
Design and Parameter Optimization of the Reduction-Isolation Control System for Building Structures Based on Negative Stiffness


Abstract
:1. Introduction
2. System Model
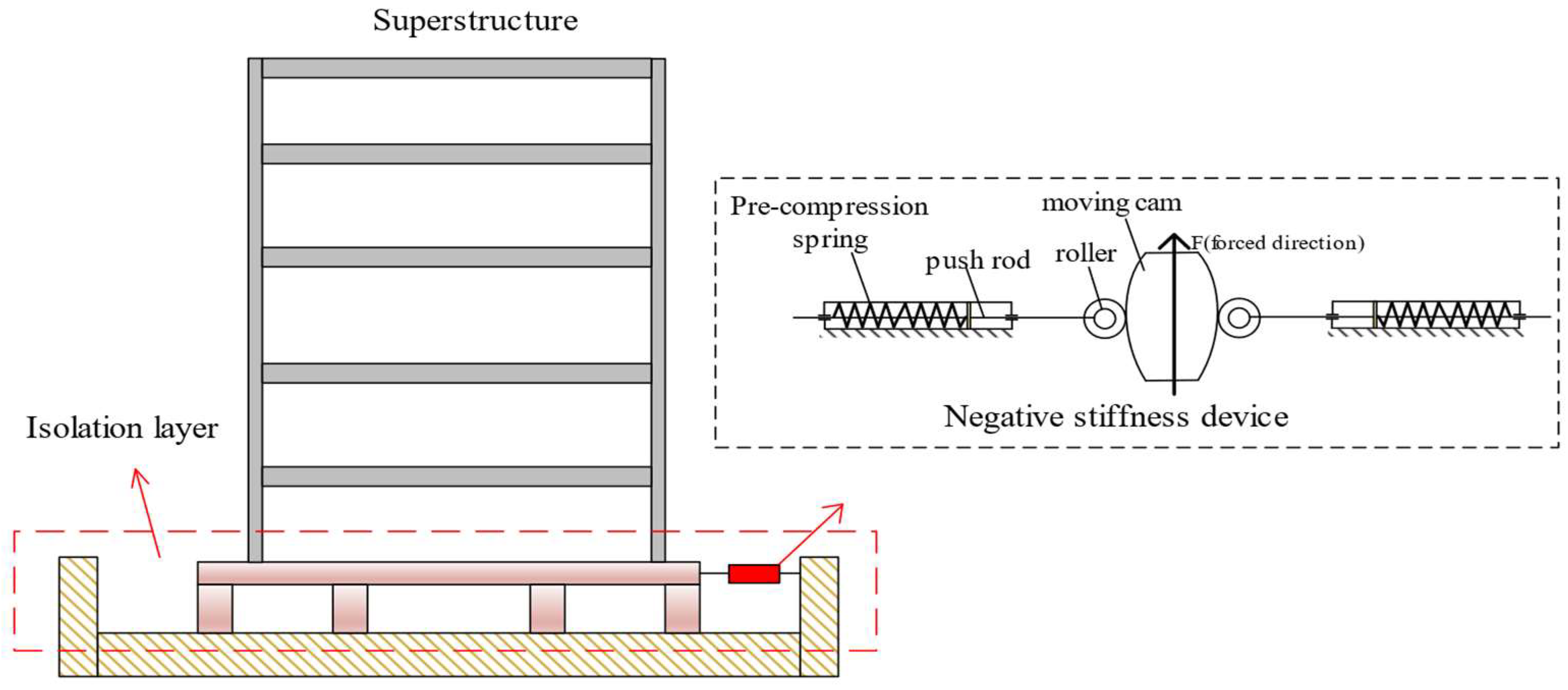
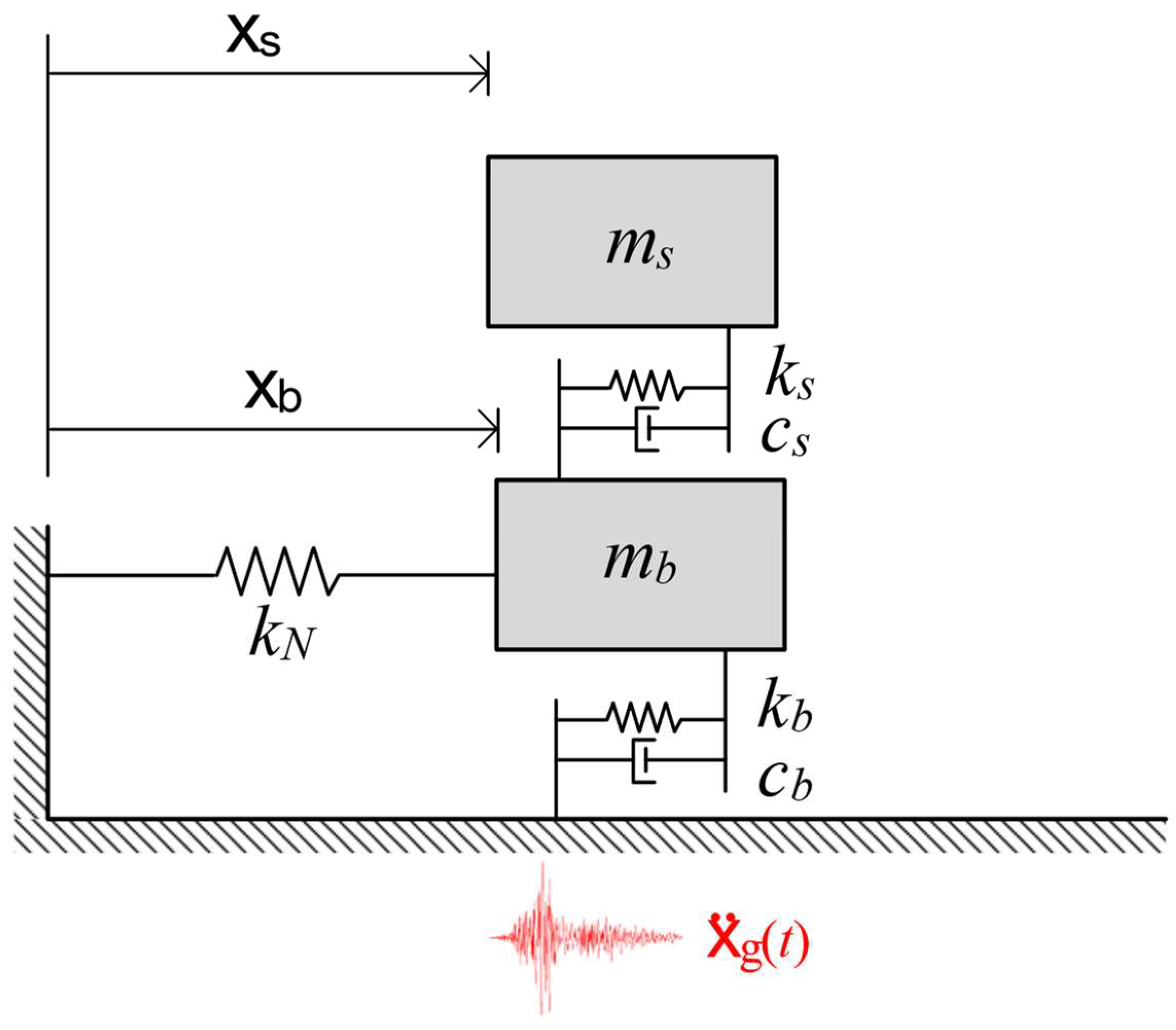
2.1. Coupled Negative Stiffness Isolation System
2.2. Theory of Calculation
2.3. System Stability
3. Optimal Design and Results
3.1. Relative Displacement of Superstructure Based on Norm Criterion
3.2. Relative Displacement between Superstructure and Foundation
3.3. Optimization Based on
3.4. Parameter Optimization Based on Monte Carlo Pattern Search Method
3.4.1.
3.4.2.
4. Verification in the Time Domain
5. Conclusions
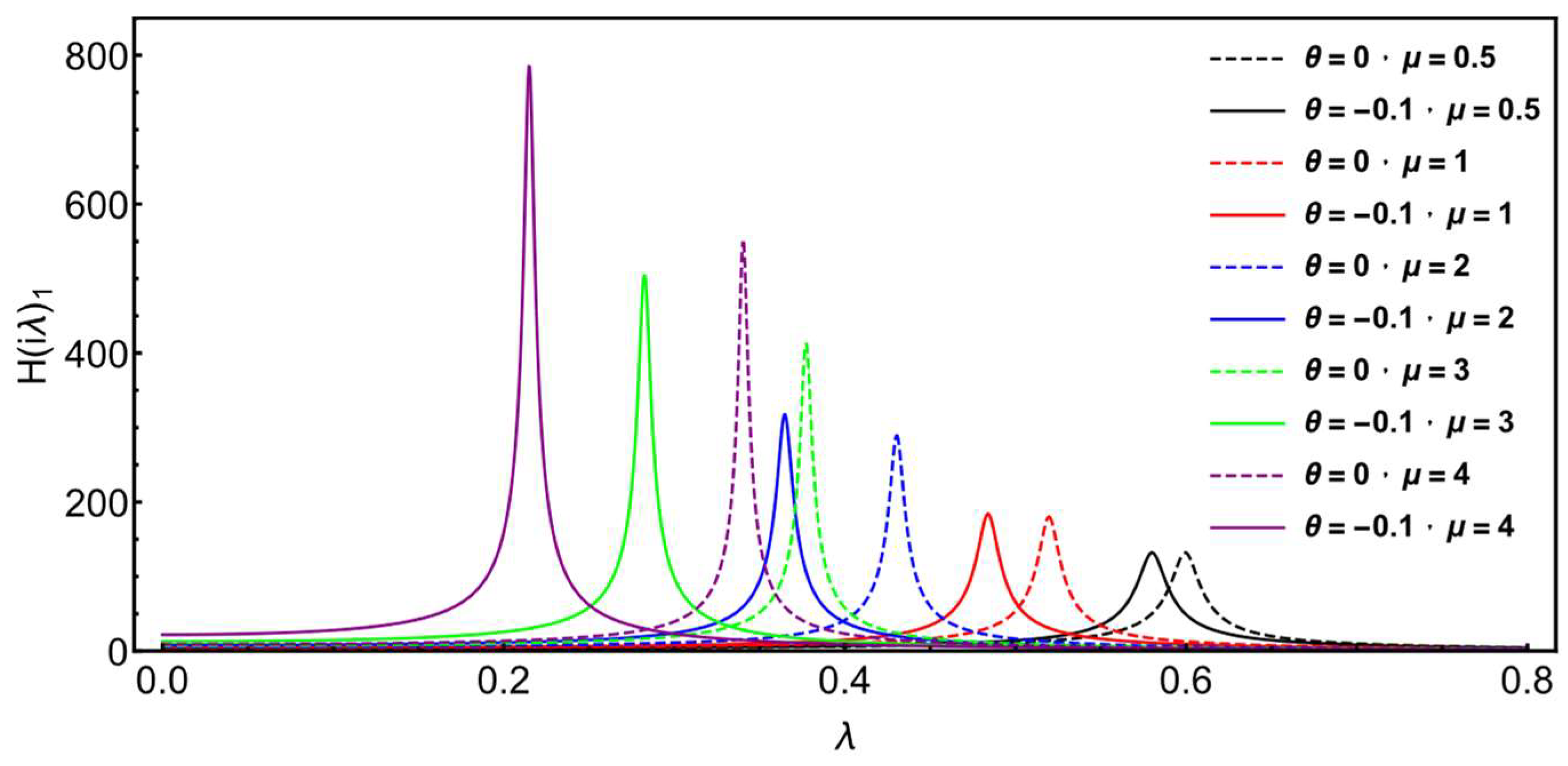
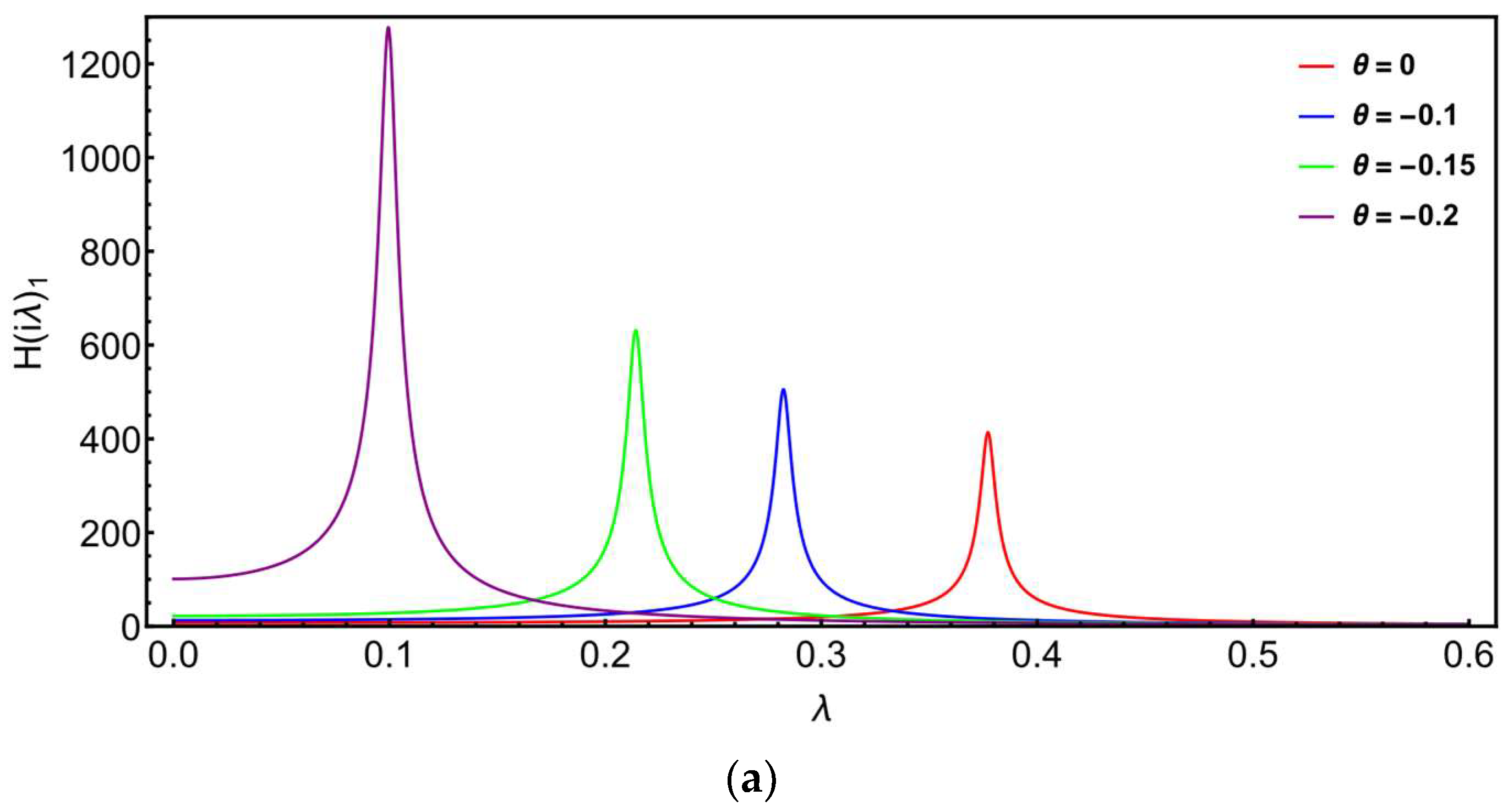
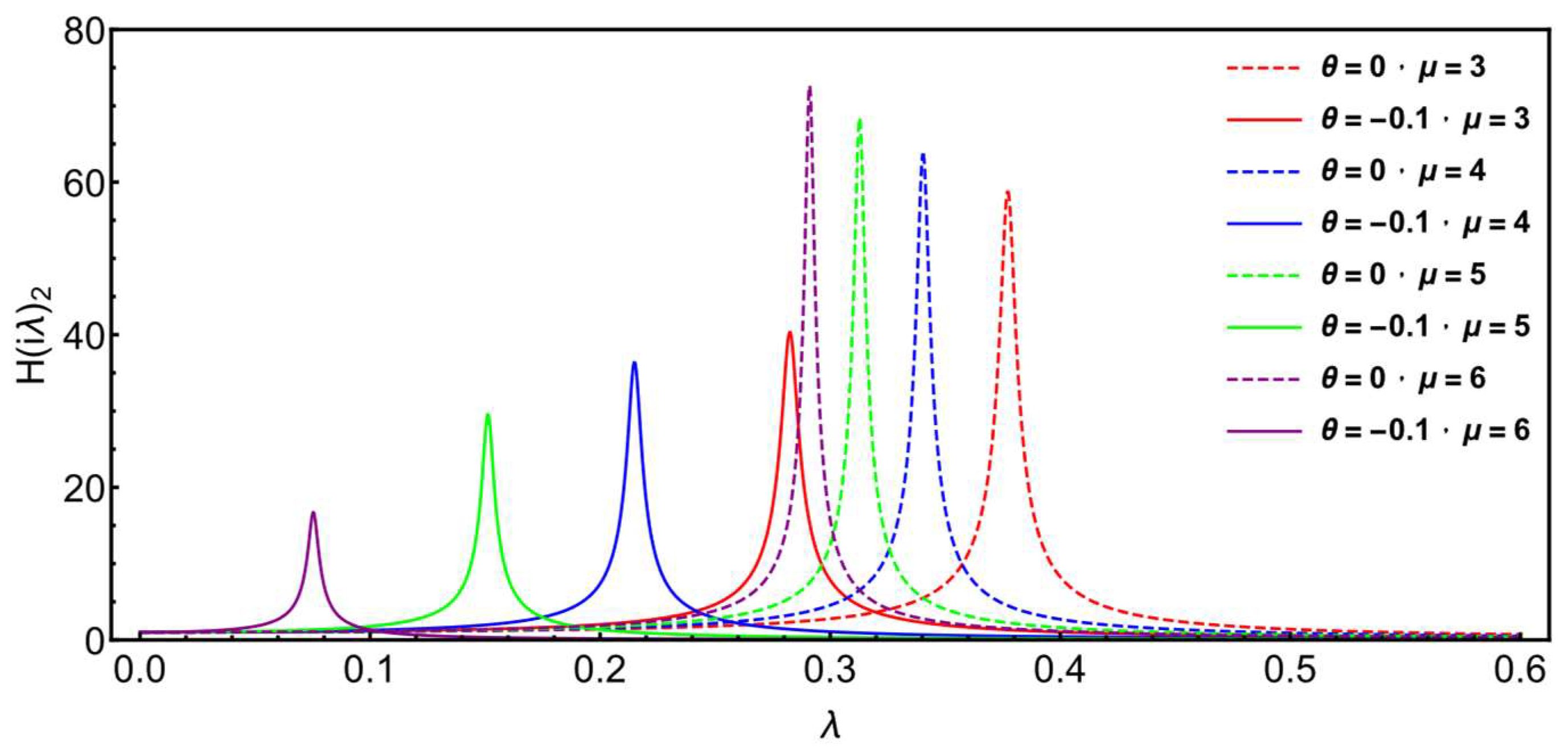
- When the stability condition is satisfied and the mass ratio is given, the smaller the negative stiffness ratio is, the stronger the vibration control effect of the negative stiffness device is, and the optimal mass ratio .
- Given other dimensionless parameters. The influence of the ratio of the frequency of the superstructure to the frequency of the base isolation layer f on the amplitude of the system frequency response function is: With the increase in frequency ratio , the vibration control ability of the isolation system with negative stiffness is gradually weakened. However, negative stiffness can still play a role in vibration control of building structures.
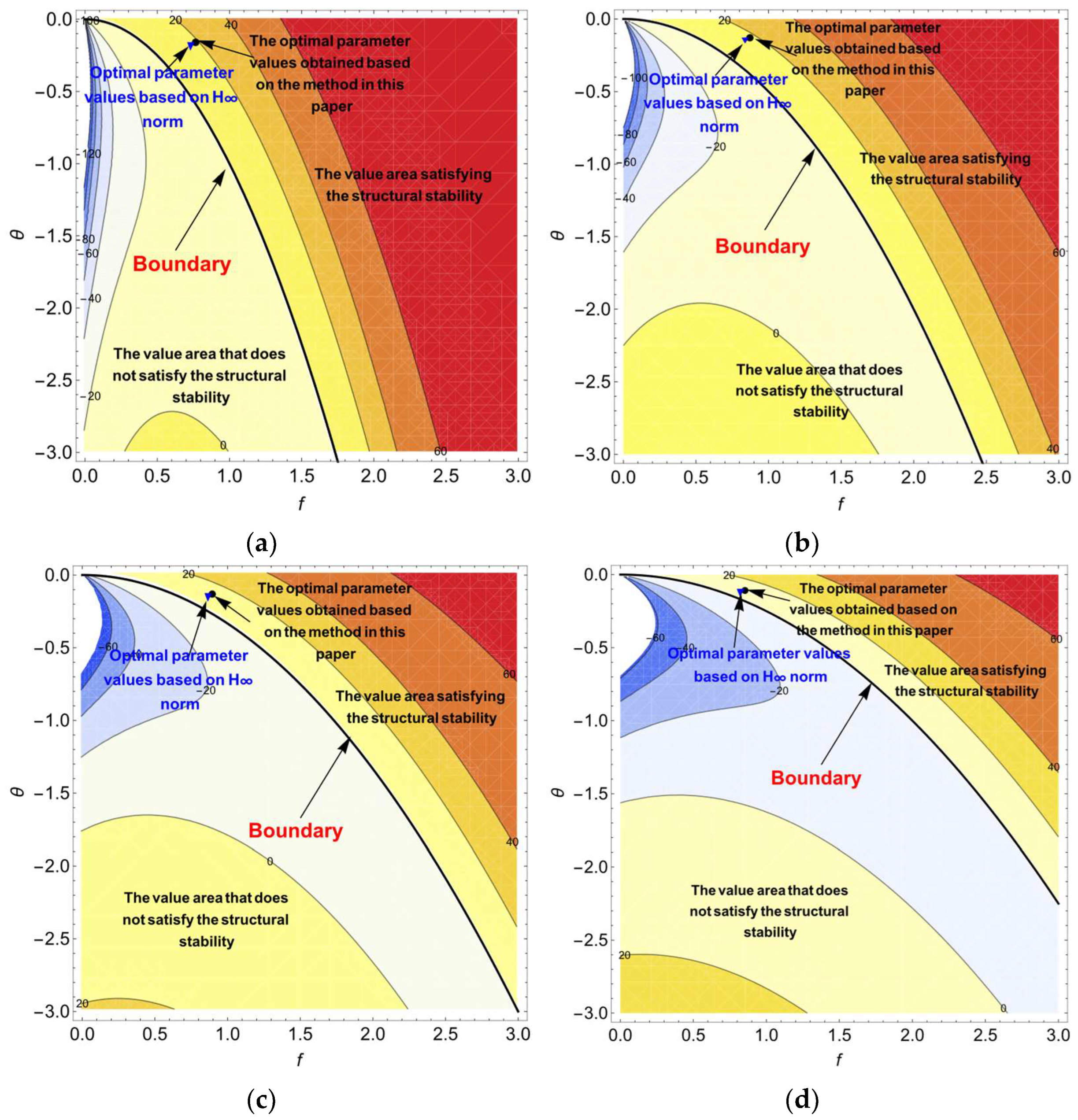
- The parameters defined in this paper are mass ratio , negative stiffness ratio , frequency ratio , damping ratio of superstructure and damping ratio of base isolation layer . The optimal frequency ratio was obtained by calculation and analysis.
- The structural damping ratio and can influence the energy dissipation capacity of building structures. When the damping ratio increases, the energy dissipation capacity of the building structure is enhanced, and the amplitude of the frequency response function of the two isolation systems is significantly reduced. On the contrary, the energy dissipation capacity is weakened. The change of structural damping ratio will not cause the change of resonance frequency between the building structure and seismic excitation.
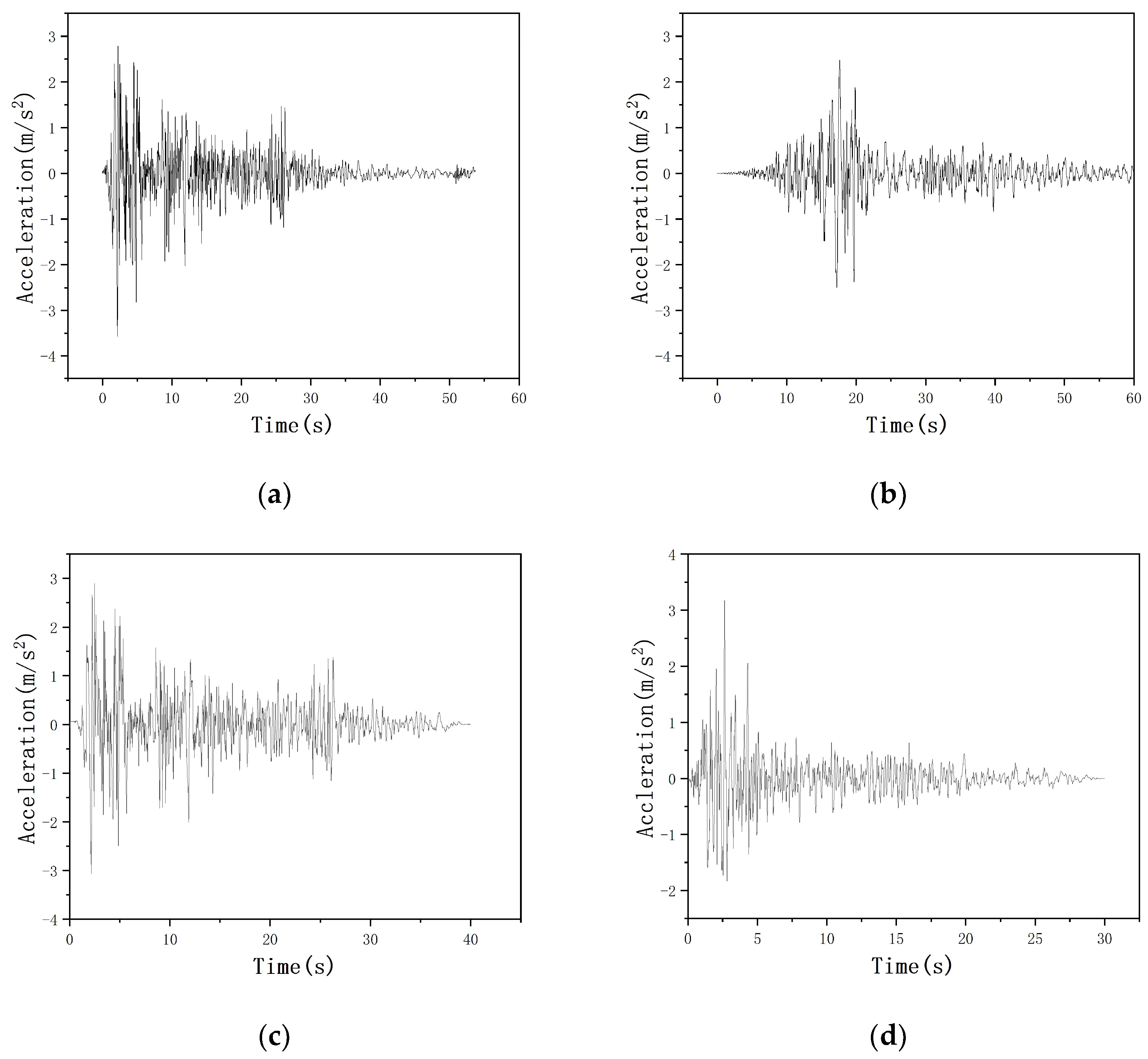
- Through the analysis of the time–history response results, it can be seen that the negative stiffness device achieves the expected role of controlling the natural vibration period of the structure and reducing the floor acceleration of the superstructure.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Bai, J.; Chen, H.; Zhao, J.; Liu, M.; Jin, S. Seismic design and subassemblage tests of buckling-restrained braced RC frames with shear connector gusset connections. Eng. Struct. 2021, 234, 112018. [Google Scholar] [CrossRef]
- Spencer, B.F.; Nagarajaiah, S. State of the art of structural control. J. Struct. Eng. 2003, 129, 845–856. [Google Scholar] [CrossRef]
- Platus, D.L. Negative-stiffness-mechanism vibration isolation systems. Vib. Control Microelectron. Opt. Metrol. 1992, 1619, 44–54. [Google Scholar]
- Mizuno, T.; Toumiya, T.; Takasaki, M. Vibration isolation system using negative stiffness. JSME Int. J. 2003, 46, 807–812. [Google Scholar] [CrossRef]
- Iemura, H.; Pradono, M.H. Passive and semi-active seismic response control of a cable-stayed bridge. Struct. Control Health Monit. 2002, 9, 189–204. [Google Scholar] [CrossRef]
- Iemura, H.; Pradono, M.H. Simple algorithm for semi-active seismic response control of cable-stayed bridges. Earthq. Eng. Struct. Dyn. 2005, 34, 409–423. [Google Scholar] [CrossRef]
- Li, H.; Liu, J.; Ou, J. Seismic response control of a cable-stayed bridge using negative stiffness dampers. Struct. Control Health Monit. 2011, 18, 265–288. [Google Scholar] [CrossRef]
- Li, H.; Liu, M.; Ou, J. Negative stiffness characteristics of active and semi-active control systems for stay cables. Struct. Control Health Monit. 2008, 15, 120–142. [Google Scholar] [CrossRef]
- Weber, F.; Distl, H. Semi-active damping with negative stiffness for multi-mode cable vibration mitigation: Approximate collocated control solution. Smart Mater. Struct. 2015, 24, 115015. [Google Scholar] [CrossRef]
- Gong, W.; Xiong, S. A new filter-based pseudo-negative-stiffness control for base-isolated buildings. Struct. Control Health Monit. 2017, 24, e1912. [Google Scholar] [CrossRef]
- Hogsberg, J. The role of negative stiffness in semi-active control of magneto-rheological dampers. Struct. Control Health Monit. 2011, 18, 289–304. [Google Scholar] [CrossRef]
- Weber, F.; Boston, C. Clipped viscous damping with negative stiffness for semi-active cable damping. Smart Mater. Struct. 2011, 20, 045007. [Google Scholar] [CrossRef]
- Wu, B.; Shi, P.; Ou, J. Seismic performance of structures incorporating magnetorheological dampers with pseudo-negative stiffness. Struct. Control Health Monit. 2013, 20, 405–421. [Google Scholar] [CrossRef]
- Shi, X.; Zhu, S. Magnetic negative stiffness dampers. Smart Mater. Struct. 2015, 24, 072002. [Google Scholar] [CrossRef]
- Shi, X.; Zhu, S. Simulation and optimization of magnetic negative stiffness dampers. Sens. Actuator A Phys. 2017, 259, 14–33. [Google Scholar] [CrossRef]
- Chen, L.; Sun, L.; Nagarajaiah, S. Cable with discrete negative stiffness device and viscous damper: Passive realization and general characteristics. Smart Struct. Syst. 2015, 15, 627–643. [Google Scholar] [CrossRef]
- Antoniadis, I.; Chronopoulos, D.; Spitas, V.; Koulocheris, D. Hyper-damping properties of a stiff and stable linear oscillator with a negative stiffness element. J. Sound Vib. 2015, 346, 37–52. [Google Scholar] [CrossRef]
- Kalathur, H.; Lakes, R.S. Column dampers with negative stiffness: High damping at small amplitude. Smart Mater. Struct. 2013, 22, 084013. [Google Scholar] [CrossRef]
- Dong, L.; Lakes, R. Advanced damper with high stiffness and high hysteresis damping based on negative structural stiffness. Int. J. Solids Struct. 2013, 50, 2416–2423. [Google Scholar] [CrossRef]
- Wang, M.; Sun, F.; Jin, H. Performance evaluation of existing isolated buildings with supplemental passive pseudo-negative stiffness devices. Eng. Struct. 2018, 177, 30–46. [Google Scholar] [CrossRef]
- Lai, Z.; Sun, T.; Nagarajaiah, S. Adjustable template stiffness device and SDOF nonlinear frequency response. Nonlinear Dyn. 2019, 96, 1559–1573. [Google Scholar] [CrossRef]
- Shen, Y.; Peng, H.; Li, X.; Yang, S. Analytically optimal parameters of dynamic vibration absorber with negative stiffness. Mech. Syst. Signal Process 2017, 85, 193–203. [Google Scholar] [CrossRef]
- Walsh, K.K.; Boso, E.; Steinberg, E.P.; Haftman, J.T.; Littell, W.N. Variable negative stiffness device for seismic protection of building structures through apparent weakening. J. Eng. Mech. 2018, 144, 04018090. [Google Scholar] [CrossRef]
- Wang, M.; Sun, F.; Yang, J.; Nagarajaiah, S. Seismic protection of SDOF systems with a negative stiffness amplifying damper. Eng. Struct. 2019, 190, 128–141. [Google Scholar] [CrossRef]
- Mathew, G.; Jangid, R.S. Seismic response control of a building by negative stiffness devices. Asian J. Civ. Eng. 2018, 19, 849–866. [Google Scholar] [CrossRef]
- Carrella, A.; Brennan, M.J.; Waters, T.P. Demonstrator to show the effects of negative stiffness on the natural frequency of a simple oscillator. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2008, 222, 1189–1192. [Google Scholar] [CrossRef]
- Iemura, H.; Igarashi, A.; Pradono, M.H.; Kalantari, A. Negative stiffness friction damping for seismically isolated structures. Struct. Control Health Monit. 2006, 13, 775–791. [Google Scholar] [CrossRef]
- Attray, N.; Symans, M.; Nagarajaiah, S.; Reinhorn, A.M.; Constantinou, M.C.; Taylor, D.; Sarlis, A.A.; Pasala, D.T.R. Application of Negative Stiffness Devices for Seismic Protection of Bridge Structures. In Proceedings of the Structures Congress 2012, Chicago, IL, USA, 29–31 March 2012. [Google Scholar]
- Toyooka, A.; Kouchiyama, O.; Iemura, H.; IKEDA, M. Development of the passive negative stiffness friction device and its verification through shaking table. Doboku Gakkai ROnbunshuu A 2010, 66, 148–162. [Google Scholar] [CrossRef]
- Zhou, P.; Li, H. Modeling and control performance of a negative stiffness damper for suppressing stay cable vibrations. Struct. Control Health Monit. 2016, 23, 764–782. [Google Scholar] [CrossRef]
- Chen, X.; Ikago, K.; Guan, Z.; Li, J.; Wang, X. Lead-rubber-bearing with negative stiffness springs (LRB-NS) for base-isolation seismic design of resilient bridges: A theoretical feasibility study. Eng. Struct. 2022, 266, 114601. [Google Scholar] [CrossRef]
- Pasala, D.T.R.; Sarlis, A.A.; Reinhorn, A.M.; Nagarajaiah, S.; Constantinou, M.C.; Taylor, D. Simulated bilinear-elastic behavior in a SDOF elastic structure using negative stiffness device: Experimental and analytical study. J. Struct. Eng. 2014, 140, 04013049. [Google Scholar] [CrossRef]
- Pasala, D.T.R.; Sarlis, A.A.; Reinhorn, A.M.; Nagarajaiah, S.; Constantinou, M.C.; Taylor, D. Apparent weakening in SDOF yielding structures using a negative stiffness device: Experimental and analytical study. J. Struct. Eng. 2015, 141, 04014130. [Google Scholar] [CrossRef]
- Luo, H.; Ikago, K.; Chong, C.; Keivan, A.; Phillips, B.M. Performance of low-frequency structures incorporated with rate-independent linear damping. Eng. Struct. 2019, 181, 324–335. [Google Scholar] [CrossRef]
- Luo, H.; Ikago, K. Unifying causal model of rate-independent linear damping for effectively reducing seismic response in low-frequency structures. Earthq. Eng. Struct. Dyn. 2021, 50, 2355–2378. [Google Scholar] [CrossRef]
- Liu, W.; Ikago, K. Feasibility study of the physical implementation of rate-independent linear damping for the protection of low-frequency structures. J. Build. Eng. 2021, 44, 103319. [Google Scholar] [CrossRef]
- Liu, W.; Ikago, K. Feasibility study of a passive rate-independent damping device for the seismic protection of low-frequency structures. Structures 2021, 34, 2499–2514. [Google Scholar] [CrossRef]
- Liu, W.; Ikago, K. Experimental study of earthquake input energy of low-frequency structures equipped with a passive rate-independent damping device. Struct. Control Health Monit. 2022, 29, e2883. [Google Scholar] [CrossRef]
- Liu, W.; Ikago, K. Causal implementation of rate-independent linear damping for the seismic protection of low-frequency structures. Structures 2022, 35, 274–288. [Google Scholar] [CrossRef]
- Li, H.; Li, J.; Yu, Y.; Li, Y. Modified adaptive negative stiffness device with variable negative stiffness and geometrically nonlinear damping for seismic protection of structures. Int. J. Struct. Stab. Dyn. 2021, 21, 2150107. [Google Scholar] [CrossRef]
- Wang, H.; Gao, H.; Li, J.; Wang, Z.; Ni, Y.; Liang, R. Optimum design and performance evaluation of the tuned inerter-negative-stiffness damper for seismic protection of single-degree-of-freedom structures. Int. J. Mech. Sci. 2021, 212, 106805. [Google Scholar] [CrossRef]
- Peng, Y.; Ma, Y.; Huang, T.; Domenico, D.D. Reliability-based design optimization of adaptive sliding base isolation system for improving seismic performance of structures. Reliab. Eng. Syst. Saf. 2021, 205, 107167. [Google Scholar]
- Ryan, E.G.; Drovandi, C.C.; McGree, J.M.; Pettitt, A.N. A Review of Modern Computational Algorithms for Bayesian Optimal Design. Int. Stat. Rev. 2016, 84, 128–154. [Google Scholar] [CrossRef]
- Azizi, M.; Talatahari, S.; Basiri, M.; Shishehgarkhaneh, M.B. Optimal design of low- and high-rise building structures by Tribe-Harmony Search algorithm. Decis. Anal. 2022, 3, 100067. [Google Scholar] [CrossRef]
- Jin, L.; Li, B.; Lin, S.; Li, G. Optimal Design Formula for Tuned Mass Damper Based on an Analytical Solution of Interaction between Soil and Structure with Rigid Foundation Subjected to Plane SH-Waves. Buildings 2023, 13, 17. [Google Scholar]
- Li, C.; Coster, D.C. Improved Particle Swarm Optimization Algorithms for Optimal Designs with Various Decision Criteria. Mathematics 2022, 10, 2310. [Google Scholar] [CrossRef]
- Zhang, M.; Xu, F. Tuned mass damper for self-excited vibration control: Optimization involving nonlinear aeroelastic effect. J. Wind. Eng. Ind. Aerodyn. 2022, 220, 104836. [Google Scholar] [CrossRef]
- Yazdi, A.E. Optimal control of a broadband vortex-induced vibration energy harvester. J. Intell. Mater. Syst. Struct. 2020, 31, 137–151. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. Improving the dynamic performance of base-isolated structures via tuned mass damper and inerter devices: A comparative study. Struct. Control Health Monit. 2018, 25, e2234. [Google Scholar] [CrossRef]
- Asami, T.; Nishihara, O.; Baz, A.M. Analytical Solutions to H∞ and H2 Optimization of Dynamic Vibration Absorbers Attached to Damped Linear Systems. J. Vib. Acoust. 2002, 124, 284–295. [Google Scholar]
- Abe, M.; Fujino, Y. Dynamic Characterization of Multiple Tuned Mass Dampers and Some Design Formulas. Earthq. Eng. Struct. Dyn. 1994, 23, 813–835. [Google Scholar] [CrossRef]
- Zuo, L.; Nayfeh, S.A. The Two-Degree-of-Freedom Tuned-Mass Damper for Suppression of Single-Mode Vibration Under Random and Harmonic Excitation. J. Vib. Acoust. 2006, 128, 56–65. [Google Scholar] [CrossRef]
- Cheung, Y.L.; Wong, W.O. H∞ and H2 Optimizations of a Dynamic Vibration Absorber for Suppressing Vibrations in Plates. J. Sound Vib. 2009, 320, 29–42. [Google Scholar] [CrossRef]
- MathWorks. MATLAB R2016b-Academic Use; The Mathworks Inc.: Natick, MA, USA, 2016. [Google Scholar]
- Luo, Y.; Sun, H.; Wang, X.; Chen, A.; Zuo, L. Parametric optimization of electromagnetic tuned inerter damper for structural vibration suppression. Struct. Control Health Monit. 2021, 28, e2711. [Google Scholar] [CrossRef]
- Lin, C.C.; Chen, C.L.; Wang, J.F. Vibration Control of Structures with Initially Accelerated Passive Tuned Mass Dampers under Near-Fault Earthquake Excitation. Comput.-Aided Civ. Infrastruct. Eng. 2010, 25, 69–75. [Google Scholar] [CrossRef]
- Martínez, C.A.; Curadelli, O. Testing and performance of a new friction damper for seismic vibration control. J. Sound Vib. 2017, 399, 60–74. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Earthquake | Maximum Displacement of Foundation (m) | Maximum Relative Displacement (m) | Maximum Acceleration Response of Superstructure (m/s2) | |||
|---|---|---|---|---|---|---|
| Negative Stiffness | No Negative Stiffness | Negative Stiffness | No Negative Stiffness | Negative Stiffness | No Negative Stiffness | |
| EL Centro | 0.0306 | 0.0704 | 0.0096 | 0.0150 | −10.0406 | 14.7249 |
| (56.53%) | (36%) | (31.81%) | ||||
| Chi-Chi | 0.0409 | 0.0482 | 0.0121 | 0.0102 | −11.6249 | −10.3546 |
| (15.15%) | (−18.63%) | (−12.27%) | ||||
| Imperial Valley | 0.0308 | 0.05987 | 0.0090 | 0.0128 | −10.0423 | −12.5145 |
| (48.55%) | (29.69%) | (19.75%) | ||||
| SanFernando | 0.0256 | 0.04849 | 0.0075 | 0.0103 | 8.0344 | −11.0387 |
| (47.21%) | (27.18%) | (27.22%) | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, X.; Li, S.; Hu, J. Design and Parameter Optimization of the Reduction-Isolation Control System for Building Structures Based on Negative Stiffness. Buildings 2023, 13, 489. https://doi.org/10.3390/buildings13020489
Kang X, Li S, Hu J. Design and Parameter Optimization of the Reduction-Isolation Control System for Building Structures Based on Negative Stiffness. Buildings. 2023; 13(2):489. https://doi.org/10.3390/buildings13020489
Chicago/Turabian StyleKang, Xiaofang, Shuai Li, and Jun Hu. 2023. "Design and Parameter Optimization of the Reduction-Isolation Control System for Building Structures Based on Negative Stiffness" Buildings 13, no. 2: 489. https://doi.org/10.3390/buildings13020489