1. Introduction
Structural health monitoring (SHM), including long-term and real-time monitoring, can timely detect structural damage, which is of great significance to avoid sudden failures and ensure the reliability of structures. Over the past decades, it has been widely explored and applied in civil engineering [
1,
2]. Furthermore, structural damage identification (SDI), as a key issue in SHM, has received extensive attention. When damage occurs, the material and geometric characteristics of the structures will change, affecting their strength, stiffness, and stability. Conventional damage identification methods are local methods, which cannot easily detect the damage inside structures and are not efficient for complex structures. Therefore, as global SHM techniques, vibration-based damage identification methods have been extensively used for SDI [
3,
4].
The vibration-based damage identification methods can be categorized into data-based and model-based approaches [
5,
6]. For the former, the commonly used methods are machine learning [
7], deep learning [
8], wavelet transform [
9], and time series analysis [
10], etc. These methods do not require finite element models (FEMs), which can avoid modeling errors. Nevertheless, the large amounts of data will cause difficulties in the data processing. Moreover, damage severity cannot be accurately quantified in most cases. For the latter, the main approaches include optimization algorithms-based [
11] and Bayesian inference-based [
12] model updating, etc. Although these model-based approaches can accurately locate the damage and quantify its severity, establishing accurate FEMs is extremely difficult, and modeling errors are inevitable.
Convolutional neural networks (CNN), as one of the representative data-based methods, can solve complex pattern classification and regression problems in practical engineering [
13]. They have the characteristics of local connection, weight sharing, and down-sampling, which can greatly reduce network parameters and model complexity, as well as prevent over-fitting [
14]. At present, they have been extensively applied to vibration-based SDI. Lin et al. [
15] used a CNN to extract features from acceleration data of a simply supported beam, and accurately identify damage location using both a noise-free and a noisy data set. Abdeljaber et al. [
16] proposed a CNN-based method of the damage localization using acceleration signals and verified its effectiveness by monitoring the main steel frame of the Qatar University grandstand simulator. Subsequently, an enhanced CNN-based method, which learns optimal features of signals to maximize the classification accuracy by the CNN, was proposed and precisely estimated the health condition of the American Society of Civil Engineers (ASCE) benchmark structure [
17]. Azimi and Pekcan [
18] utilized a CNN to extract the features of acceleration response, and then compressed the response data of a discrete histogram to effectively locate damage for frame structures. To summarize, CNN has an excellent performance in feature extraction and great potential in dealing with massive data in SDI [
19]. Although the CNN-based method can robustly detect the occurrence and location of structural damage owing to the outstanding classification ability of CNNs, the structural damage severity can hardly be accurately quantified.
The optimization algorithms-based model updating method is the most representative model-based method. It transforms the damage detection problem into a mathematical optimization problem, and then to solve the problem by some optimization algorithms [
20,
21]. Based on this theory, numerous optimization algorithms are employed to identify damage, which can usually locate and quantify damage accurately. Dinh-Cong et al. [
22] applied the Jaya algorithm to locate and quantify the damage for a two-dimensional frame, a planar truss, and a four-storey structure. Tran-Ngoc et al. [
23] used the cuckoo search (CS) algorithm to identify the damage of a steel beam. Gomes et al. [
24] adopted the sunflower optimization (SFO) algorithm to identify damage of the composite laminated plates. In addition, a series of creative ideas were developed to improve or enhance the basic algorithms, which can get a better optimization result. Wei et al. [
25] introduced a disturbance in the evolution process to propose an improved particle swarm optimization (IPSO), and identified the damage of a beam, a truss, and a plate. Huang et al. [
26] imported the Euclidean distance into the position updating formula to present the enhanced moth–flame optimization (EMFO) for SDI. Three numerical examples and two laboratory examples were applied to verify the proposed method. Ding et al. [
27] introduced a new search mode and the Gaussian search mode to the exploration and exploitation stages of the artificial bee colony algorithm, respectively. Then, a truss, a cantilevered plate, and a cracked beam are employed to verify the efficiency of the proposed modified artificial bee colony (MABC) algorithm. Although those optimization algorithms can detect the location and severity of the damage, the computational costs are extremely high. As the search space increases, the complexity increases sharply, especially when those optimization algorithms are applied to large-scale structures with numerous degrees of freedom, the iterative analysis will be complex and time-consuming.
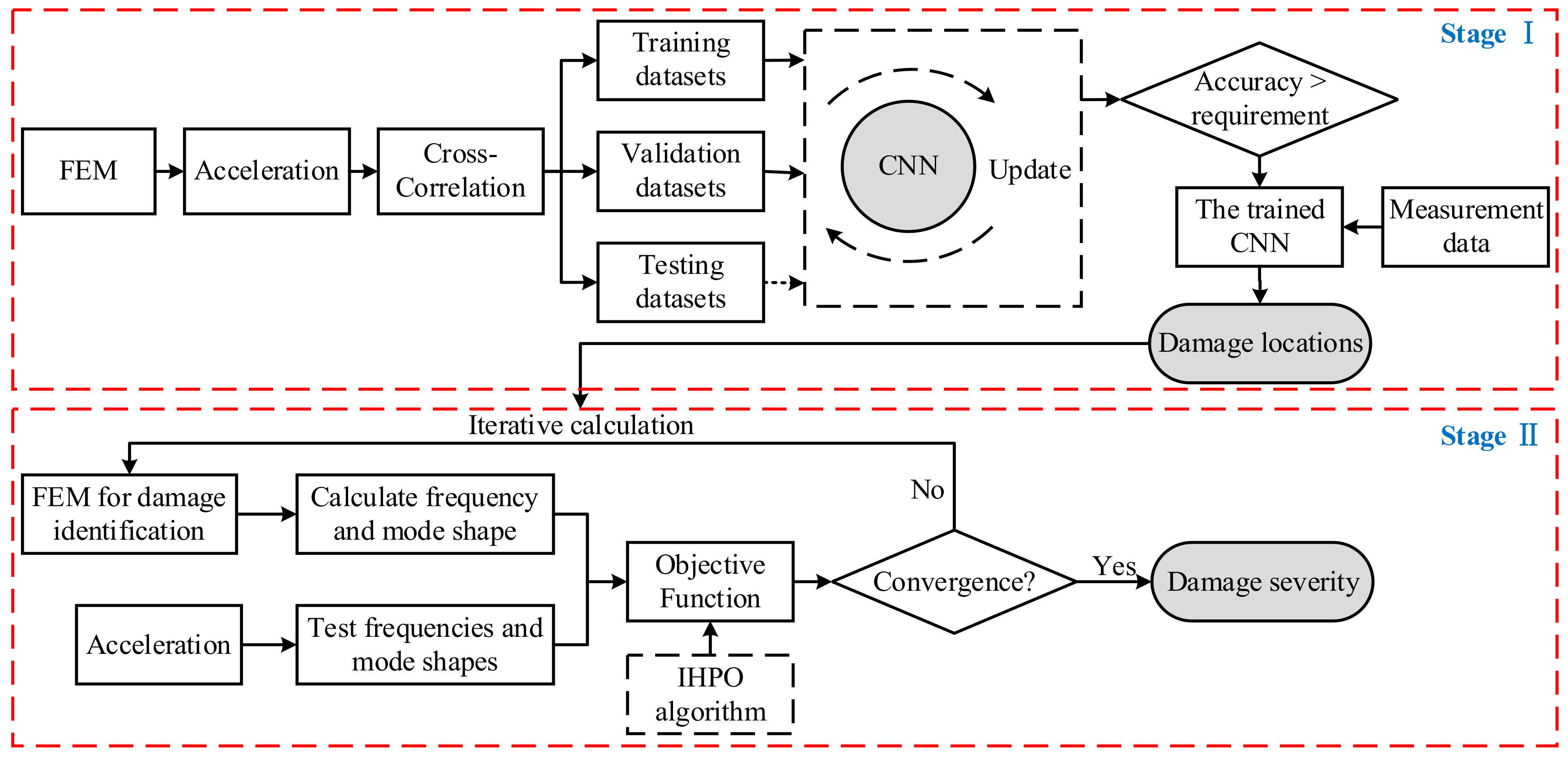
Therefore, in order to locate damage and quantify its severity accurately, as well as save computational costs effectively, it is promising to combine data-based methods and model-based methods. In addition, the hunter–prey optimization (HPO) algorithm is an effective intelligent optimization algorithm, which has the advantages of a fast convergence speed and a strong optimization ability and has great potential for structural damage identification. Based on the above-mentioned consideration, in this paper, a new two-stage damage identification approach based on CNN and an improved hunter–prey optimization (IHPO) algorithm has been first proposed. In the first stage, the cross-correlation-based damage localization index (CCBLI) is extracted from the acceleration responses, and then the CCBLI is input into CNN to locate structural damage. In the second stage, the IHPO algorithm is applied to optimize the objective function, and then to quantify the damage severity. A numerical example of the ASCE benchmark frame and a test structure of a three-storey frame with different damage cases are employed to investigate its accuracy and efficiency.
The remainder of this paper is organized as follows. In
Section 2, firstly, the basic theories of cross-correlation and a CNN, which is combined with the CCBLI to locate structural damage, are presented. Secondly, the HPO algorithm and objective function are described in detail. At the same time, in order to improve the global optimization ability of the HPO algorithm, the tent chaos mapping, Cauchy distribution, and linear combination are adopted to modify it, and the IHPO algorithm is proposed. Then, the IHPO algorithm is employed to quantify the damage severity. In
Section 3, a numerical example of the ASCE benchmark frame is applied to verify the feasibility of the proposed method. In
Section 4, a test structure of a three-storey frame is employed to validate the applicability of the proposed approach. In
Section 5, some conclusions of this paper are summarized.
4. Experiment Validation
In this section, a three-storey frame structure [
41], as shown in
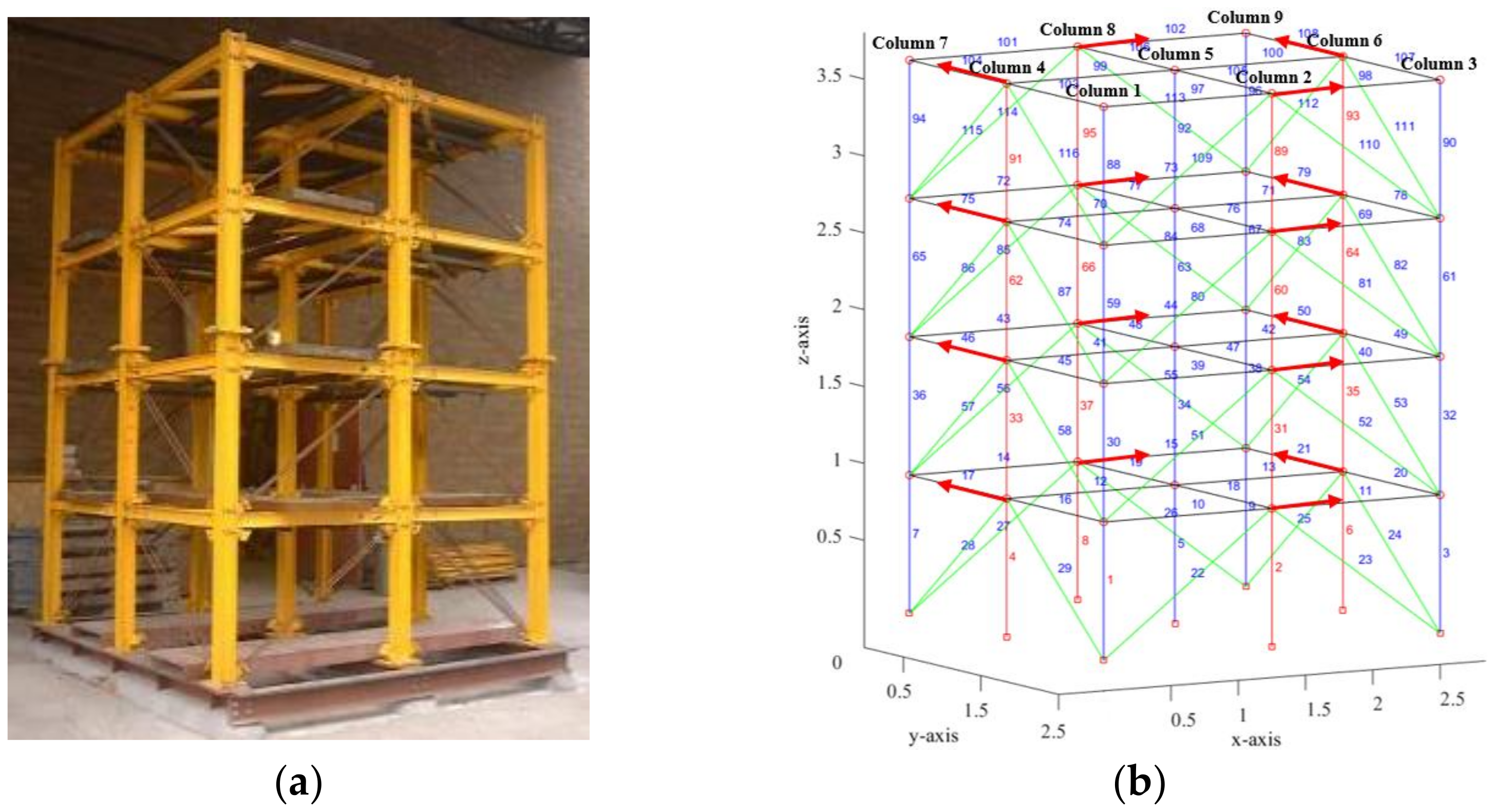
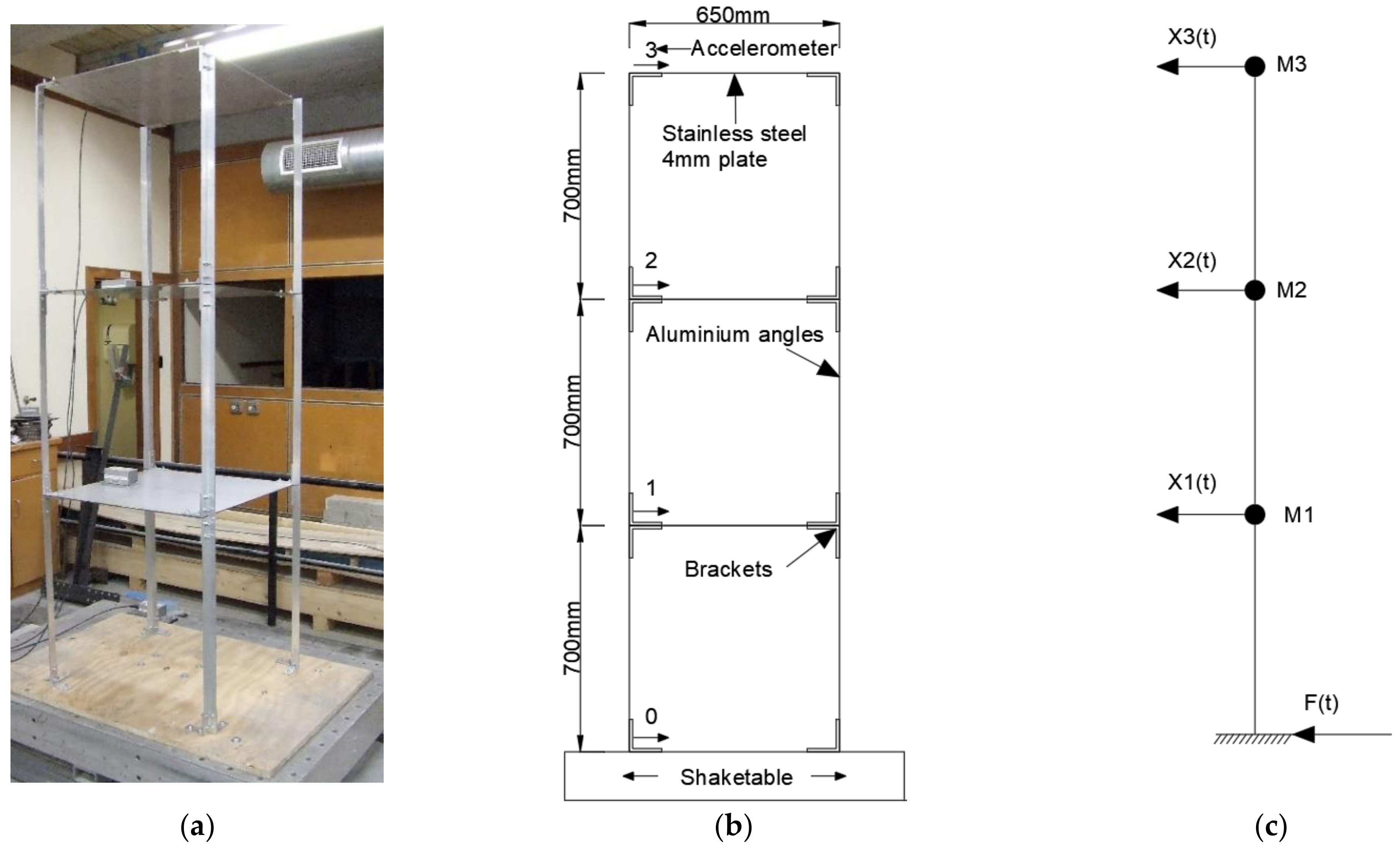
Figure 10, is adopted to further validate the effectiveness of the proposed approach. The structure consists of aluminum angle columns and stainless-steel floor plates, which are connected by bolted aluminum brackets. The lateral stiffness of each floor can be changed independently without permanently damaging the structure, which is achieved by easily replacing the columns with brackets. The thickness and size of the stainless-steel plates are 4.0 mm and 650 mm × 650 mm, respectively. The size and thickness of the equal angle columns are 30 mm × 30 mm and 4.5 mm. The column height of each floor is 0.7 m, and its ends are fixed on aluminum brackets with two bolts. The width and thickness of the bracket are 30 mm and 4.5 mm, respectively, and each bracket is fixed on the plate with two 6.0 mm bolts. The structure is mounted on 20 mm plywood and fixed on the vibration table with 10 mm bolts. Damage is introduced by replacing the original 4.5 mm thick column of a specific floor with a thinner 3.0 mm aluminum angle. The structural states are summarized in
Table 6.
The structure is equipped with four 2.5 V/g uniaxial accelerometers, one for measuring table acceleration and the other for each floor, as shown in
Figure 10. The acceleration in the direction of ground motion was measured at the sampling rate of 400 Hz. MATLAB was used to filter the data. The original signal was decreased from 400 Hz to 100 Hz. The detail of the sensors’ layout, test equipment, and test process can be referred to the Ref. [
41].
4.1. The Updated Finite Element Model
In this paper, the test structure is simulated as three lumped masses by MATLAB, including beams connecting each lumped mass, as shown in
Figure 10. The Young’s modulus and the density of aluminum are 71.7 GPa and 2700 kg/m
3, respectively. Then, the IHPO algorithm is utilized for model updating based on the natural frequencies and mode shapes under the intact state. The updating results about frequencies and MACs of the experimental and numerical models are presented in
Table 7.
It can be seen that the errors between the updated frequencies and the measured ones are greatly reduced. The max error is only 0.05%, and the MACs are all greater than 0.99, which indicates that the updated FEM and experimental model have a good correlation. Therefore, the datasets generated from the updated FEM can be used for training the proposed CNN network, and the measured data collected from the laboratory tests are applied to identify damage.
4.2. Damage Localization
4.2.1. Data Generation for Training
Similarly, damage is introduced by reducing the elements stiffness. The maximum number of damaged elements is two. So, there are three damage locations for single-site and double-site damage cases. Each damage location is calculated 2000 times. The range of stiffness reduction is random and has uniform distribution within [0, 0.15], and 6000 datasets are collected for each damage case. Based on the updated FEM, the x-direction impact force is applied at the vibration table, as shown in
Figure 10, to obtain the acceleration responses. Meanwhile, the sampling frequency and time are the same as the experimental. Then, the CCBLI can be obtained.
Accordingly, input the CCBLI with 3 × 3 to the CNN for feature learning and output the stiffness reduction vector with 3 × 1. In addition, the data split ratio, network architecture, and hyperparameters applied to train the network are the same as in
Section 3.1.
4.2.2. Damage Localization Results
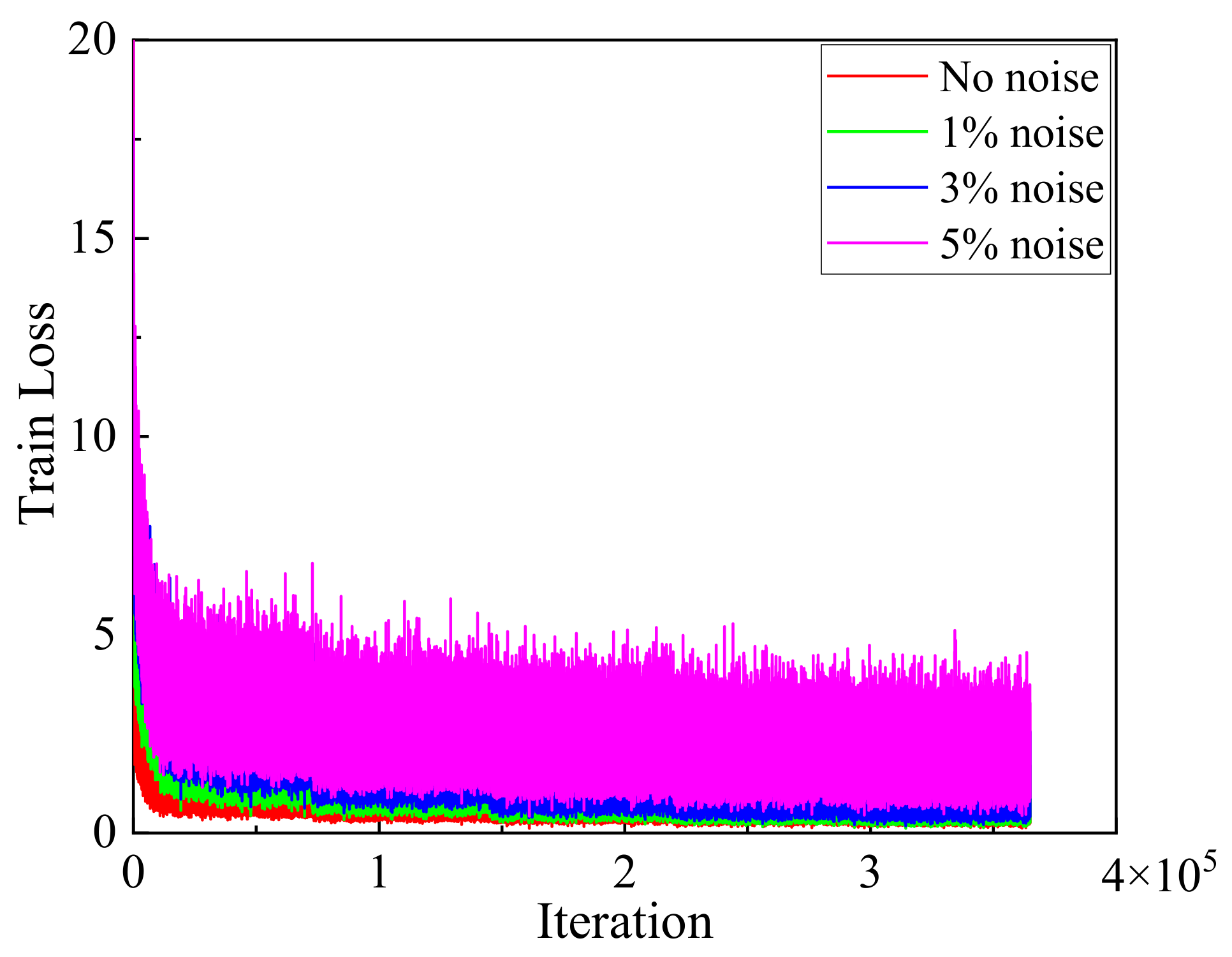
Figure 11 shows the training loss curve. It can be observed that the curve has a good convergence performance, and the ultimate validation loss is 0.685. Additionally, the trained model shows good performance with the MSE (0.046) and R value (0.947). These results indicate that the trained model has great potential for accurate SDL.
Furthermore, three damage cases in the laboratory test, i.e., State 1, 2, and 3, as shown in
Table 8, are used to test the proposed approach. The corresponding CCBLI is input to the trained CNN to locate the damage. The results are shown in
Table 8. It is shown that the proposed approach can accurately locate the single-site and multiple-site damage.
4.3. Damage Quantification
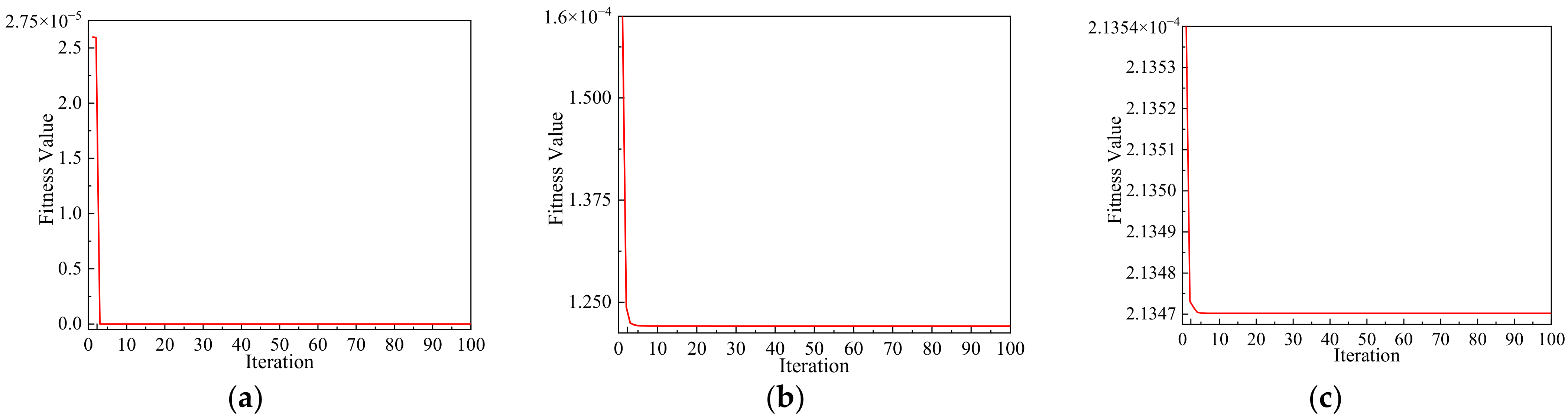
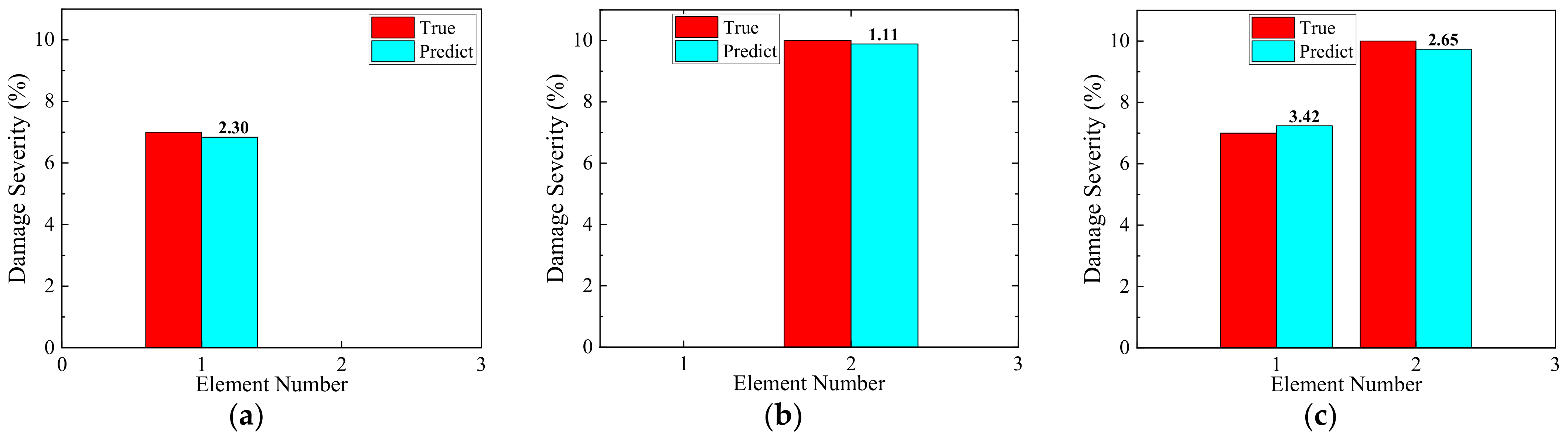
Next, based on the damage localization results obtained from the first stage, there are only 1, 1, and 2 variables for State 1, 2 and 3, respectively. Then, the first four modes are employed to solve the optimization problem in the second stage. For this progress, the parameters are the same as in
Section 3.2. The iterative curves are presented in
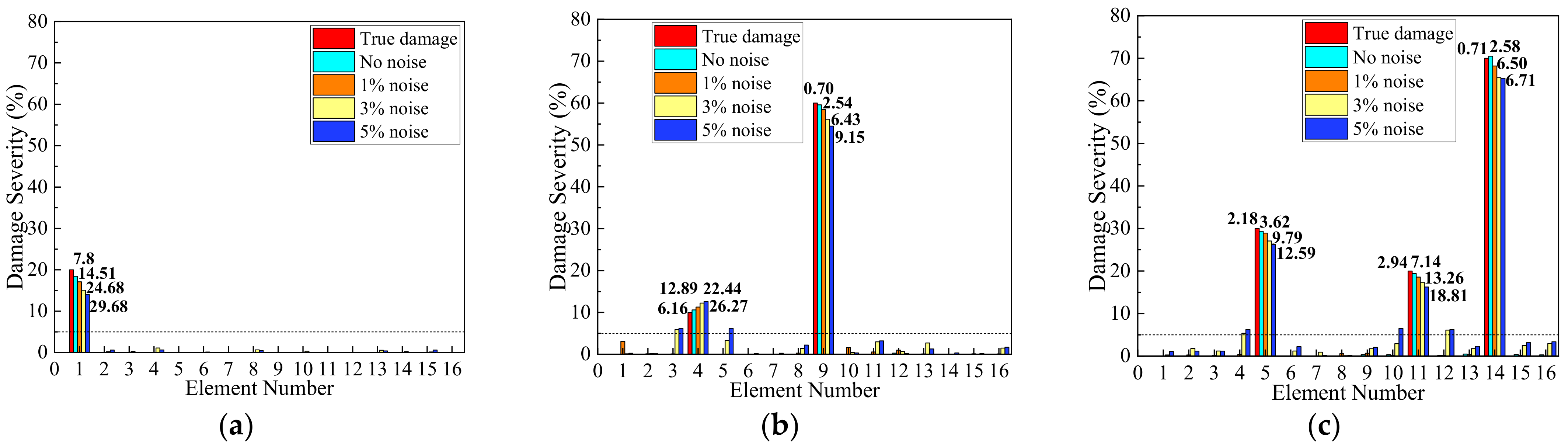
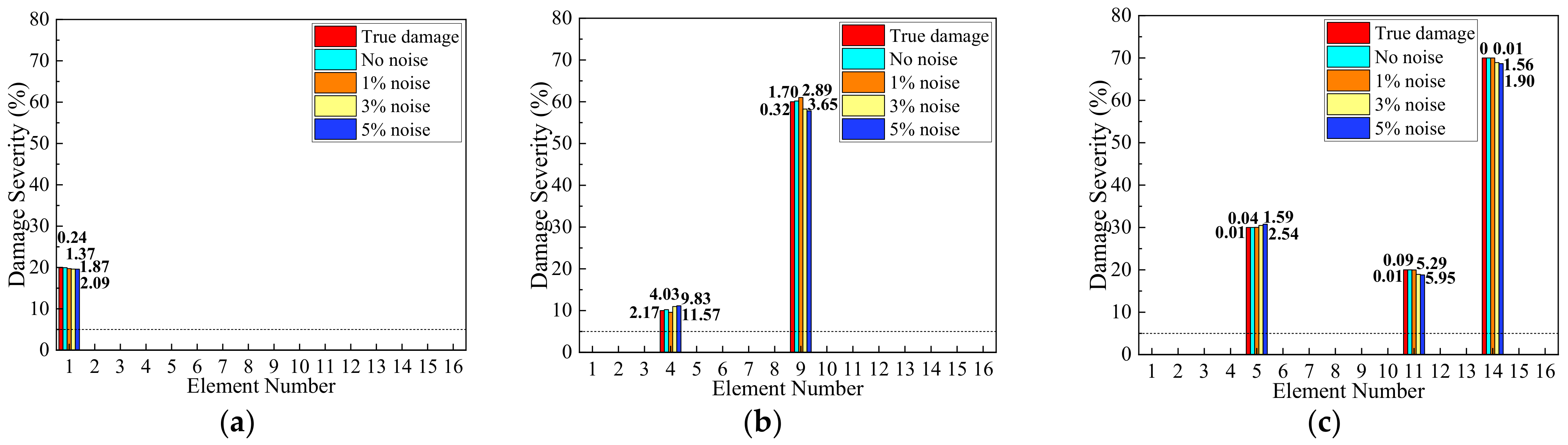
Figure 12. The average damage identification results and the corresponding errors are illustrated in
Figure 13.
It can be observed that the IHPO algorithm performs with a fast convergence speed and a high convergence accuracy. The actual damage quantification can be detected successfully in all damage cases, and the identification errors are less than 4%. In summary, the experimental verification of the three damage cases illustrates that the proposed method can be applied to the practical application of SDI with sufficient accuracy.

 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}