
Inerter Location-Based Vibration Suppression Study of a Transmission Line Equipped with Tuned-Mass-Damper-Inerter (TMDI) under Harmonic Excitation



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
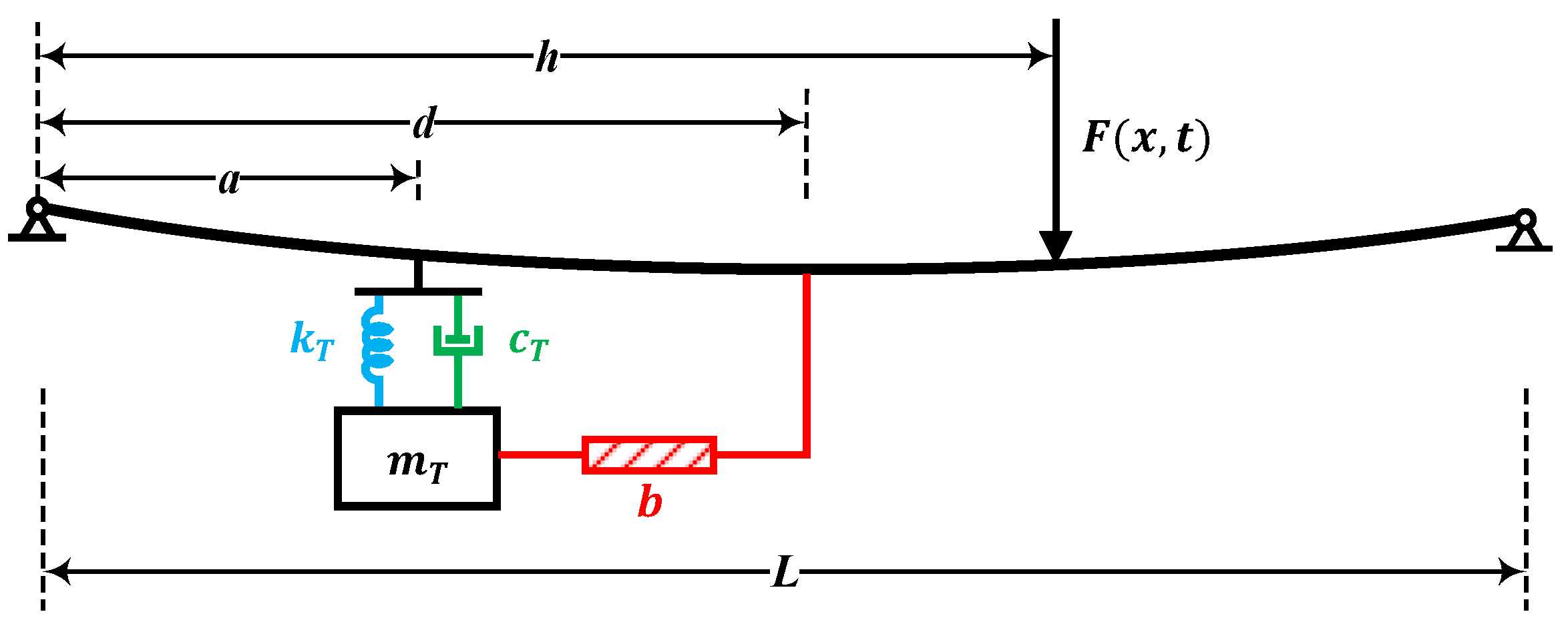
2. Dynamics Model
2.1. Differential Equations of Motion
2.2. Displacement Response Spectrum
3. Vibration Control Performance Evaluation
3.1. Parameter Optimization of TMDI
3.2. Vibration Control Performance Evaluation of TMDI
3.3. Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gabbai, R.; Benaroya, H. An overview of modeling and experiments of vortex-induced vibration of circular cylinders. J. Sound Vib. 2005, 282, 575–616. [Google Scholar] [CrossRef]
- Williamson, C.; Govardhan, R. A brief review of recent results in vortex-induced vibrations. J. Wind Eng. Ind. Aerodyn. 2008, 96, 713–735. [Google Scholar] [CrossRef]
- Wu, X.; Ge, F.; Hong, Y. A review of recent studies on vortex-induced vibrations of long slender cylinders. J. Fluids Struct. 2012, 28, 292–308. [Google Scholar] [CrossRef] [Green Version]
- Mannini, C.; Marra, A.; Bartoli, G. VIV–galloping instability of rectangular cylinders: Review and new experiments. J. Wind Eng. Ind. Aerodyn. 2014, 132, 109–124. [Google Scholar] [CrossRef]
- Chen, Z.; Tse, K.T.; Kwok, K.C.S.; Kareem, A.; Kim, B. Measurement of unsteady aerodynamic force on a galloping prism in a turbulent flow: A hybrid aeroelastic-pressure balance. J. Fluids Struct. 2021, 102, 103232. [Google Scholar] [CrossRef]
- Zhou, L.; Yan, B.; Zhang, L.; Zhou, S. Study on galloping behavior of iced eight bundle conductor transmission lines. J. Sound Vib. 2016, 362, 85–110. [Google Scholar] [CrossRef]
- Diana, G.; Belloli, M.; Giappino, S.; Manenti, A.; Mazzola, L.; Muggiasca, S.; Zuin, A. Wind Tunnel Tests on Two Cylinders to Measure Subspan Oscillation Aerodynamic Forces. IEEE Trans. Power Deliv. 2014, 29, 1273–1283. [Google Scholar] [CrossRef]
- Diana, G.; Belloli, M.; Giappino, S.; Manenti, A.; Mazzola, L.; Muggiasca, S.; Zuin, A. A Numerical Approach to Reproduce Subspan Oscillations and Comparison with Experimental Data. IEEE Trans. Power Deliv. 2014, 29, 1311–1317. [Google Scholar] [CrossRef]
- Hori, Y.; Okuyama, K. Axial Vibration Analysis of Transformer Windings Under Short Circuit Conditions. IEEE Trans. Power Appar. Syst. 1980, PAS-99, 443–451. [Google Scholar] [CrossRef]
- Bungay, E.; Mcallister, D. Electric Cables Handbook; CRC Press: Boca Raton, FL, USA, 1990. [Google Scholar]
- Zhang, M.; Song, Y.; Abdelkefi, A.; Yu, H.; Wang, J. Vortex-induced vibration of a circular cylinder with nonlinear stiffness: Prediction using forced vibration data. Nonlinear Dyn. 2022, 108, 1867–1884. [Google Scholar] [CrossRef]
- Liu, G.; Li, H.; Qiu, Z.; Leng, D.; Li, Z.; Li, W. A mini review of recent progress on vortex-induced vibrations of marine risers. Ocean Eng. 2020, 195, 106704. [Google Scholar] [CrossRef]
- Jafari, M.; Hou, F.; Abdelkefi, A. Wind-induced vibration of structural cables. Nonlinear Dyn. 2020, 100, 351–421. [Google Scholar] [CrossRef]
- Xu, F.; Yu, H. Effect of Ice Accretion on the Aerodynamic Responses of a Pipeline Suspension Bridge. J. Bridg. Eng. 2020, 25, 04020091. [Google Scholar] [CrossRef]
- Weaver, D.; Fitzpatrick, J. A review of cross-flow induced vibrations in heat exchanger tube arrays. J. Fluids Struct. 1988, 2, 73–93. [Google Scholar] [CrossRef]
- Zhang, M.; Xu, F. Tuned mass damper for self-excited vibration control: Optimization involving nonlinear aeroelastic effect. J. Wind. Eng. Ind. Aerodyn. 2022, 220, 104836. [Google Scholar] [CrossRef]
- Zucca, M.; Longarini, N.; Simoncelli, M.; Aly, A.M. Tuned Mass Damper Design for Slender Masonry Structures: A Framework for Linear and Nonlinear Analysis. Appl. Sci. 2021, 11, 3425. [Google Scholar] [CrossRef]
- Stockbridge, G.H. Vibration Damper. U.S. Patent 1,675,391, 3 July 1928. [Google Scholar]
- Claren, R.; Diana, G. Mathematical analysis of transmission line vibration. IEEE Trans. Power Appar. Syst. 1969, PAS-88, 1741–1771. [Google Scholar] [CrossRef]
- Wagner, H.; Ramamurti, V.; Sastry, R.; Hartmann, K. Dynamics of Stockbridge dampers. J. Sound Vib. 1973, 30, 207–220. [Google Scholar] [CrossRef]
- Leblond, A.; Hardy, C. On the estimation of a 2 × 2 complex stiffness matrix of symmetric Stockbridge-type dampers. In Proceedings of the 3rd International Symposium on Cable Dynamics, Trondheim, Norway, 10 August 1999. [Google Scholar]
- Luo, X.; Wang, L.; Zhang, Y. Nonlinear numerical model with contact for Stockbridge vibration damper and experimental validation. J. Vib. Control 2014, 22, 1217–1227. [Google Scholar] [CrossRef]
- Vaja, N.K.; Barry, O.; DeJong, B. Finite element modeling of Stockbridge damper and vibration analysis: Equivalent cable stiffness. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference—ASME, Cleveland, OH, USA, 6–9 August 2017. [Google Scholar] [CrossRef] [Green Version]
- Richardson, A.S. Vibration damping required for overhead lines. IEEE Trans. Power Deliv. 1995, 10, 934–940. [Google Scholar] [CrossRef]
- Vecchiarelli, J.; Currie, I.; Havard, D. Computational analysis of aeolian conductor vibration with a Stockbridge-type damper. J. Fluids Struct. 2000, 14, 489–509. [Google Scholar] [CrossRef]
- Zhang, B.; Gong, W.S.; Wang, Z.H.; Zhang, M.G.; Han, L.; Zhang, Y. Study on equivalent viscous damping of aeolian vibration for transmission line by AACSR-400 steel core aluminum alloy wire. Key Eng. Mater. 2016, 723, 94–99. [Google Scholar] [CrossRef]
- Smith, M. Synthesis of mechanical networks: The inerter. IEEE Trans. Autom. Control 2002, 47, 1648–1662. [Google Scholar] [CrossRef] [Green Version]
- Marian, L.; Giaralis, A. Optimal design of a novel tuned mass-damper–inerter (TMDI) passive vibration control configuration for stochastically support-excited structural systems. Probabilistic Eng. Mech. 2014, 38, 156–164. [Google Scholar] [CrossRef]
- Pan, C.; Zhang, R. Design of structure with inerter system based on stochastic response mitigation ratio. Struct. Control Heal. Monit. 2018, 25, e2169. [Google Scholar] [CrossRef]
- Giaralis, A.; Petrini, F. Wind-Induced Vibration Mitigation in Tall Buildings Using the Tuned Mass-Damper-Inerter. J. Struct. Eng. 2017, 143, 04017127. [Google Scholar] [CrossRef]
- Petrini, F.; Giaralis, A.; Wang, Z. Optimal tuned mass-damper-inerter (TMDI) design in wind-excited tall buildings for occupants’ comfort serviceability performance and energy harvesting. Eng. Struct. 2020, 204, 109904. [Google Scholar] [CrossRef]
- Wang, Q.; Qiao, H.; De Domenico, D.; Zhu, Z.; Xie, Z. Wind-Induced Response Control of High-Rise Buildings Using Inerter-Based Vibration Absorbers. Appl. Sci. 2019, 9, 5045. [Google Scholar] [CrossRef]
- Su, N.; Xia, Y.; Peng, S. Filter-based inerter location dependence analysis approach of Tuned mass damper inerter (TMDI) and optimal design. Eng. Struct. 2022, 250, 113459. [Google Scholar] [CrossRef]
- Dai, J.; Xu, Z.-D.; Gai, P.-P. Tuned mass-damper-inerter control of wind-induced vibration of flexible structures based on inerter location. Eng. Struct. 2019, 199, 109585. [Google Scholar] [CrossRef]
- Zhang, Z.; Fitzgerald, B. Tuned mass-damper-inerter (TMDI) for suppressing edgewise vibrations of wind turbine blades. Eng. Struct. 2020, 221, 110928. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. An enhanced base isolation system equipped with optimal tuned mass damper inerter (TMDI). Earthq. Eng. Struct. Dyn. 2018, 47, 1169–1192. [Google Scholar] [CrossRef]
- Den Hartog, J.P. Mechanical Vibrations; Courier Corporation: Chelmsford, MA, USA, 1985. [Google Scholar]
- Wang, Z.; Giaralis, A. Enhanced motion control performance of the tuned mass damper inerter (TMDI) through primary structure shaping. Struct. Control Heal. Monit. 2021, 28, e2756. [Google Scholar] [CrossRef]
- Kaveh, A.; Mahdavi, V. Colliding bodies optimization: A novel meta-heuristic method. Comput. Struct. 2014, 139, 18–27. [Google Scholar] [CrossRef]
- Kaveh, A.; Farzam, M.F.; Jalali, H.H.; Maroofiazar, R. Robust optimum design of a tuned mass damper inerter. Acta Mech. 2020, 231, 3871–3896. [Google Scholar] [CrossRef]
- Zhou, S.; Jean-Mistral, C.; Chesne, S. Influence of inerters on the vibration control effect of series double tuned mass dampers: Two layouts and analytical study. Struct. Control Health Monit. 2019, 26, e2414. [Google Scholar] [CrossRef]
- Li, J.; Zhang, H.; Chen, S.; Zhu, D. Optimization and sensitivity of TMD parameters for mitigating bridge maximum vibration response under moving forces. Structures 2020, 28, 512–520. [Google Scholar] [CrossRef]
- Wang, Z.; Li, H.-N.; Song, G. Aeolian vibration control of power transmission line using Stockbridge type dampers—A review. Int. J. Struct. Stab. Dyn. 2021, 21, 2130001. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Yang, Y.; Sun, Y.; Zhong, Y.; Zhou, L. Inerter Location-Based Vibration Suppression Study of a Transmission Line Equipped with Tuned-Mass-Damper-Inerter (TMDI) under Harmonic Excitation. Buildings 2022, 12, 657. https://doi.org/10.3390/buildings12050657
Liu X, Yang Y, Sun Y, Zhong Y, Zhou L. Inerter Location-Based Vibration Suppression Study of a Transmission Line Equipped with Tuned-Mass-Damper-Inerter (TMDI) under Harmonic Excitation. Buildings. 2022; 12(5):657. https://doi.org/10.3390/buildings12050657
Chicago/Turabian StyleLiu, Xinpeng, Yingwen Yang, Yi Sun, Yongli Zhong, and Lei Zhou. 2022. "Inerter Location-Based Vibration Suppression Study of a Transmission Line Equipped with Tuned-Mass-Damper-Inerter (TMDI) under Harmonic Excitation" Buildings 12, no. 5: 657. https://doi.org/10.3390/buildings12050657