
Big Data-Based Performance Analysis of Tunnel Boring Machine Tunneling Using Deep Learning

Abstract
:1. Introduction
2. Methodology
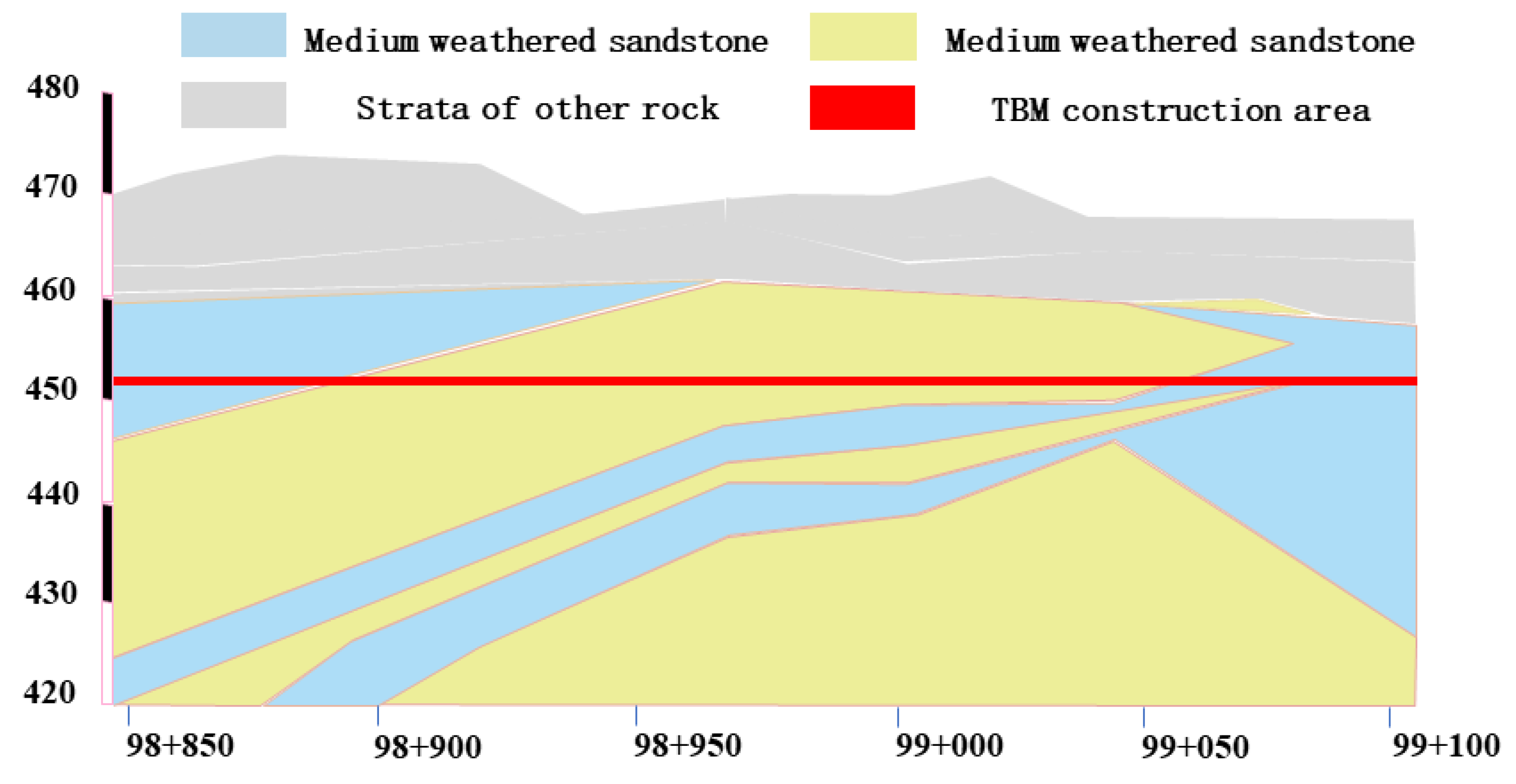
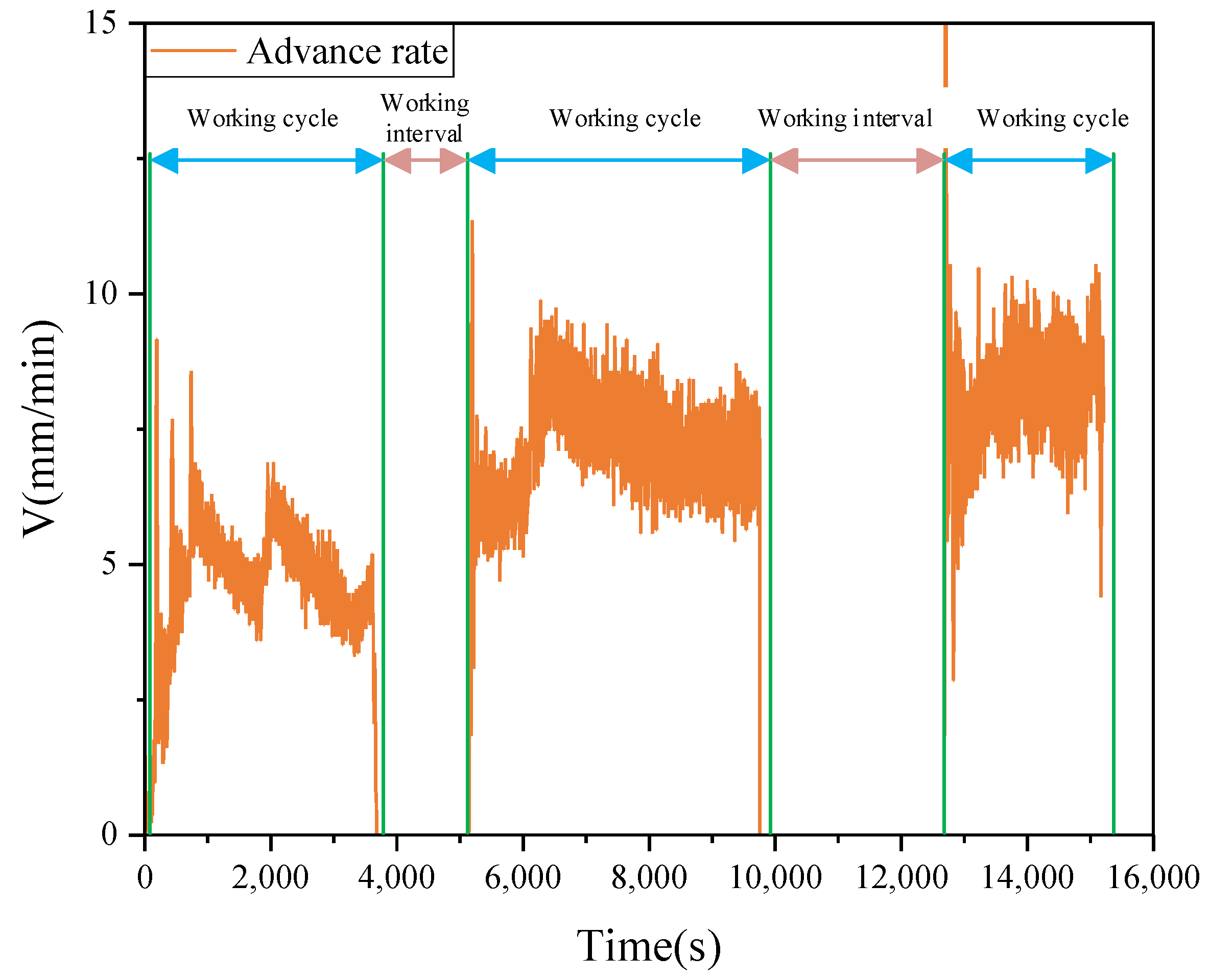
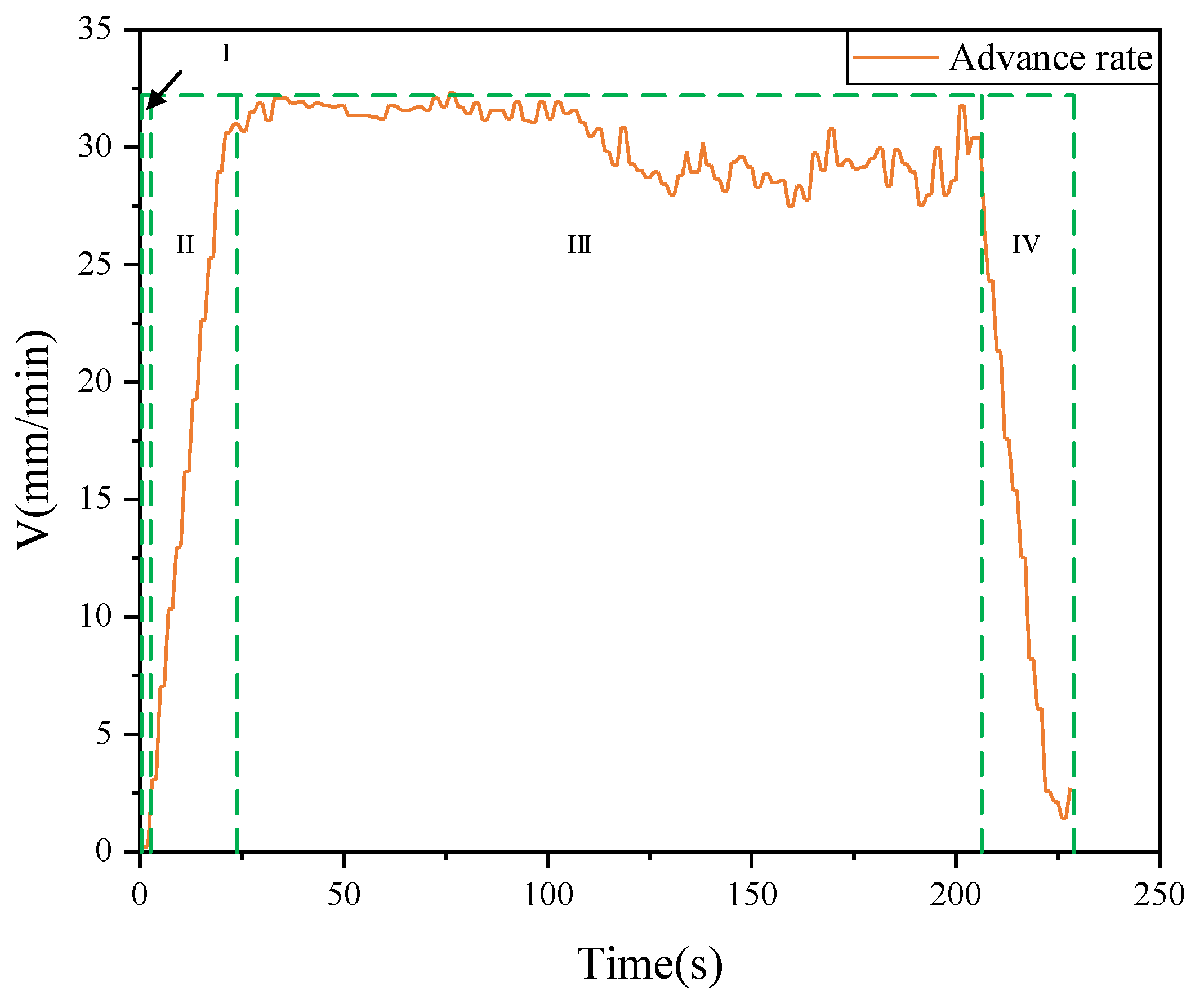
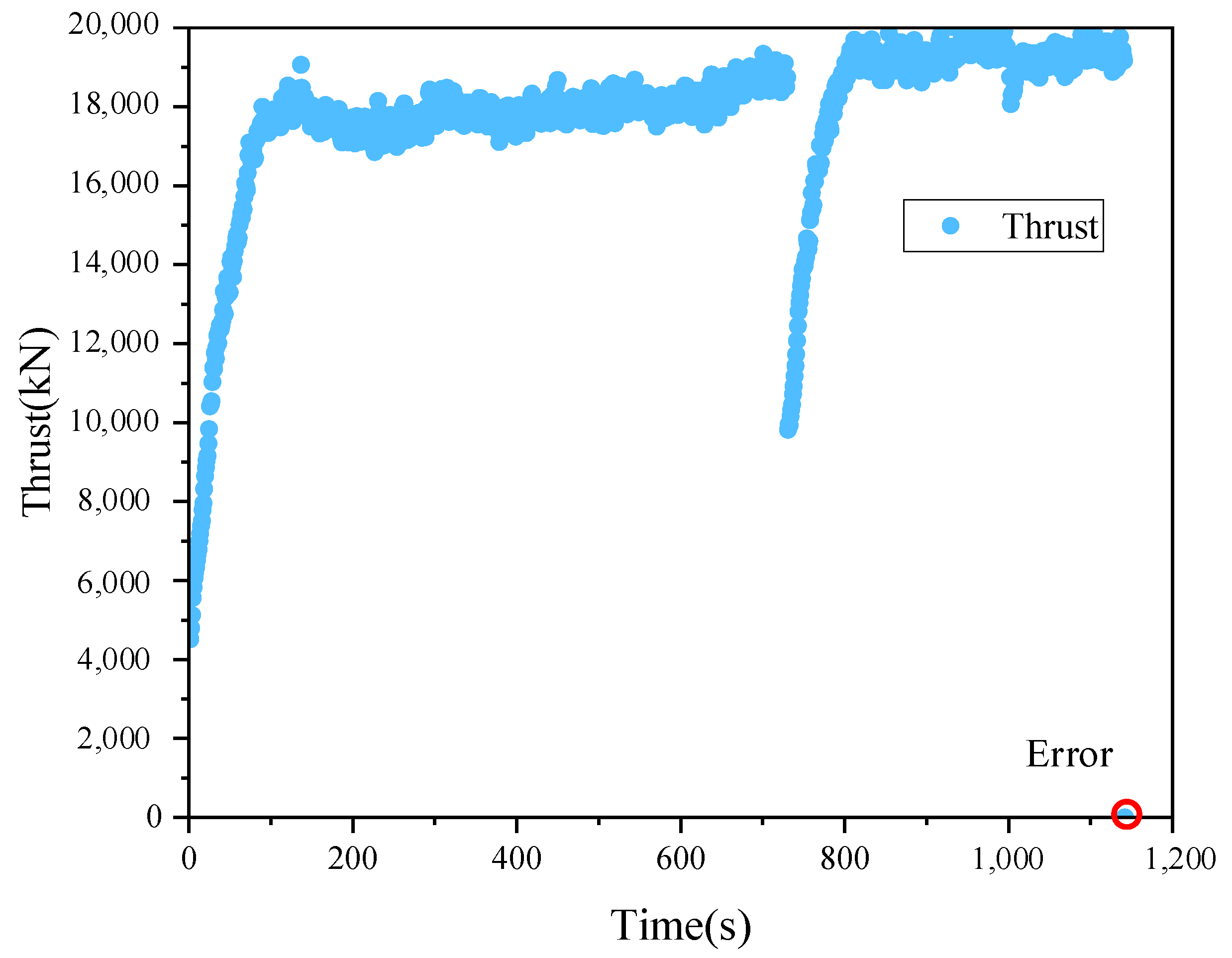
- In step 1, the monitored data was collected using different types of sensors installed on the TBM. The construction data in the strata of medium-weathered sandstone was adopted to train the model. The monitored data sequence for free rotation was also cut in the working process. The error in the monitored data was also detected, and the errors in the data sequence were processed. Normalization was also adopted to scale the data into the range of (0,1).
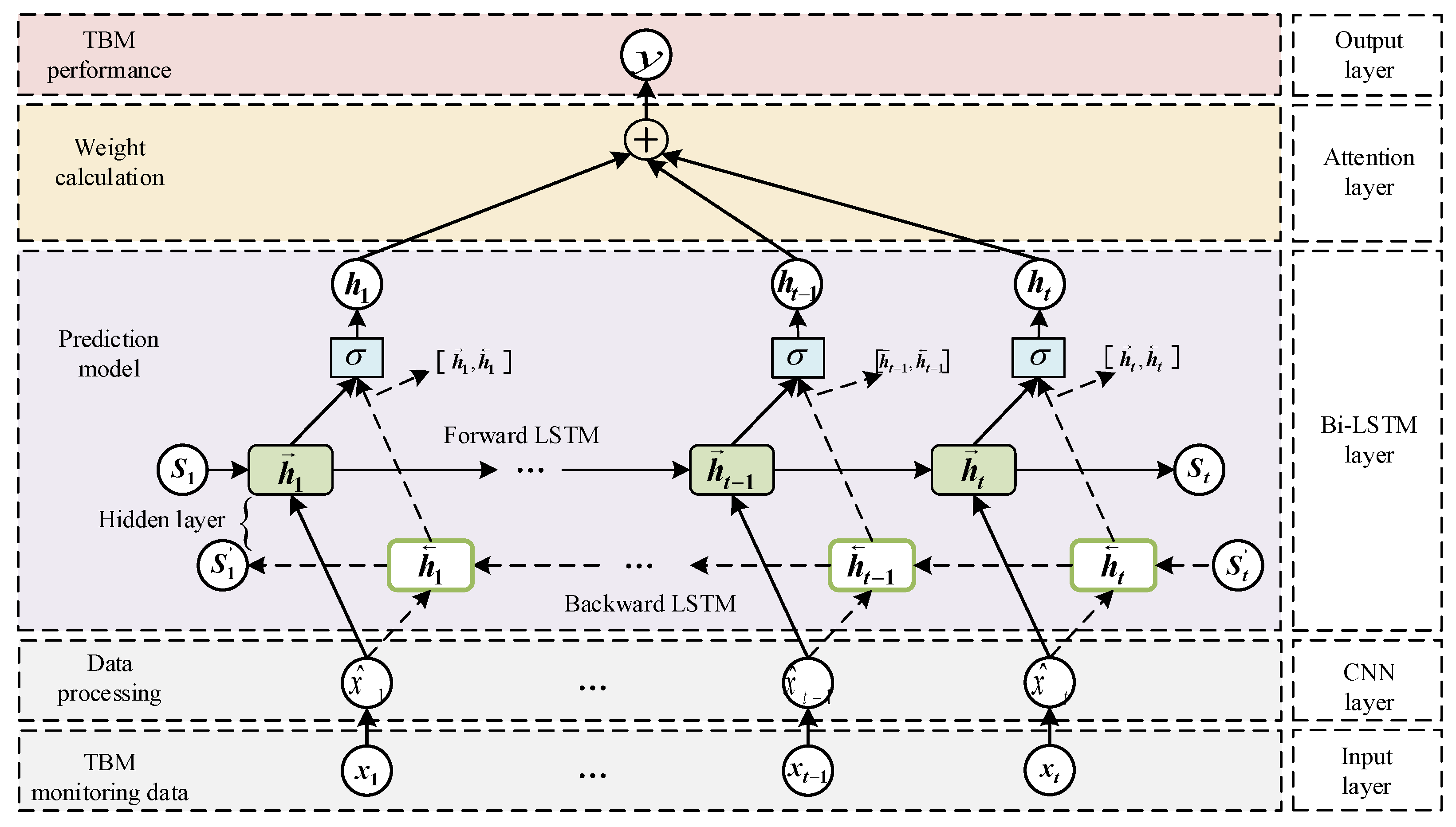
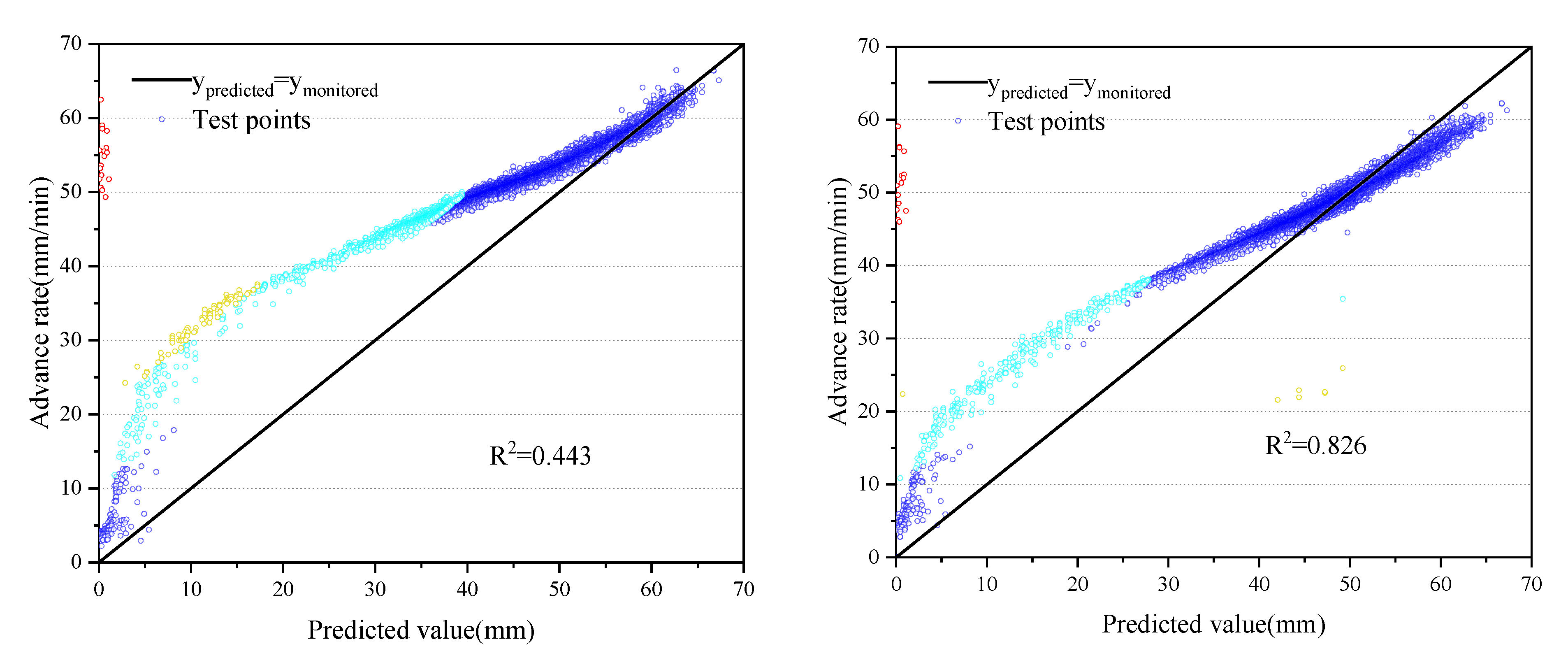
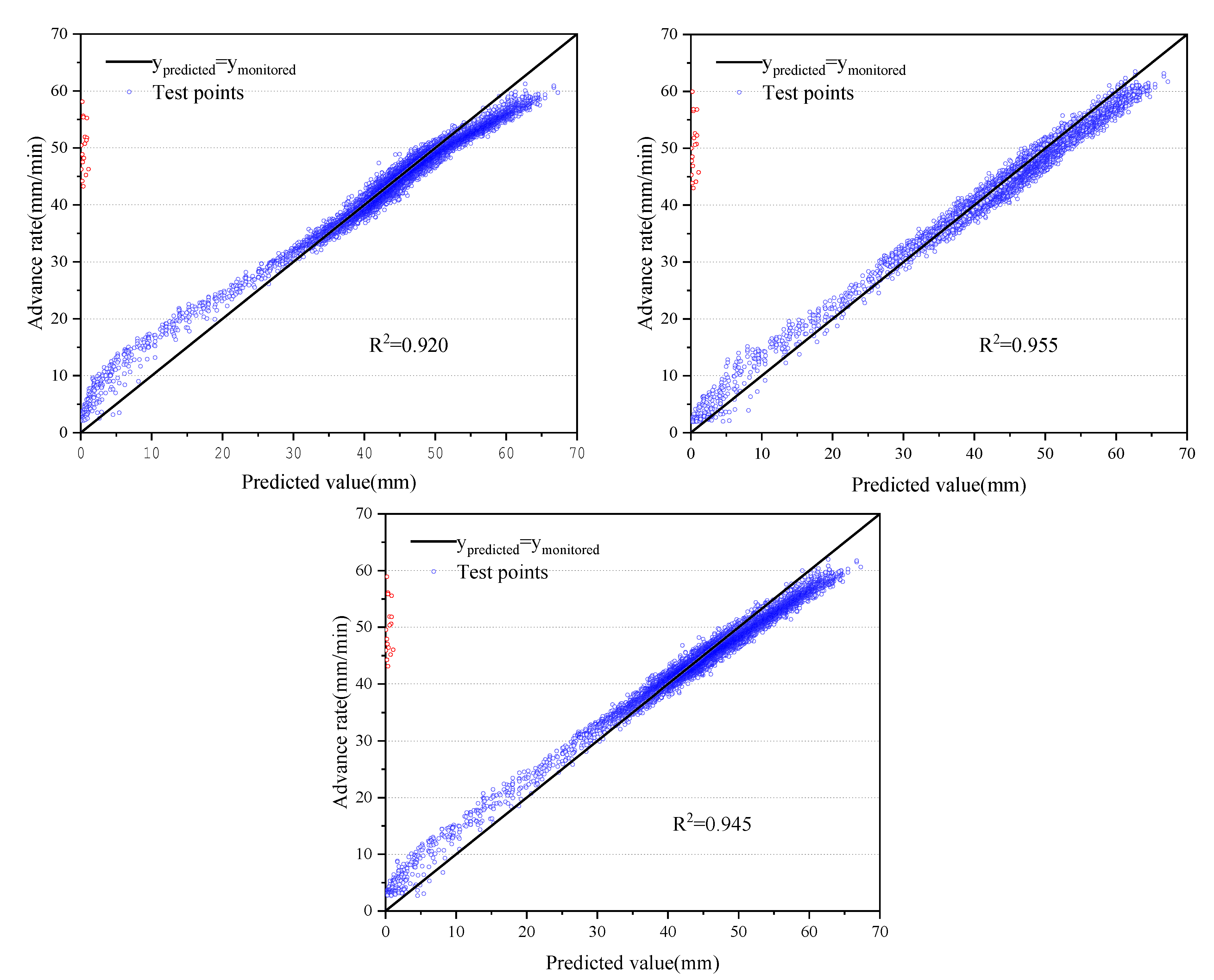
- In step 2, the CNN-Bi-LSTM-Attention model was established using the CNN architecture, bidirectional Long Short-Term Memory module, and the attention mechanism. The CNN architecture was adopted to extract global features from the data sequence. The Bi-LSTM module was adopted to get the time-dependent features. The attention mechanism was used to address the local features, which was significant for the TBM advance rate prediction. Root mean square error (RMSE), Mean absolute error (MAE), and R2 were used to evaluate the models. The comparison of the predicted result and the monitored data are also shown.
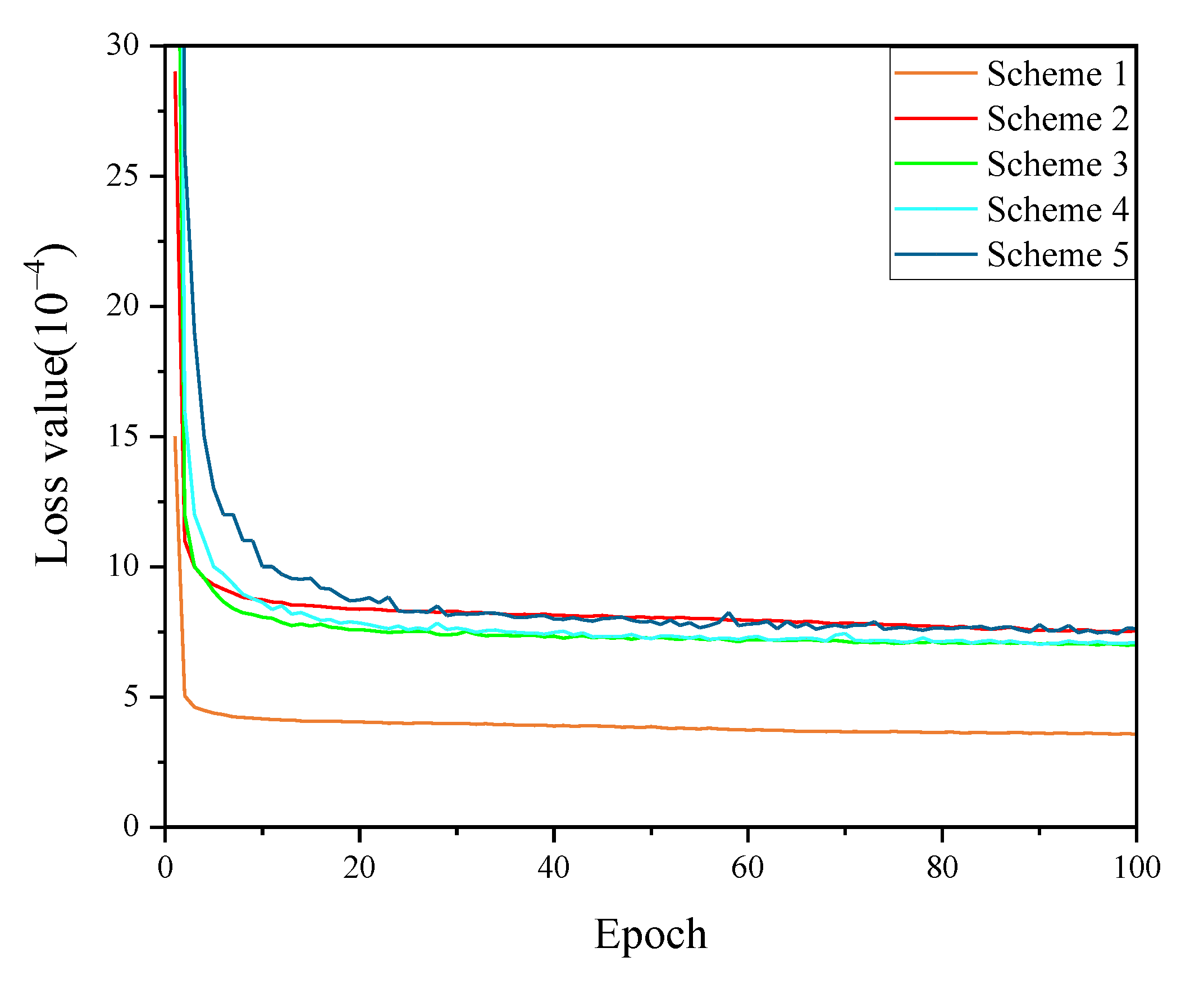
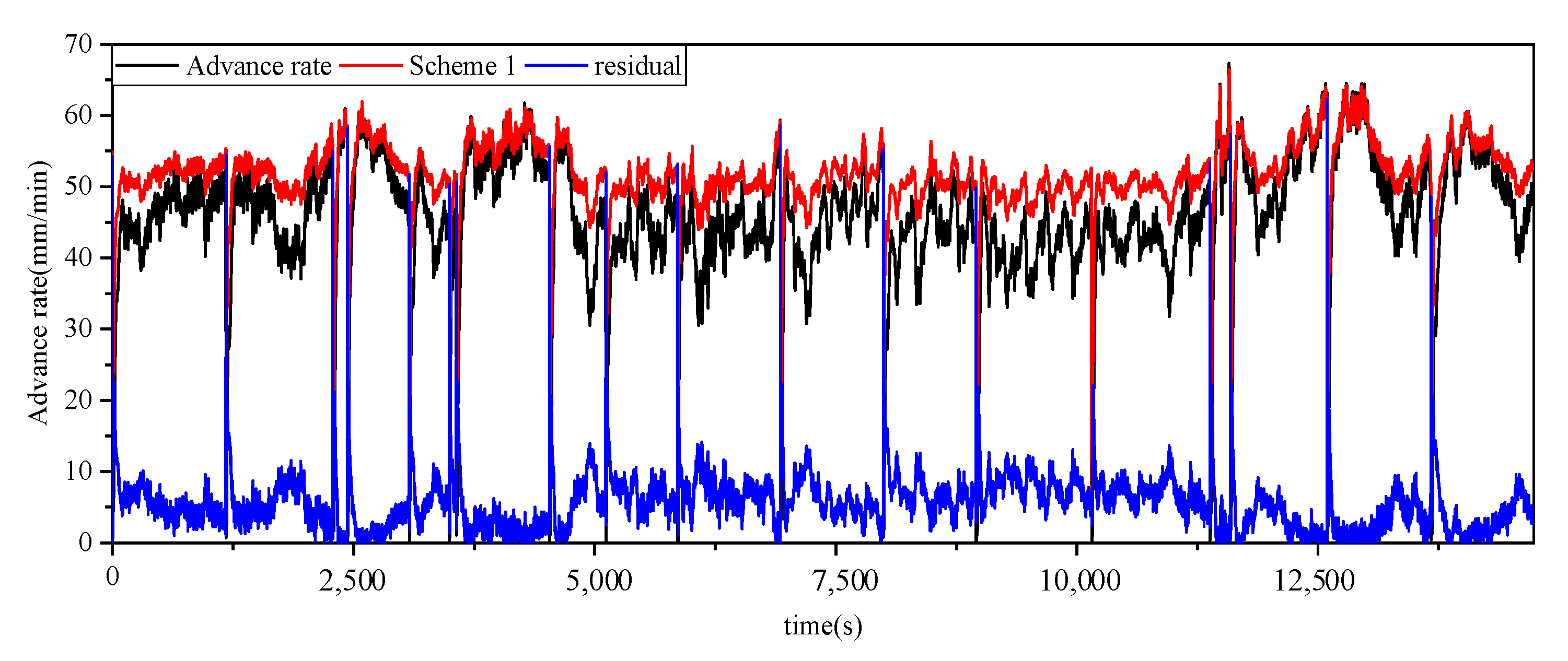
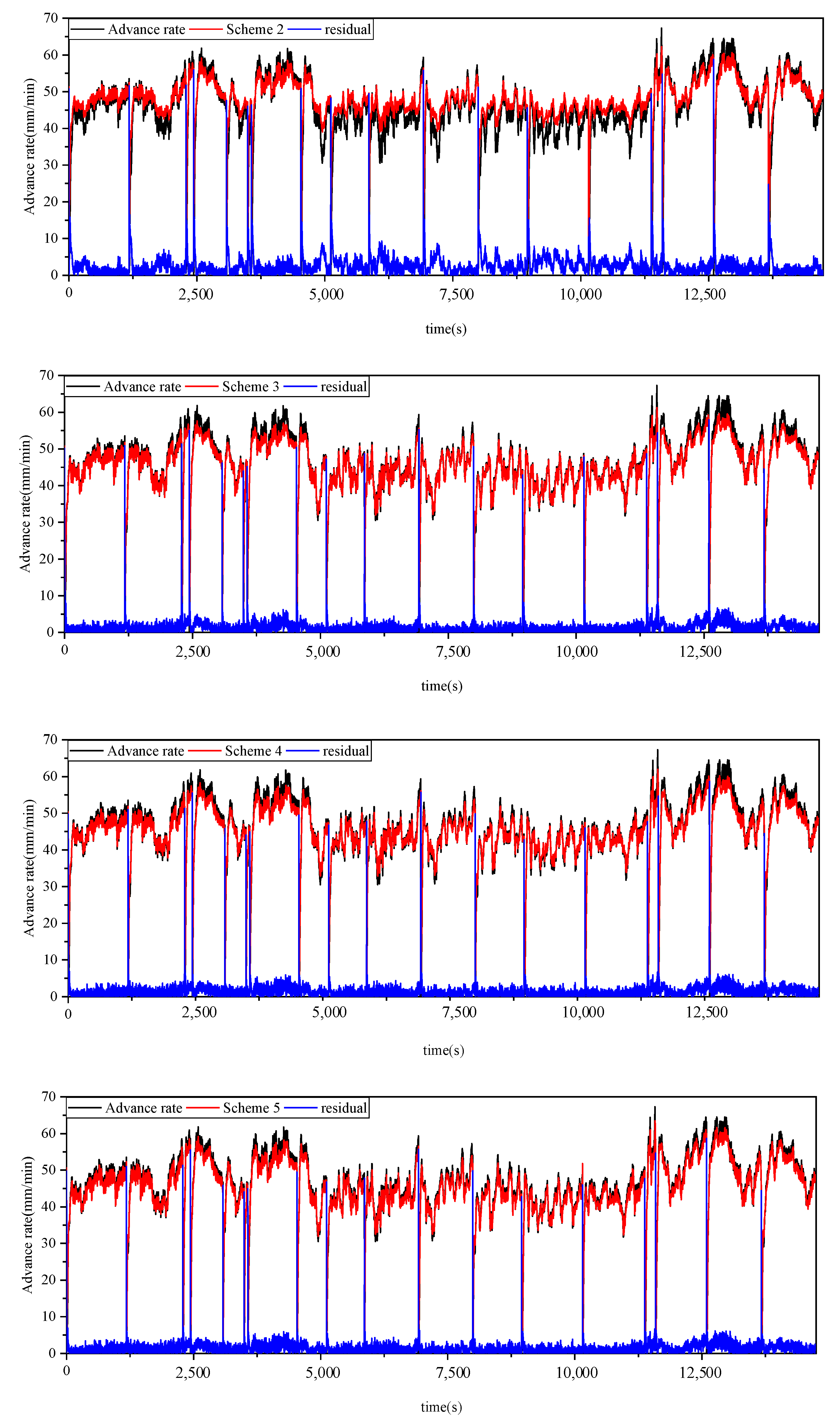
- In step 3, the monitored data from Day 1 to Day 27 was applied. The monitored data of Day 27 were taken as the test data. The training data periods were considered in model training. The data of Day 1-Day 26, Day 20-Day 26, Day 24-Day 26, Day 25-Day 26, and Day 26 were used to train the model. The different schemes of model training were used to evaluate the effectiveness of the data amount and periods. The comparison between the monitored advance rate and the predicted values shows the performance of the different models and where the errors appear in the corking cycle of the TBM.
2.1. CNN
- Local connection: The kernels of the CNN layer are only connected to specific ones of the previous layer, which can obtain the effective features of the sequence.
- Weight sharing: The feature map of the input sequence is processed by the same kernel using sliding windows. Therefore, all the neurons of the same kernel share the same parameters, which reduces the time of the training process.
- Pooling layers: Pooling denotes some or all features based on the values. It is implemented in the low- and high-level features integration process.
2.2. Bi-LSTM-Attention
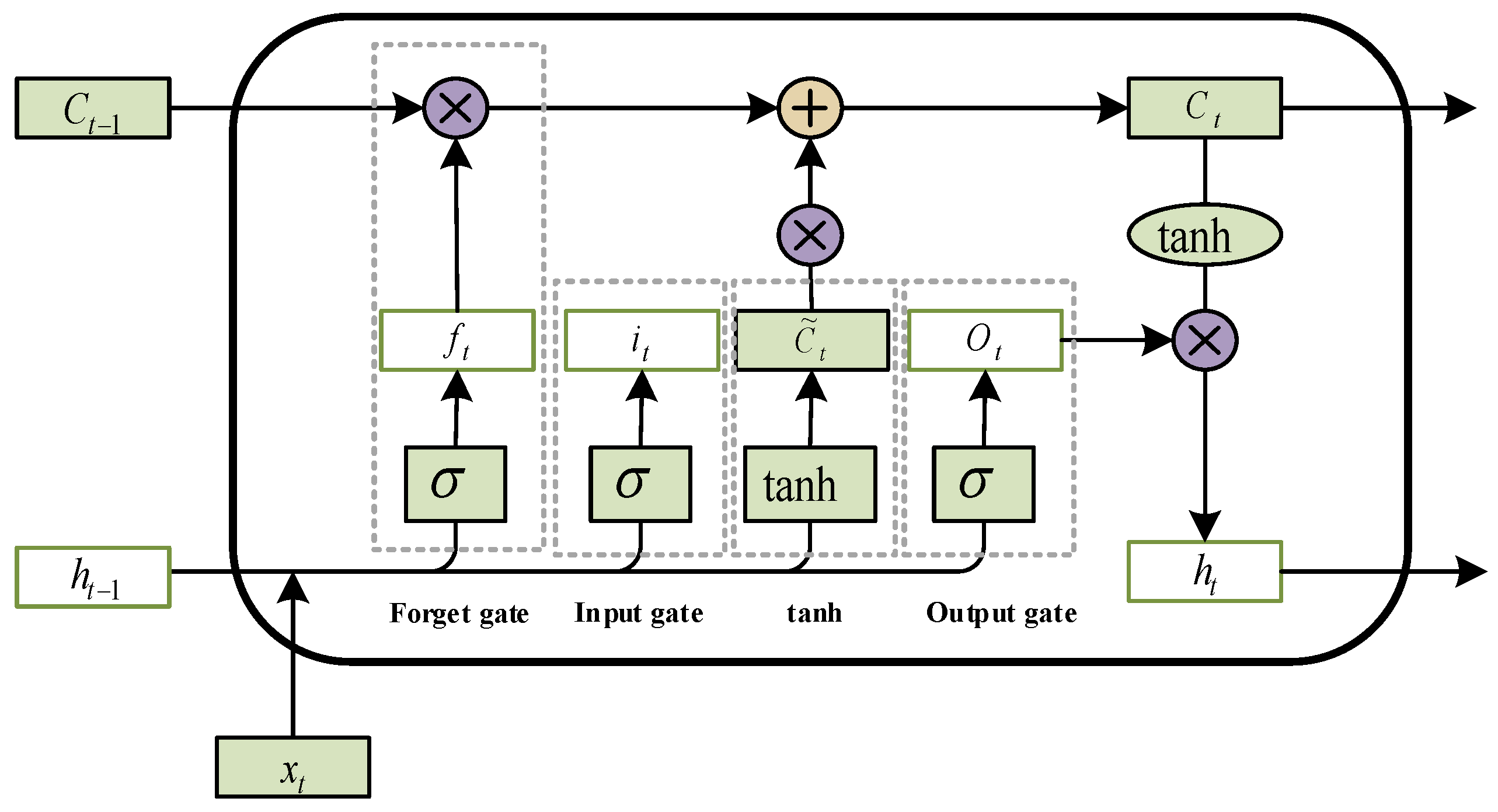
2.2.1. Long Short-Term Memory (LSTM)
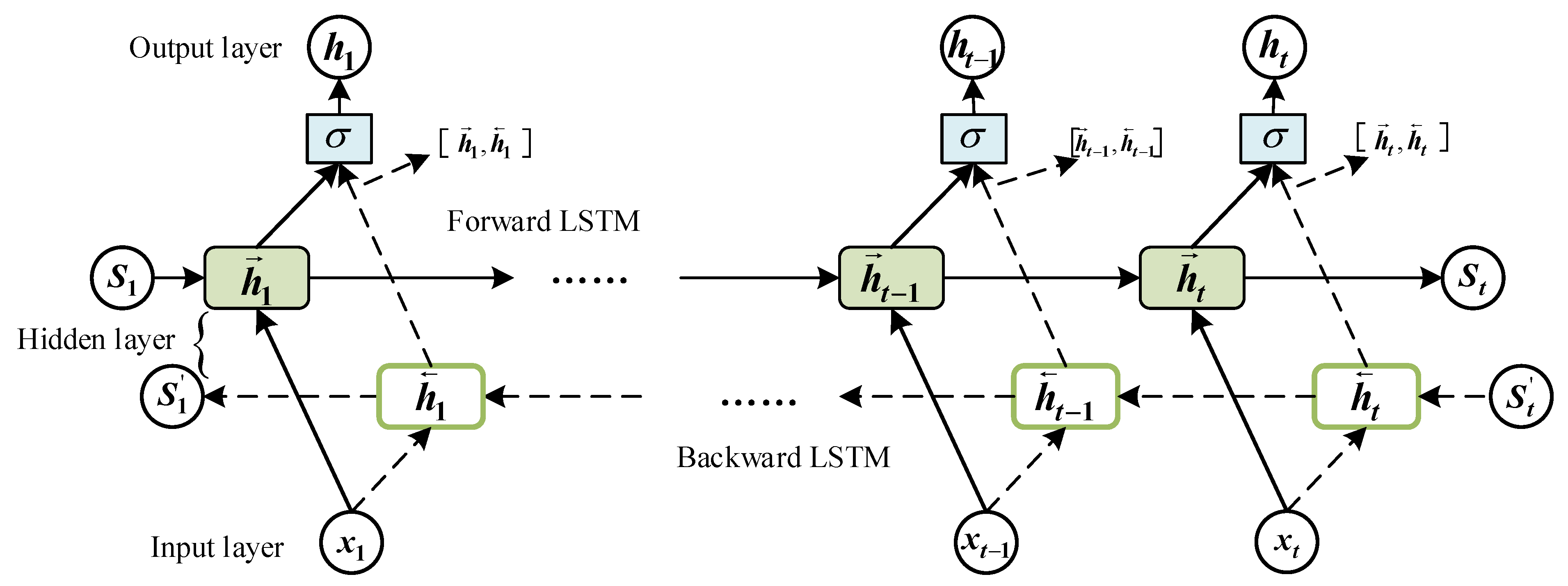
2.2.2. Bi-LSTM-Attention
2.3. Normalization and Model Evaluation Metrics
3. Modeling and Results
3.1. Engineering Project Review
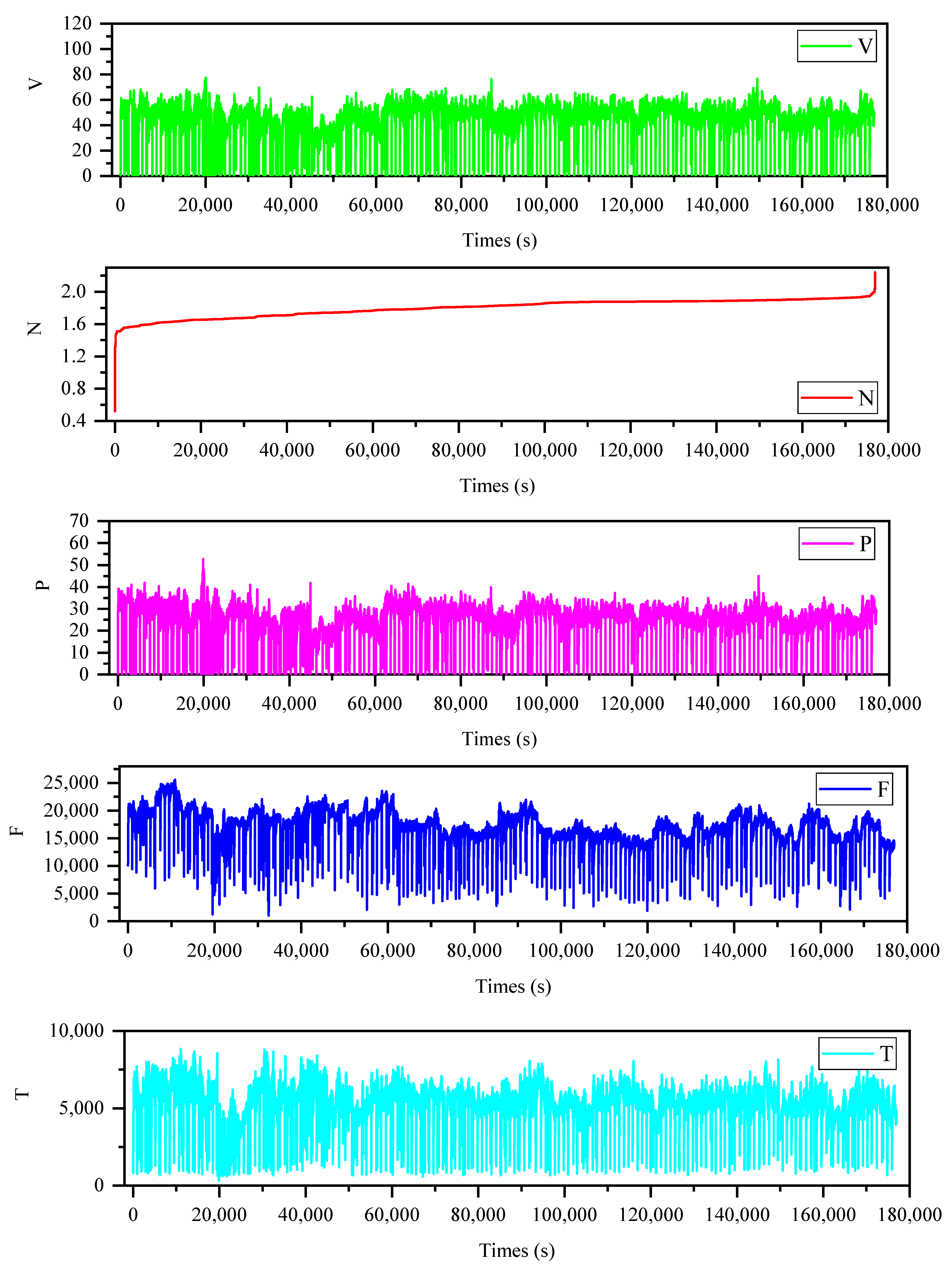
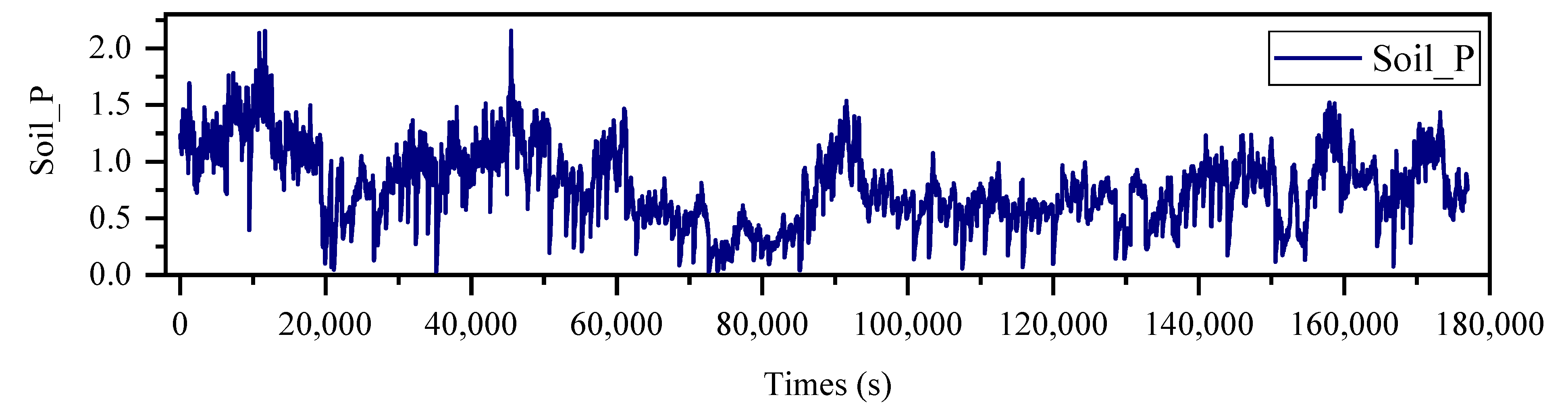
3.2. Data Profile and Preprocessing
3.3. Model Establishment and Evaluation
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, H.; Liu, X.; Song, K. A novel gradient boosting regression tree technique optimized by improved sparrow search algorithm for predicting TBM penetration rate. Arab. J. Geosci. 2022, 15, 1–15. [Google Scholar] [CrossRef]
- Yang, H.; Wang, H.; Zhou, X. Analysis on the rock–cutter interaction mechanism during the TBM tunneling process. Rock Mech. Rock Eng. 2016, 49, 1073–1090. [Google Scholar] [CrossRef]
- Zeng, J.; Roy, B.; Kumar, D.; Mohammed, A.S.; Armaghani, D.J.; Zhou, J.; Mohamad, E.T. Proposing several hybrid PSO-extreme learning machine techniques to predict TBM performance. Eng. Comput. 2021, 1–17. [Google Scholar] [CrossRef]
- Barton, N.R. TBM Tunnelling in Jointed and Faulted Rock; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Blindheim, O.T. Boreability Predictions for Tunneling; The Norwegian Institute of Technology: Trondheim, Norway, 1979. [Google Scholar]
- Bruland, A. Hard Rock Tunnel Boring; Fakultet for Ingeniørvitenskap og Teknologi: Trondheim, Norway, 2000. [Google Scholar]
- Sapigni, M.; Berti, M.; Bethaz, E.; Busillo, A.; Cardonee, G. TBM performance estimation using rock mass classifications. Int. J. Rock Mech. Min. Sci. 2002, 39, 771–788. [Google Scholar] [CrossRef]
- Kahraman, S.; Bilgin, N.; Feridunoglu, C. Dominant rock properties affecting the penetration rate of percussive drills. Int. J. Rock Mech. Min. Sci. 2003, 40, 711–723. [Google Scholar] [CrossRef]
- Hassanpour, J.; Rostami, J.; Khamehchiyan, M.; Bruland, A. Developing new equations for TBM performance prediction in carbonate-argillaceous rocks: A case history of Nowsood water conveyance tunnel. Geomech. Geoengin. Int. J. 2009, 4, 287–297. [Google Scholar] [CrossRef]
- Kasper, T.; Meschke, G. On the influence of face pressure, grouting pressure and TBM design in soft ground tunnelling. Tunn. Undergr. Space Technol. 2006, 21, 160–171. [Google Scholar] [CrossRef]
- Gong, Q.M.; Zhao, J. Development of a rock mass characteristics model for TBM penetration rate prediction. Int. J. Rock Mech. Min. Sci. 2009, 46, 8–18. [Google Scholar] [CrossRef]
- Li, X.; Li, H.; Liu, Y.; Zhou, Q.; Xia, X. Numerical simulation of rock fragmentation mechanisms subject to wedge penetration for TBMs. Tunn. Undergr. Space Technol. 2016, 53, 96–108. [Google Scholar] [CrossRef]
- Zhong, G.; Wang, L.-N.; Ling, X.; Dong, J. An overview on data representation learning: From traditional feature learning to recent deep learning. J. Financ. Data Sci. 2016, 2, 265–278. [Google Scholar] [CrossRef]
- Sun, W.; Shi, M.; Zhang, C.; Zhao, J.; Song, X. Dynamic load prediction of tunnel boring machine (TBM) based on heterogeneous in-situ data. Autom. Constr. 2018, 92, 23–34. [Google Scholar] [CrossRef]
- Mahdevari, S.; Shahriar, K.; Yagiz, S.; Shirazi, M.A. A support vector regression model for predicting tunnel boring machine penetration rates. Int. J. Rock Mech. Min. Sci. 2014, 72, 214–229. [Google Scholar] [CrossRef]
- Zhou, J.; Qiu, Y.; Zhu, S.; Armaghani, D.J.; Li, C.; Nguyen, H.; Yagiz, S. Optimization of support vector machine through the use of metaheuristic algorithms in forecasting TBM advance rate. Eng. Appl. Artif. Intell. 2021, 97, 104015. [Google Scholar] [CrossRef]
- Noori, A.M.; Mikaeil, R.; Mokhtarian, M.; Haghshenas, S.S.; Foroughi, M. Feasibility of intelligent models for prediction of utilization factor of TBM. Geotech. Geol. Eng. 2020, 38, 3125–3143. [Google Scholar] [CrossRef]
- Afradi, A.; Ebrahimabadi, A.; Hallajian, T. Prediction of TBM penetration rate using fuzzy logic, particle swarm optimization and harmony search algorithm. Geotech. Geol. Eng. 2022, 40, 1513–1536. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT press: Cambridge, MA, USA, 2016. [Google Scholar]
- Bengio, Y.; Goodfellow, I.; Courville, A. Deep Learning; MIT press: Cambridge, MA, USA, 2017. [Google Scholar]
- Tian, C.; Fei, L.; Zheng, W.; Xu, Y.; Zuo, W.; Lin, C.W. Deep learning on image denoising: An overview. Neural Netw. 2020, 131, 251–275. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, J.; Hoi, S.C.H. Deep learning for image super-resolution: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 3365–3387. [Google Scholar] [CrossRef]
- Salamon, J.; Bello, J.P. Deep convolutional neural networks and data augmentation for environmental sound classification. IEEE Signal Processing Lett. 2017, 24, 279–283. [Google Scholar] [CrossRef]
- Kim, J.; Min, K.; Jung, M.; Chi, S. Occupant behavior monitoring and emergency event detection in single-person households using deep learning-based sound recognition. Build. Environ. 2020, 181, 107092. [Google Scholar] [CrossRef]
- Majumder, N.; Poria, S.; Gelbukh, A.; Erik, C. Deep learning-based document modeling for personality detection from text. IEEE Intell. Syst. 2017, 32, 74–79. [Google Scholar] [CrossRef]
- Chatterjee, A.; Gupta, U.; Chinnakotla, M.K.; Srikanth, R.; Galley, M.; Agrawal, P. Understanding emotions in text using deep learning and big data. Comput. Hum. Behav. 2017, 93, 309–317. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533–536. [Google Scholar] [CrossRef]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef]
- Ren, Q.B.; Li, M.C.; Li, H.; Shen, Y. A novel deep learning prediction model for concrete dam displacements using interpretable mixed attention mechanism. Adv. Eng. Inform. 2021, 50, 101407. [Google Scholar] [CrossRef]
- Li, M.C.; Li, M.H.; Ren, Q.B.; Li, H.; Song, L.G. DRLSTM: A dual-stage deep learning approach driven by raw monitoring data for dam displacement prediction. Adv. Eng. Inform. 2022, 51, 101510. [Google Scholar] [CrossRef]
- Bai, S.; Li, M.C.; Lu, Q.R.; Tian, H.J.; Qin, L. Global Time Optimization Method for Dredging Construction Cycles of Trailing Suction Hopper Dredger Based on Grey System Model. J. Constr. Eng. Manag. 2022, 148, 04021198. [Google Scholar] [CrossRef]
- Zhang, P.; Yin, Z.Y.; Zheng, Y.Y.; Gao, F.P. A LSTM surrogate modelling approach for caisson foundations. Ocean. Eng. 2020, 204, 107263. [Google Scholar] [CrossRef]
- Gao, X.; Shi, M.; Song, X.; Zhang, C.; Zhang, H. Recurrent neural networks for real-time prediction of TBM operating parameters. Autom. Constr. 2019, 98, 225–235. [Google Scholar] [CrossRef]
- Feng, S.; Chen, Z.; Luo, H.; Wang, S.; Zhao, Y.; Liu, L.; Ling, D.; Jing, L. Tunnel boring machines (TBM) performance prediction: A case study using big data and deep learning. Tunn. Undergr. Space Technol. 2021, 110, 103636. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Y.; Li, J.; Li, X.; Jing, L. Diagnosing tunnel collapse sections based on TBM tunneling big data and deep learning: A case study on the Yinsong Project, China. Tunn. Undergr. Space Technol. 2021, 108, 103700. [Google Scholar] [CrossRef]
- Graves, A. Long Short-Term Memory. Supervised Sequence Labelling with Recurrent Neural Networks; Springer: Berlin/Heidelberg, Germany, 2012; pp. 37–45. [Google Scholar] [CrossRef]
- Liu, Z.; Li, L.; Fang, X.; Qi, W.; Shen, J.; Zhou, H.; Zhang, Y. Hard-rock tunnel lithology prediction with TBM construction big data using a global-attention-mechanism-based LSTM network. Autom. Constr. 2021, 125, 103647. [Google Scholar] [CrossRef]
- Gao, B.; Wang, R.; Lin, C.; Guo, X.; Liu, B.; Zhang, W. TBM penetration rate prediction based on the long short-term memory neural network. Undergr. Space 2021, 6, 718–731. [Google Scholar] [CrossRef]
- Fu, X.; Zhang, L. Spatio-temporal feature fusion for real-time prediction of TBM operating parameters: A deep learning approach. Autom. Constr. 2021, 132, 103937. [Google Scholar] [CrossRef]
- Li, L.; Liu, Z.; Zhou, H.; Zhang, J.; Shen, W.; Shao, J. Prediction of TBM cutterhead speed and penetration rate for high-efficiency excavation of hard rock tunnel using CNN-LSTM model with construction big data. Arab. J. Geosci. 2022, 15, 1–17. [Google Scholar] [CrossRef]
- Wang, Q.; Xie, X.; Shahrour, I. Deep learning model for shield tunneling advance rate prediction in mixed ground condition considering past operations. IEEE Access 2020, 8, 215310–215326. [Google Scholar] [CrossRef]
- Mokhtari, S.; Mooney, M.A. Predicting EPBM advance rate performance using support vector regression modeling. Tunn. Undergr. Space Technol. 2020, 104, 103520. [Google Scholar] [CrossRef]
- Fu, X.; Gong, Q.; Wu, Y.; Zhao, Y.; Li, H. Prediction of EPB Shield Tunneling Advance Rate in Mixed Ground Condition Using Optimized BPNN Model. Appl. Sci. 2022, 12, 5485. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | Chainage | Data Number |
|---|---|---|
| Day 1 | 98 + 901–98 + 905 | 3985 |
| Day 2 | 98 + 905–98 + 908 | 4466 |
| Day 3 | 98 + 908–98 + 918 | 11,095 |
| Day 9 | 98 + 918–98 + 918 | 553 |
| Day 10 | 98 + 918–98 + 918 | 353 |
| Day 11 | 98 + 918–98 + 918 | 305 |
| Day 12 | 98 + 918–98 + 919 | 345 |
| Day 17 | 98 + 919–98 + 923 | 6014 |
| Day 18 | 98 + 923–98 + 932 | 12,135 |
| Day 19 | 98 + 923–98 + 940 | 11,487 |
| Day 20 | 98 + 940–98 + 952 | 13,845 |
| Day 21 | 98 + 952–98 + 964 | 14,169 |
| Day 22 | 98 + 964–98 + 979 | 17,936 |
| Day 23 | 98 + 979–98 + 995 | 19,106 |
| Day 24 | 98 + 995–99 + 002 | 8744 |
| Day 25 | 99 + 002–99 + 012 | 11,650 |
| Day 26 | 99 + 012–99 + 022 | 12,286 |
| Day 27 | 99 + 022–99 + 033 | 13,753 |
| Day 28 | 99 + 033–99 + 045 | 14,732 |
| Total | - | 176,959 |
| Advance Rate (V) | N | F | T | P | Soil_P |
|---|---|---|---|---|---|
| 0.146484 | 2.037544 | 2,829.455 | 1,279.006 | 0.071893 | 0.646701 |
| 2.270325 | 2.030816 | 2,895.904 | 1,147.540 | 1.117937 | 0.641276 |
| 2.270325 | 2.034939 | 2,943.162 | 1,080.693 | 1.115672 | 0.666884 |
| 2.197357 | 2.033203 | 25,555.990 | 3,005.447 | 1,040.585 | 1.080737 |
| 2.197357 | 2.036675 | 3,047.997 | 1,029.444 | 1.078894 | 0.710067 |
| 1.684570 | 2.032335 | 3,088.011 | 1,009.390 | 0.828884 | 0.735460 |
| … | … | … | … | … | … |
| Operation Parameters | Max | Min | Medium | Unit |
|---|---|---|---|---|
| Advance rate (V) | 112.353 | 0.073 | 46.451 | mm/min |
| Rotation speed of cutter head (N) | 2.245 | 0.510 | 1.800 | rpm |
| Penetration rate (P) | 120.977 | 0.037 | 25.889 | mm/r |
| Thrust (F) Torque (T) | 25,555.99 | 1,041.287 | 16,995.810 | kN |
| 8,834.944 | 311.953 | 5,275.055 | kN·m | |
| Chamber earth pressure (Soil_P) | 2.155 | 0.030 | 0.772 | bar |
| Model Schemes | Date | Section | Training Data Number | Training Time (s) |
|---|---|---|---|---|
| 1 | Day 1–Day 27 | 98 + 901–99 + 033 | 162,227 | 4360 |
| 2 | Day 20–Day 27 | 98 + 940–99 + 033 | 111,489 | 2994 |
| 3 | Day 24–Day 27 | 98 + 995–99 + 033 | 46,433 | 1248 |
| 4 | Day 26–Day 27 | 99 + 012–99 + 033 | 26,039 | 642 |
| 5 | Day 27 | 99 + 022–99 + 033 | 13,753 | 396 |
| Models | Data type | RMSE | MAE | R2 |
|---|---|---|---|---|
| Scheme 1 | Training | 7.120 | 2.326 | 0.569 |
| Test | 6.829 | 2.364 | 0.443 | |
| Scheme 2 | Training | 3.870 | 1.563 | 0.845 |
| Test | 3.811 | 1.588 | 0.826 | |
| Scheme 3 | Training | 1.606 | 1.196 | 0.926 |
| Test | 1.665 | 1.130 | 0.920 | |
| Scheme 4 | Training | 1.463 | 1.028 | 0.960 |
| Test | 1.657 | 1.044 | 0.955 | |
| Scheme 5 | Training | 1.534 | 1.128 | 0.948 |
| Test | 1.764 | 1.103 | 0.945 |
| Data Type | RMSE | MAE | R2 |
|---|---|---|---|
| SVM | 3.381 | 3.111 | 0.901 |
| RF | 1.920 | 1.823 | 0.951 |
| LR | 4.196 | 3.949 | 0.845 |
| MLP | 2.252 | 1.799 | 0.939 |
| KNN | 6.513 | 5.154 | 0.492 |
| CNN-Bi-LSTM-Attention | 1.657 | 1.044 | 0.955 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Chen, J.; Han, S.; Li, B. Big Data-Based Performance Analysis of Tunnel Boring Machine Tunneling Using Deep Learning. Buildings 2022, 12, 1567. https://doi.org/10.3390/buildings12101567
Zhang Y, Chen J, Han S, Li B. Big Data-Based Performance Analysis of Tunnel Boring Machine Tunneling Using Deep Learning. Buildings. 2022; 12(10):1567. https://doi.org/10.3390/buildings12101567
Chicago/Turabian StyleZhang, Ye, Jinqiao Chen, Shuai Han, and Bin Li. 2022. "Big Data-Based Performance Analysis of Tunnel Boring Machine Tunneling Using Deep Learning" Buildings 12, no. 10: 1567. https://doi.org/10.3390/buildings12101567