1. Introduction
Ansys LS-DYNA finite element (FE) code provides more than ten internal constitutive models specially developed for concrete material simulation. Among them you can find such models of concrete as Holmquist–Johnson–Cook (HJC), Riedel–Hiermaier–Thoma (RHT), Karagozian&Case concrete (KCC) and Continuous Surface Cap Model (CSCM). The descriptions of the theory behind these models could be found in software user manuals [
1] and publications of many applied researchers [
2,
3,
4,
5].
The CSCM (Continuous Surface Cap Model) [
6,
7] model, considered in this paper, is based on Frank L. DiMaggio’s work [
8], published in 1971. The current CSCM model implementation in LS-DYNA is calibrated according to CEB-FIP 1990 Model Code [
9]. The material model is developed at the request of the Federal Highway Administration of the U.S. Department of Transportation.
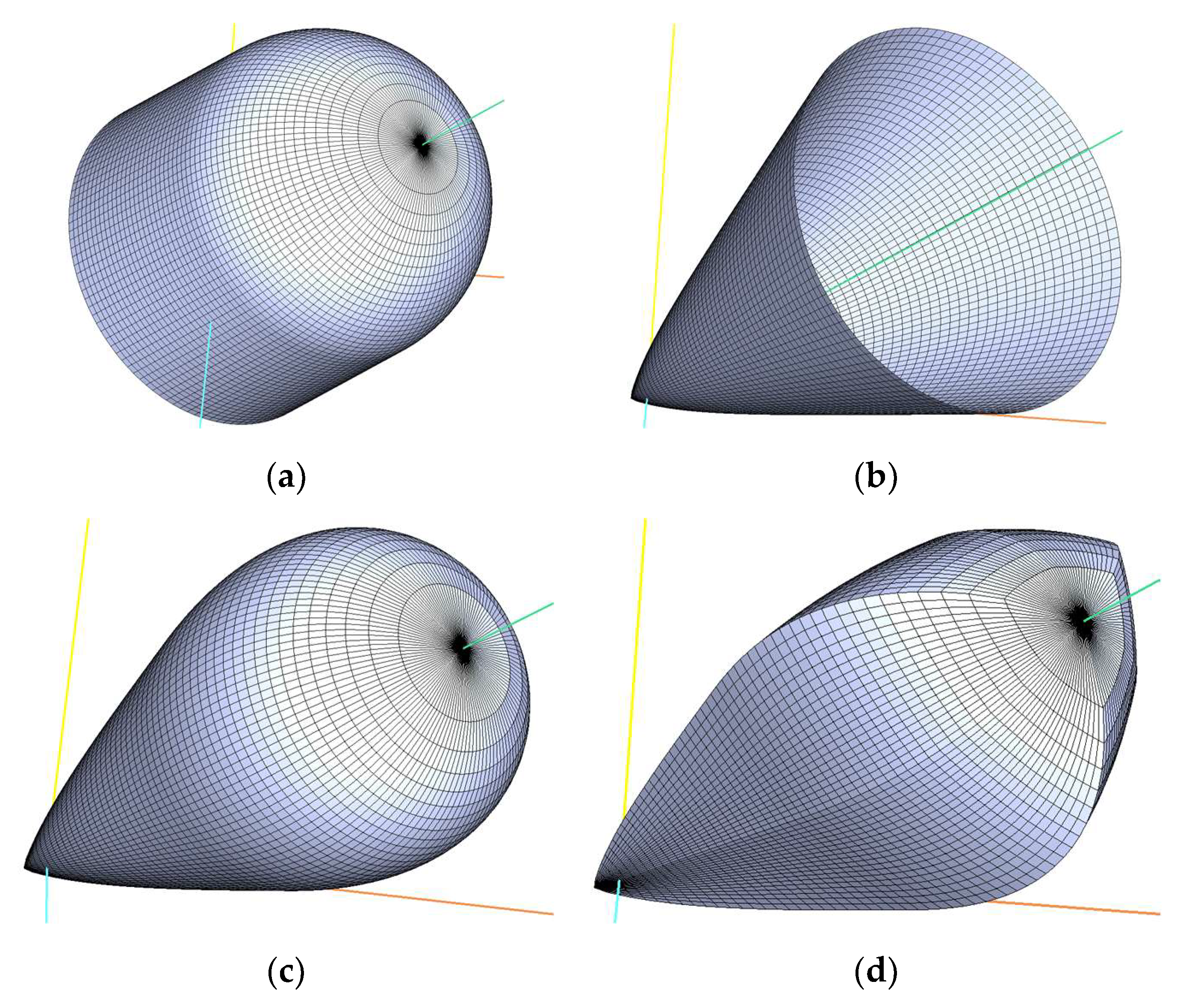
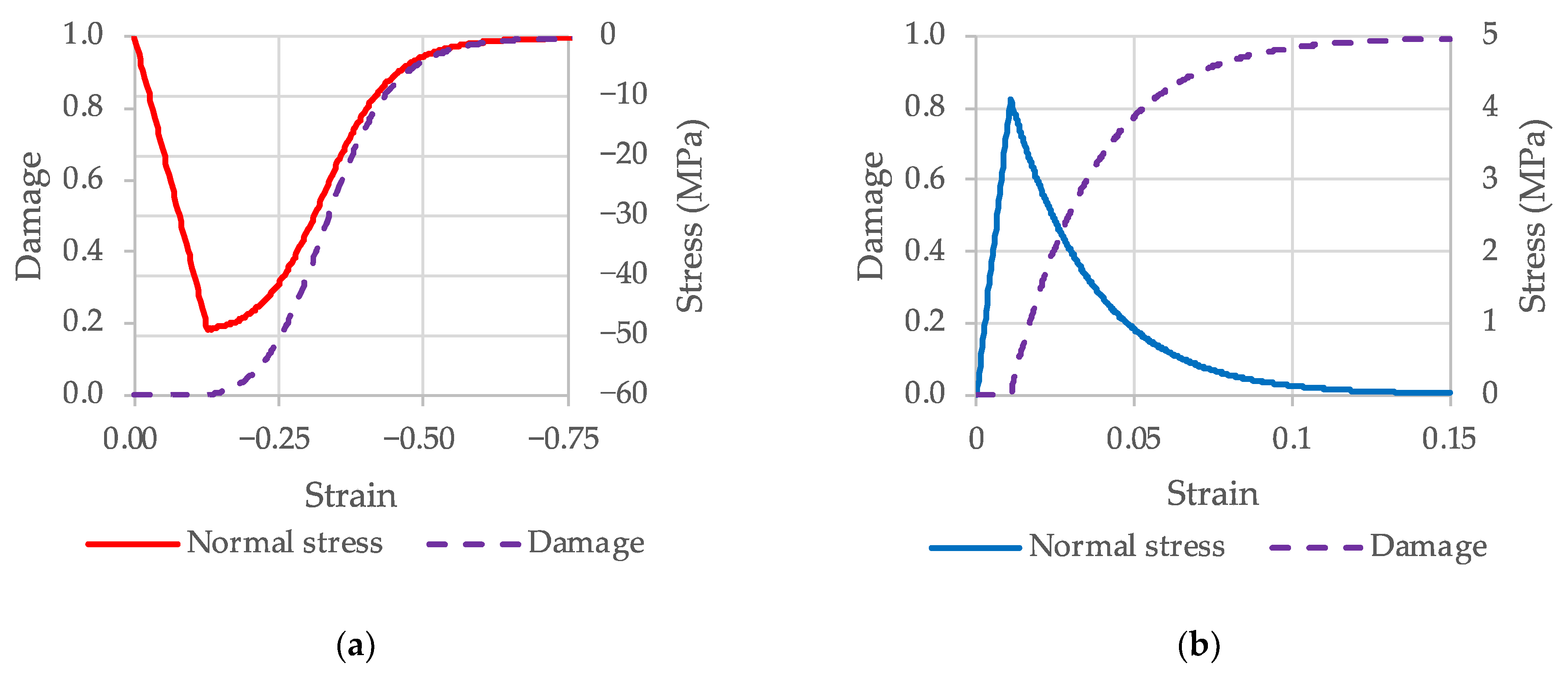
The CSCM model implementation in LS-DYNA has numerous essential features that simulate concrete material mechanics with a high level of accuracy. The model uses isotropic constitutive equations and three stress-invariant strength surfaces with translation for pre-peak hardening, and a hardening cap that expands and contracts. Independent tensile (brittle) and compressive (ductile) damage-based softening tracking allows simulating virtual crack closings in compressive stress or strain states. The rate effects for high strain rate applications influence material strength and fracture energy release estimation. The model has a built-in energy regularization mechanism that reduces mesh sensitivity. Material erosion is supported for FE simulation of perforation and scabbing; the model also supports meshless particle discretization methods, such as Smoothed Patrice Hydrodynamics (SPH) and Smoothed Patrice Galerkin (SPG).
Moreover, the model has an easy input regime that activates an internal auto model calibration procedure. The model could automatically generate all material input paraments based on unconfined compressive strength and average aggregate size due to easy input regime. This capability is essential since it can simulate concrete objects on the design stage when no experimental data on material properties are available. This internal calibration works for concrete with unconfined strength is 20–58 MPa, but the best accuracy is achieved for the range of 28–48 MPa [
6]. The fracture energy calculation works correctly for a characteristic aggregate size range of 8–32 mm.
Due to all advantages mentioned above, the CSCM model has been widely used in simulations of concrete structures subjected to drop-weight impact [
10,
11,
12], projectile penetration [
13,
14,
15], progressive collapse [
16,
17,
18,
19,
20], vehicle collision [
21,
22,
23] and explosion [
24,
25,
26,
27].
Numerous studies have shown a good agreement between numerical results and experimental data. Bermejo et al. [
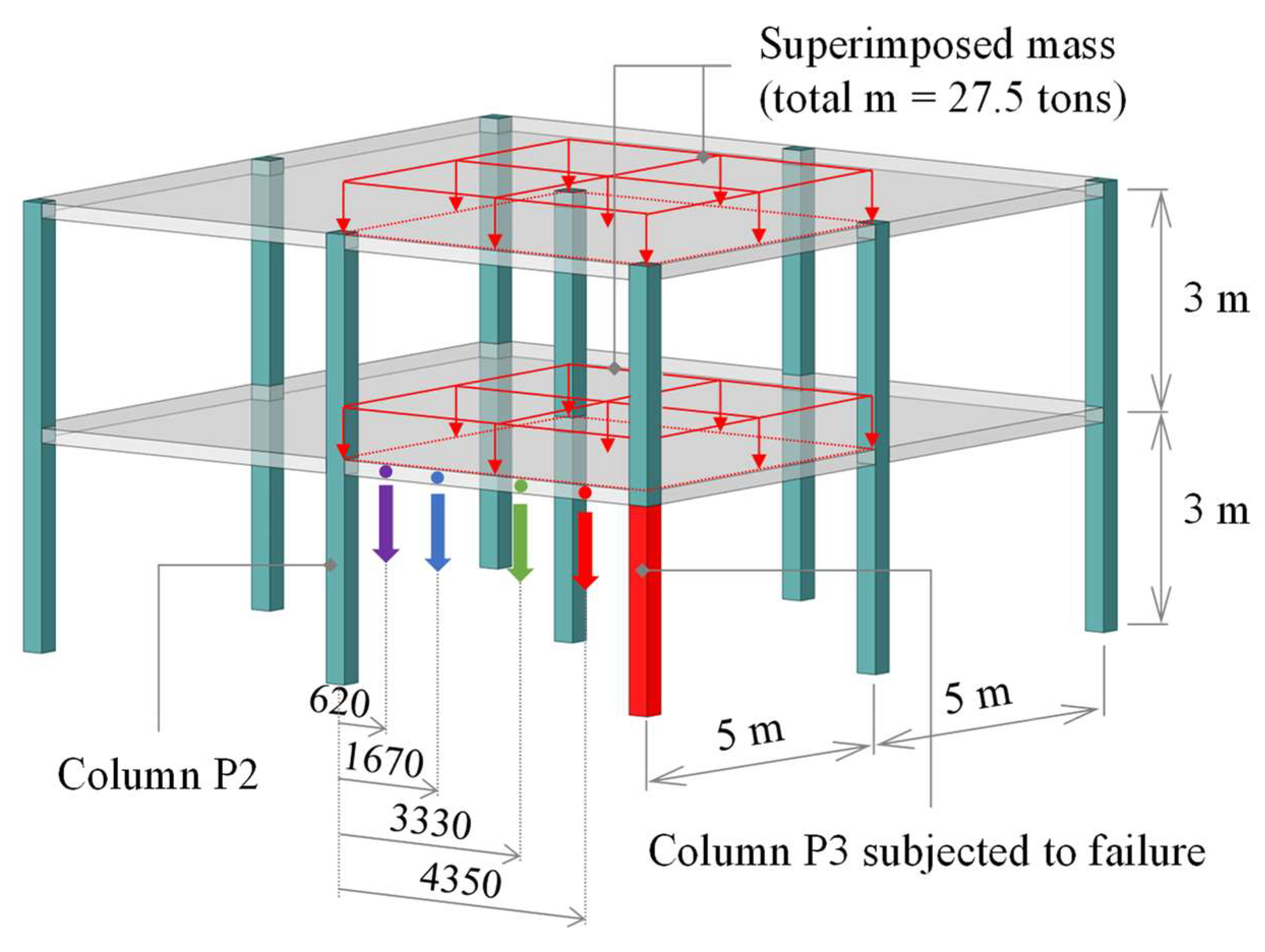
17] conducted an accurate scale test of a two-floor structure that loses a penultimate bearing column; a related numerical validation with the CSCM concrete model showed actual displacements and construction failure modes. Qian et al. [
28] found a good match of displacements, crack patterns, and a small mesh size dependency in the simulation of RC slab under a two-column loss scenario. Zhang et al. [
25] simulated the simply-supported reinforced concrete (RC) beams subjected to the combination of impact and blast loads and obtained correct vertical displacements, reaction forces and crack distribution. Yu et al. [
19] quasi-statically investigated the effect of masonry infill walls on the progressive collapse resistance of RC frames. Results obtained from numerical simulation and experiments agree in non-ultimate loading levels. Grunwald et al. [
29] simulated column loss for a two-dimensional frame structure under blast load and confirmed that the vertical displacement from the numerical model is in good agreement with test data, but crack patterns are not described correctly.
At the same time, many authors have noted an imperfect correlation with experiments when using default parameters of CSCM. Kim S.B. et al. [
10] used the auto-generated CSCM parameters to simulate the RC beams under drop weight loading conditions. They concluded that the strength is overvalued, and the vertical displacement is underestimated. Numerical models of missile impacts on RC plates developed by Chung et al. [
15] overestimated the residual displacements and rebound in bending impact tests and showed a more significant maximum displacement in a punching impact test.
Many authors have attempted to calibrate the model manually for a more accurate description of concrete structures subjected to dynamic actions. Levi-Hevroni et al. [
30] based experiments on the tension split Hopkinson bar, and suggested an increase in fracture energy and parameters governing the strain rate effects, since the numerical results did not correspond well with the test data. Yu et al. [
20] found that default model parameters caused stiffer and more significant resistance of RC beam-slab substructures under perimeter column loss. The reduction of elastic modulus and fracture energy allowed them to get a good match in cracking and displacements.
Thus, the CSCM model with automatically generated parameters can lead to incorrect simulation results for RC structures. As mentioned above, many researchers have attempted to calibrate the material model parameters more accurately. However, these studies are fragmentary, and to date there is no unified methodology for calibrating the CSCM model.
The object of the study in this paper is the concrete material model CSCM implemented in LS-DYNA as *MAT_CSCM(_CONCRETE)/*MAT_159 card. The goal of this research is to create a model calibration methodology and to validate the developed methodology on two problems of dynamic deformation of reinforced concrete with known experimental data: under low-velocity impact [
23] and under progressive collapse [
31].
The proposed procedure for model parameter identification and calibration is assumed that all input parameters will be identified on the material density, cylindrical strength, and fracture energy/characteristic aggregate size. Other input parameters are calculated based on a combination of the relations presented in [
6,
9,
32,
33]. A material model calibrated in this way should show more accurate compliance with strength standards [
32,
33] and work for a broader range of concrete strength classes.
4. Conclusions
The CSCM model has massive potential for concrete structures simulation under dynamic and static load. Since the automatic adjustment of model parameters in LS-DYNA leads to significant errors, this paper attempts to develop a methodology for calibrating model parameters for concretes of classes C20–C60, most commonly found in civil engineering. The proposed external calibration procedure can significantly improve the qualitative and quantitative description of concrete structure behavior.
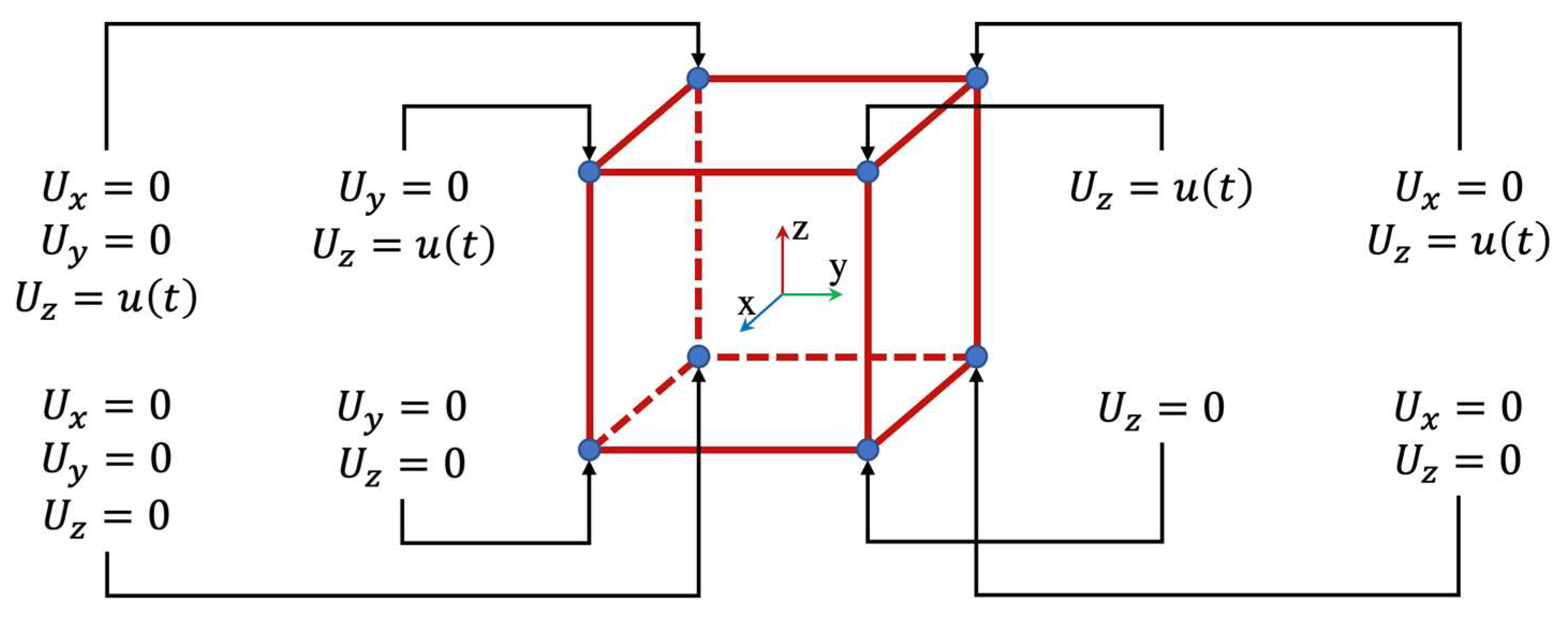
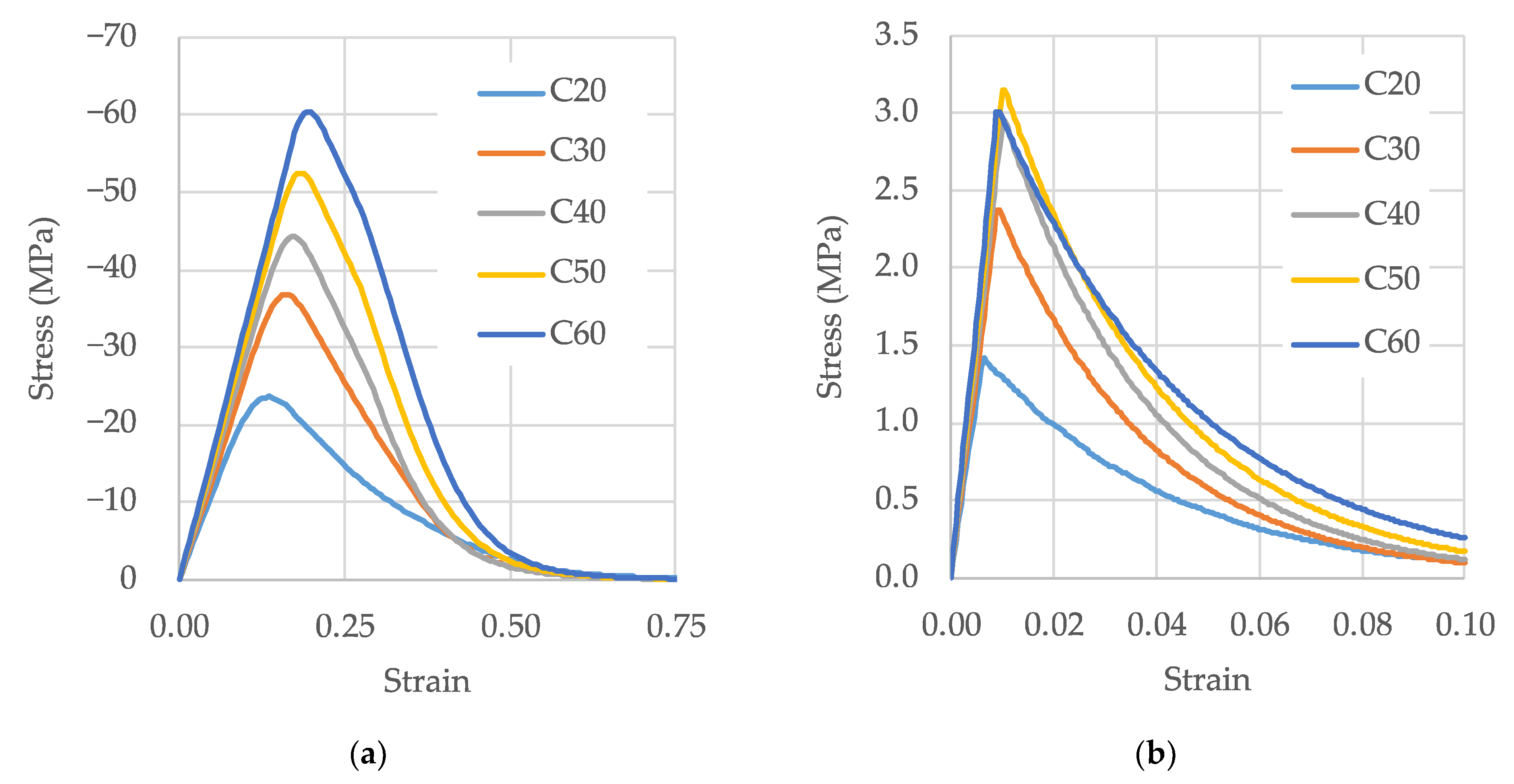
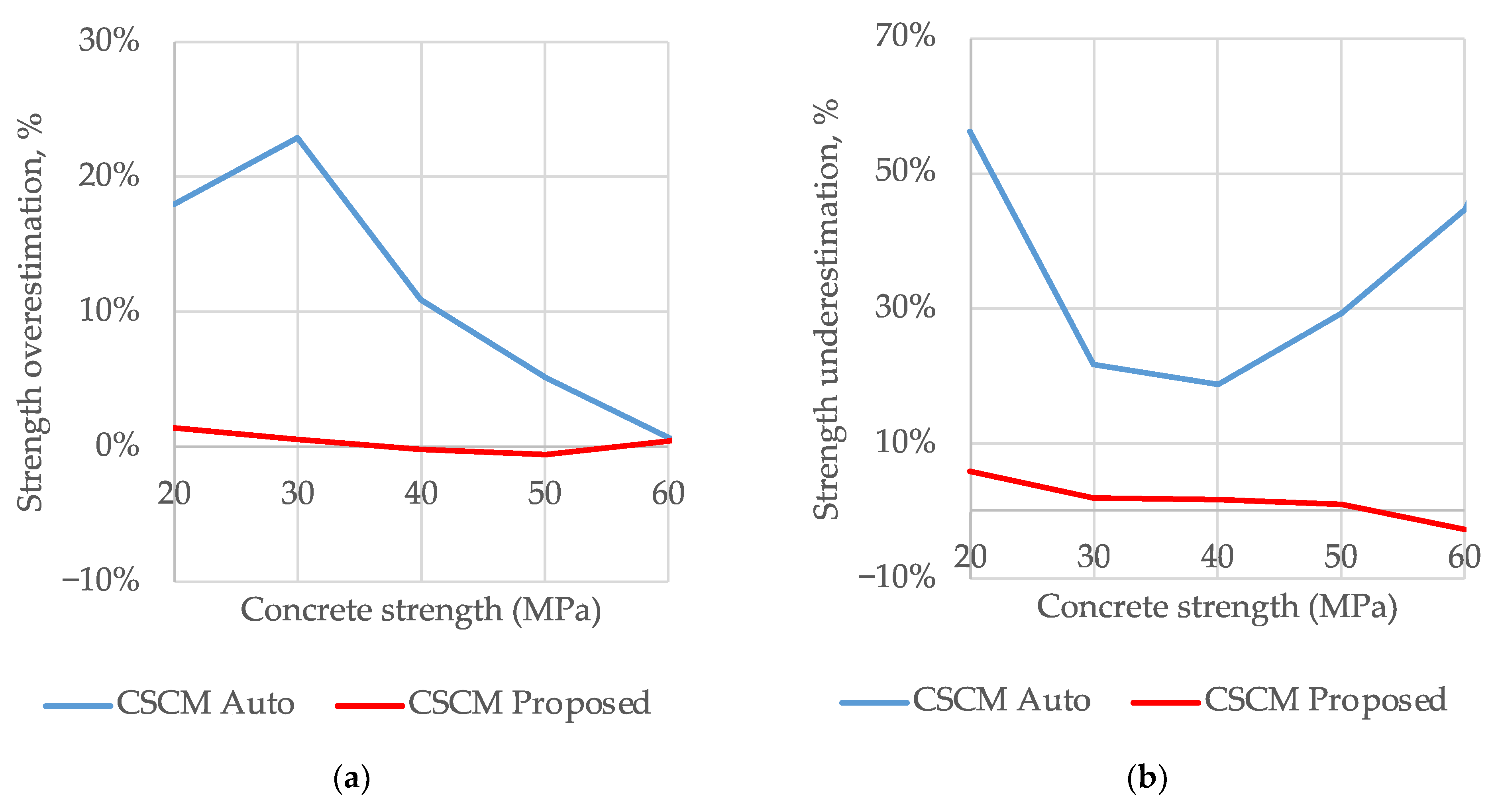
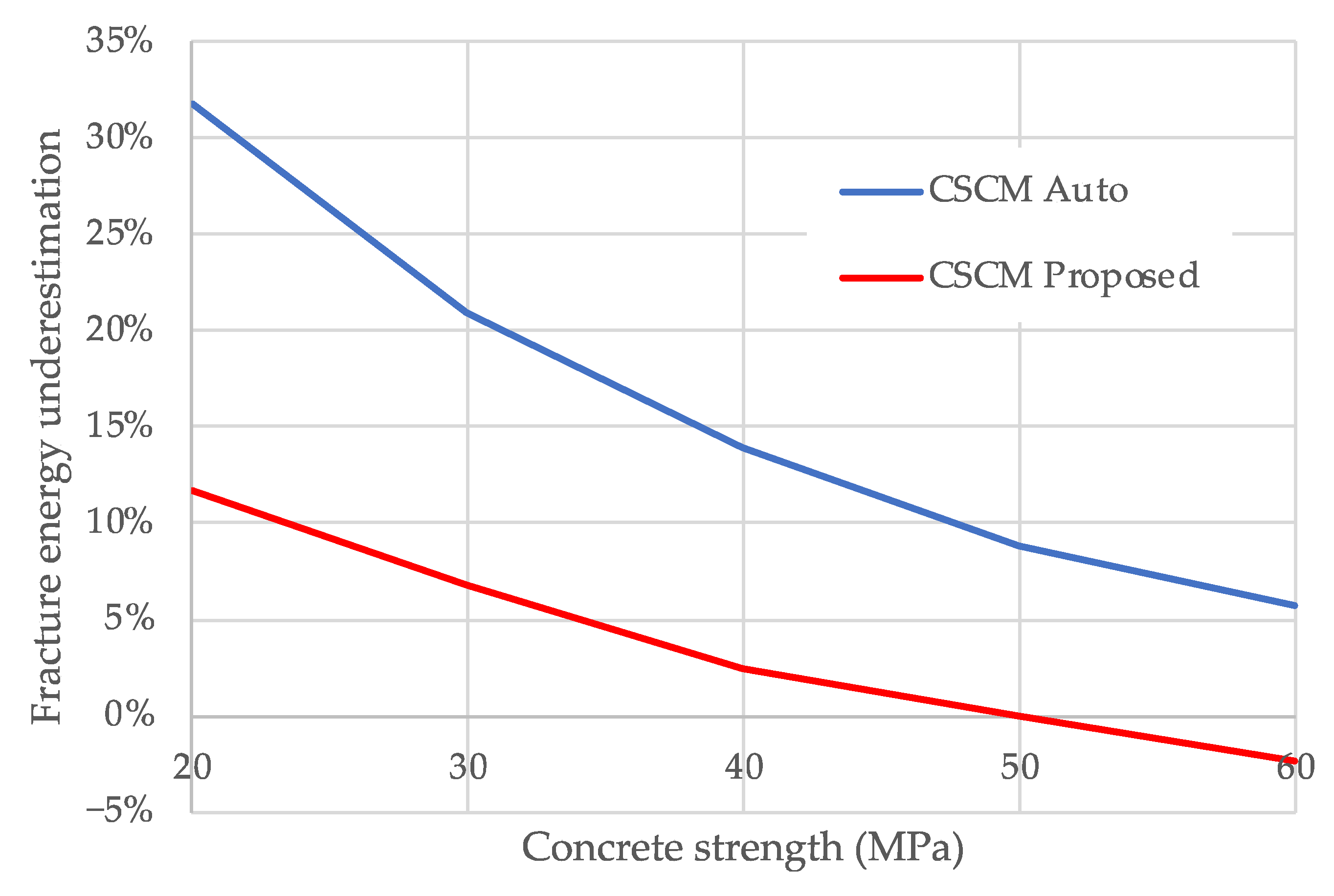
Single elements strength studies on default Automatic CSCM model calibration show an overestimation of compressive strength of up to 23.0% and an underestimation of tensile strength up to 56.2%. The fracture energy underestimation is up to 31.8%. The developed calibration procedure reduces these deviations 3.5–10 times: 5.4% on compressive strength, 5.8% on tensile strength and 11.7% on fracture energy.
Due to the lower tensile strength of concrete and low fracture energy, the default Auto CSCM model calibration dramatically underestimates the lifetime of building structures. Two examples of dynamic deformation of RC structures with low loading rates typical for civil structures were considered to validate the calibration procedure.
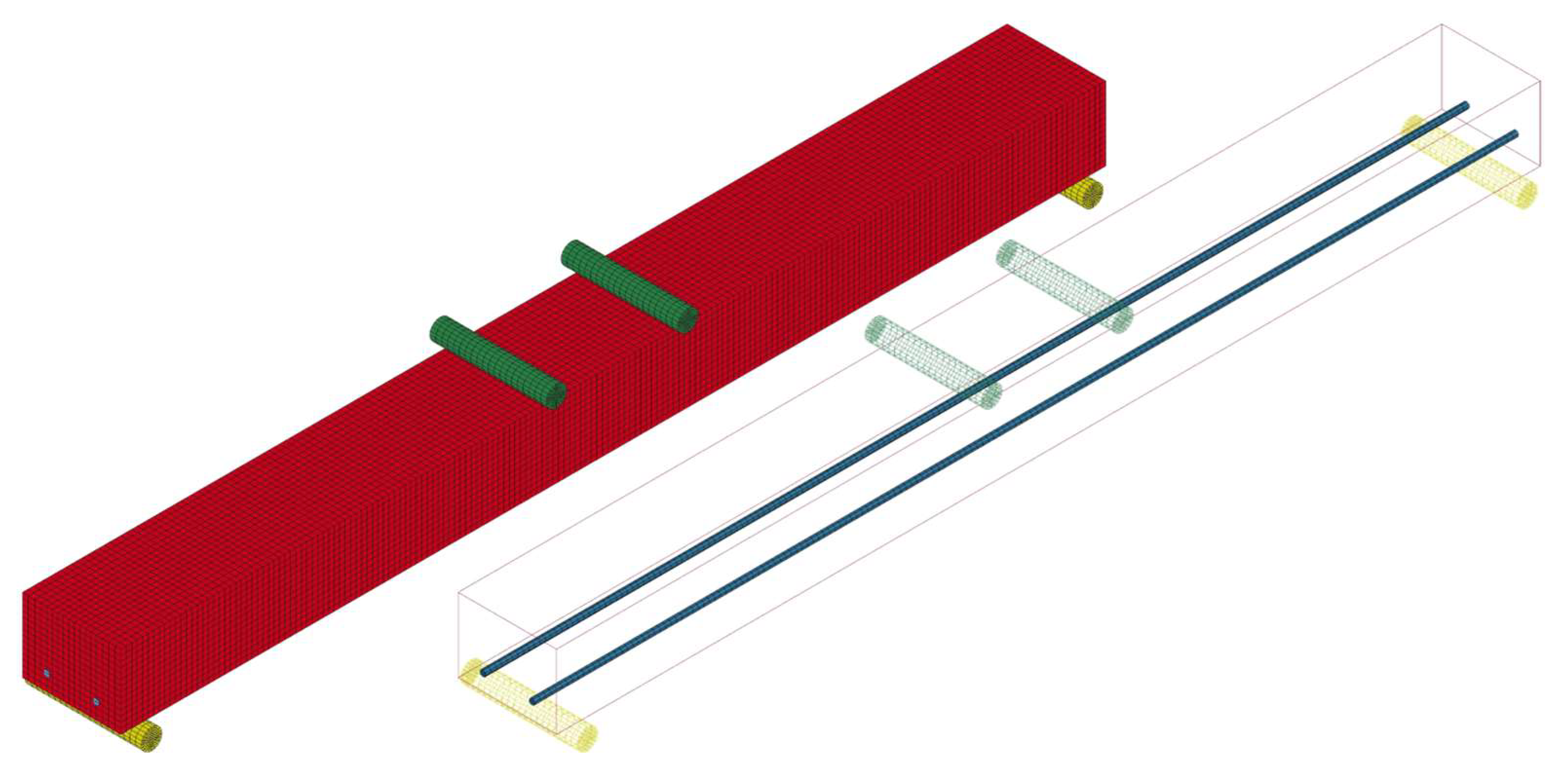
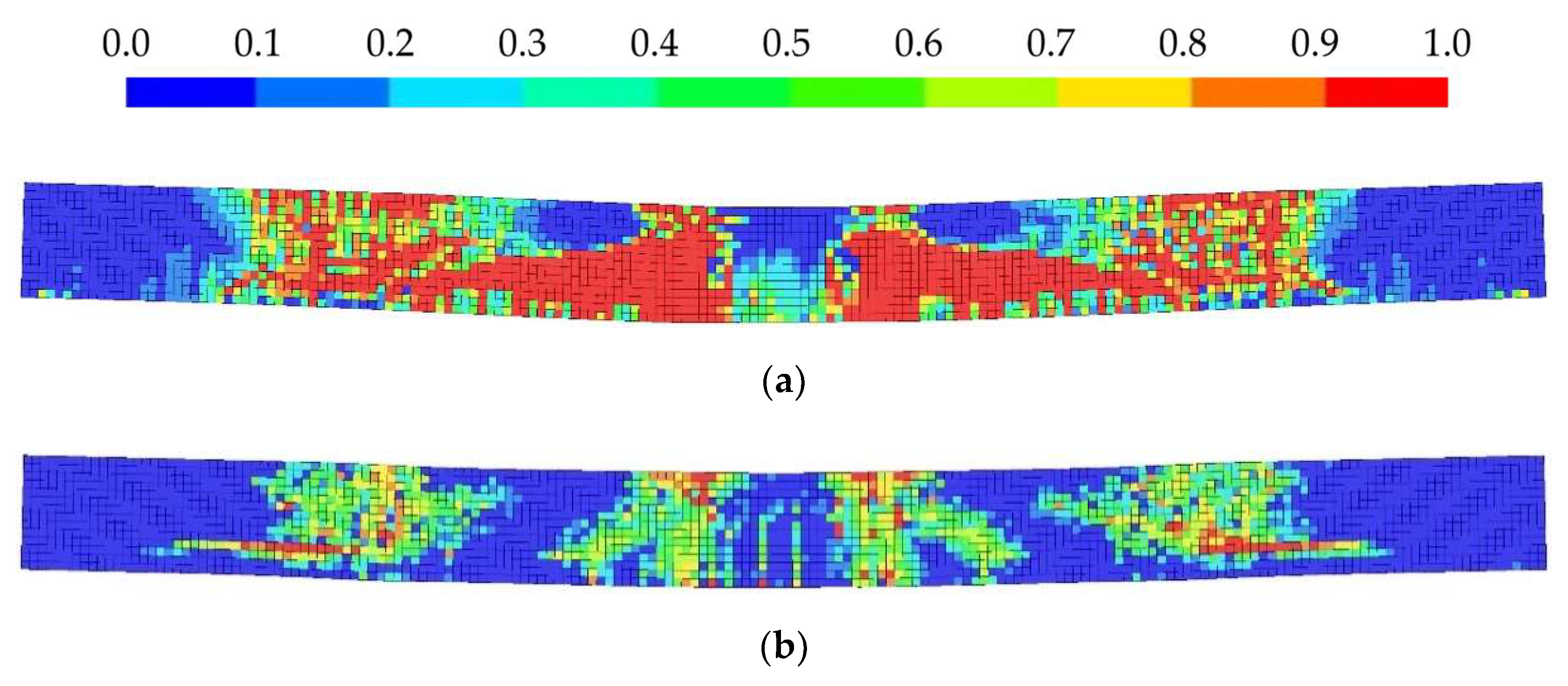
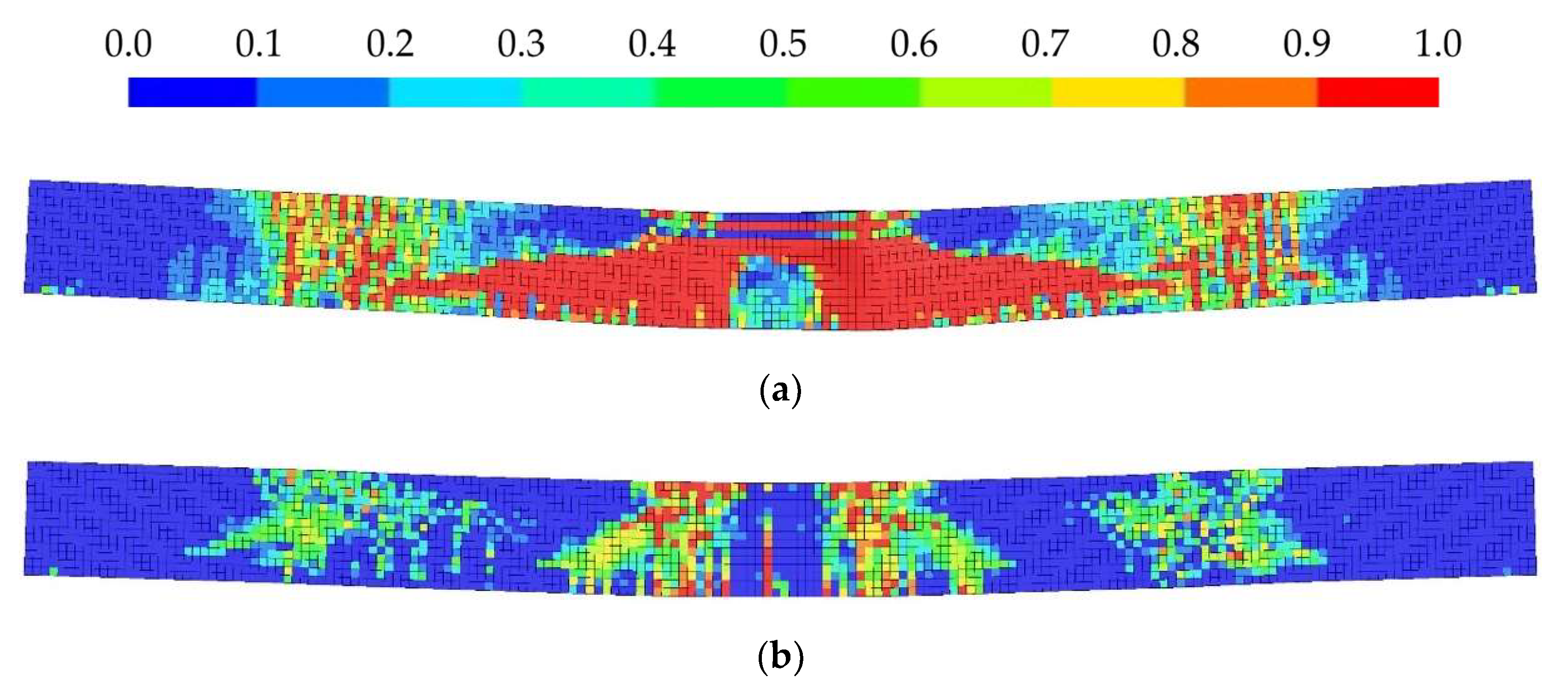
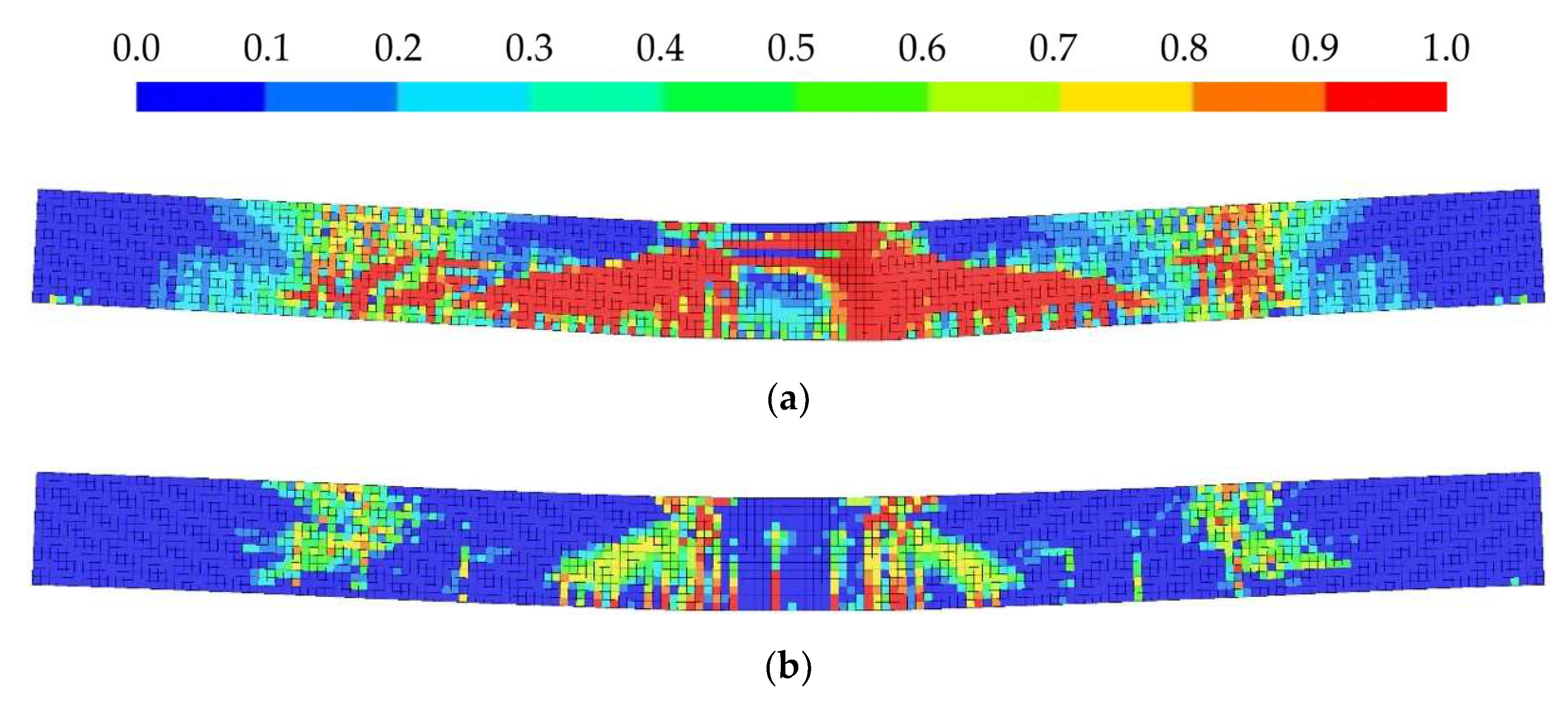
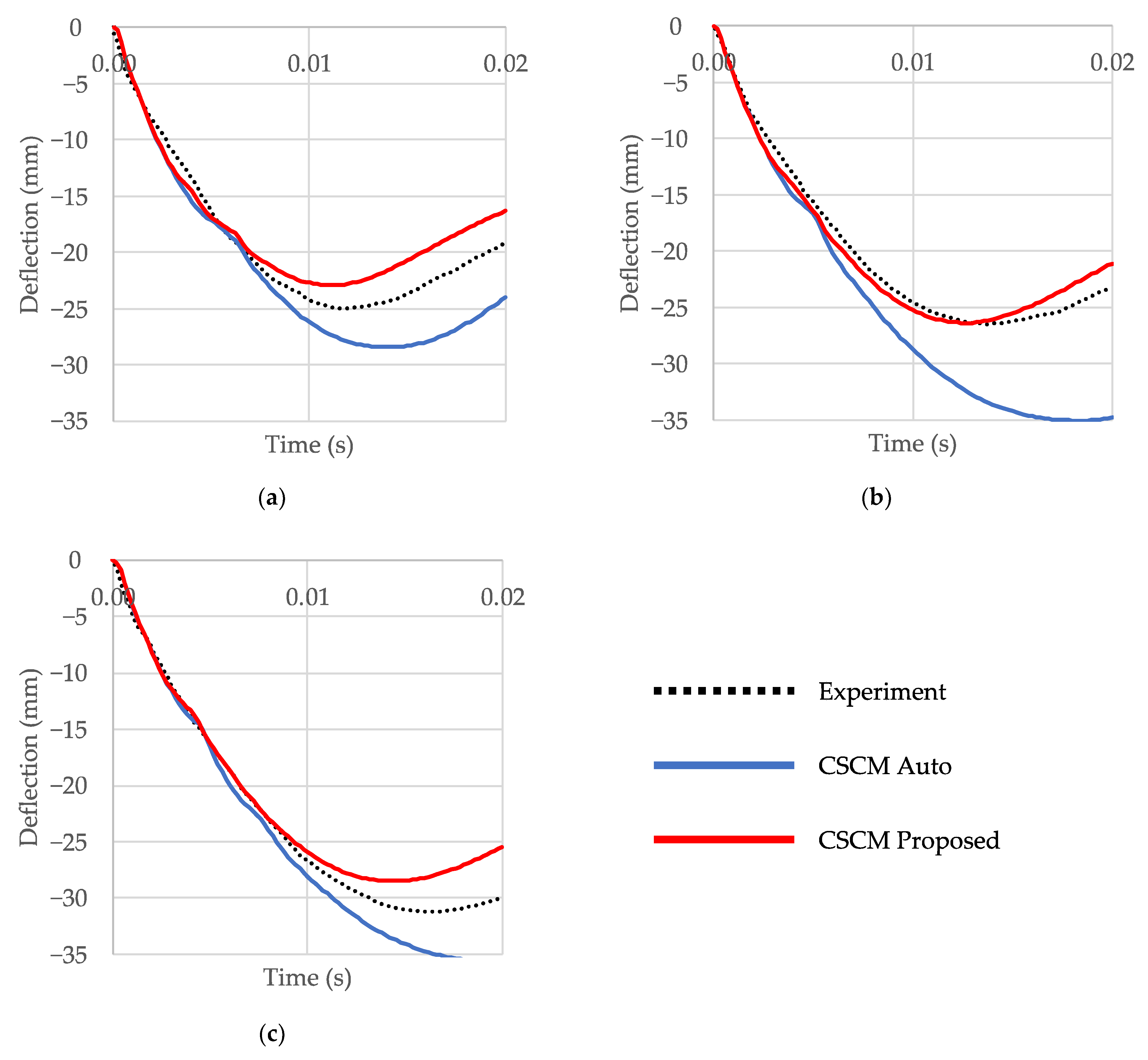
The first example, the low-velocity impact of a rigid impactor on an RC beam, shows a significant improvement in the detailed description of the fracture process. The crack pattern is more realistic; the peak displacement error for case B decreased from 14% to 8%, for case C, from 32% to 0% and for case D, from 14% to 9%.
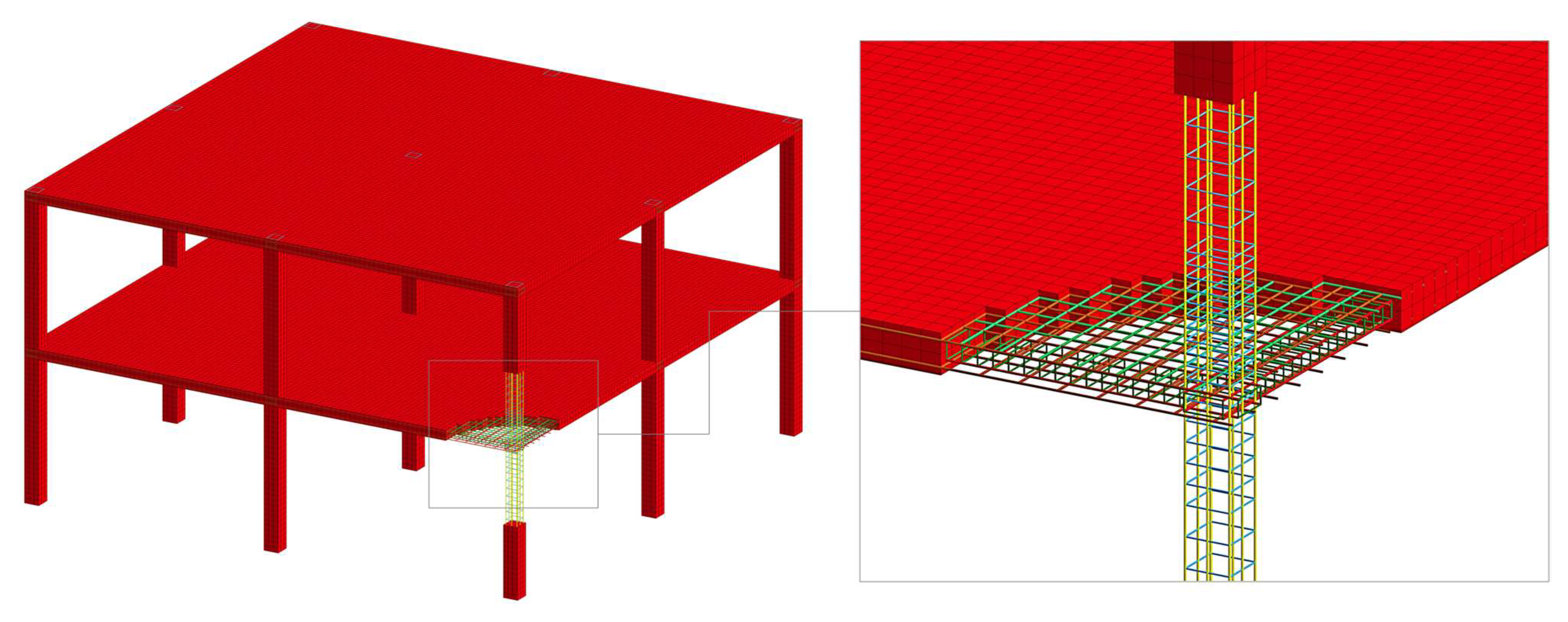
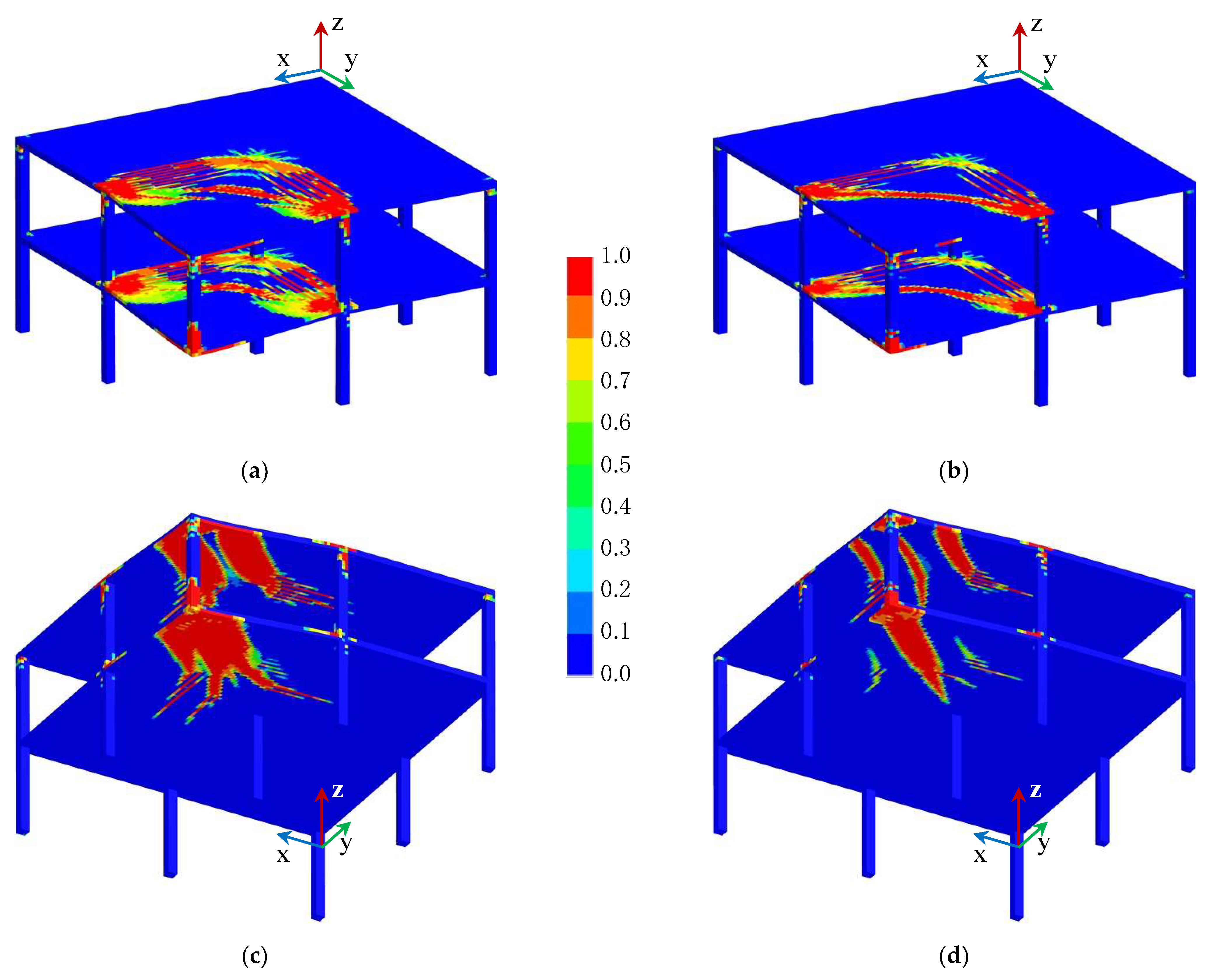
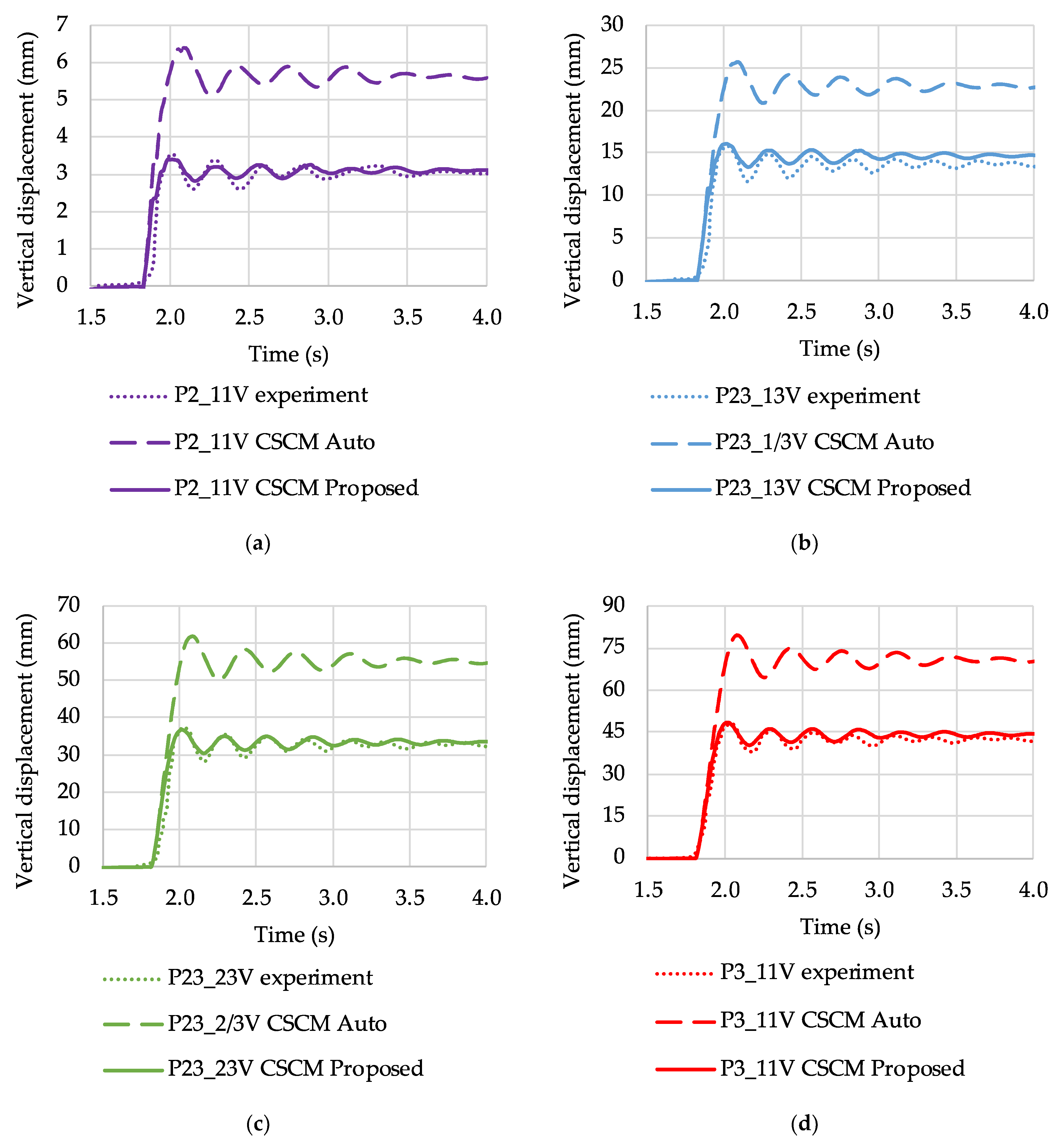
The second example is the progressive collapse of a two-story building frame local failure of a corner column. Simulation using the default Auto CSCM parameters calibration, due to significant underestimation of the tensile strength and fracture energy, leads to significant deviations from the experimental data: up to 100% error. Calculations using the proposed parameters of the CSCM model are much better in agreement with the experiment; the errors do not exceed 7%.
Thus, the developed calibration procedure improves the performance of the CSCM model over a range of concrete classes from C20 to C60 at low loading rates. Validation of the proposed procedure at higher loading rates will be the next stage of this study.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















