [CrossRef]
- Huynh, T.-C.; Dang, N.-L.; Kim, J.-T. Advances and challenges in impedance-based structural health monitoring. Struct. Monit. Maint. 2017, 4, 301–329. [Google Scholar] [CrossRef]
- Huynh, T.-C.; Ho, D.-D.; Dang, N.-L.; Kim, J.-T. Sensitivity of piezoelectric-base smart interfaces to structural damage in bolted connections. Sensors 2019, 19, 3670. [Google Scholar] [CrossRef] [PubMed]
- Pan, W.; Li, X.; Zhu, Z.; Zhao, K.; Xie, C.; Su, Q. Detection sensitivity of input impedance to local defects in long cables. IEEE Access 2020, 8, 55702–55710. [Google Scholar] [CrossRef]
- Fernandes, S.-R.-N.; Tsuruta, K.-M.; Rabelo, D.-S.; Finz, N.-R.-M. Impedance-based structural health monitoring applied to steel fiber-reinforced concrete structures. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 1–5. [Google Scholar] [CrossRef]
- Huynh, T.-C.; Nguyen, T.-D.; Ho, D.-D.; Dang, N.-L.; Kim, J.-T. Sensor fault diagnosis for impedance monitoring using a piezoelectric-based smart interface technique. Sensors 2020, 20, 510. [Google Scholar] [CrossRef]
- Dang, N.-L.; Pham, Q.-Q.; Lee, S.-Y.; Kim, J.-T. Vibration-impedance approaches for tendon monitoring in prestressed concrete structure. In Proceedings of the 2020 Structures Congress, St. Louis, MI, USA, 5–8 April 2020. [Google Scholar]
- Nguyen, B.-P.; Tran, Q.-H.; Nguyen, T.-T.; Pradhan, A.-M.-S.; Huynh, T.-C. Understanding impedance response characteristics of a piezoelectric-based smart interface subjected to functional degradations. Complexity 2021, 2021, 5728679. [Google Scholar] [CrossRef]
- Pham, Q.-Q.; Dang, N.-L.; Kim, J.-T. Smart PZT-embedded sensors for impedance monitoring in prestressed concrete anchorage. Sensors 2021, 21, 7918. [Google Scholar] [CrossRef]
- Nguyen, T.-T.; Phan, T.-T.-V.; Ho, D.-D.; Pradhan, A.-M.-S.; Huynh, T.-C. Deep learning-based autonomous damage-sensitive feature extraction for impedance-based prestress monitoring. Eng. Struct. 2022, 259, 114172. [Google Scholar] [CrossRef]
- Ho, D.-D.; Luu, T.-H.-T.; Pham, M.-N. Nondestructive crack detection in metal structures using impedance responses and artificial neural networks. Struct. Monit. Maint. 2022, 9, 221–235. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Loss Level (%) | Tension Force (kN) |
|---|---|---|
| T0 | 0 | 49.05 |
| T1 | 20 | 39.20 |
| T2 | 40 | 29.40 |
| T3 | 60 | 19.60 |
| Diameter | 15.2 mm | Mass per unit length | 1.37 kg/m |
| Elastic modulus | 190 MPa | Tensile strength | 260 kN |
| Poisson coefficient | 0.3 | Cross-sectional area | 138.7 mm2 |
| Case | Loss Level (%) | Tension Force (kN) | Natural Frequency (Hz) | |||||
|---|---|---|---|---|---|---|---|---|
| T0 | 0 | 49.05 | 14.76 | 29.64 | 44.72 | 60.12 | 75.94 | 92.26 |
| T1 | 20 | 39.20 | 13.23 | 26.58 | 40.16 | 54.1 | 68.5 | 83.47 |
| T2 | 40 | 29.40 | 11.49 | 23.13 | 35.03 | 47.35 | 60.19 | 73.67 |
| T3 | 60 | 19.60 | 9.44 | 19.05 | 28.99 | 39.43 | 50.5 | 62.32 |
| Case | Loss Level (%) | Infliction (kN) | Estimation (kN) | Difference (%) |
|---|---|---|---|---|
| T0 | 0 | 49.05 | 48.73 | 0.66 |
| T1 | 20 | 39.20 | 39.13 | 0.17 |
| T2 | 40 | 29.40 | 29.55 | 0.51 |
| T3 | 60 | 19.60 | 19.93 | 1.67 |
| Parameter | Symbol | Value |
|---|---|---|
| Elastic module | ||
| Density | ||
| Poisson coefficient | 0.3 | |
| Drag loss coefficient | 0.02 |
| Parameter | Symbol | Value |
|---|---|---|
| Elastic module | ||
| Density | ||
| Poisson coefficient | 0.33 | |
| Drag loss coefficient | 0.001 |
| Parameter | Symbol | Value |
|---|---|---|
| Elastic deformation | ||
| Dielectric coupling constant | ||
| Dielectric constant | ||
| Density | 7750 | |
| Drag loss coefficient | 0.0125 | |
| Dielectric loss coefficient | 0.015 |
| Component | Type | Number of Elements | Mesh Size (m) |
|---|---|---|---|
| Bearing plate | SOLID45 | 18,827 | |
| Anchor head | SOLID45 | 5408 | |
| Interface | SOLID45 | 73,846 | |
| PZT | SOLID5 | 225 | |
| Springs | COMBIN14 | 19,315 |
| Case | Loss Level (%) | Tension (kN) | Spring Stiffness (N/m) |
|---|---|---|---|
| T0 | 0 | 49.05 | |
| T1 | 20 | 39.20 | |
| T2 | 40 | 29.40 | |
| T3 | 60 | 19.60 |
| Case | Loss Level (%) | Frequency Range of 15–25 kHz | Frequency Range of 77–87 kHz | ||||
|---|---|---|---|---|---|---|---|
| Simulation (kHz) | Experiment (kHz) | Difference (%) | Simulation (kHz) | Experiment (kHz) | Difference (%) | ||
| T0 | 0 | 19.73 | 19.63 | 0.51 | 82.56 | 82.23 | 0.40 |
| T1 | 20 | 19.70 | 19.63 | 0.36 | 82.55 | 82.15 | 0.49 |
| T2 | 40 | 19.65 | 19.57 | 0.41 | 82.54 | 82.03 | 0.62 |
| T3 | 60 | 19.60 | 19.53 | 0.36 | 82.53 | - | - |
| Case | Loss Level (%) | Tension Force (kN) | Natural Frequency (Hz) | |||||
|---|---|---|---|---|---|---|---|---|
| VT1 | 15 | 41.69 | 13.63 | 27.38 | 41.36 | 55.69 | 70.46 | 85.78 |
| VT2 | 35 | 31.88 | 11.96 | 24.05 | 36.40 | 49.15 | 62.40 | 76.27 |
| VT3 | 55 | 22.07 | 10.00 | 20.15 | 30.63 | 41.57 | 53.11 | 65.37 |
| VT4 | 70 | 14.72 | 8.22 | 16.64 | 25.44 | 34.80 | 44.88 | 55.80 |
| Case | Loss Level (%) | Infliction (kN) | Prediction (kN) | Difference (%) |
|---|---|---|---|---|
| VT1 | 15% | 41.69 | 41.62 | 0.17 |
| VT2 | 35% | 31.88 | 32.00 | 0.39 |
| VT3 | 55% | 22.07 | 22.36 | 1.31 |
| VT4 | 70% | 14.72 | 15.10 | 2.61 |
| Case | Data Type | Loss Level (%) | Prediction (%) | Average (%) | Error (%) | ||||
|---|---|---|---|---|---|---|---|---|---|
| 1st | 2nd | 3rd | 4th | 5th | |||||
| T0 | Train | 0 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 |
| T1 | Train | 20 | 20.00 | 20.00 | 20.00 | 20.00 | 20.00 | 20.00 | 0.00 |
| T2 | Train | 40 | 40.00 | 40.00 | 40.00 | 40.00 | 40.00 | 40.00 | 0.00 |
| T3 | Train | 60 | 60.00 | 60.00 | 60.00 | 60.00 | 60.00 | 60.00 | 0.00 |
| VT1 | Predict | 15 | 14.77 | 14.36 | 14.39 | 14.21 | 14.72 | 14.49 | 3.40 |
| VT2 | Predict | 35 | 34.99 | 35.23 | 35.35 | 35.5 | 34.61 | 35.14 | 0.39 |
| VT3 | Predict | 55 | 54.27 | 55.29 | 55.72 | 54.34 | 55.76 | 55.08 | 0.14 |
| VT4 | Predict | 70 | 67.46 | 64.25 | 68.14 | 67.67 | 66.92 | 66.89 | 4.45 |
| Case | Loss Level (%) | Error (%) | ||
|---|---|---|---|---|
| 15–25 kHz | 17–22 kHz | 19–20 kHz | ||
| VT1 | 15 | 7.07 | 3.31 | 3.40 |
| VT2 | 35 | 2.30 | 0.84 | 0.39 |
| VT3 | 55 | 7.11 | 0.24 | 0.14 |
| VT4 | 70 | 22.11 | 7.65 | 4.45 |
| Case | Loss Level (%) | Infliction (kN) (1) | Vibration Method (kN) (2) | Impedance Method (kN) (3) | Difference (%) between (1) and (2) | Difference (%) between (1) and (3) |
|---|---|---|---|---|---|---|
| VT1 | 15 | 41.69 | 41.62 | 41.94 | 0.17 | 0.60 |
| VT2 | 35 | 31.88 | 32.00 | 31.81 | 0.39 | 0.22 |
| VT3 | 55 | 22.07 | 22.36 | 22.03 | 1.31 | 0.18 |
| VT4 | 70 | 14.72 | 15.10 | 16.24 | 2.61 | 10.33 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, M.-H.; Truong, T.-D.-N.; Le, T.-C.; Ho, D.-D. Identification of Tension Force in Cable Structures Using Vibration-Based and Impedance-Based Methods in Parallel. Buildings 2023, 13, 2079. https://doi.org/10.3390/buildings13082079
Nguyen M-H, Truong T-D-N, Le T-C, Ho D-D. Identification of Tension Force in Cable Structures Using Vibration-Based and Impedance-Based Methods in Parallel. Buildings. 2023; 13(8):2079. https://doi.org/10.3390/buildings13082079
Chicago/Turabian StyleNguyen, Minh-Huy, Tran-De-Nhat Truong, Thanh-Cao Le, and Duc-Duy Ho. 2023. "Identification of Tension Force in Cable Structures Using Vibration-Based and Impedance-Based Methods in Parallel" Buildings 13, no. 8: 2079. https://doi.org/10.3390/buildings13082079