1. Introduction
With the urban population growing apace, the development of rail transportation systems has become of paramount importance to cope with traffic ramifications. Therefore, the construction of railways close to residential areas, hospitals, and other buildings that are sensitive to vibration is inevitable. To tackle the ensuing matters in such structures including noise and vibration, numerous researchers have probed the control methods of vibrations generated by railway vehicles.
In recent years, many researchers have become interested in applying different types of the finite element method (FEM) to study ground-borne vibration problems. Along with the application of FEM to vibration analysis, physical modeling has been used successfully in past decades [
1]. Scaled physical modeling and experimental approaches are also suitable for dealing with complex problems. The advantages of practical approaches and experiments have been extensively documented in previous studies [
2]. By contrast, physical modeling takes scaling into account, i.e., it maps the behavior from the laboratory scale to the full scale, to find out the response of structures in realistic conditions [
1,
3]. Attractive aspects of physical modeling include size reduction, simplicity, limited cost, and the possibility to study intricate systems and processes under controlled situations. This approach also paves the path for researchers to validate numerical and analytical findings based on the acquired empirical data [
4].
Physical modeling is a common method in the investigation of ground-borne vibrations initiated from underground tunnels [
5,
6,
7], the seismic damage characteristics of a subway structure under strong ground motions in saturated soft soil [
8], the seismic response features of geogrid reinforced rigid retaining walls with saturated backfill sand [
9], and the three-dimensional (3D) physical and numerical modeling of circular tunnels subjected to seismic excitations [
10].
In addition to the widespread use of scale modeling to study the behavior of underground tunnels, physical and numerical models have broadly been applied in earthquake engineering to account for the soil–structure interaction (SSI) and the influence of foundation type on the vibrations in the structures [
11]. The SSI effect on the seismic response of four systems was studied [
12]. Two physical models comprised of fixed and flexible bases were utilized that underwent four scaled earthquake acceleration records [
13]. Additionally, the influence of shallow foundations on the seismic response of a fifteen-story moment-resisting frame under earthquake excitations was inspected [
14].
Certain analytical studies have addressed the impact of a series of important parameters such as Winkler–Pasternak constants, material properties, wave number, and thermomechanical loading, among others, on the wave propagation and behavior of functionally graded sandwich/anisotropic plates laid on an elastic foundation using the refined plate theory without the shear correction factor [
15,
16,
17,
18].
3D FEM has been employed to inspect the effect of isolation using foundations on train-induced vibrations in buildings [
19]. Finite element (FE) analysis has also been implemented to investigate the influence of different parameters of concrete slabs and stabilized soil underneath the slab on vibration reduction [
20]. The vibration characteristics of ballasted tracks with and without a ballast mat were analyzed using numerical simulations and field experiments [
21]. François et al. [
22] investigated a two-story building with three different foundation types (i.e., slab, strip and box) under traffic-induced vibrations considering the SSI. It was found that the response of the floors was dominated by local bending modes, and the effect of foundation type on the vertical structural response was relatively insignificant. Auersch [
23] analytically computed the vertical transfer functions of the soil–structure system through resonance and compared the findings with field results. The building was taken as a lumped mass on the foundation, and the influence of soil type and foundation geometry on the vibration in different floors was neglected. Kuo et al. [
24] used a hybrid model to evaluate the effect of structure and soil parameters on the level of vibration in the building. Their results indicated that the soil type had a more noticeable effect on the vibrations compared to the building geometry, whereas the foundation type had a small effect on the vibrations in different floors. Sanayei et al. [
25,
26] reported that increasing the thickness of the first floor in a multi-story building could reduce the ground-borne vibration attributed to the passage of trains. They examined a scaled-down building to test a previously developed analytical prediction model [
27]. They also analyzed the vibration attenuation via a thick slab, indicating its applicability as an attenuator of external vibration sources. Colaço et al. [
28] ran a series of in situ tests on the structure built next to a railway line to investigate the soil–structure interaction under ground-borne vibration and validated their developed 3D FEM model.
The technical literature review shows the lack of a small-scale soil–structure experimental study under controlled conditions focusing on the effect of foundation type on vertical vibrations in a building while taking all of the effective parameters into account. To fill this gap, this paper lays the groundwork for further realistic scaled-down modeling of structures subjected to train-induced vibrations. To this end, a framework is presented for small-scale modeling to estimate the impact of foundation geometry on the ground-borne vibrations in a building near a railway track. This procedure includes the following steps: (i) introducing the right scale relations and factors to model the prototype considering the wave propagation problem, (ii) choosing the proper granular soil and rigid container with energy-absorbing boundaries to simulate an infinite soil layer under free field conditions, (iii) scaling down the prototype and manufacturing the adequate steel model, and (iv) applying the input excitations to take into account the loading effects produced through the train passage and measuring the dynamic test data. To quantitatively evaluate and compare the vibration attenuation efficacy of these three different foundation types against the received vibrations in the soil and floors, an analysis in the frequency domain is performed and the vibration levels of the structure model with single, strip, and mat foundations are extracted from the test results.
4. Conclusions
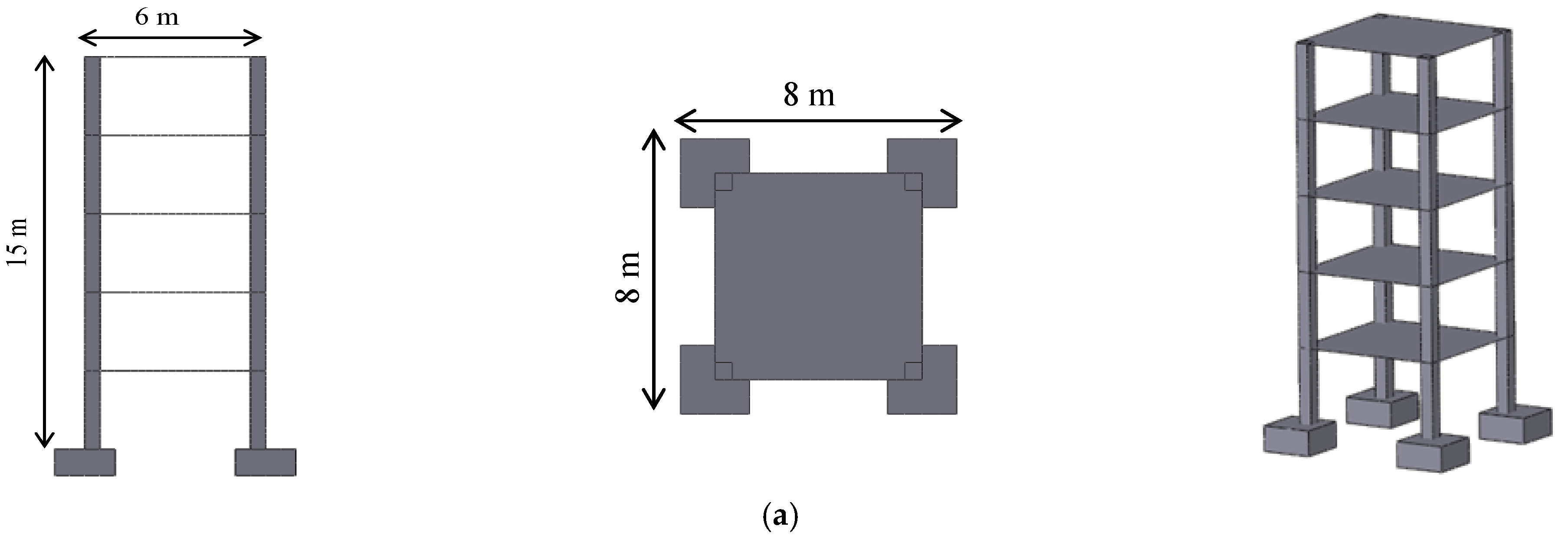
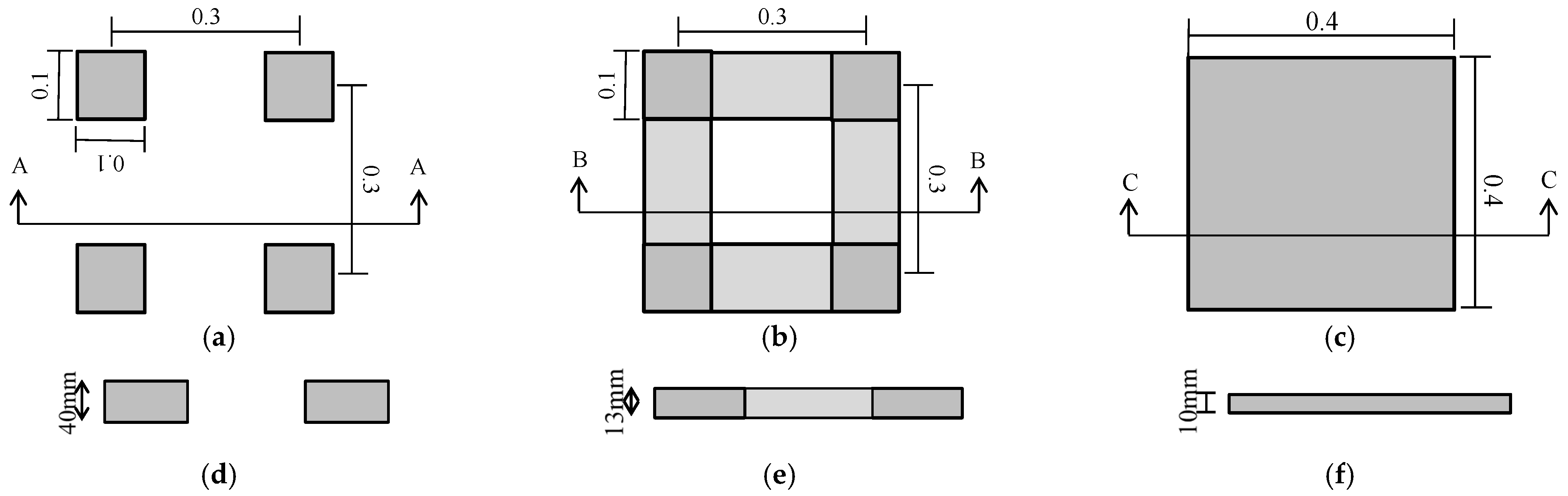
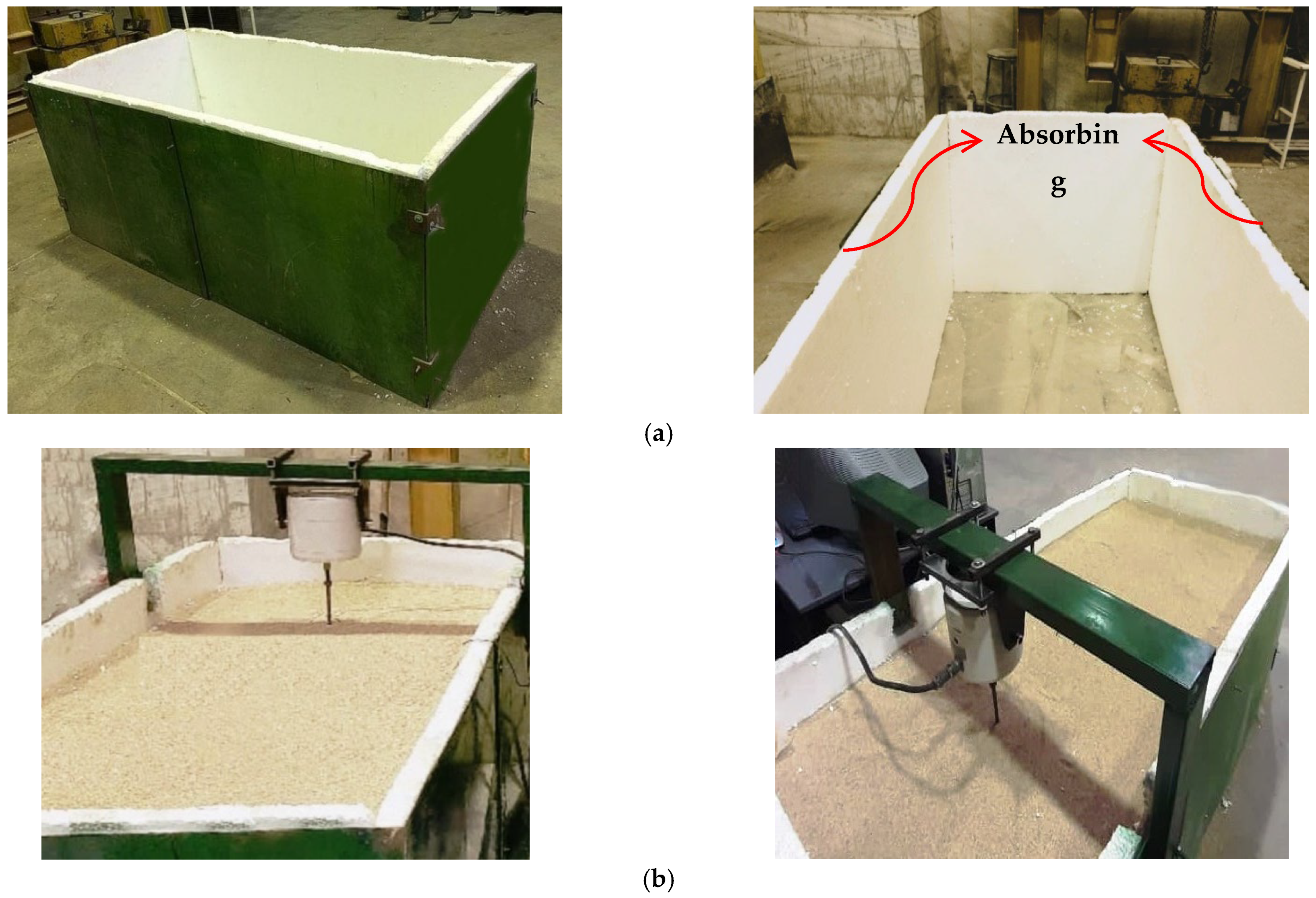
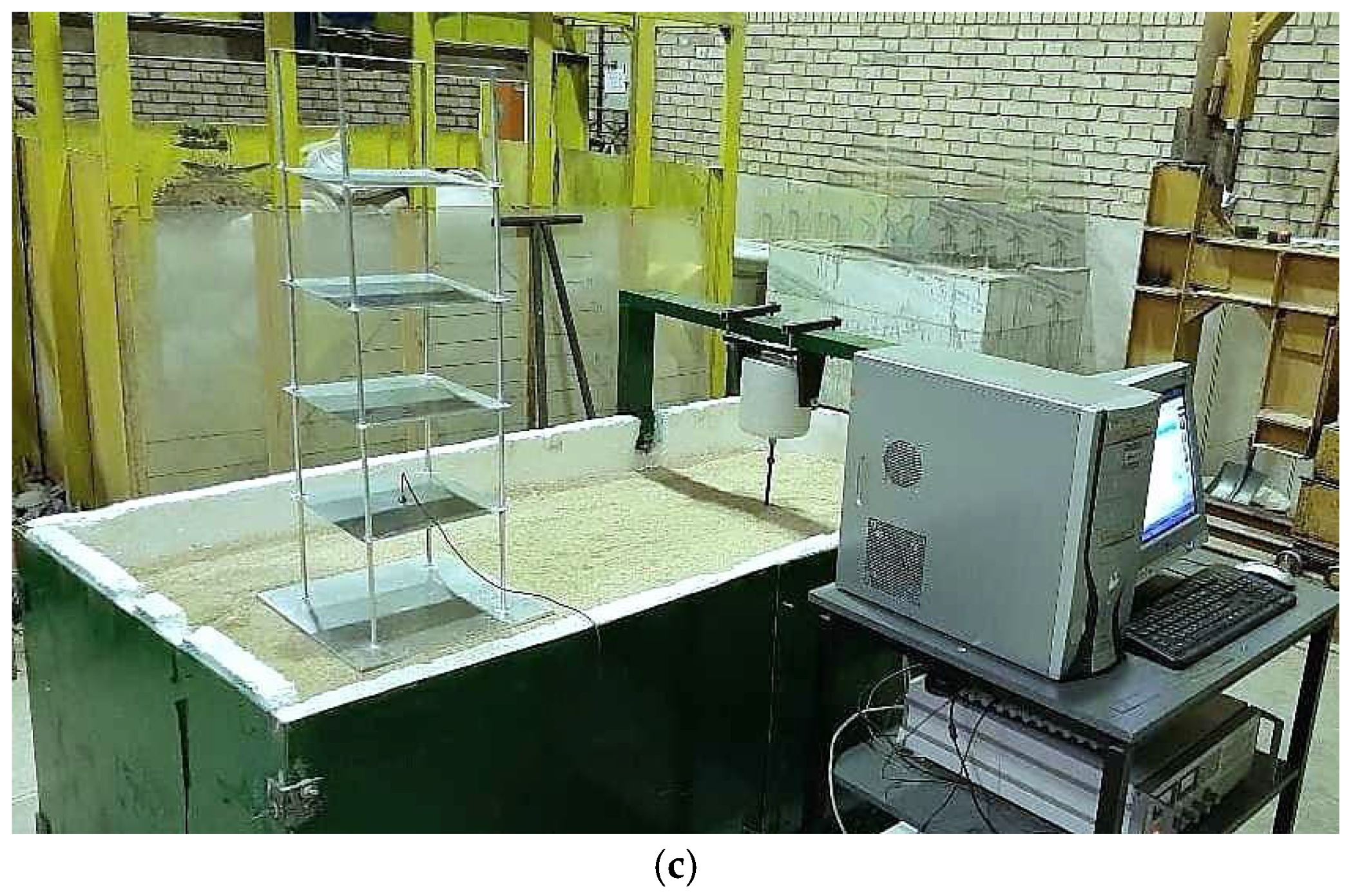
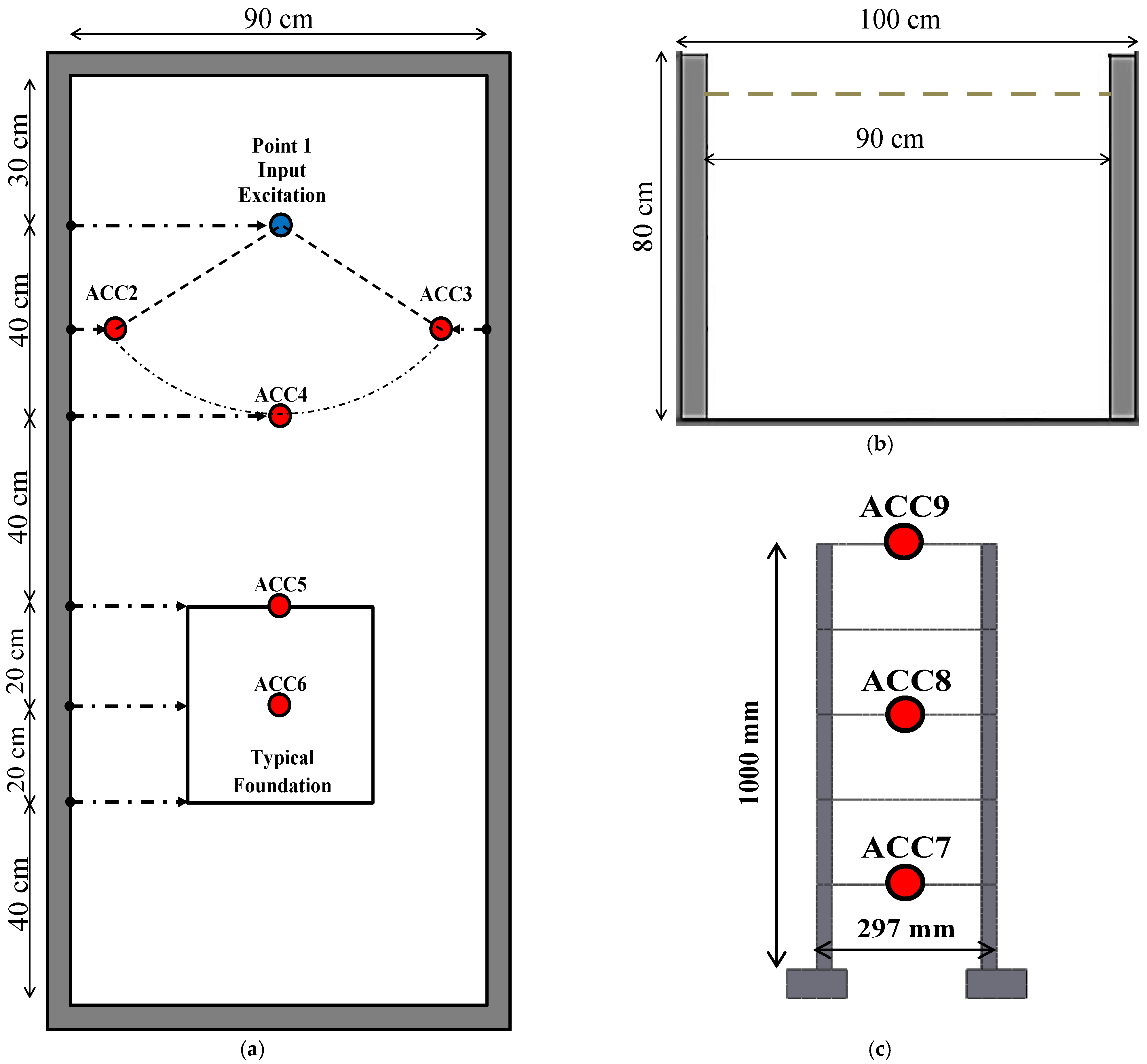
The present study exhibited an organized approach for the scaled modeling of a typical five-story concrete moment-resisting frame subjected to train-induced vibration. To this aim, 1-g scale modeling, where g is gravitational acceleration, was implemented and the geometric-scaling factor, (prototype to model) was considered to be 20. To form the test model, a rigid container was meticulously manufactured from steel plates and the conventional foams were placed on the side walls as energy-absorbing boundaries. Dry sand was poured in layers and compacted by a laboratory roller to achieve a relative density of Dr = 70%. Consistent with the simulation factor , the scaled structure was made using five steel plates as floors and four vertical steel bars as columns with welded connections. Three foundation types, namely single, strip and mat, were utilized in the steel experimental model, seeking the effect of foundation geometry on the ground-borne vibration in the building. The weight of all three foundations was kept almost constant.
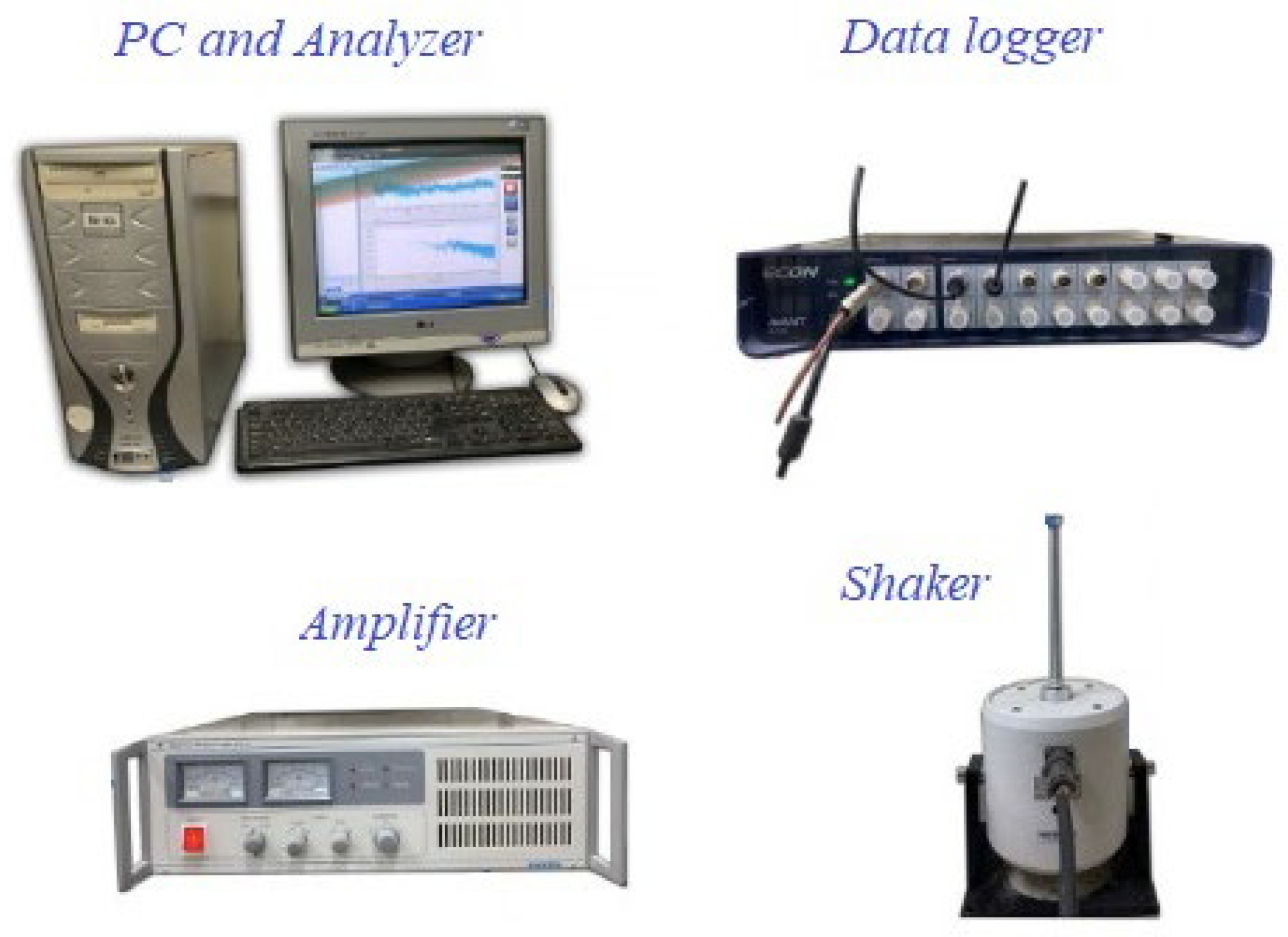
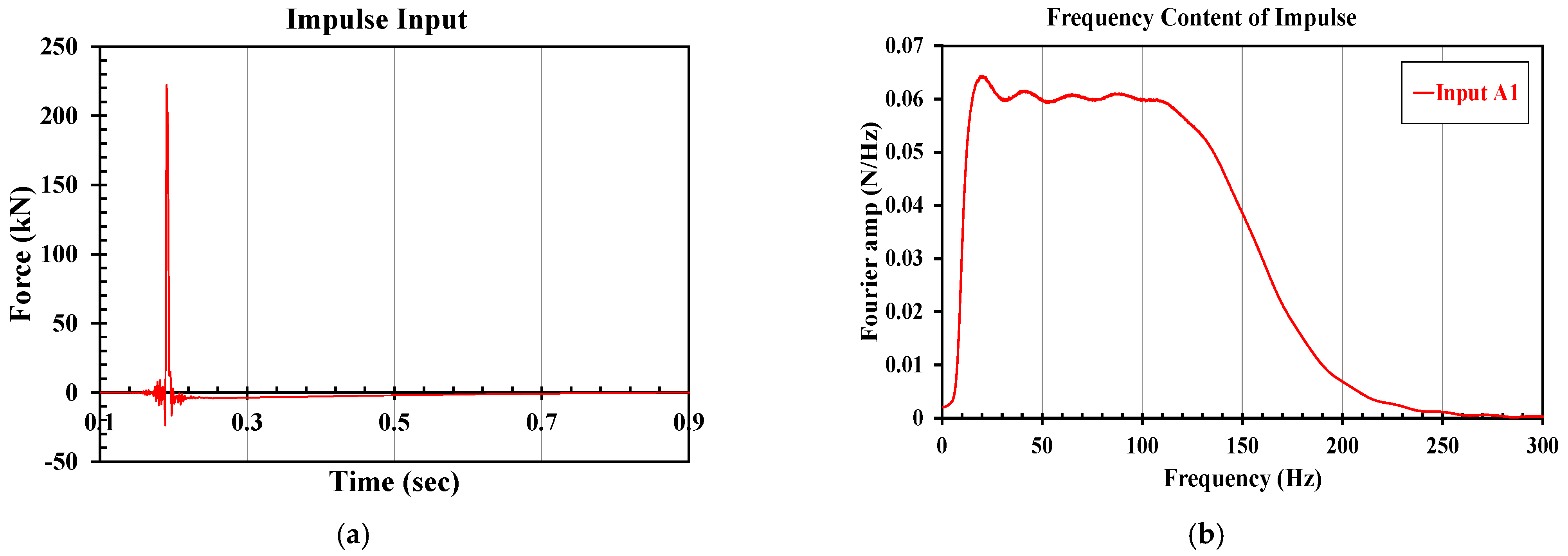
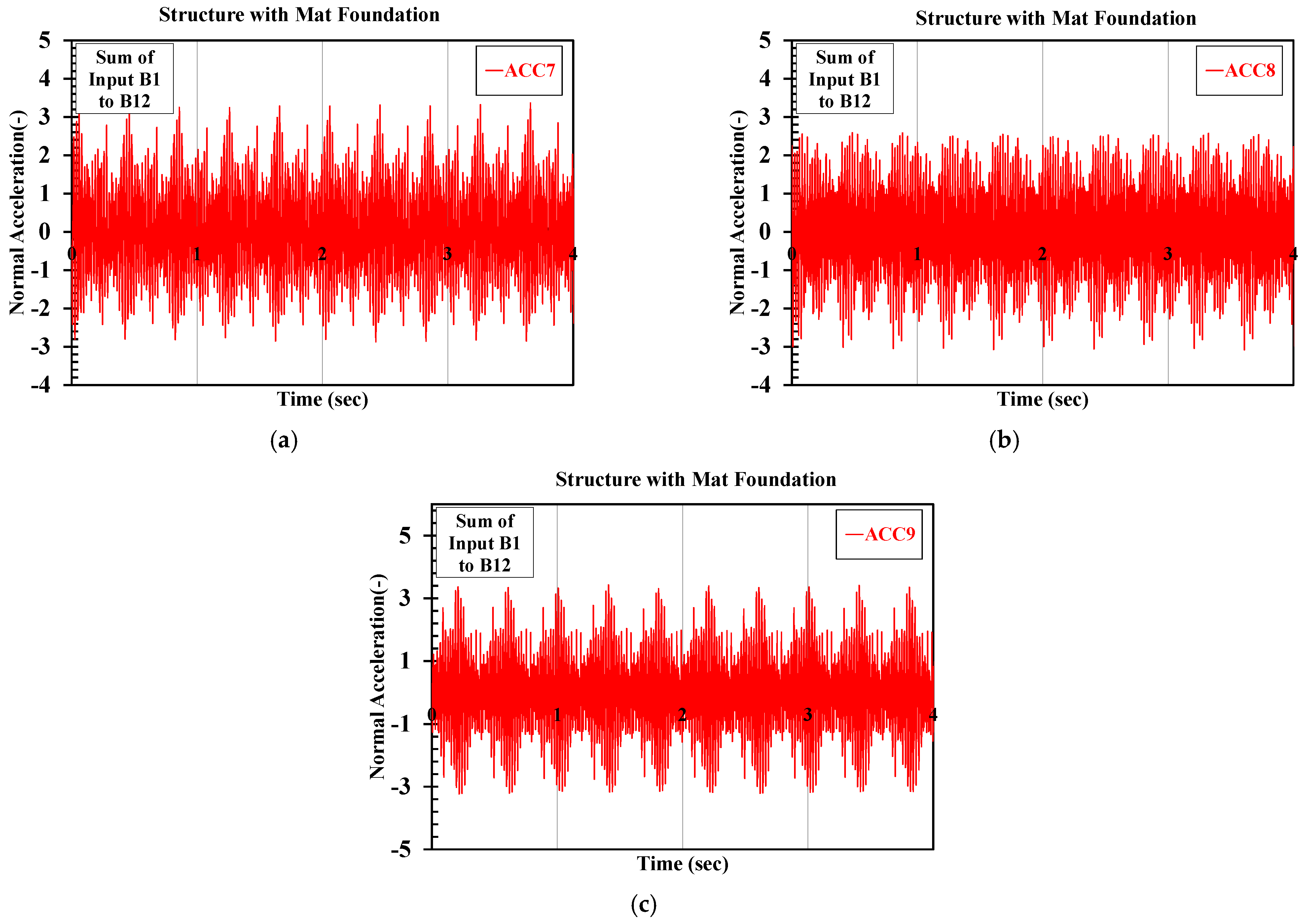
An array of uniaxial accelerometers was installed at respective points of the test model to measure the required dynamic response. The scaled impulse and harmonic inputs were applied for the realization of the natural frequencies and linear elastic dynamic responses of the soil and structure. All presented results are in the model scale. In the following lines, the remarkable outcomes are summarized:
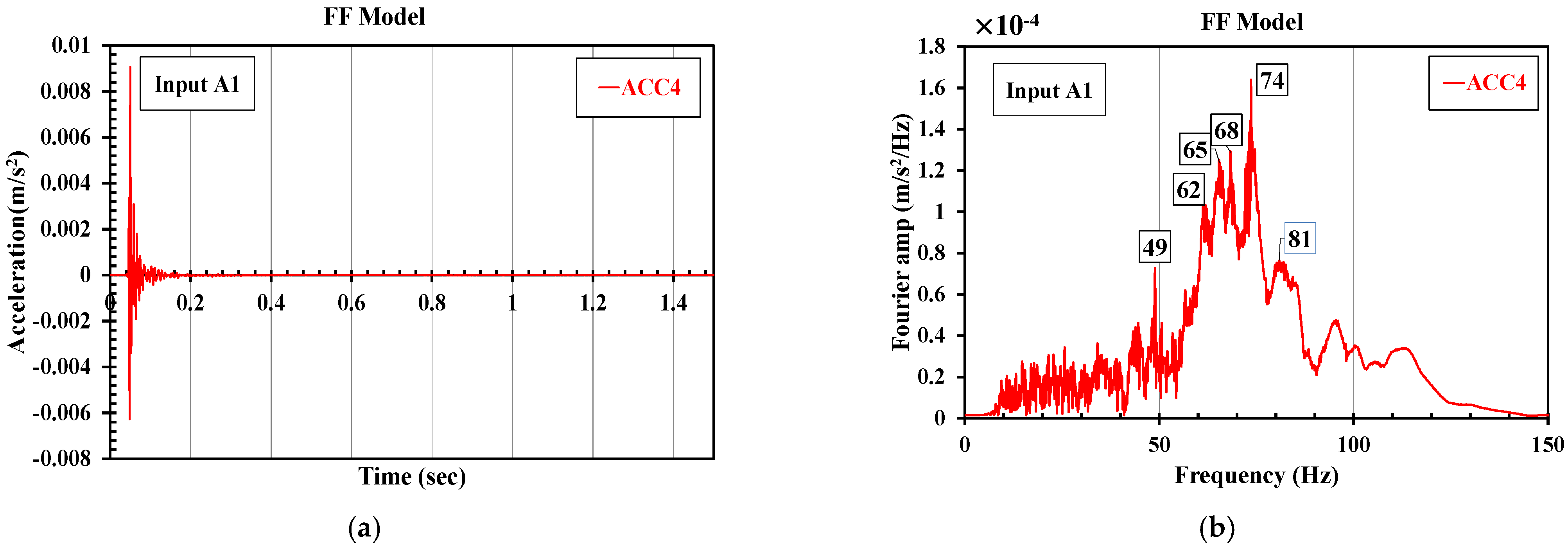
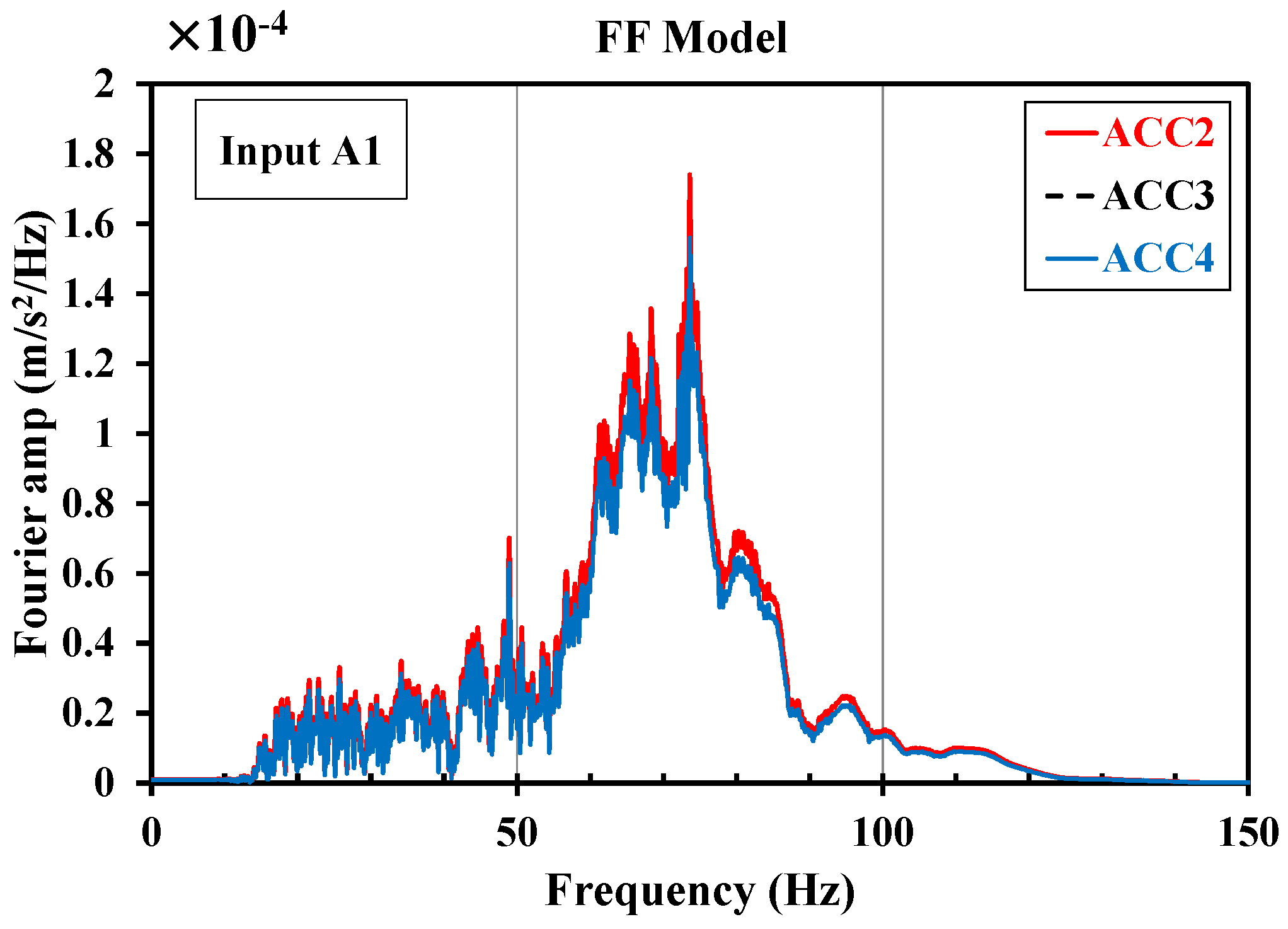
Based on experimental modeling, the frequency content of FF response was dominated by the frequencies of the vertical translation modes, i.e., 49, 62, 65, 68, 74, and 81 Hz.
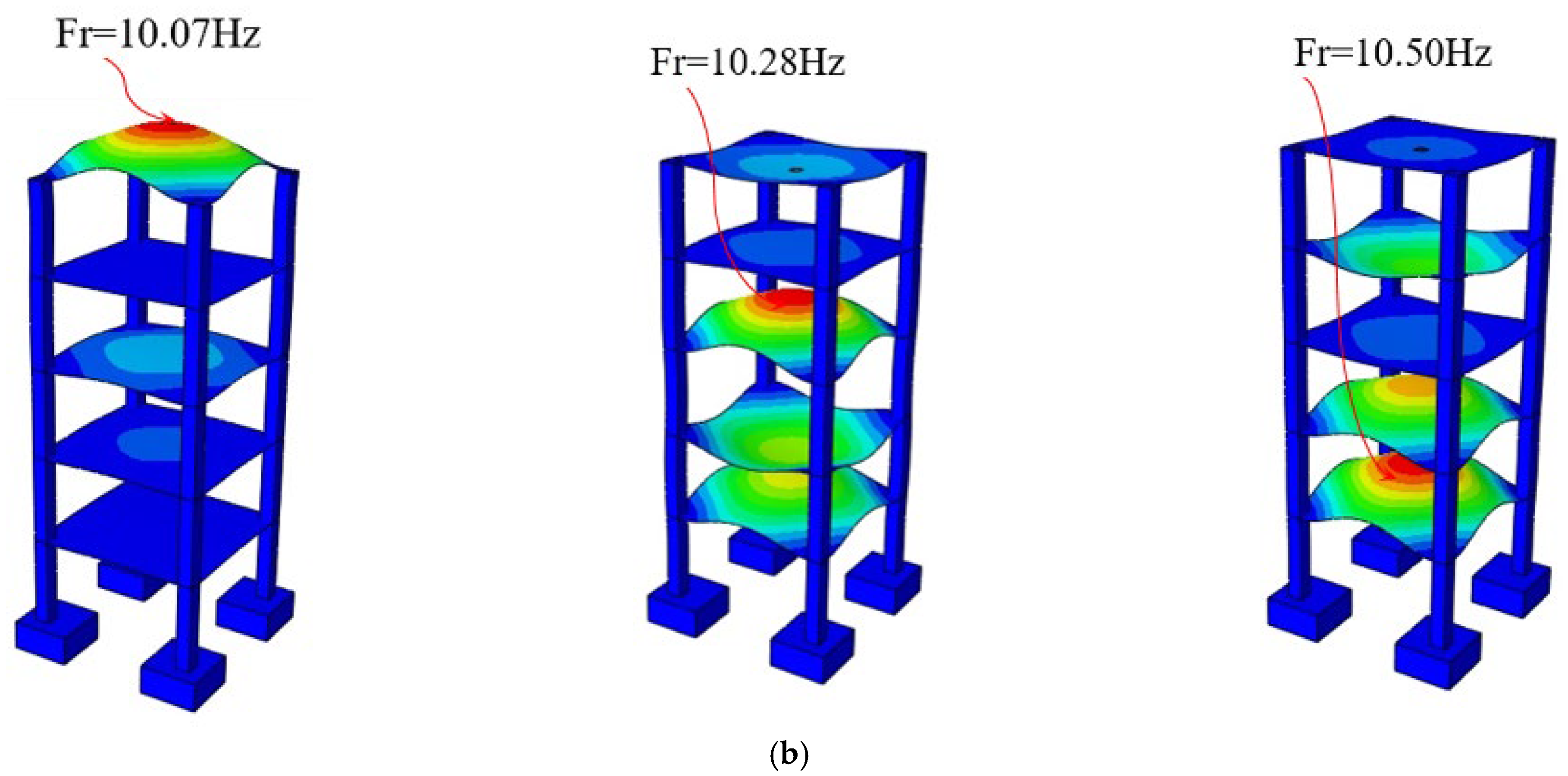
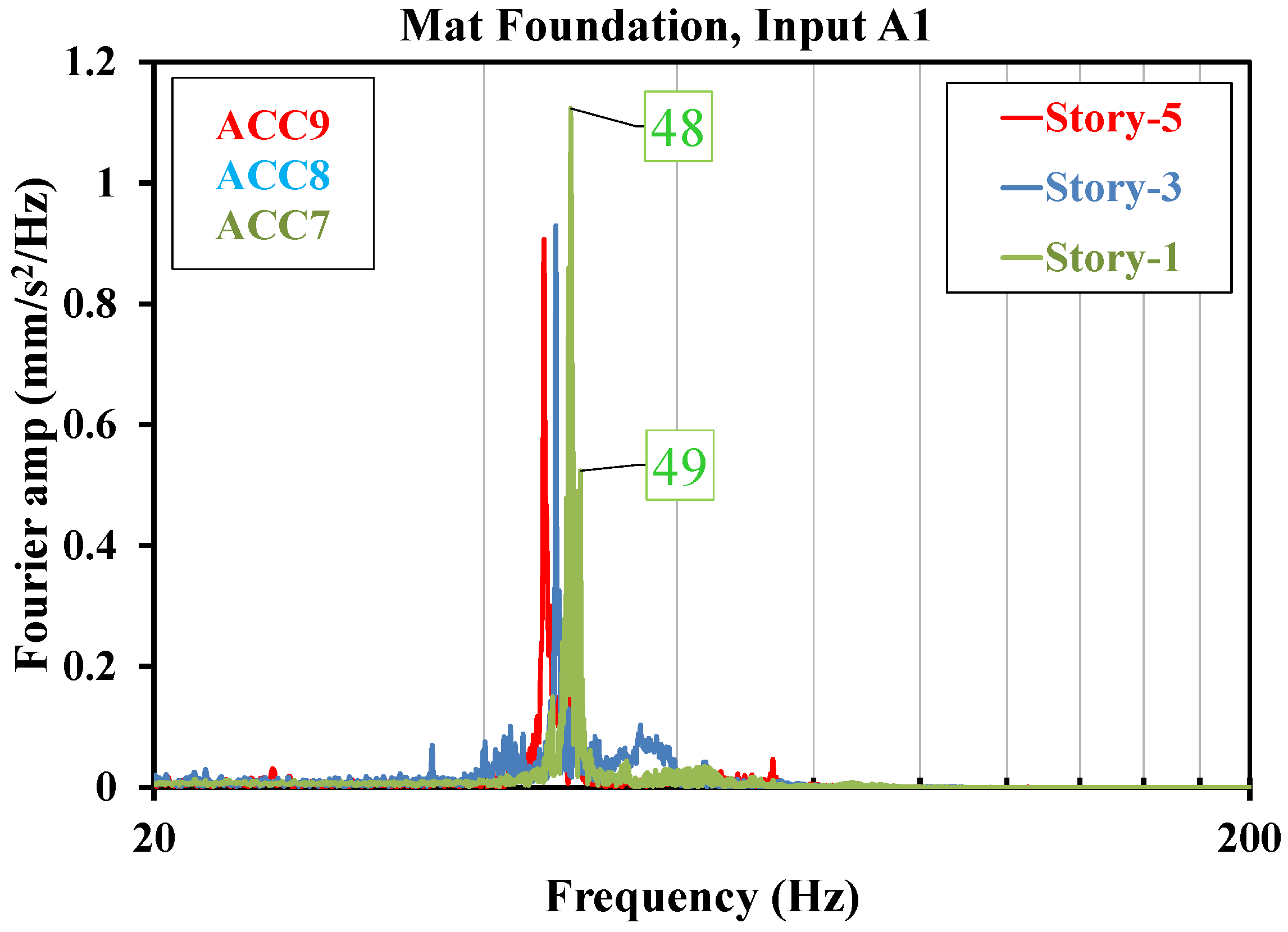
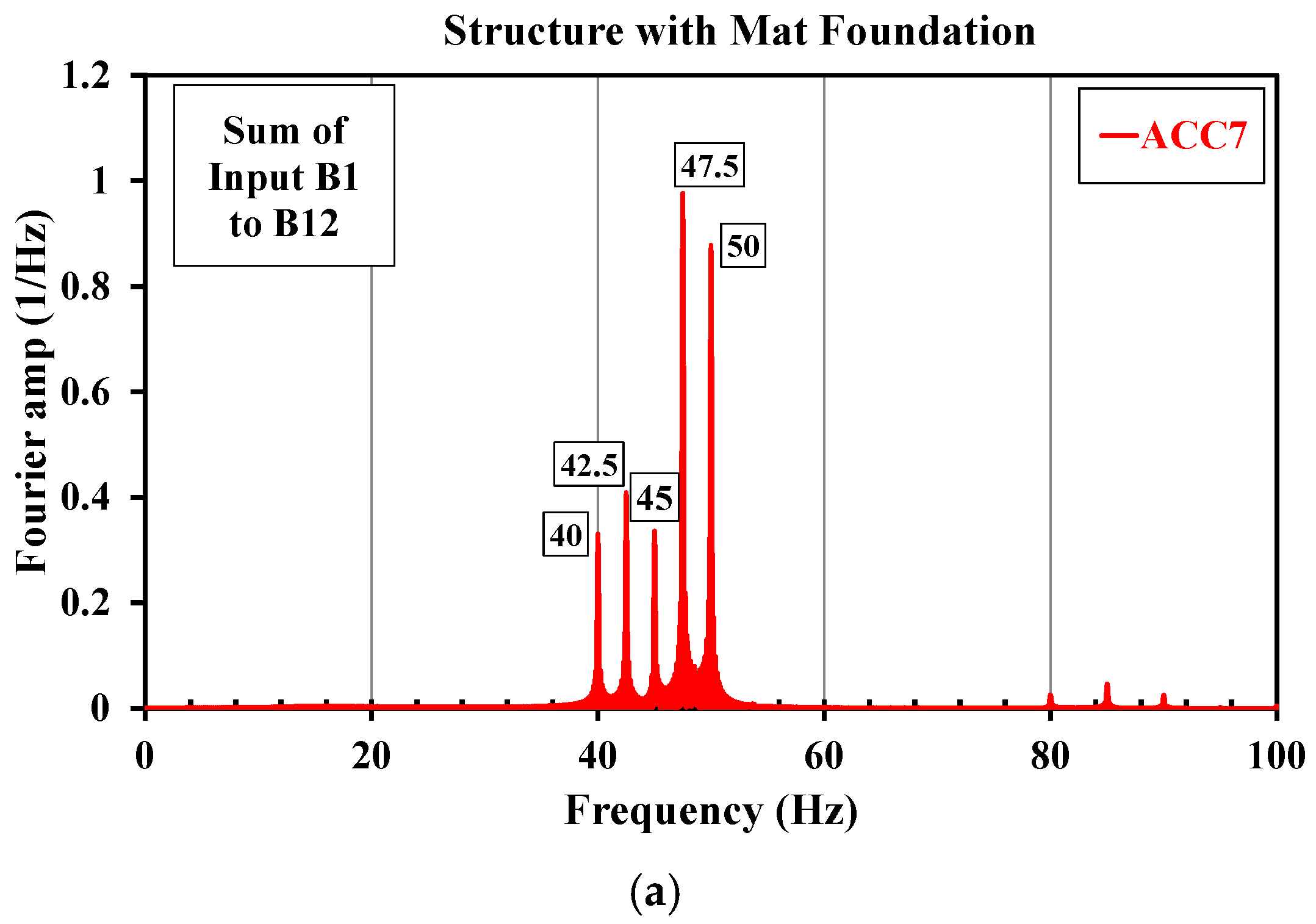
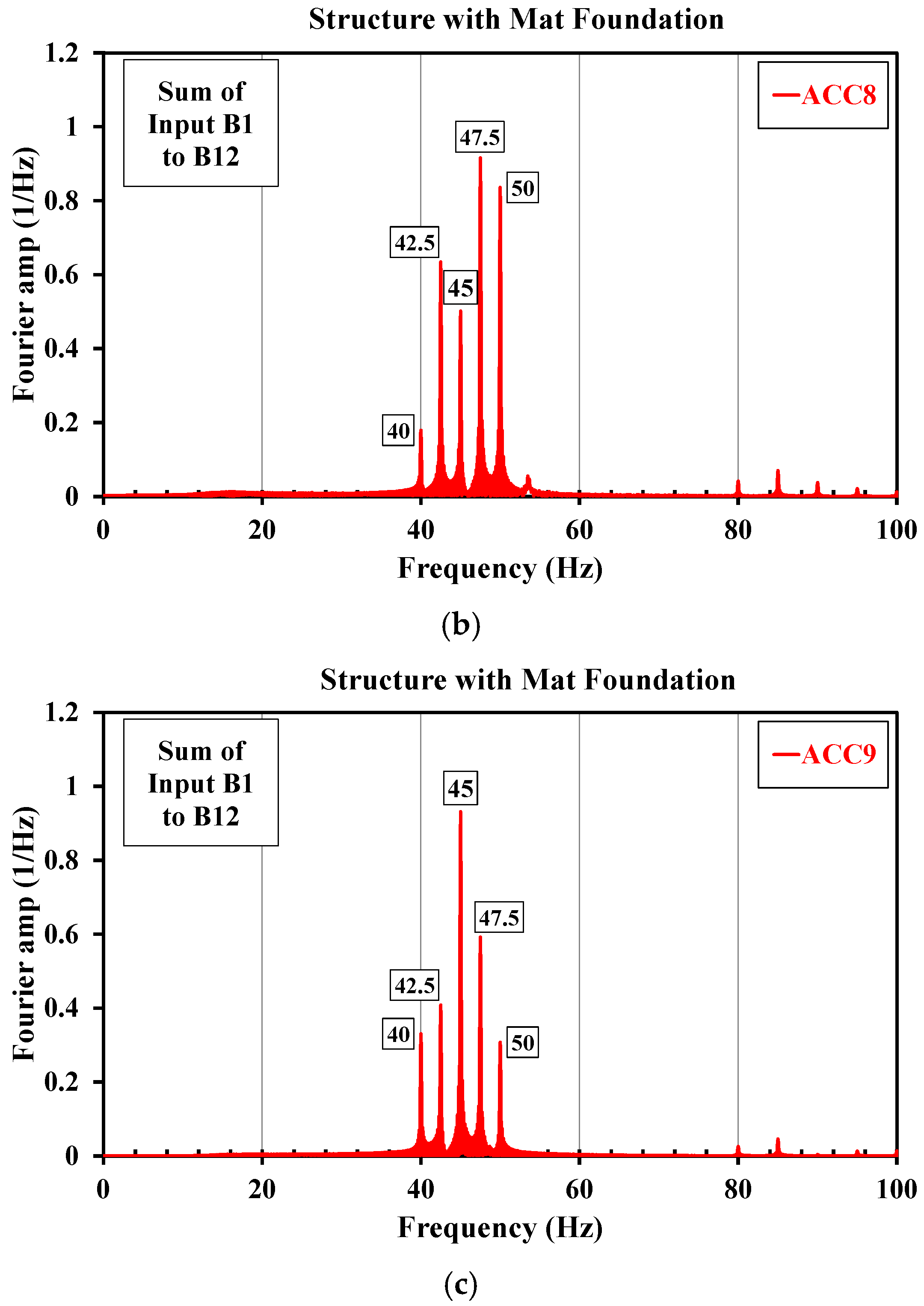
The experimental measurements concentrated on the mode shapes and natural frequencies of the structure associated with the first local bending mode of slabs. The resonance points in the frequency response of the slabs signified the frequencies 45, 47 and 48 Hz corresponding to the fifth, third and first floors, respectively, in ascending order.
As the bending mode frequency of the floor slab approached 49 Hz, the Fourier amplitude was sharply amplified.
An assessment of vibration level in the soil and on the floors as the main indicator that quantitatively depicts the effectiveness of the evaluated foundations subjected to ground vibration is listed below.
- 4.
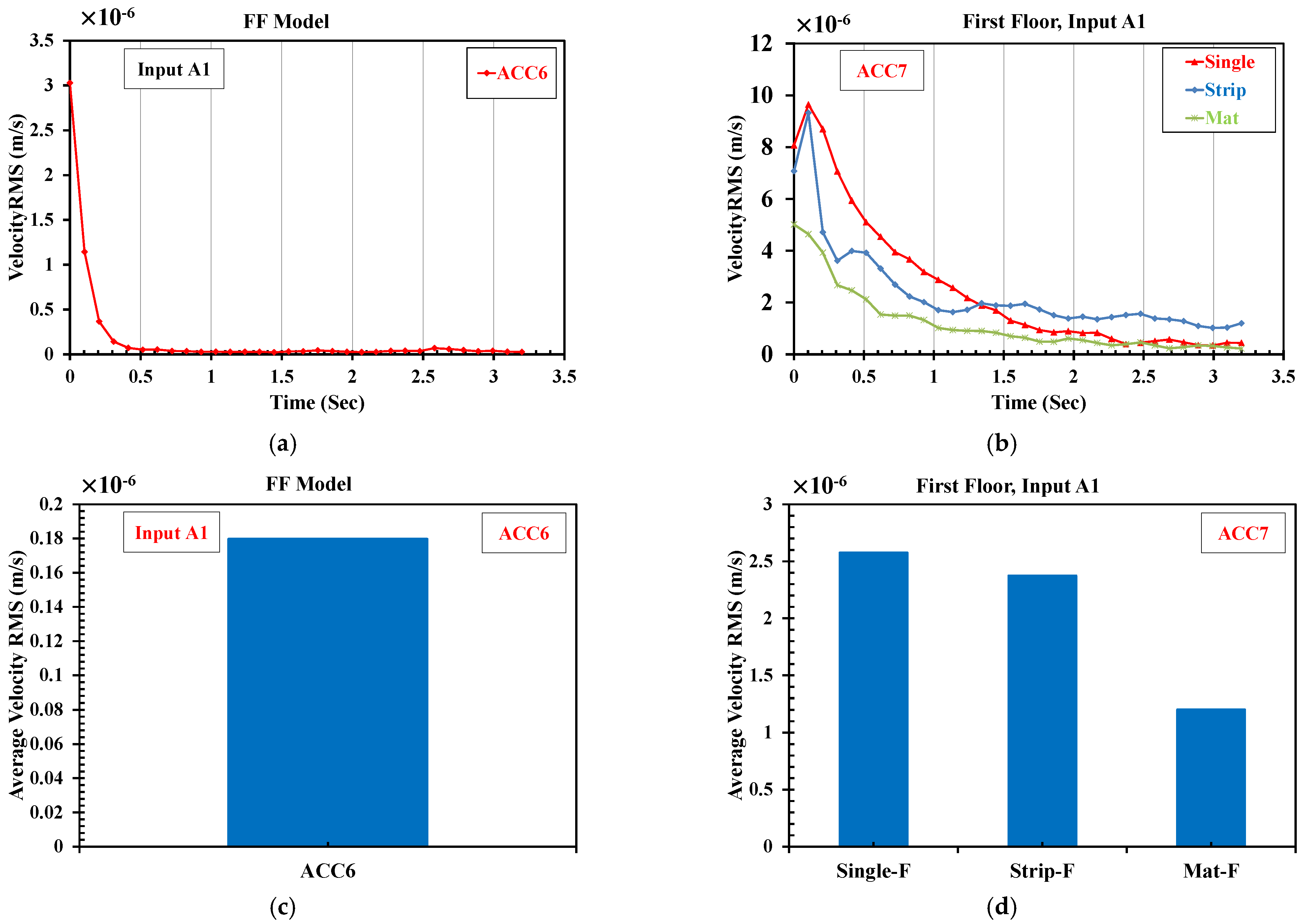
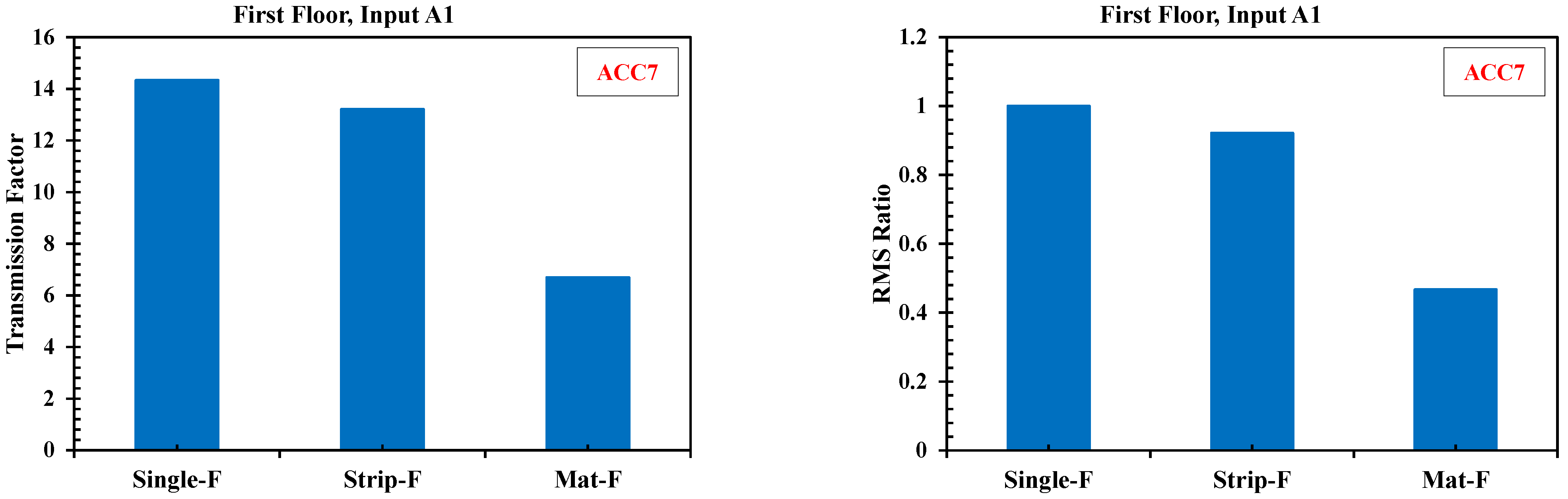
The vibration level transmitted via foundations to the floors, i.e., TRF, had the minimum value in the structure with a mat foundation, displaying the best efficiency among all foundation types.
- 5.
The RMS ratio (RR), which is defined as the RMS of other foundation types divided by that of a single one, confirms the decreasing operation of the mat foundation vis-à-vis other types, generated by its rigidity.
- 6.
In agreement with item 3, it should be emphasized that the TRF values exceeded unity since the bending mode frequency of the floor slab tended to approach the frequency of the soil’s vertical translation, leading to resonance amplification.
- 7.
The strip and mat foundations caused RR to diminish on the first floor by, respectively, about 8% and 53% compared to the single footing. This is a notable achievement, particularly in satisfactory agreement with previous works. In the end, it is proposed to implement the same experimental investigation making use of other soil types and multi-span frames.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}