1. Introduction
At present, there are many masonry buildings around the world, which can easily undergo a progressive collapse during earthquakes [
1]. Almost all of the damaged buildings in the 7.6 magnitude earthquake in the northern region of Pakistan in 2005 were masonry buildings [
2]. Moreover, over the past 100 years, 77 percent of fatalities were caused primarily by the progressive collapse of masonry buildings in earthquakes [
3]. Therefore, it is crucial to test the scaled masonry building models on a shaking table with the simulated seismic condition before many practical applications, as this can provide the response parameter to evaluate the tested structure model [
4,
5,
6].
Displacement is a typical response parameter employed to analyze seismic performance [
7]. There are many contact-based transducers that can be used to obtain the dynamic displacement response, such as dial gauges, fiber-based sensors and linear variable differential transformers (LVDTs) [
8]. However, when a structure is damaged, the contact-based transducer may be unavailable, which also greatly depends on experts’ experience in selecting the mounting positions. In addition, in progressive collapse experiments, contact-based transducer may be damaged due to the potential collapse risk, resulting in some property damage. To overcome these limitations, non-contact-based transducers have been applied to obtain the dynamic displacement response, such as the global positioning system (GPS), laser Doppler vibrometer (LDV) and terrestrial laser scanning (TLS) [
9]. GPS and TLS can only obtain the dynamic displacement response at lower sampling frequencies, which are not suitable for application on shaking tables [
10,
11]. LDV is one of the most reliable equipment for dynamic monitoring, but its high cost means be a significant expenditure [
12].
With its advantages of being non-contact and having a high frame rate, high precision and low cost, high-speed videogrammetry has been widely used for structure monitoring on the shaking table in civil engineering [
13]. The captured video date is processed to obtain the displacement response of the monitored target. However, in the field of progressive collapse experiments on the shaking table, the precision of the displacement response will be decreased because the indispensable protective facilities (e.g., protection frames [
14] to prevent the specimen from falling and foam and nylon string [
15] to prevent damage to the artifact) will occlude the monitoring targets. The monitored targets can be divided into two categories: natural targets [
16,
17] and artificial targets [
18,
19]. The natural targets usually disappear completely when they are occluded, making it impossible to obtain continuous displacement. To obtain the continuous displacement response under occlusion, the artificial targets which disappear partially are usually pasted on the surface of the interested key location of the tested objects [
20,
21,
22,
23,
24]. The ellipse target is widely used as one type of artificial target in photogrammetry and computer vision, because it is characterized by geometric and rotational invariance. Therefore, it is a fundamental prerequisite to accurately obtain the ellipse targets under partial occlusion in order to analyze the displacement response. The center and radius of the ellipse targets are obtained by a detection algorithm in the first frame. The pixel-wise motion is obtained by a tracking algorithm in image sequences. However, the detection and tracking of ellipse targets under partial occlusion need to be discussed in more detail.
In the field of ellipse detection, there are three generalized methods without designing for specific scenarios, including the Hough transform method [
25,
26], deep-learning methods [
27] and point-fitting methods [
28,
29,
30,
31]. The basic idea of the Hough transform method is that arbitrary edge pixels are voted into a 5D parameter space and then detecting the ellipse when the local peak occurs. But this is not compatible with the characteristics of large data owing to its heavy computation burden [
31]. Deep-learning methods are still inappropriate for direct ellipse detection due to the non-interpretability of the detection method and the high cost associated with manual annotation. What is more significant is its limited generalizability [
31]. Point-fitting methods use the connectivity between edge pixels and geometric constraints to fit ellipses accurately by finite edges. Furthermore, the method is especially valuable in partially occluded conditions, as it performs well in fitting ellipses even when supplied with limited arc segment information.
After the initial ellipse target is detected in the first frame, target tracking methods will be applied to obtain all the ellipse targets in image sequences. It is generally accepted that conventional object tracking methods can be divided into two categories: discriminative model methods and generative model methods [
32,
33,
34]. Discriminative model methods usually train samples using machine learning to track the region of detection [
34,
35,
36,
37]. However, it is difficult to determine the coordinates of the ellipse’s center at a sub-pixel level. The generative methods model the object area in the current frame and find the most similar area in the next frame. The methods can track ellipse targets at the sub-pixel level. Commonly used methods are those such as the mean shift method [
38] and optical flow method. The mean shift method is only suitable for single-target tracking. The Kanada-Lucas-Tomasi (KLT) method [
39] as a type of optical flow method that is more suitable for ellipse target tracking because its fundamentals are highly related with high-speed videogrammetry. But under partially occluded conditions, it is still difficult for the KLT method to track the targets accurately and effectively [
17].
This study investigated the displacement response issue with the help of ellipse targets under partially occluded conditions on a shaking table. In part, the partially occluded condition is caused by the introduction of nylon string that is used to protect the safety of the expensive shaking table and to reduce the shock to the cover-plate system, which is equipped to provide physical protection to the servo-hydraulic system in the reaction mass from falling debris and objects [
40]. Especially in the progressive collapse of masonry buildings experiments, partial or global facades will collapse with an increase in the seismic amplitude [
41]. Therefore, it is important to utilize the nylon string for protection. However, the introduction of the nylon string makes ellipse targets partially occluded, which decreases the accuracy of the displacement response. To address this issue, a novel high-speed videogrammetry framework is proposed, which mainly includes ellipse target detection, mutually guided tracking and 3D reconstruction. Our main contribution is to propose the mutually guided tracking method to solve the problem of ellipse target tracking under partial occlusion. Firstly, the strategy of ellipse-target loopback detection is used to update the initial KLT tracking model and to replace the initial result of tracking with that from the loopback detection. Secondly, the tiny offset is calculated through robust SIFT (scale-invariant feature transform) [
42] filtering to compensate for the deviations in local frames when the loopback detection is invalid. The sequential image coordinates of ellipse targets are obtained by the proposed tracking method. The 3D spatial coordinates are obtained by reconstruction of the image coordinates to analyze the displacement response to help monitor the masonry building on the shaking table.
The rest of this paper is organized as follows: The proposed methodology is expressed in
Section 2. The results and analysis of both the simulated experiments and the structural model experiments are delved into in
Section 3. Finally,
Section 4 presents the conclusions drawn from the study.
2. Methods
The entire framework of the proposed novel high-speed videogrammetric measurement method under a partially occluded environment is shown in
Figure 1, which mainly includes three key components: ellipse target detection, mutually guided tracking and 3D reconstruction. Firstly, the ellipse targets are detected in the first frame to obtain the center and radius using the arc-support line segment (LS) [
31] method, which is one of the widely used point-fitting methods. Secondly, after detecting the ellipse targets in the first frame, the proposed mutually guided tracking method is applied to obtain the image coordinates of all ellipse targets in image sequences. Finally, the 3D spatial coordinates of ellipse targets are reconstructed to obtain the displacement response. Additional details will be presented in the following sections.
2.1. Ellipse Target Detection in the First Frame
To obtain a precise dynamic displacement response in the high-speed videogrammetric measurements, the first step is to detect the ellipse targets accurately, including both the centers and the radii. The accuracy of the detection will directly affect the image sequence tracking and the ellipse-target 3D reconstruction results. Especially in the partially occluded environment, it is more difficult to detect the ellipse target accurately because the edge of the ellipse may be occluded by strings or other things. Thus, it is essential to fit a complete ellipse accurately only under finite ellipse edge conditions. The arc-support LS method, which is a type of point-fitting method, can be applied to fit an accurate ellipse by setting the completeness of the ellipse and the ratio of supported edge inliers. When the string goes through the central region of the ellipse, complete ellipses can be fitted well based on finite edges by using this method, which can determine the center and radius of the ellipse targets. The detected center is used to track the center of ellipse targets in image sequences and to reconstruct the 3D spatial coordinates. Many detected ellipses are outlying due to occlusion of the string. Thus, the radius is used to select the interested ellipse by prior knowledge. However, when the string goes through the edge region of the ellipse, available edges are damaged, so there will be some inaccuracy in fitting the ellipse. Thus, the first frame does not represent the photographic moment but, rather, the moment when the ellipse target is accurately detected. The center and radius of the ellipse target are accurate at this point.
2.2. Mutually Guided Tracking in Image Sequences
After detecting the initial ellipse targets in the first frame, the KLT method, which is a type of tracking method at the pixel level, is used to obtain the center in image sequences. But in a partially occluded environment, the accuracy of the KLT method is unsatisfactory. To overcome the inaccuracy of the KLT method in a partially occluded environment, a mutually guided tracking method is proposed to track ellipse targets accurately in image sequences. It includes three key components: the initial KLT tracking model, loopback detection and tiny offset compensation. The initial tracking model is built using the KLT method. When the protective string goes through the ellipse target, this will produce cumulative errors in the initial tracking model due to the different moving trends between the string and the ellipse target. Hence, the strategy of loopback detection is introduced in this study to eliminate these cumulative errors by updating the tracking model and replacing the initial tracking results with those from the loopback detection. The center of the ellipse targets is then compensated for by calculating the tiny offset through robust SIFT filtering to solve the problem of deviations when the loopback detection is invalid. The methods of KLT, loopback detection and tiny offset compensation are discussed as follows.
2.2.1. Initial Tracking Model Using the KLT Method
After detecting the ellipse targets in the first frame, the initial tracking model is also built according to KLT using the first frame. The assumptions of the KLT method are highly related to the high-speed videogrammetry. It assumes that the brightness is invariable in consecutive frames. In addition, it assumes that the movement of the object is very slow in consecutive frames. Since the exposure time of high-speed cameras is extremely short, the captured object exists in an instantaneous state during each frame. In the instantaneous state, the brightness is invariable, and the object (ellipse target in this study) is nearly stationary. Moreover, the method also assumes that the object has the same trends in mobility as the surrounding pixels. This is a highly consistent hypothesis because the ellipse target occupies an image block.
The specific process of the KLT method is expressed as follows. Under the assumptions of brightness invariance and mobility instantaneity, an obtained grayscale feature point
at frame
will be
at the
frame:
The Taylor expansion of the first-order term on the left-hand side is
Based on the assumption of the brightness invariance,
Divide both sides simultaneously by dt,
where
and
are the moving speed along the x-axis and y-axis, respectively. They can be denoted as
and
, respectively.
and
are the gradients along the x-axis and y-axis, respectively, which can also be denoted as
and
, respectively.
can be interpreted as the degree of change in the image gray level over time, denoted as
. Equation (4) can be rewritten as
Considering the third assumption, which states that all pixels within the image block of
has the same motion trends, there will be
formulas.
Then, it can be rewritten as
The least square equation can be listed as
The sequential image coordinates of the ellipse targets’ center are obtained using the KLT method. However, in the initial tracking model that is built using the first frame, matrix , which belongs to ellipse targets, will be substituted by some string grayscales , where represents the number of the string grayscale. The substitution of the string grayscale leads to inaccuracy due to different moving trends between the string and the ellipse target because they are not rigidly connected. If the initial tracking model is used for tracking, errors must be eliminated or they will accumulate gradually. To overcome the inaccuracy of the KLT method due to the substitution problem caused by partial occlusion, loopback detection and tiny offset compensation are proposed.
2.2.2. Loopback Detection
Ellipse target loopback detection is a redetection strategy conducted after the KLT approach. The typical strategy of tracking is to build the initial tracking model in the first frame and to track the ellipse target in the current frame. However, the initial tracking model will generate cumulative errors due to the introduce of the string. In terms of modelling methods, KLT utilizes the image gradient of the interested image block to track the center of ellipse targets. However, when the string occludes the central region of the ellipse target, the image block that should belong to the ellipse target will be substituted by the string. The phenomenon of image block substitution leads to the problem of inconsistent gradient-calculation changes due to the moving trend inconsistency between the string and the ellipse target. Hence, cumulative errors will be produced when using the initial tracking model. These can be eliminated by updating the tracking model using the loopback detection strategy. When the string goes through the central region of the ellipse target, the edges of the ellipse are at their clearest. As a result, it is opportune for accurate ellipse detection in the current frame. The tracking model is updated using the new image block in the current frame to track subsequent ellipse targets if the loopback detection is successful. And the initial result of the KLT approach will be replaced with the loopback detection result too. Cumulative errors will not be generated using the loopback detection strategy.
2.2.3. Tiny Offset Compensation
If the string occludes the edge of the ellipse target to some extent but the central region of the ellipse target is clear, the ellipse target loopback detection maybe invalid because finite edges are like straight line segments without curves. The invalid case only occurs in local frames due to the dynamic string. Although the image block of the tracking model is established around the center of ellipse targets, sub-pixel deviations may be generated because the phenomenon of image block substitution occurs in the region of the edges, not the center. Tiny offset compensation is proposed for the problem of deviations at the sub-pixel level in local frames using the updated tracking model.
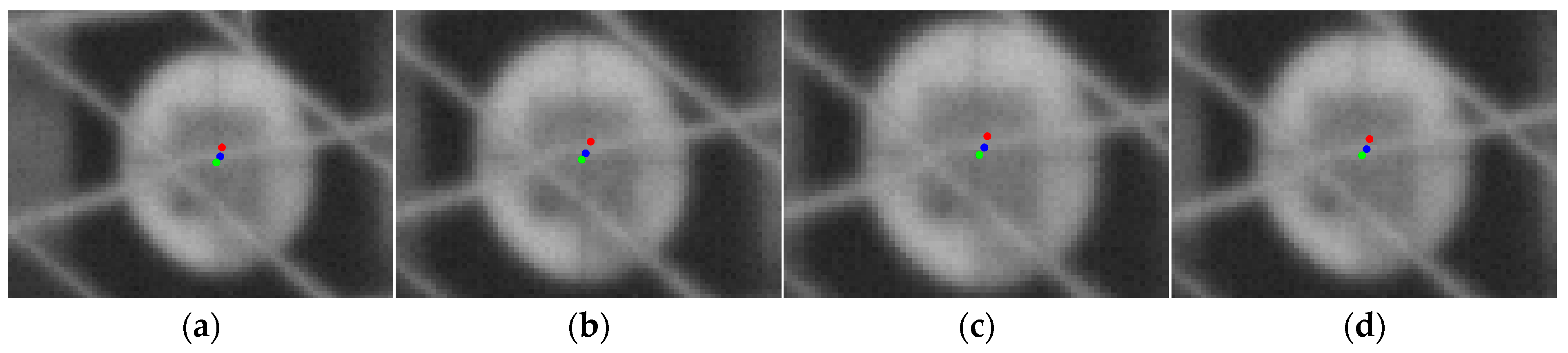
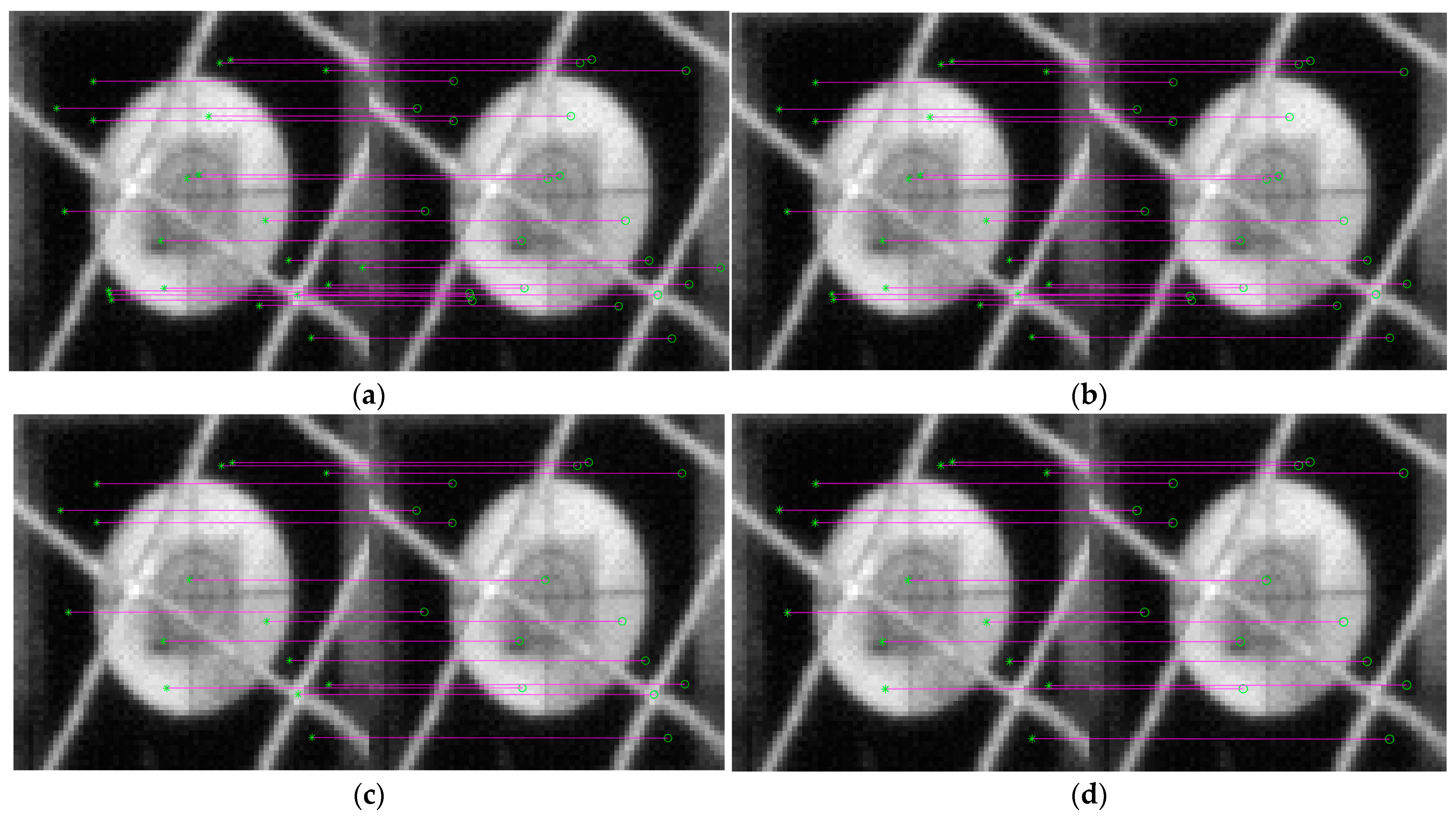
Figure 2 illustrates the schema of the tiny offset compensation using SIFT. Scale-invariant feature transform (SIFT) is a very stable local feature for image matching. Particularly in the consecutive image sequences where rotations, scales and brightness are all constant, SIFT is especially effective. In
Figure 2a, the left picture is the ellipse target in frame
, and the right picture is in frame
. It illustrates the image matching between neighboring frames. The blue and green points are the center of the ellipse target obtained by the KLT method. A little deviation of the center points is generated due to partial occlusion. The yellow and red points correspond to SIFT features that can still be detected accurately, either on the ellipse target or on the string. The red lines represent the moving string. In
Figure 2b, the tiny offset is calculated by the average of the overall shift value SIFT seed points because the motion of SIFT features on the ellipse target are the same as the center of the ellipse. If there are N inliers for matching, the average of shift values can be calculated by:
where
and
are the tiny offset values of the ellipse’s center along the x-axis and y-axis, respectively.
and
are the tiny offset values of the inliers on the x-axis and y-axis, respectively. The offset direction is determined by
and
. The center direction is determined by
and
, which are obtained through neighboring frames using the KLT method as shown in
Figure 2c. The condition of the compensation of the center is judged by the direction and numerical value. In image coordinates, the direction can be decomposed into x and y. If the signs of
and
are opposite, the value of compensation along the x-axis,
, is obtained by
. If the signs of
and
are the same, the value of
is equal to the smaller of
and
. The reason for selecting the smaller value as the compensation value is that the ellipse target will not have a large coordinate difference when it is captured by the high-speed camera. The condition of judgement in the y direction is same as with the x direction. The
values are added to the KLT result in
. Thus, to compensate for the deviations, effective filtering of SIFT features is proposed. As shown in
Figure 2b, the outliers will be eliminated.
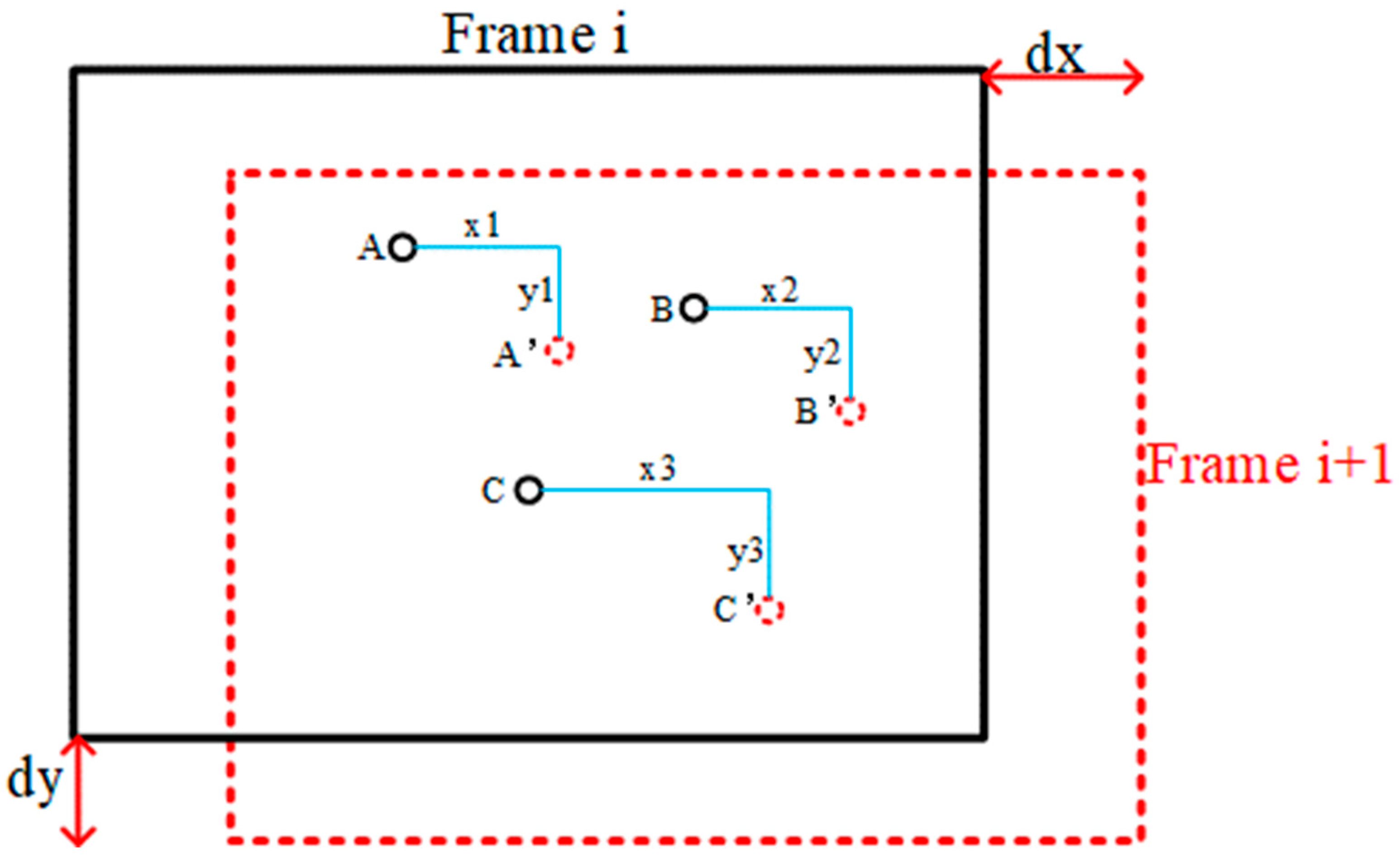
Typically, the RANSAC (Random Sample Consensus) method is used to filter SIFT features. Nevertheless, numerous mismatches still exist after RANSAC, especially for the ellipse targets. Therefore, this study proposes the distance constraint (DC) and rigid constraint (RC) to filter robust SIFT features. The DC is defined as the maximum shift value of SIFT feature points, calculated using the Euclidean distance (denoted as
) in the image coordinates between neighboring frames. A high-speed camera has a very high frame-per-second (fps) rate. So, objects in the image are almost nearly static between neighboring frames. When represented as image coordinates, the shift value between neighboring frames is exceedingly small, basically at the sub-pixel level. The DC between the
frame and the
frame is shown in
Figure 3. The shift value of C to C’ exceeds the DC, while the values of A to A’ and B to B’ fall within it. Consequently, the matching of A to A’ and B to B’ exhibits greater robustness compared with C to C’. They are considered inliers. Only SIFT features with shift values less than the DC can be classified as inliers.
After using the DC to filter the SIFT features, a few features still exist on the string. The rigid constraint (RC) is proposed to filter them based on the notion that the ellipse target can be considered rigid with regard to the structural model on the shaking table because of the powerful adhesion of the nanoglue. In contrast, the string is flexible with regard to the structural model when interacting. Due to the disparity in rigidity between the target and string, the direction of the shift values of SIFT features on the ellipse targets along the x-axis and y-axis is same as the center of the ellipse targets. In contrast, the direction is different when features are on the string. The features located on the ellipse target are inliers, while the features on the string are outliers. An efficient and simple way known as Otsu [
43], which is a binarization method, is used to reject outliers. Observing that the string is commonly brighter than the background, an adaptive threshold is obtained by Otsu for binarizing the string and the ellipse target. SIFT features located on the string are rejected based on their affiliation with either the prospects or background in the binarized image. The retained SIFT features through RANSAC, DC and RC processing are considered the robust SIFT seed points. They are used to calculate the tiny offsets for compensating for the deviations.
2.3. 3D Reconstruction and Displacement Response
After mutually guided tracking, the centers of the ellipse targets are obtained in image sequences. The corresponding tracking points in stereo images can be further matched manually. The reconstruction of 3D spatial coordinates of the tracking points can be calculated using techniques such as camera calibration [
44], PnP [
45] and bundle adjustment [
46]. The displacement means the distance from the current position of a tracking point relative to its initial position. It is calculated by
where
,
and
denote the displacement of the ellipse target in the X, Y and Z direction and
n frame, respectively.
,
and
are the spatial coordinates in the first frame.
,
and
are the spatial coordinates in the
n frame.
4. Conclusions
The dynamic displacement response is used to analysis the seismic performance of masonry buildings in progressively collapsing environments. For safety reasons, our experiments need to be surrounded by protective string to ensure the safety of the experimental environment. In this case, optically based non-contact measurements would be rendered ineffective due to occlusion by the protective string. To solve the limitation of partial occlusions in high-speed videogrammetric measurement, a new methodology is proposed to obtain the displacement response.
In this study, the experiments were conducted on a shaking table at the Beijing University of Civil Engineering and Architecture. The experimental structural model was observed by two high-speed cameras. To obtain an accurate displacement response, a novel high-speed videogrammetry framework was proposed, which mainly includes ellipse target detection, mutually guided tracking and 3D reconstruction. Our main contribution is the proposal of this mutually guided tracking method to solve the problem of ellipse target tracking under partial occlusion. The results presented in this paper clearly highlight the following points:
- (1)
The strategy of loopback detection is used to eliminate cumulative errors by updating the tracking model and replacing the initial results of tracking with those from the loopback detection.
- (2)
The ellipse target is compensated for to solve the problem of deviations at the sub-pixel level in local frames by conditional judgement about the center direction and tiny offsets when the loopback detection is invalid. The tiny offset is obtained through robust SIFT filtering.
Based on the two points mentioned above, this study can achieve the accurate sub-pixel location of ellipse targets in image coordinates. This ensures single-point displacement measurement accuracy at the sub-millimeter level and interlayer displacement measurement accuracy at the millimeter level. It satisfies the health monitoring of masonry buildings on the shaking table. In a progressive collapse experimental environment, the proposed methodology prioritizes the safety of personnel and the shaking table. It reduces the potential economic losses that could be caused by using contact transducers, all while ensuring high measurement accuracy. There are some limitations of the proposed method herein: (a) the ROIs needed to be manually selected; (b) the result of detection is demanding for imaging, especially in the occluded experiments; (c) the solving efficiency needs to be improved. Future studies are still required to improve the robustness and intelligence of the method.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}