1. Introduction
Over decades, reticulated domes have been employed in conference halls, sporting halls, transportation hubs and other facilities. Thanks to a reasonable transformation of the bearing mechanism from bending to compression, spatial reticulated domes provide building schemes with a light self-weight, long-span and flexible design. However, domes are built of a low damping capacity steel. Reticulated domes are often located in seismic regions around the world and are subjected to earthquakes and strong winds, causing an excessive vibration of structures. Excessive vibrations are due to large dynamic forces and small damping ratios of domes made, for example, of steel. It is well known that the above-mentioned undesirable vibration could be significantly reduced with the help of passive control devices, such as rubber-bearing isolators [
1], tuned mass dampers [
2], viscous and viscoelastic (shortly VE) dampers [
3,
4] and other ones [
5].
The dynamic analysis of domes is manly devoted to the analysis of the vibration caused by earthquakes [
6,
7,
8,
9,
10,
11,
12], although, in some of them, vibration excited by wind is analyzed [
13]. The nonlinear elastoplastic analysis of domes is presented in [
10,
11]. The seismic behavior of reticulated domes, together with its fragility analysis, is presented in [
8]. The effects of the semi-rigidity of the joints of reticulated domes are analyzed in [
9]. The accuracy of the application of the response spectrum method to the earthquake analysis of domes is studied in [
12]. A few papers [
14,
15,
16,
17] describe the results of the experimental analysis of reticulated domes. The dynamic instability of a small reticulated shell is experimentally studied in [
14], in which the authors proposed the instability criteria. Interesting experimental and numerical results concerning the effects of complex damping on the seismic responses of reticulated domes are presented in [
16]. The modeling of damping in latticed domes is the subject of papers [
17,
18]. In [
17], an approach to the modeling of material damping is proposed and applied to the nonlinear dynamic analysis of single-layer latticed domes subjected to earthquake ground motions. Moreover, in [
18], a new method for the simulation of damping in single-layer domes is proposed. A few papers [
19,
20,
21,
22] describe new isolation devices and the dynamic performance of single- and double-layer domes with dampers. The optimization of dome structures with dynamic constraints is presented in [
23,
24], while, in [
25], the dynamic analysis and seismic design method for reticulated domes with semi-rigid joints are discussed. Recently, an interesting nonlinear dynamic analysis of lattice domes was presented in [
26], where the uncertainty of structural parameters is taken into account. Very recently, the dynamic reliability analysis of super large lattice domes was presented in [
27].
Due to the great dynamic forces caused by earthquakes, the reduction of a dome’s vibration is an important practical problem, and some isolation systems and devices are proposed. The innovative passive vibration control device is experimentally and numerically studied in [
28]. It can be found that this system is able to reduce the displacement responses, acceleration responses and input forces of the long-span reticulate structure. In [
29], the effectiveness of two-directional and three-directional isolation systems is compared. Moreover, the numerical and experimental analysis of some isolation systems for reticulated domes is presented in [
19,
21,
30]. The analysis of the effectiveness of a semi-active control system, applied in the reduction of the vibration of long-span reticulated steel structures, is presented in [
31]. A probabilistic seismic analysis of reticulated domes with VE dampers is given in [
32], whereas theoretical and experimental studies of domes with a viscous damper are described in [
33]. A new-type friction damper dedicated to the reduction of double-layer reticulated shells is proposed in [
20]. The seismic performance of the reticulated dome with dampers is also analyzed in [
34]. In [
35], some experimental results for a dome with isolated supports are reported, whereas the topology optimization of a reticulated shell is presented in [
36].
In the dynamic analysis of each structure, the knowledge of its dynamic characteristics is of primary interest. The natural frequencies and modes of vibration, which are usually needed, are obtained after solving the appropriate linear eigenvalue problem [
2]. This is a standard procedure. In the context of the dynamics of reticulated domes (treated as undamped systems), some information about the frequencies and modes of vibration can be found in [
10,
12,
29,
37], usually as a description of the dynamic characteristics of the considered domes. Only paper [
37] is related to the determination of some specific modes of vibration. Papers related to the determination of the dynamic characteristics of damped reticulated domes are very rare. In paper [
16], the damping ratios and modes of vibration of small domes are analyzed numerically and compared with experimental results. The complex model and the Rayleigh model were used to theoretically describe the damping effects. The damping ratios and natural frequencies are also determined experimentally in [
35] for a small dome supported on the isolation devices. Typical experimental values of damping ratios are of the order 0.002–0.003, according to the paper [
16], and damping ratios of the order 0.01–0.02 are reported in [
35]. Moreover, in the paper [
17], the effects of the nonlinear material loss factor on the damping properties of latticed domes are investigated.
If the passive control system consisting, for example, of VE dampers is installed on the structure, design engineers are also interested in the determination of the modal, non-dimensional damping ratio or the modal loss factors and the frequency response functions (in short, FRFs). The non-dimensional damping ratios (or the modal loss factors) are a measure of the possibility of energy dissipation when the structure vibrates in a particular mode of vibration. The nonlinear eigenvalue problem (NEP), such as the one presented in [
2,
4], must be solved when the above-mentioned damping ratios (loss factors), natural frequencies and modes of vibration are of interest. In this context, Horr et al. [
38,
39] and Lewandowski et al. [
40] proposed a spectral finite element analysis method for structures made of homogeneous (not composite) VE rods.
However, to the best of our knowledge, the dynamic characteristics of reticulated domes with VE elements (VE dampers and/or VE layers on the dome’s rod) are not analyzed at all. The above brief review of the literature clearly shows a lack of a systematic analysis of the dynamic characteristics of reticulated domes. The main aim of this paper is to fill this gap, at least partially. For this reason, and in order to fill this gap, the principal aim of this paper is to propose a new formulation for domes made of rods which are built of two parts, i.e., the first part is made of an elastic material and the second part is made of a VE material. Moreover, the above-mentioned NEP from which the dynamic characteristics can be determined is derived. The continuation method is used for the sole NEP.
The paper is organized as follows. After a short review of the existing open literature in
Section 1, the dynamic analysis of a rod with VE layers is presented in
Section 2. An analysis of the free vibration of the whole dome and a description of the continuation method used to solve NEP are presented in
Section 3.
Section 4 contains an analysis of the steady-state vibration of the dome as well as information on the determination of the FRFs. The results of a representative calculation are presented and briefly discussed in
Section 5. Concluding remarks are found in
Section 6. The paper also contains a few appendices where some detailed derivations are presented.
2. Dynamic Analysis of Viscoelastic (VE) Rods
The considered rod is a composite one. It is built of two parts, one of which is elastic and one is VE. In the context of reticulated domes, typical examples of elastic materials are steel and/or aluminum. The examples of VE materials that can be used to dissipate vibration energy and for which the presented theory is valid are different types of polymers and elastomers. The purely elastic Part #1 has the elastic modulus
and density
. Part #2 is VE with density
, has a much higher loss factor than Part #1 and is modeled with the help of the fractional Zener model. The model consists of four parameters, i.e., the relaxed elastic modulus
and
, the non-relaxed elastic modulus
and
, the relaxation time
and the order of the fractional derivative
(
). Moreover, it is assumed that the Poisson ratio
is constant, i.e., it is independent of the frequency of excitation, the temperature and the amplitude of vibration. Additionally, it is assumed that the relationships between the moduli are
Of course, real “elastic” materials also have loss factors, but, for example, metals have low loss factors (in the order of ), which will be neglected here in comparison with the loss factors of the VE part of the rod.
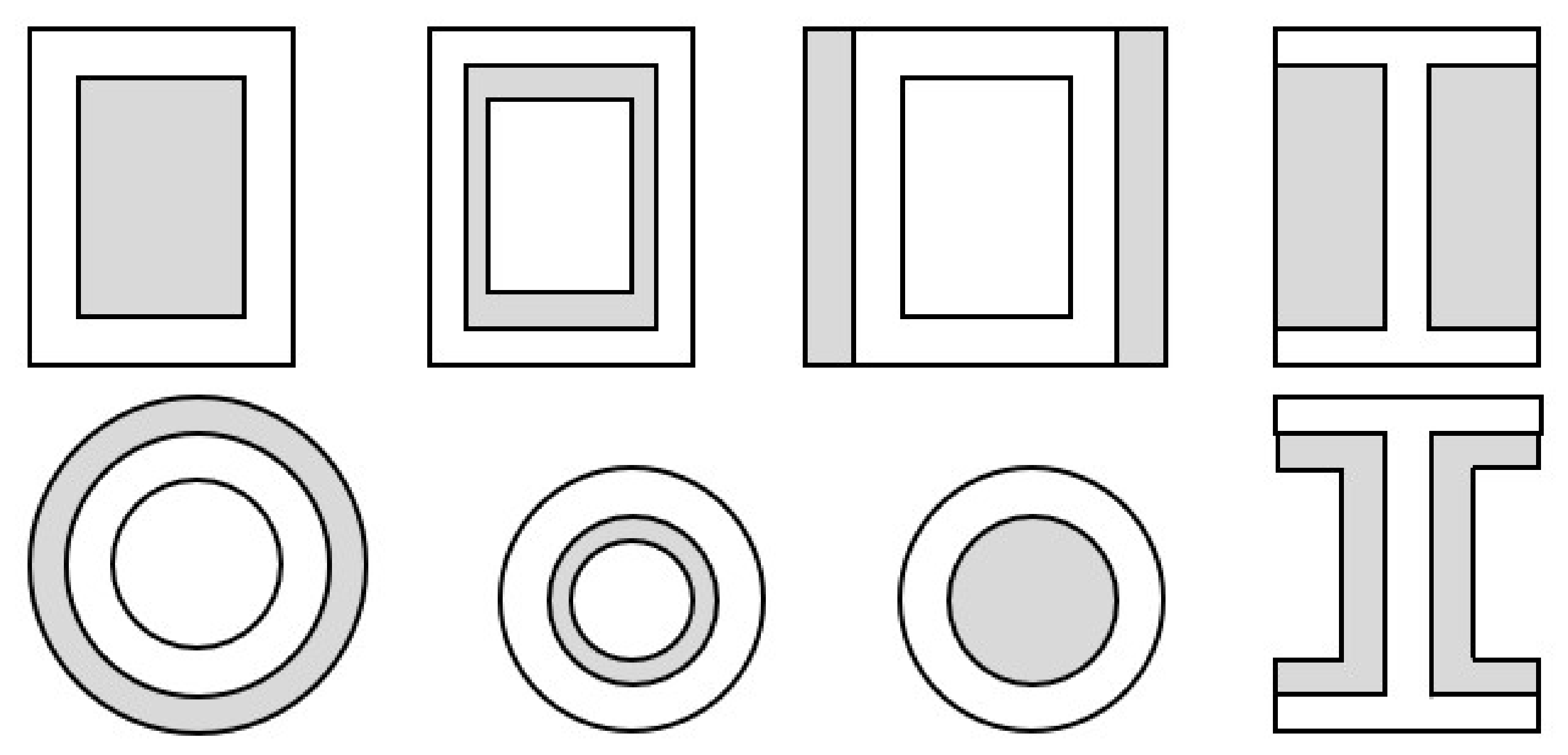
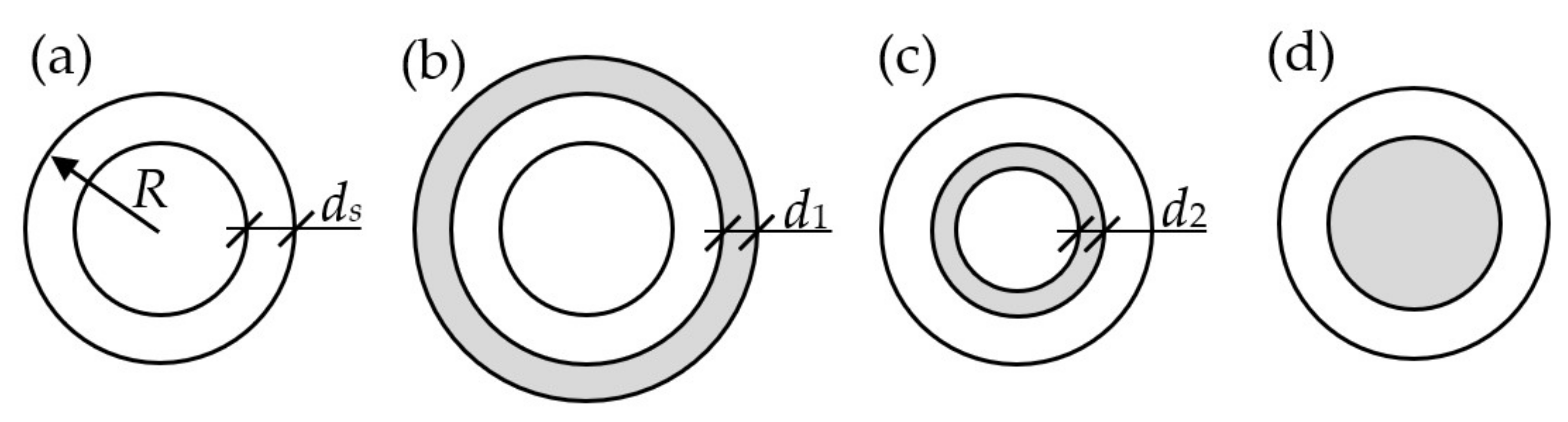
The rod in a three-dimensional space is considered, which could be stretched/pressed, sheared, bended and twisted. For these reasons, the Timoshenko theory is used as the model of the rod. The cross-section of the rod has two axes of symmetry and contains the elastic and the VE parts. It is assumed that the structure built of the elastic part of a rod only is geometrically stable. The interface of the elastic and the VE parts is no-slip. Both parts have the center of gravity in the same point in space. The plane cross-section in each part remains as a plane after deformation. This assumption agrees with the one used in the well-known Ross, Kerwin and Ungar theory (briefly, the RKU theory) [
41,
42]. Moreover, the VE material is rheologically simple, which means that the correspondence principle could be used. All rods in a dome are built of an identical VE material. Examples of the possible cross-section of the VE rods are shown in
Figure 1, where the VE part of the cross-section is shown as the grey area.
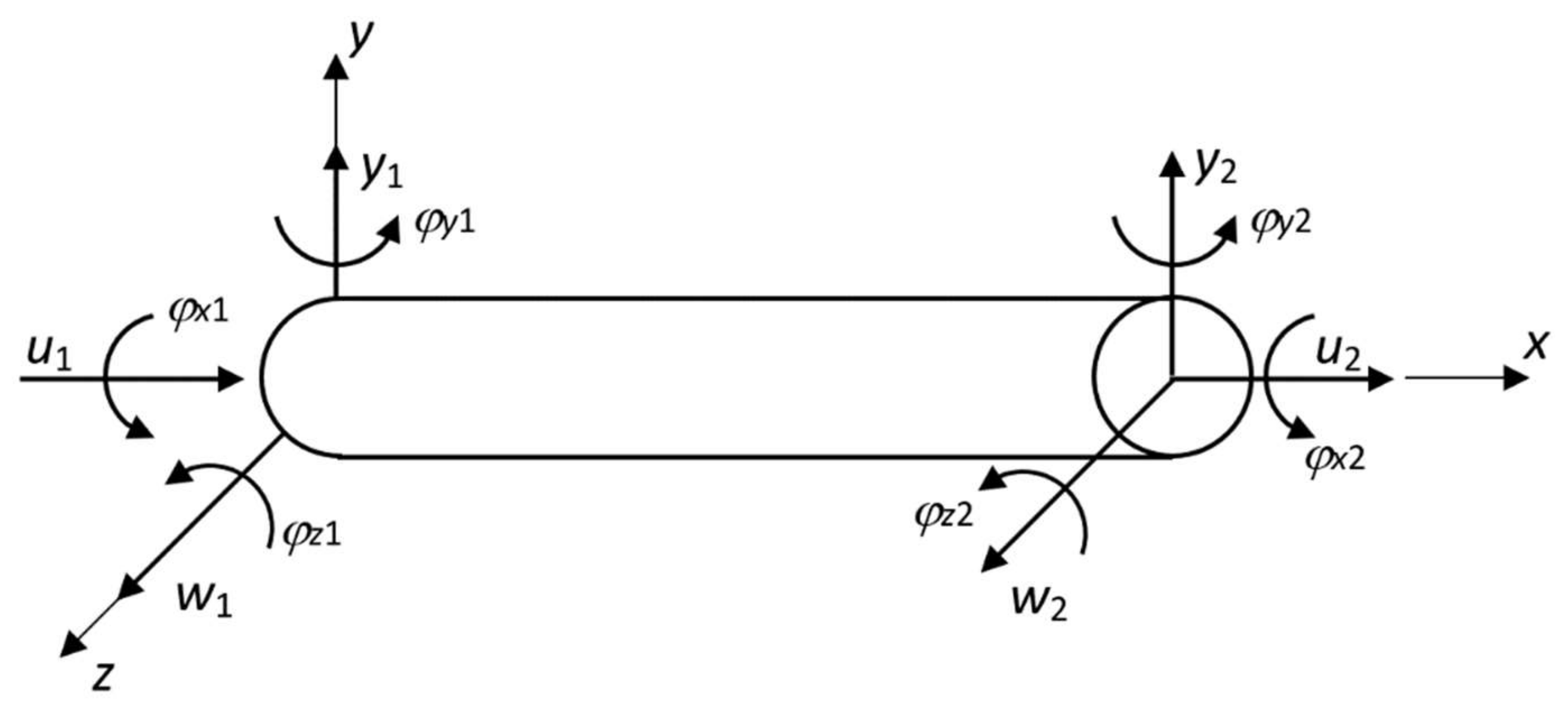
The considered rod in a three-dimensional space is shown in
Figure 2, where the positive end displacements of the rod are also visible. The theory presented in [
43] is adopted to describe the dynamic behavior of the rod. This finite element with six degrees of freedom has three displacements and three rotations (see
Figure 2) at one node. It is assumed that the displacements and the rotations are small. Therefore, the displacements
,
and
of a freely chosen point of the rod can be expressed as [
43]:
where
,
and
are the displacements of the rod axis, and
,
and
are rotations (see
Figure 2 for details).
The nonzero strains for the considered rod are the following functions of displacements and rotations (see [
43]):
where
is the time,
and
,
and
are the displacement of a freely chosen point at the rod axis. Later in this paper, the subscript
is dropped, and
,
and
will be used to denote displacements at the rod axis.
Moreover, the following generalized strains are introduced: the axial strain
, the curvature in the x0y plane
, the curvature in the x0z plane
, the shear strains
and
and the torsional rate
. These quantities are defined as follows:
Based on the quantities introduced above, the vector of displacements
and the vector of generalized strains
are defined. Moreover, the vector of internal forces is introduced:
The symbols in the definition above denote the axial force, the bending moments, the shear forces and the torsional moment, respectively. Definitions of internal forces are given in
Appendix A. It should be noted that the internal forces are a sum of forces in both parts of the rod.
The virtual work equation for the considered finite element is
where the symbol
means that the following quantity
is the virtual one, and
is the length of the element. The vector of inertial forces
per unit length of the element and the vector of excitation forces
are detailed in
Appendix A. Moreover, the vector of nodal forces is denoted by
, and
is the vector of nodal parameters.
Proceeding in a conventional way, the virtual work of inertial forces could be written in the following form
where the matrix
is given by (B6). Details of derivation are presented in
Appendix B.
The analysis of the virtual work of internal forces is more complex because the constitutive equation for the VE material is a fractional differential equation. Details are presented in
Appendix C. Therefore, the virtual work of internal forces can be temporarily written in the following form:
where
is the resultant inertial forces obtained from the VE part of the rod and quantities
are the constitutive matrix connected with the elastic part of the rod.
Two types of dynamic problems of the dome are considered in particular, i.e., the free vibration problem and the steady-state vibration of the dome, excited by harmonically varying forces.
In the case of free vibration
and the Laplace transform (with zero initial conditions) applied to the virtual work, Equation (11) gives the relationship:
where the wave over the quantities means that it is their Laplace transform, and relationships (12) and (C7) are also taken into account.
The finite element method is adopted to discretize displacements, and according to this method:
where
is the vector of the Laplace transform of nodal parameters and
is the matrix of shape functions. Moreover, it is well known that
By introducing (15) and (16) in (14) and remembering that the virtual state can be freely chosen, the following equation is obtained:
where
,
and
are the mass matrix, the elastic stiffness matrix and the VE stiffness matrix, defined as:
It should be noted that the elastic stiffness matrix comprises the influence of both the elastic part of the rod (through matrix ) and the elastic properties of the VE part of the rod (through matrix ).
The commercial program Abaqus, along with the beam finite element B32, is used to calculate the elemental matrices , , and the corresponding global ones.
The steady-state harmonically varied vibration is analyzed because the FRF, which is one of the dynamic characteristics of structures, could easily be obtained. Now, the considered finite element is excited by the harmonically varying forces described as
where
is the angular excitation frequency, and
and
are vectors of the real “amplitudes” of excitation forces. Moreover,
, and
.
Vibrations of the rod in the steady state can be described as follows:
where
and
. In this part of the paper, the bar over the quantity means that it is a complex conjugate one in comparison with the same quantity without a bar.
The time average virtual work equation (instead of (11)) is used in the steady-state analysis. The above-mentioned equation has the following form:
where
is the period of excitation forces.
The time changes of virtual displacements are assumed to be in the form:
The real and virtual generalized strains are discretized as follows:
A detailed analysis of the averaged virtual work equation is presented in
Appendix D. Finally, this equation can be rewritten in the following form:
The virtual displacements could be freely chosen, and, for this reason, Equation (28) is fulfilled when the following two equalities hold:
3. Analysis of the Free Vibration of the Dome
3.1. General Information Concerning NEP
With the elemental Equation (17), and using the well-known finite element procedure, it is possible to obtain the following equation:
for the whole dome, where
is the Laplace transform of the global vector of nodal parameters, and the global mass and stiffness matrices
,
,
are built in the usual way using the elemental matrices
,
,
, defined by (18), (19) and the transformation matrix
from local to global coordinate systems. Moreover,
.
From the mathematical point of view, Equation (31) is the NEP with as the eigenvalue, and the vector , previously described as the Laplace transform of , is now treated as the eigenvector.
In general, eigenvalues can be complex numbers or real numbers. Similarly, eigenvectors can also be complex or real vectors. When the VE properties of a material are described with the help of the fractional Zener model, it can be proved that eigenvalues and eigenvectors that are the solution to (31) are only the complex eigenvalues and eigenvectors [
4,
44]. The NEP (31) has
solutions, where
is the number of the degree of freedom of the dome. Only a few initial solutions are interesting from the practical point of view.
If there is a complex solution, then there is also a complex, conjugate solution coupled with it, i.e., if the solution is and , where and are real vectors, then the solution is also and . Moreover, in all cases, .
The solution to NEP is not an easy task. However, there are a number of methods to solve the problem. An interesting survey of NEP associated with matrix-valued functions which depend nonlinearly on a parameter is presented in [
44,
45,
46]. A few methods based on successive linearization were proposed by Ruhe in [
47] in order to solve the NEP problem. In [
48], Singh proposed a method to solve NEP based on Newton’s eigenvalue iteration. An asymptotic method to solve NEP and calculate the dynamic characteristics of a VE system is proposed in [
49]. Moreover, the continuation method, also known as the homotopy method, is used in [
4,
50,
51,
52,
53] to solve NEP arising in the dynamics of VE systems. An iterative algorithm, a first-order perturbation method and a reduced basis technique are used by Chen et al. [
54] to solve the NEP. In [
55], two iterative algorithms to solve NEP were developed. These methods combine homotopy, the asymptotic numerical technique and Padé approximants. Recently, a new iterative method which used first-order perturbation was proposed in [
56] for the determination of the eigenvalues and eigenvectors of nonviscously damped vibration systems. However, for large NEP, the direct use of the continuation method for a set of eigenvalues and eigenvectors is time-consuming. One possible way to reduce the total computation time is to reduce the NEP order before proceeding to its solution. For this reason, an application of the subspace iteration method to solve NEP is proposed, as described in [
57,
58].
Two versions of the continuation method, described below, were adopted to solve the considered NEP.
3.2. The Classical Continuation Method for NEP
The classical continuation method adopted to solve NEP (31) was previously successfully used in [
4,
40,
50,
52] and will be briefly repeated here for the reader’s convenience and for the completeness of the description of the numerical procedure.
In (31), there are n equations with n + 1 unknowns, and, for this reason, an additional equation called the constraint equation, assumed here in the form
must be added, where
The constraint equation can also be understood as a way of normalizing the vector .
The artificial continuation parameter
is now introduced, and Equations (31) and (32) are rewritten in the form of
It should be noted that, for
, (35) reduced to the following linear eigenvalue problem:
while, for
, (35) is identical with (31). The idea of the continuation method is to create a series of solutions of (35) for different values of
, starting from
and ending the continuation process at
.
There are many efficient numerical procedures and commercial programs which can be used to efficiently solve the linear eigenvalue problem (37). From the practical point of view, only the first few eigenvalues and eigenvectors of (37) are of interest. One is for the chosen eigenvalues
and the corresponding eigenvector
, where
and
are the natural frequency and the mode of vibration of the dome for which elastic properties are taken into account. These quantities are the starting approximation of NEP (31) for
, which is denoted by
where the lower index in (38) indicates that it is the solution to (35) for
.
Let us assume that the solution to (35), denoted as and , is known for some specific value of the continuation parameter denoted as . Our aim is to obtain the solution to NEP (35) for the next values of the continuation parameter, i.e., for , where is the assumed increment of the continuation parameter.
In the considered incremental step, a set of nonlinear equations, (35) and (36), must be solved. This is usually solved with the help of the Newton method. The Newton method is an iterative one which requires the updating of the tangent matrix in each iteration. During the iteration process, it is assumed that, at the beginning of iteration number
, we know some approximation of the searched solution denoted here by
,
, and our aim is to determine a better approximation of the solution. According to the Newton method, the following set of linearized equations must be solved with respect to
and
:
where
A next approximation of the searched solution is given by:
The iteration is repeated until the following inequalities are fulfilled:
where
and
are the assumed accuracies of calculations. The last obtained approximation of the NEP solution is the searched solution for
, i.e.,
,
.
The incremental process is repeated until the solution to (35) for is obtained, which is also the solution to NEP (31).
With the eigenvalue
, the corresponding natural frequency
and damping ratio
could be calculated from
In this way, one solution to NEP (31) is found, and the natural frequency and damping ratio can be calculated.
The incremental–iterative process described above must be repeated if more solutions are required.
3.3. The Continuation Method Proposed by Jarlebring et al. [59]
Some improvements in the Newton iterative procedure used to solve NEP were proposed by Jarlebring et al. in [
59], where a quasi-Newton procedure is used instead of the full Newton approach.
The above-mentioned procedure was successfully applied in [
60] and will be adopted here as one element of the continuation method used to solve NEP (31). First of all, the so-called continuation parameter,
(
), is introduced, and NEP (31) is rewritten in the form of Equation (35).
In the method described here, the constraint equation is chosen in the following form:
where
is the assumed vector and
is the known constant whose value will be specified later. Very often,
is a unit vector or
, where 1 is in a freely chosen position in
.
Let us assume that the solution to (35), denoted as and , is known for some specific value of the continuation parameter denoted as . As in the previously presented method, our aim is to obtain the solution to NEP (35) for the next values of the continuation parameter, i.e., for , where is the assumed increment of the continuation parameter.
In the considered incremental step, a set of nonlinear equations, (35) and (45), must be solved now. It is usually solved with the help of the “full” Newton method. The “full” Newton method is an iterative one which requires the updating of the tangent matrix in each iteration. During the iteration process, it is assumed that, at the beginning of iteration number
, we know some approximation of the solution sought, which is denoted here by
,
, and our aim is to determine a better approximation of the solution. According to the “full” Newton method, the following set of linearized equations must be solved with respect to
and
:
In [
59], Jarlebiring et al. proposed some improvements of the “full” Newton method which save a considerable amount of computational time. The main idea is to calculate the matrix
only once at the beginning of the iterative process and keep this matrix unchanged during the iteration process. This means that we have the matrix
in the place of
for all iterations. Moreover, the set of Equations (46) is solved in the specific way described below.
After the above-mentioned change in Equation (46)(1) and the multiplication of (46)(1) by
, we obtain
The first term of (47) could be rewritten as
and is equal to zero because of the way of normalizing the eigenvector
. This also means that, from (47), we obtain
With , it is possible to calculate a new approximation of the eigenvalue, i.e., .
Formula (48) is numerically performed in such a way that, first of all, the additional vector
is determined as a solution to the following equation:
and after that, (48) can be rewritten in the following form:
Now, after the multiplication of (46.1) by
, and taking into account that
, a new approximation of the eigenvector
is obtained from the following formula:
where
It should be noted that, in (53), there appears the actual iterative change of the eigenvalue , which is determined from (48) or (50).
In order to avoid the inversion of the matrix
, relationship (51) could be written in the following form:
After each iteration, the actual approximation of the eigenvector (i.e., vector ) obtained from (52) must be normalized in order to fulfill the normalization criterion (45).
The iteration is repeated until the inequalities (43) are fulfilled. The last-obtained approximation of the NEP solution is the solution sought for , i.e., .
The incremental process is repeated until the solution to (46.1) for is obtained, and it is also the solution to NEP (31). The corresponding natural frequency and damping ratio could be calculated from (44). As in the previous method, the incremental–iterative process described above must be repeated if more solutions are needed.
4. Analysis of the Steady-State Vibration of the Dome and the Determination of Frequency Response Functions (FRF)
In the analysis of steady-state vibration, the global amplitude equations are obtained using the well-known finite element procedure and using the elemental Equations (29) and (30). The final results are
where the global matrices
,
and
are generated in the usual way using the elemental matrices
,
and
, respectively, and the transformation matrix
from the local coordinate systems to the global one. The global vectors of the “amplitudes” of the excitation forces
and
are generated using the elemental vectors of the “amplitudes” of the excitation forces
and
. Moreover,
and
are the global vectors of complex, conjugate vectors of the “amplitudes” of nodal parameters, whereas the quantities
and
are defined in
Appendix D.
It should be noted that only one of Equation (55) or (56) must be solved, because the above-mentioned vectors and are complex and conjugate. For the given excitation forces, the response curves are obtained by solving the amplitude equation for a set of excitation frequencies taken from the assumed range of .
If, for a specific value of excitation frequency, vectors
and
are known, then the steady-state solution can also be written in terms of trigonometric functions, i.e.,
where
and
.
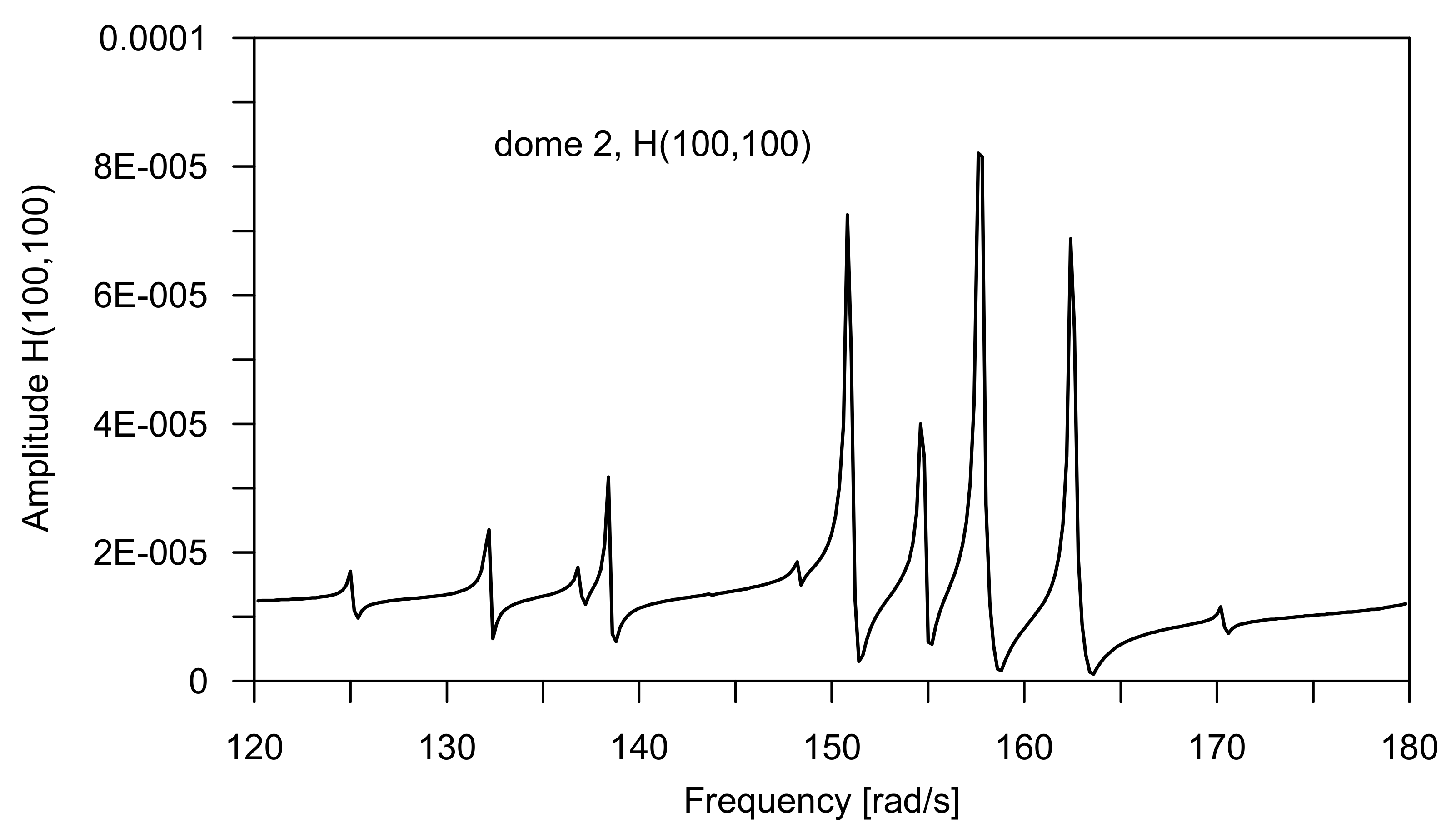
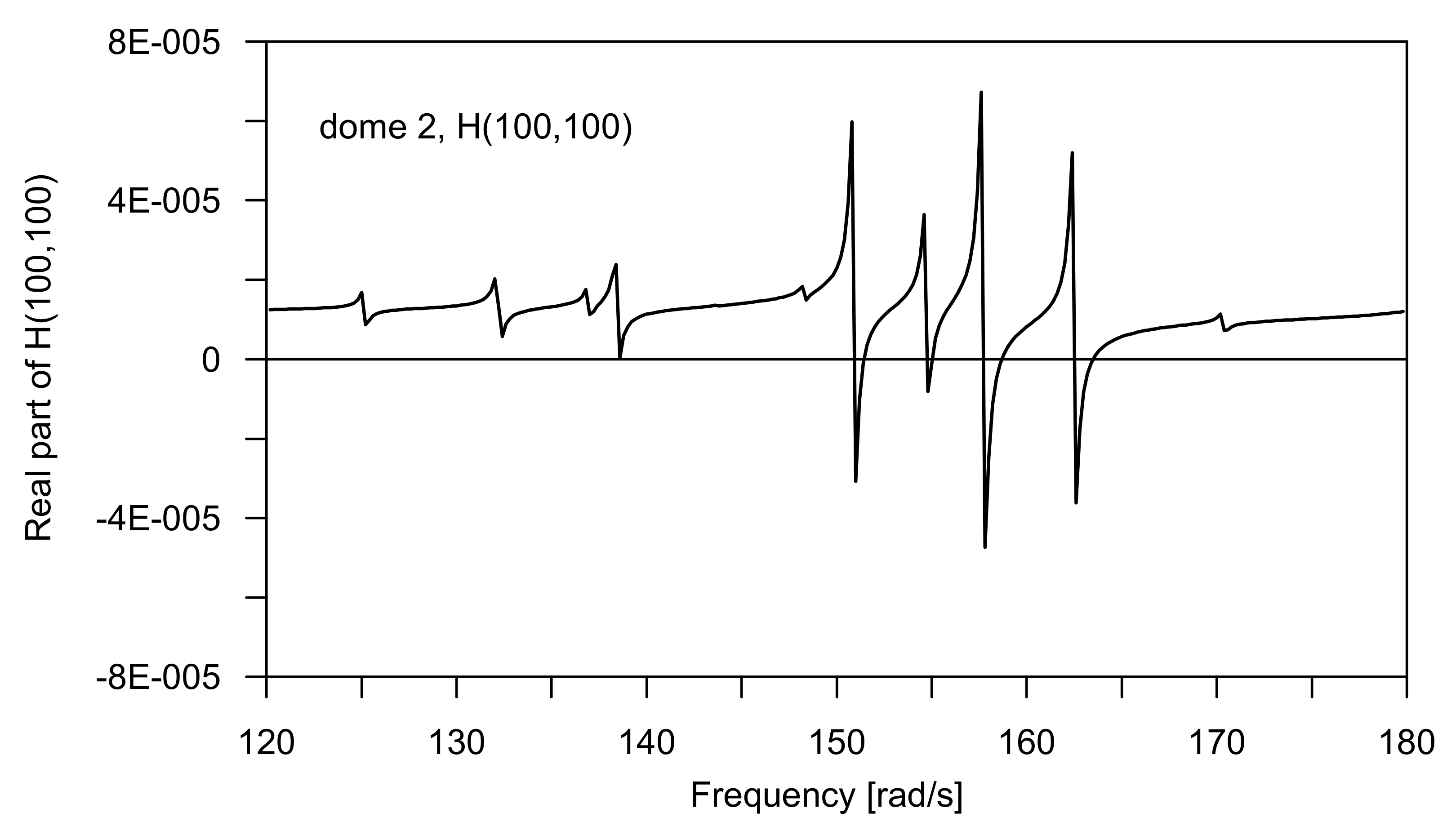
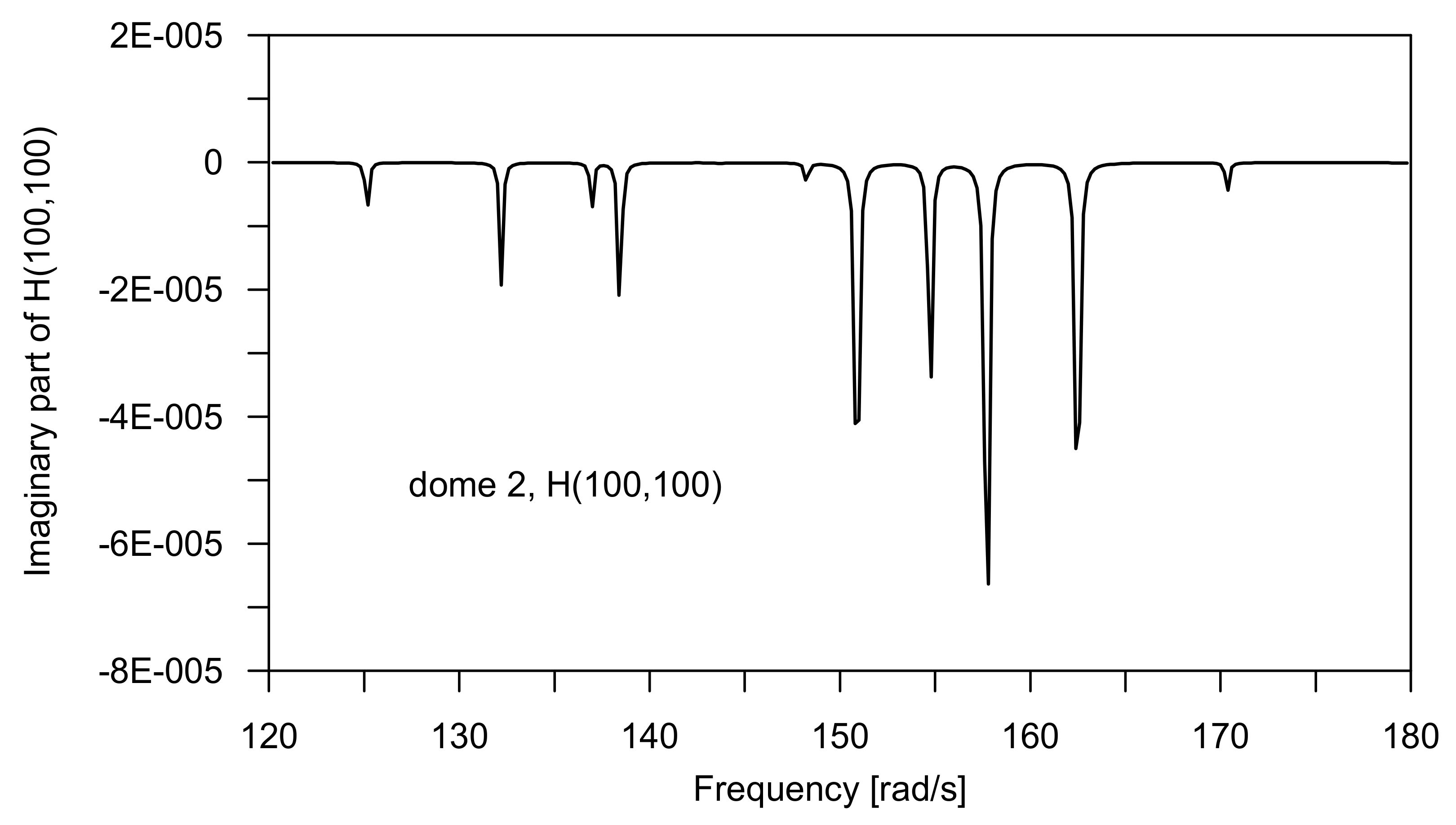
Besides natural frequencies, damping ratios and modes of vibration, the FRFs are also important dynamic characteristics of each structure. When FRFs are of interest, the excitation forces are assumed to be in the form
and the solution to Equation (56) could be written as
where
is the searched matrix of FRF.
Element of the matrix FRF is the displacement of the i-th degree of freedom of the structure at hand, subjected to the unit’s harmonically varying force at the j-th degree of freedom.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}