
The Reduced-Degree-of-Freedom Model for Seismic Analysis of Predominantly Plan-Symmetric Reinforced Concrete Wall–Frame Building


Abstract
:1. Introduction
2. Description of the RDOF Models
2.1. The IFB Model for Frame Buildings
2.1.1. The First Level Assumptions Common to the Conventional MDOF Model
2.1.2. The Second Level Assumptions Introduced for the IFB Model’s Definition
2.2. The RDOF Model for the Analysis of Simple Wall–Fame Buildings
3. Example Buildings and Mathematical Modelling
3.1. The Frame Buildings
3.2. The Simple Wall–Frame Buildings
3.3. Description of the RDOF and MDOF Models
4. Capability of the RDOF Model for Imposed Displacement, Dynamic, and Fragility Analysis
4.1. Imposed Displacement Analysis
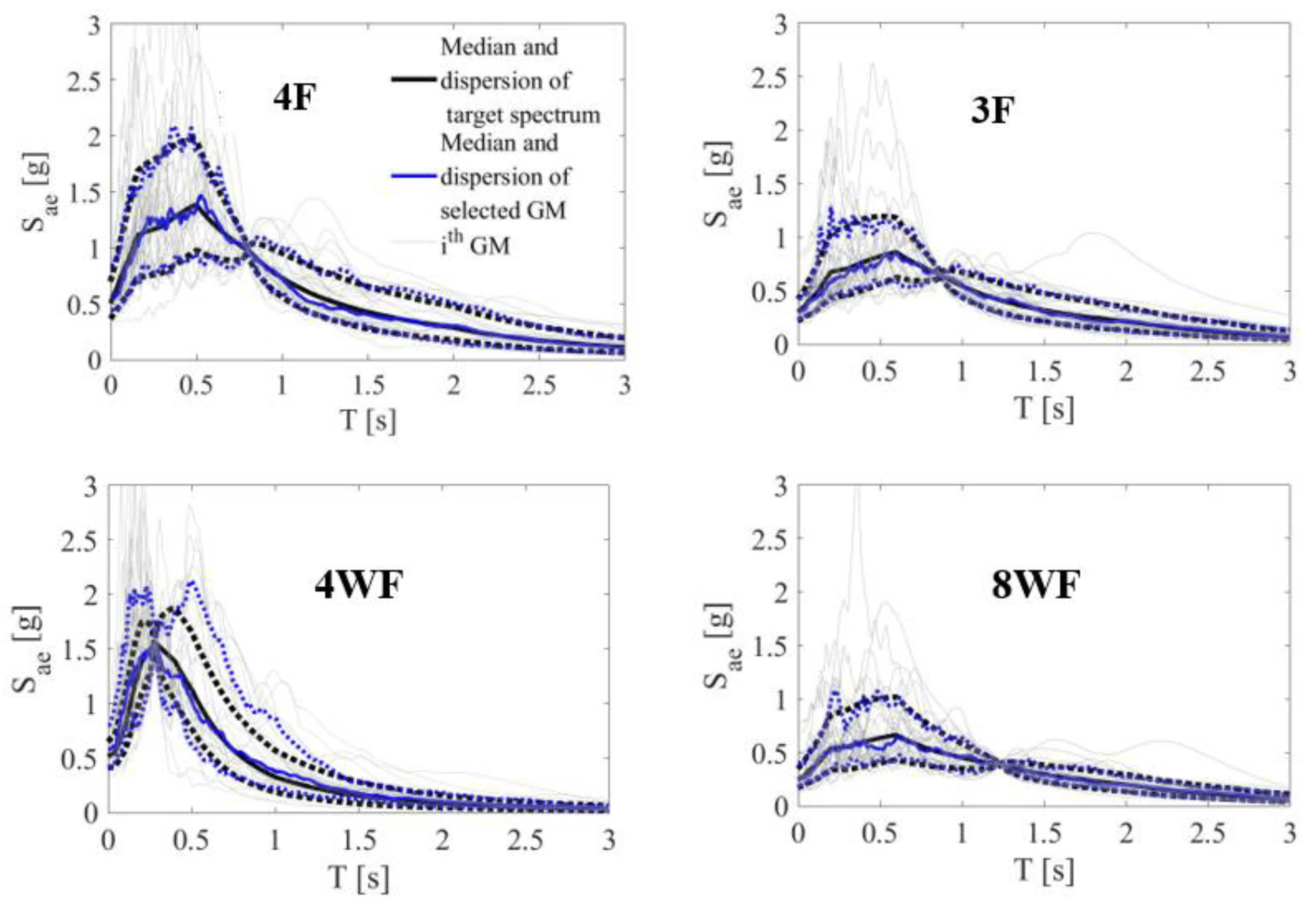
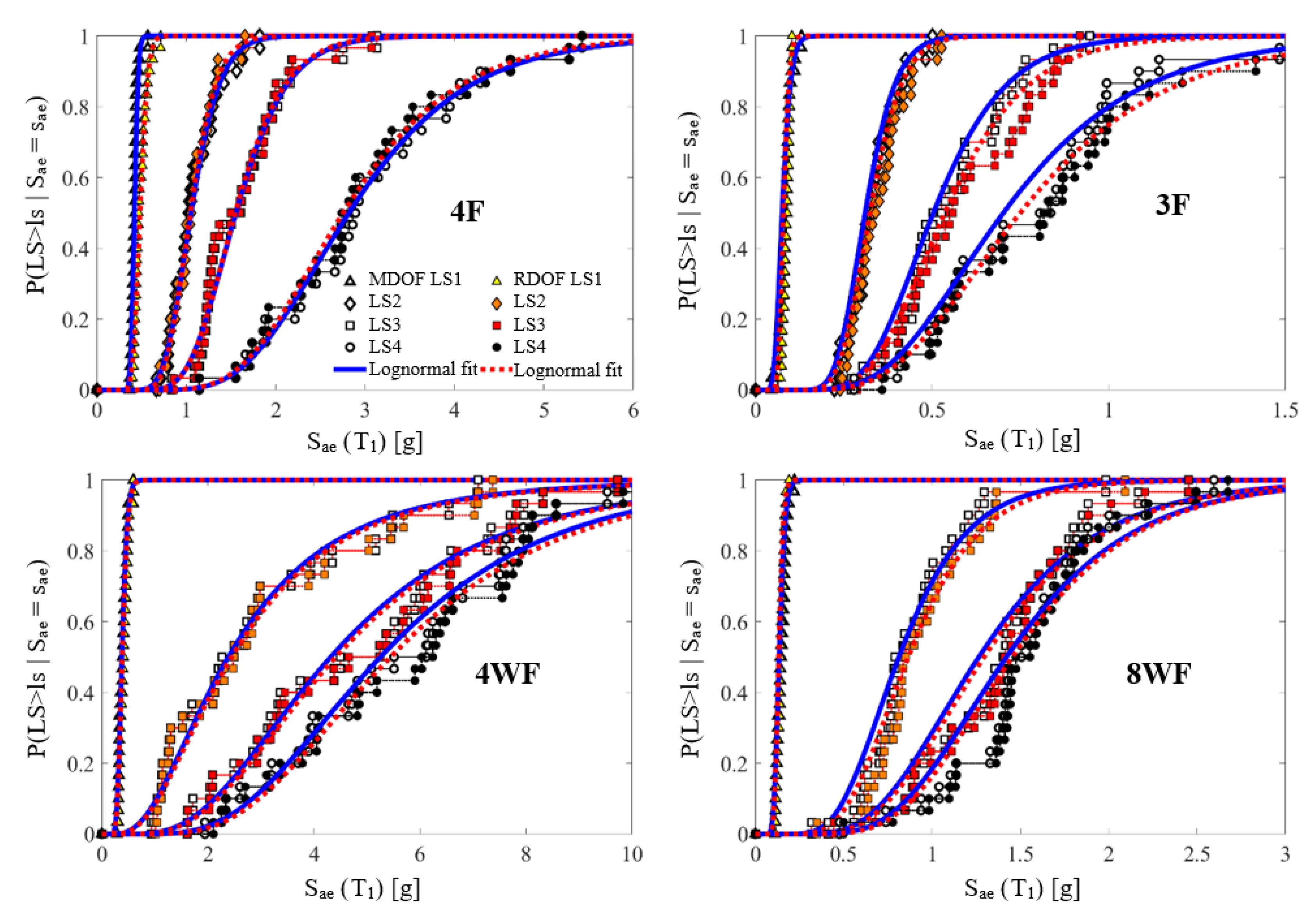
4.2. Incremental Dynamic Analysis (IDA) and Fragility Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ibarra, L.F.; Krawinkler, H. Global Collapse of Frame Structures under Seismic Excitations. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2005. [Google Scholar]
- Haselton, C.B.; Goulet, C.A.; Mitrani-Reiser, J.; Beck, J.L.; Deierlein, G.G.; Porter, K.A.; Stewart, J.P.; Taciroglu, E. An Assessment to Benchmark the Seismic Performance of a Code-Conforming Reinforced Concrete Moment-Frame Building; University of California at Berkeley: Berkeley, CA, USA, 2008. [Google Scholar]
- Fajfar, P.; Dolšek, M.; Marušić, D.; Stratan, A. Pre- and post-test mathematical modelling of a plan-asymmetric reinforced concrete frame building. Earthq. Eng. Struct. Dyn. 2006, 35, 1359–1379. [Google Scholar] [CrossRef]
- ATC. FEMA-P-58-1—Seismic Performance Assessment of Buildings, Volume 1—Methodology; FEMA: Washington, UK, 2018. [Google Scholar]
- Fajfar, P. A non-linear analysis method for performance based seismic design. Earthq. Spec. 2000, 16, 573–592. [Google Scholar] [CrossRef]
- Snoj, J.; Dolšek, M. Pushover-based seismic risk assessment and loss estimation of masonry buildings. Earthq. Eng. Struct. Dyn. 2020, 49, 567–588. [Google Scholar] [CrossRef]
- Crowley, H.; Pinho, R.; van Elk, J.; Uilenreef, J. Probabilistic damage assessment of buildings due to induced seismicity. Bull. Earthq. Eng. 2019, 17, 4495–4516. [Google Scholar] [CrossRef]
- Ogawa, K.; Kamura, H.; Inoue, K. Modeling of the moment resistant frame to fishbone-shaped frame for the response analy-sis. J. Str. Constr. Eng. 1999, 521, 119–126. [Google Scholar] [CrossRef]
- Nakashima, M.; Ogawa, K.; Inoue, K. Generic frame model for simulation of earthquake responses of steel moment frames. Earthq. Eng. Struct. Dyn. 2002, 31, 671–692. [Google Scholar] [CrossRef]
- Khaloo, A.R.; Khosravi, H. Modified fish-bone model: A simplified MDOF model for simulation of seismic responses of mo-ment resisting frames. Soil Dyn. Earth. Eng. 2013, 55, 195–210. [Google Scholar] [CrossRef]
- Khaloo, A.R.; Khosravi, H.; Jamnani, H.H. Nonlinear Interstory Drift Contours for Idealised Forward Directivity Pulses us-ing “Modified Fish-Bone” Models. Adv. Str. Eng. 2015, 18, 603–627. [Google Scholar] [CrossRef]
- Soleimani, R.; Khosravi, H.; Hamidi, H. Substitute Frame and adapted Fish-Bone model: Two simplified frames representa-tive of RC moment resisting frames. Eng. Struct. 2019, 185, 68–89. [Google Scholar] [CrossRef]
- Jamšek, A.; Dolšek, M. Seismic analysis of older and contemporary reinforced concrete frames with the improved fish-bone model. Eng. Struct. 2020, 212, 110514. [Google Scholar] [CrossRef]
- Luco, N.; Mori, Y.; Funahashi, Y.; Cornell, C.A.; Nakashima, M. Evaluation of predictors of non-linear seismic demands using ?fishbone? models of SMRF buildings. Earthq. Eng. Struct. Dyn. 2003, 32, 2267–2288. [Google Scholar] [CrossRef]
- Haghighat, A.; Sharifi, A. Evaluation of Modified Fish-Bone Model for Estimating Seismic Demands of Irregular MRF Struc-tures. Period. Polytech. Civ. Eng. 2018. Available online: https://www.semanticscholar.org/paper/Evaluation-of-Modified-Fish-Bone-Model-for-Seismic-Haghighat-Sharifi/16e6980ed9e8163a2ac800238b2393606101840b (accessed on 10th December 2019). [CrossRef] [Green Version]
- Li, X.; Kurata, M. Probabilistic updating of fish-bone model for assessing seismic damage to beam–column connections in steel moment-resisting frames. Comput. Aided Civ. Infrastruct. Eng. 2019, 34, 790–805. [Google Scholar] [CrossRef]
- Zhe, Q.; Ting, G.; Qiqi, L.; Tao, W. Evaluation of the fishbone model in simulating the seismic response of multistory rein-forced concrete moment-resisting frames. Earthq. Eng. Eng. Vibr. 2019, 18, 315–330. [Google Scholar]
- Araki, Y.; Ohno, M.; Mukai, I.; Hashimoto, N. Consistent DOF reduction of tall steel frames. Earthq. Eng. Struct. Dyn. 2017, 46, 1581–1597. [Google Scholar] [CrossRef]
- FEMA 440. Improvement of Nonlinear Static Seismic Analysis Procedures; FEMA: Washington, UK, 2005. [Google Scholar]
- Miranda, E.; Akkar, S.D. Generalised Interstory Drift Spectrum. J. Struct. Eng. 2006, 132, 840–852. [Google Scholar] [CrossRef] [Green Version]
- Ramirez, C.M.; Miranda, E. Building-Specific Loss Estimation Methods & Tools for Simplified Performance-Based Earthquake Engineering. Ph.D. Thesis, Stanford University, Stanford, CA, USA, 2009. [Google Scholar]
- Kilar, V.; Fajfar, P. Simplified Pushover Analysis of Building Structures. In Proceedings of the Eleventh World Conference on Earthquake Engineering, Acapulco, Mexico, 23–28 June 1996. [Google Scholar]
- Kilar, V.; Fajfar, P. Simple Push-Over Analysis of Asymmetric Buildings. Earthq. Eng. Struct. Dyn. 1997, 26, 233–249. [Google Scholar] [CrossRef]
- Dolšek, M. Development of computing environment for the seismic performance assessment of reinforced concrete frames by using simplified non-linear models. Bull. Earthq Eng. 2010, 8, 1309–1329. [Google Scholar] [CrossRef]
- Fischinger, M.; Isaković, T.; Kolozvari, K.; Wallace, J. Guest editorial: Non-linear modelling of reinforced concrete structural walls. Bull. Earth. Eng. 2019, 17, 6359–6368. [Google Scholar] [CrossRef]
- Celarec, D.; Dolšek, M. Practice-oriented probabilistic seismic performance assessment of infilled frames with consideration of shear failure of columns. Earthq. Eng. Struct. Dyn. 2012, 42, 1339–1360. [Google Scholar] [CrossRef]
- CEN. Eurocode 2: Design of Concrete Structures—Part 1-1: General Rules and Rules for Buildings; European Committee for Standardization: Brussels, Belgium, 2004. [Google Scholar]
- CEN. Eurocode 8: Design of Structures for Earthquake Resistance—Part 1: General Rules, Seismic Actions and Rules for Buildings; European Committee for Standardization: Brussels, Belgium, 2004. [Google Scholar]
- Jamšek, A. Seismic stress test with incomplete building data (“Seizmični stresni test z nepopolnimi podatki o stavbi”), in Slo-vene. PhD Thesis, University of Ljubljana, Ljubljana, Slovenia, 2020. [Google Scholar]
- Kosič, M. Determination of Dispersion Measures for Seismic Response of Concrete Buildings (“Določanje Raztrosa Potresnega odziva Armiranobetonskih Stavb”). Ph D. Thesis, University of Ljubljana, Ljubljana, Slovenia, 2014. [Google Scholar]
- CEN. Eurocode 8: Design of Structures for Earthquake Resistance—Part 3: Assessment and Retrofitting of Buildings; European Committee for Standardization: Brussels, Belgium, 2005. [Google Scholar]
- Negro, P.; Colombo, A. Irregularities induced by non-structural masonry panels in framed buildings. Eng. Struct. 1997, 19, 576–585. [Google Scholar] [CrossRef]
- Fardis, M.N. (Ed.) Experimental and Numerical Investigations on the Seismic Response of RC Infilled Frames and Recommen-Dations for Code Provisions; LNEC: Lisbon, Portugal, 1996. [Google Scholar]
- Fardis, M.N.; Negro, P. (Eds.) Seismic performance assessment and rehabilitation of existing buildings. In Proceedings of the International Workshop, EC JRC, Ispra, Italy, 4–5 April 2005. [Google Scholar]
- CEN. Eurocode 8: Design of Structures for Earthquake Resistance—Part 2: Bridges; European Committee for Standardization: Brussels, Belgium, 2005. [Google Scholar]
- MATLAB. The MathWorks, Inc. 2005. Available online: http://www.mathworks.com (accessed on 1 February 2012).
- PEER. Open System for Earthquake Engineering Simulation (OpenSees); Pacific Earthquake Engineering Research Center: Berkeley, CA, USA, 2007. [Google Scholar]
- FEMA 461. Interim Testing Protocols for Determining the Seismic Performance Characteristics of Structural and Nonstruc-tural Components; Federal Emergency Management Agency: Washington, UK, 2007. [Google Scholar]
- Vamvatsikos, D.; Cornell, C.A. Incremental dynamic analysis. Earthq. Eng. Struct. Dyn. 2002, 31, 491–514. [Google Scholar] [CrossRef]
- Jayaram, N.; Lin, A.T.; Baker, J. A Computationally Efficient Ground-Motion Selection Algorithm for Matching a Target Response Spectrum Mean and Variance. Earthq. Spectra 2011, 27, 797–815. [Google Scholar] [CrossRef]
- Baker, J.W. Conditional Mean Spectrum: Tool for Ground-Motion Selection. J. Struct. Eng. 2011, 137, 322–331. [Google Scholar] [CrossRef]
- Lapajne, J.; Motnikar, B.Š.; Zupančič, P. Probabilistic Seismic Hazard Assessment Methodology for Distributed Seismicity. Bull. Seism. Soc. Am. 2003, 93, 2502–2515. [Google Scholar] [CrossRef]
- Chiou, B.S.J.; Darragh, R.; Gregor, N.; Silva, W.J. NGA Project Strong-Motion Database. Earthq. Spectra 2008, 24, 23–44. [Google Scholar] [CrossRef] [Green Version]
- Akkar, S.; Sandikkaya, M.A.; Şenyurt, M.; Sisi, A.A.; Ay, B.Ő.; Traversa, P.; Douglas, J.; Cotton, F.; Luzi, L.; Hernandez, B.; et al. Reference database for seismic ground-motion in Europe (RESORCE). Bull. Earthq. Eng. 2014, 12, 311–339. [Google Scholar] [CrossRef] [Green Version]
- Aslani, H.; Miranda, E. Probabilistic Earthquake Loss Estimation and Loss Disaggregation in Buildings. Ph D. Thesis, Stanford University, Stanford, CA, USA, 2005. [Google Scholar]
- Bradley, B.A. Structure-Specific Probabilistic Seismic Risk Assessment. Ph D. Thesis, Engineering University of Canterbury Christchurch, New Zealand, 2009. Ph D. Thesis, Engineering University of Canterbury, Christchurch, New Zealand, 2009. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Building | Design Principle | Regularity | Reference Design Peak Ground Acceleration, agR [g] | Fundamental Period of MDOF Model, T1 [s] |
|---|---|---|---|---|
| 4F | preEC8, DCH | Plan, elevation | 0.30 | 0.80 |
| 3F | Old design practice | Elevation | / | 0.87 |
| 4WF | EC8, DCM | Plan, elevation | 0.25 | 0.30 |
| 8WF | EC8, DCM | Plan, elevation | 0.25 | 1.23 |
| − | |||||||
|---|---|---|---|---|---|---|---|
| Limit State | RDOF Model | MDOF Model | RDOF Model | MDOF Model | |||
| 4F | LS1 | 0.47 | 0.42 | +12% | 0.14 | 0.10 | +35% |
| LS2 | 1.05 | 1.05 | −1% | 0.22 | 0.24 | −8% | |
| LS3 | 1.55 | 1.56 | −1% | 0.28 | 0.29 | −2% | |
| LS4 | 2.75 | 2.83 | −2% | 0.36 | 0.35 | +7% | |
| 3F | LS1 | 0.08 | 0.08 | +5% | 0.15 | 0.23 | −35% |
| LS2 | 0.32 | 0.31 | +4% | 0.22 | 0.22 | +1% | |
| LS3 | 0.54 | 0.50 | +6% | 0.34 | 0.32 | +6% | |
| LS4 | 0.75 | 0.70 | +7% | 0.43 | 0.42 | +2% | |
| 4WF | LS1 | 0.38 | 0.38 | +2% | 0.21 | 0.21 | +2% |
| LS2 | 2.45 | 2.38 | +3% | 0.65 | 0.65 | −1% | |
| LS3 | 4.41 | 4.32 | +2% | 0.55 | 0.55 | −1% | |
| LS4 | 5.45 | 5.26 | +4% | 0.48 | 0.48 | −1% | |
| 8WF | LS1 | 0.13 | 0.13 | +0% | 0.16 | 0.19 | −18% |
| LS2 | 0.86 | 0.81 | +6% | 0.37 | 0.37 | −1% | |
| LS3 | 1.15 | 1.07 | +6% | 0.42 | 0.42 | −2% | |
| LS4 | 1.26 | 1.24 | +2% | 0.43 | 0.44 | −2% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jamšek, A.; Dolšek, M. The Reduced-Degree-of-Freedom Model for Seismic Analysis of Predominantly Plan-Symmetric Reinforced Concrete Wall–Frame Building. Buildings 2021, 11, 372. https://doi.org/10.3390/buildings11080372
Jamšek A, Dolšek M. The Reduced-Degree-of-Freedom Model for Seismic Analysis of Predominantly Plan-Symmetric Reinforced Concrete Wall–Frame Building. Buildings. 2021; 11(8):372. https://doi.org/10.3390/buildings11080372
Chicago/Turabian StyleJamšek, Aleš, and Matjaž Dolšek. 2021. "The Reduced-Degree-of-Freedom Model for Seismic Analysis of Predominantly Plan-Symmetric Reinforced Concrete Wall–Frame Building" Buildings 11, no. 8: 372. https://doi.org/10.3390/buildings11080372