
Buckling Analysis of Thin-Walled Circular Shells under Local Axial Compression using Vector Form Intrinsic Finite Element Method
Abstract
:1. Introduction
2. Analysis Model
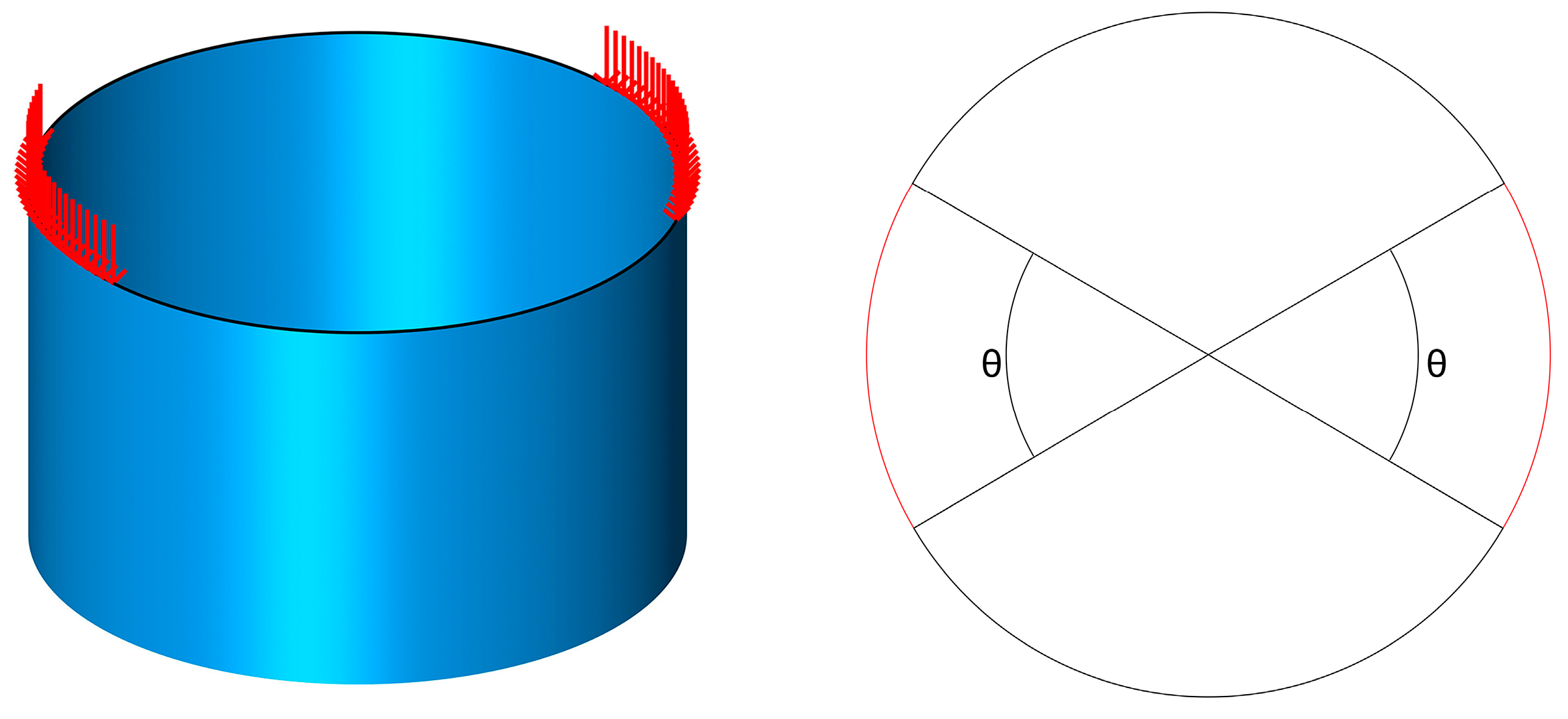
2.1. Circular Tube under Localized Axial Compression Loads
2.2. Governing Equations
2.3. Internal Force
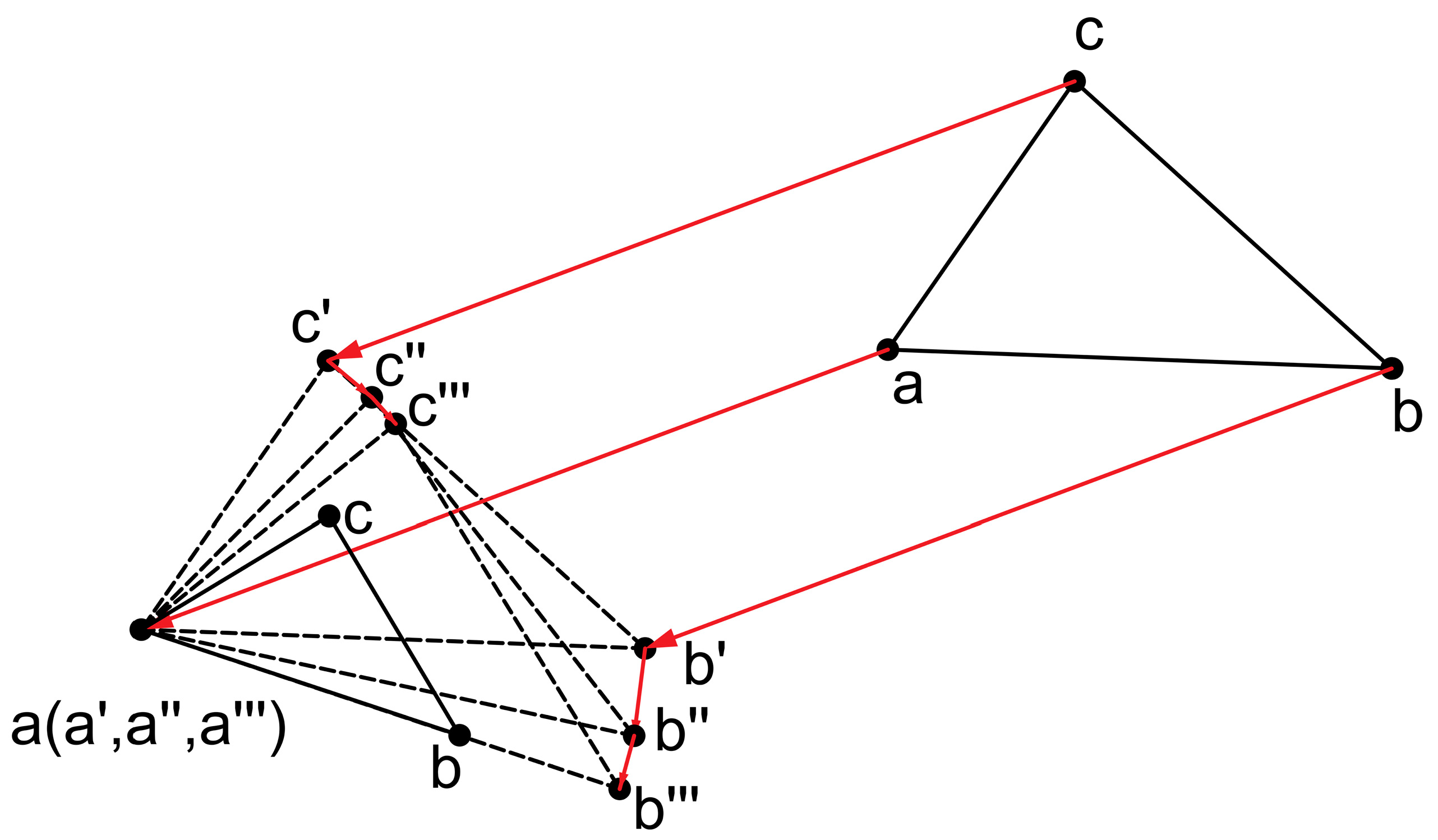
2.3.1. Inverse Motion
2.3.2. Solution of Internal Force
2.4. Determination of Buckling
2.5. Nonlinearity
2.5.1. Geometric Nonlinearity
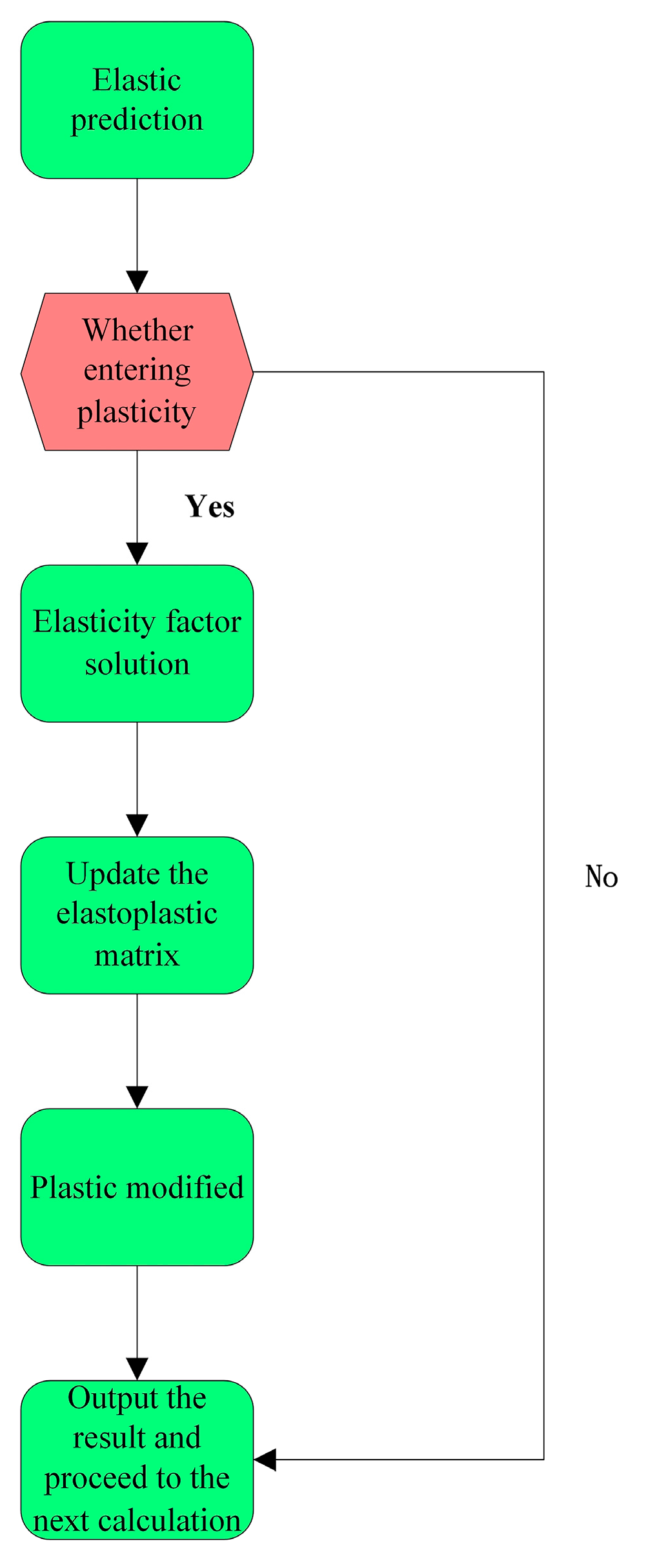
2.5.2. Material Nonlinearity
3. Model Verification and Parameter Setting
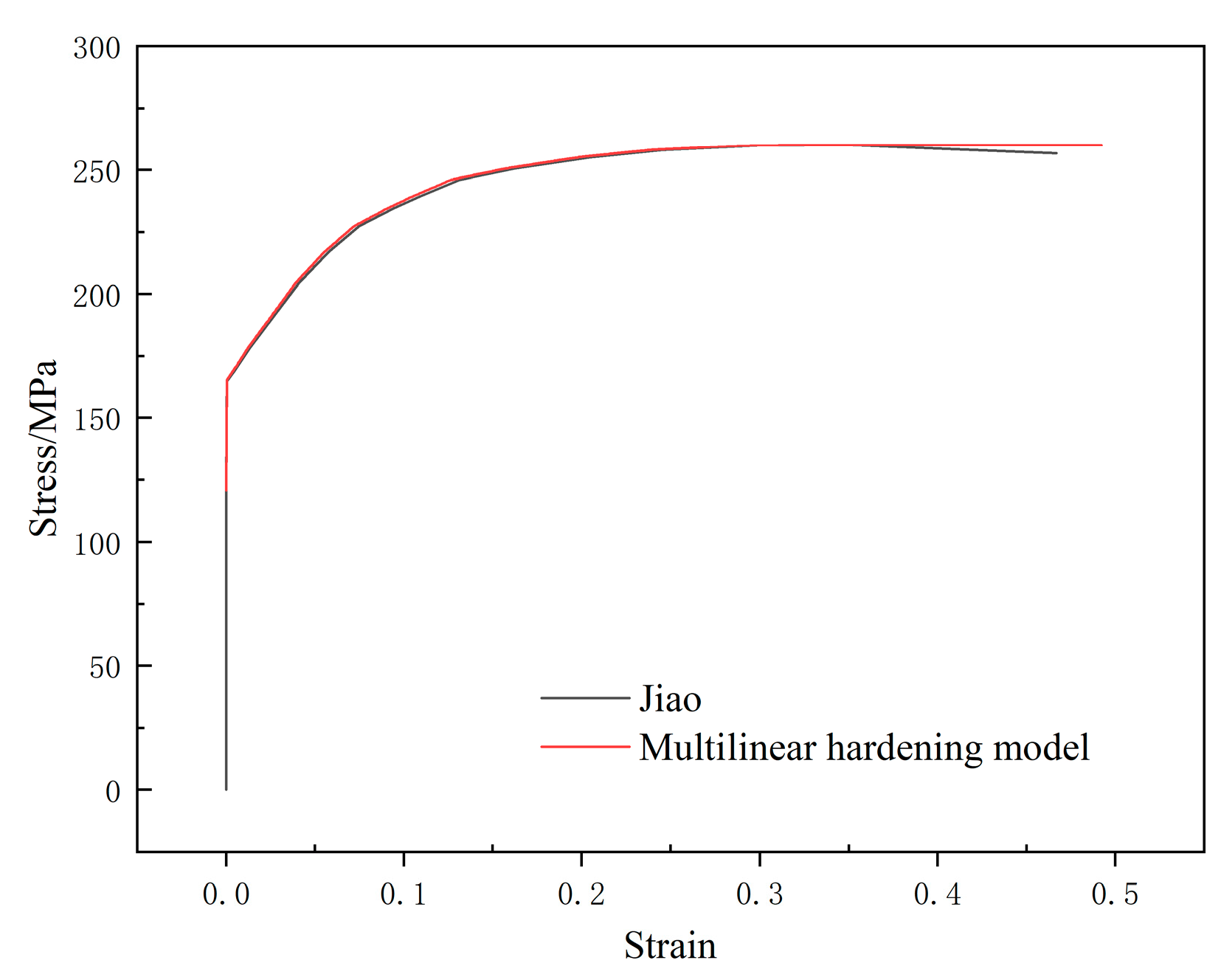
3.1. Multilinear Hardening Model Verification
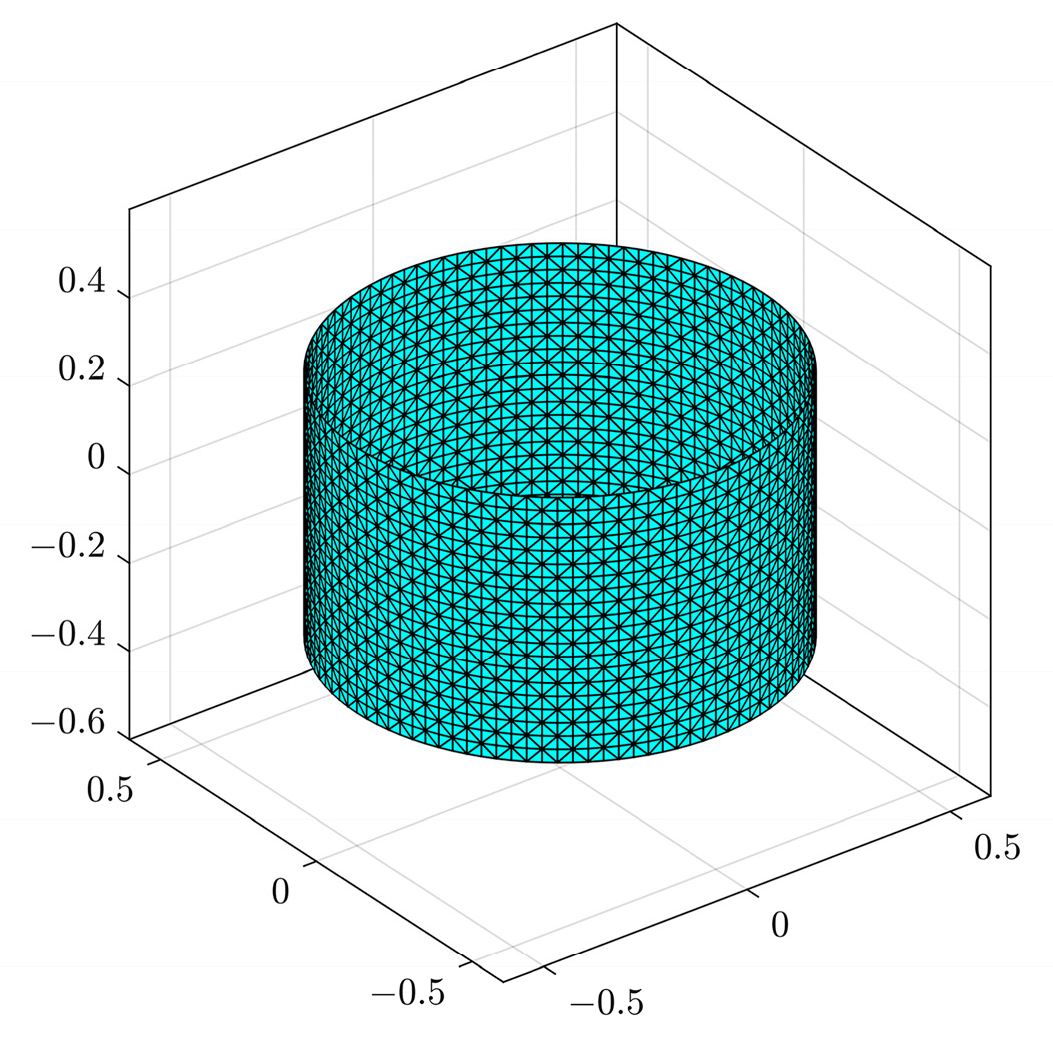
3.2. Calculation Parameters
4. Results and Discussion
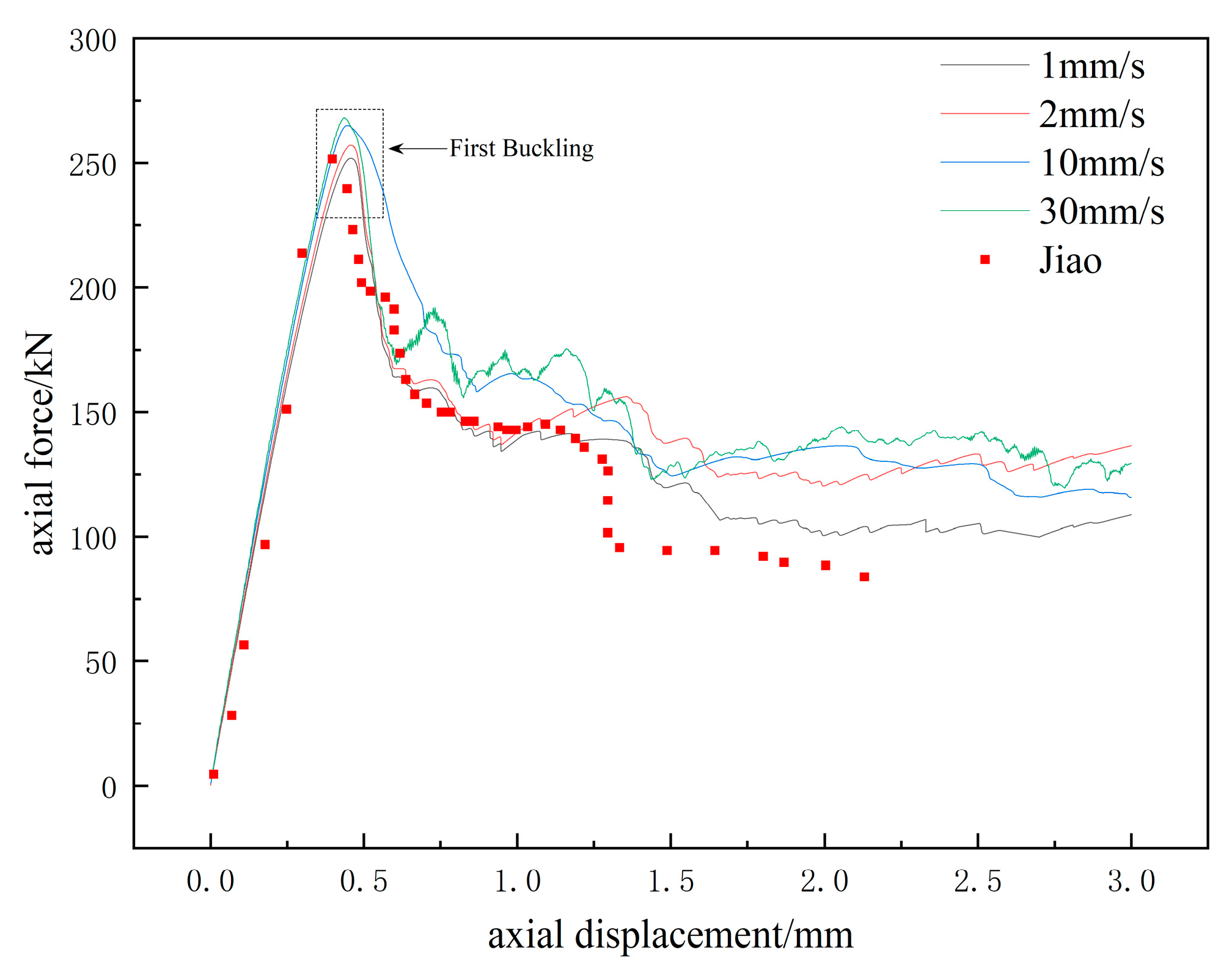
4.1. First Buckling Load Buckling Modes
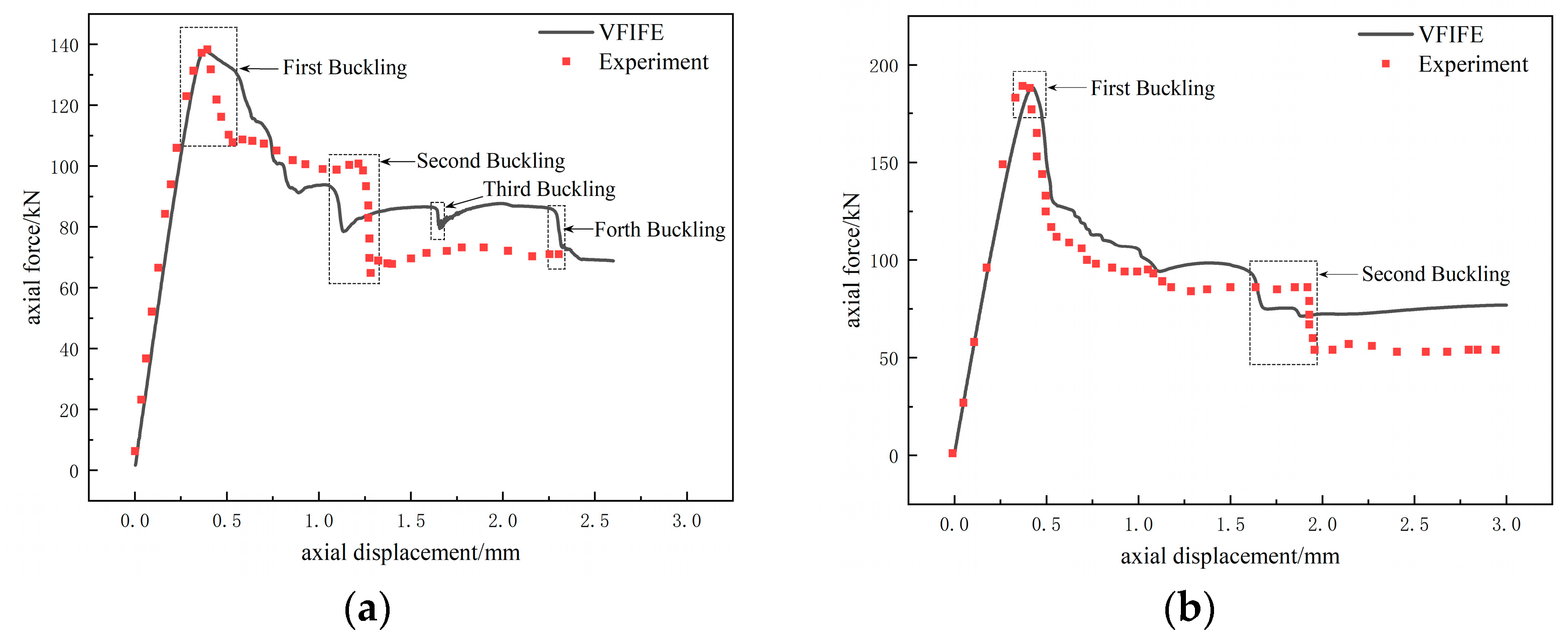
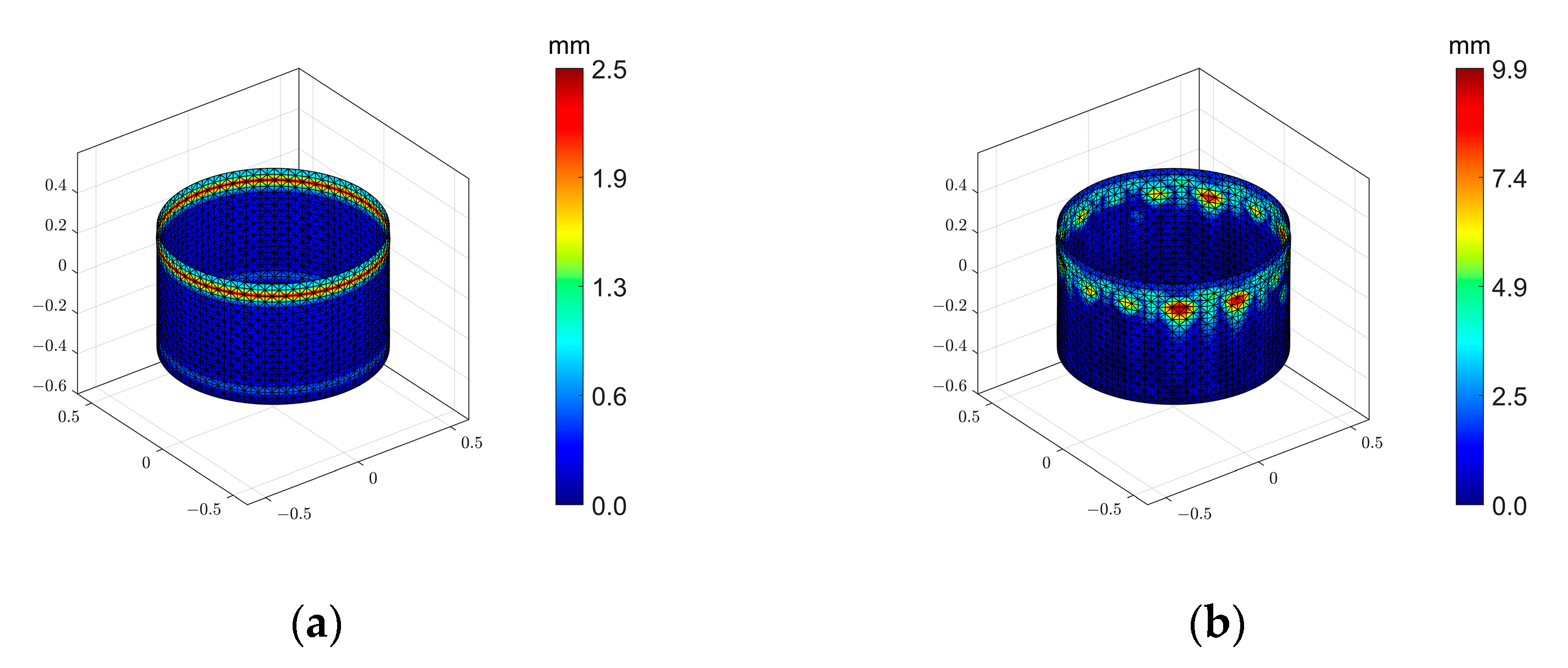
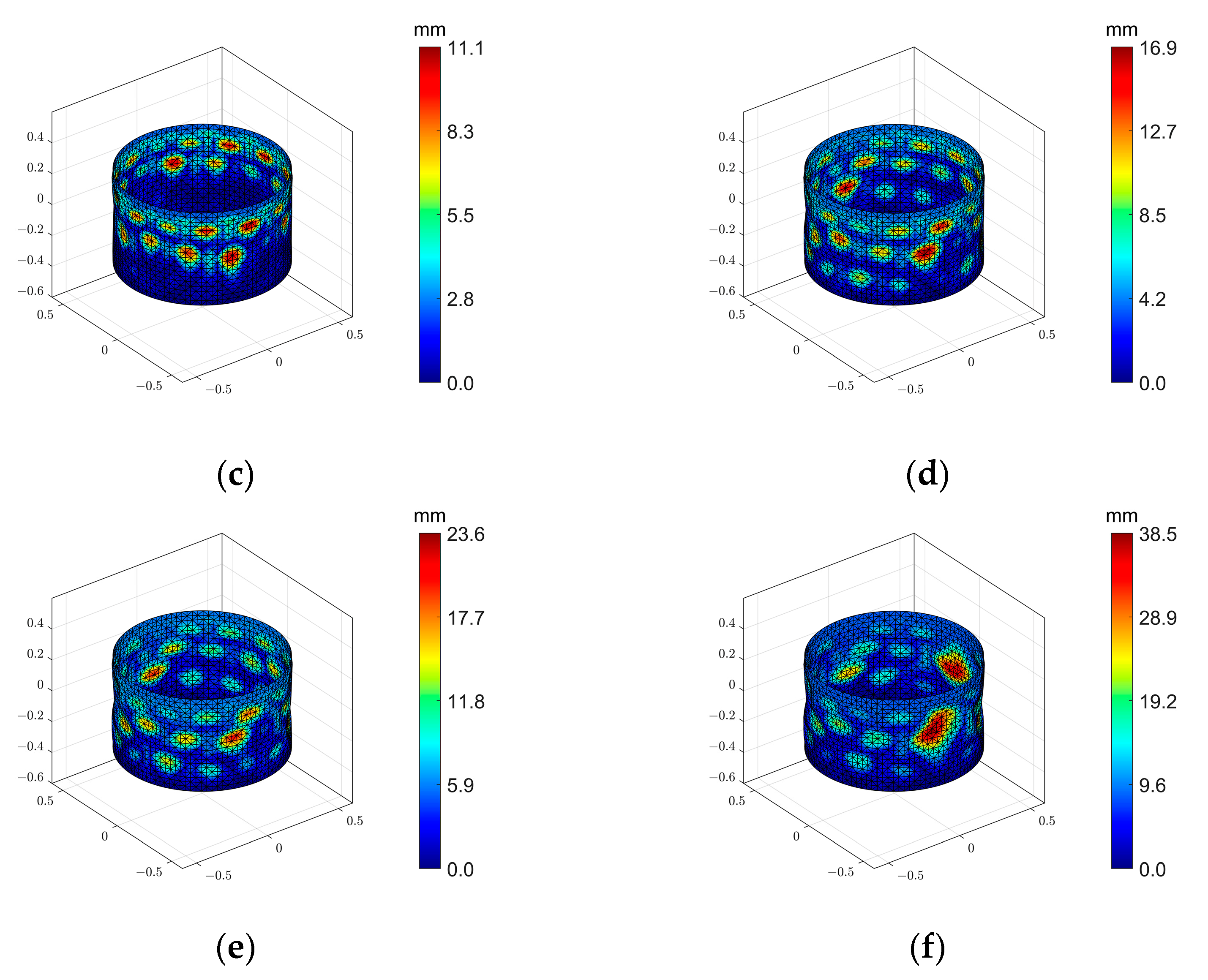
4.2. Buckling Modes and Postbuckling
5. Conclusions
- (1)
- The multilinear hardening model based on the von Mises yield criterion can divide the elastic-plastic constitutive curve of materials into multiple broken lines and can approach the elastic-plastic constitutive curve of some materials infinitely closely. The stress–strain relationship of materials can be simulated accurately when the model is applied to VFIFE. Compared with the ideal elastoplasticity, bilinear hardening model, power hardening model, and Ramberg–Osgood model used in most numerical simulations, the structural strain under a given stress can be simulated more accurately.
- (2)
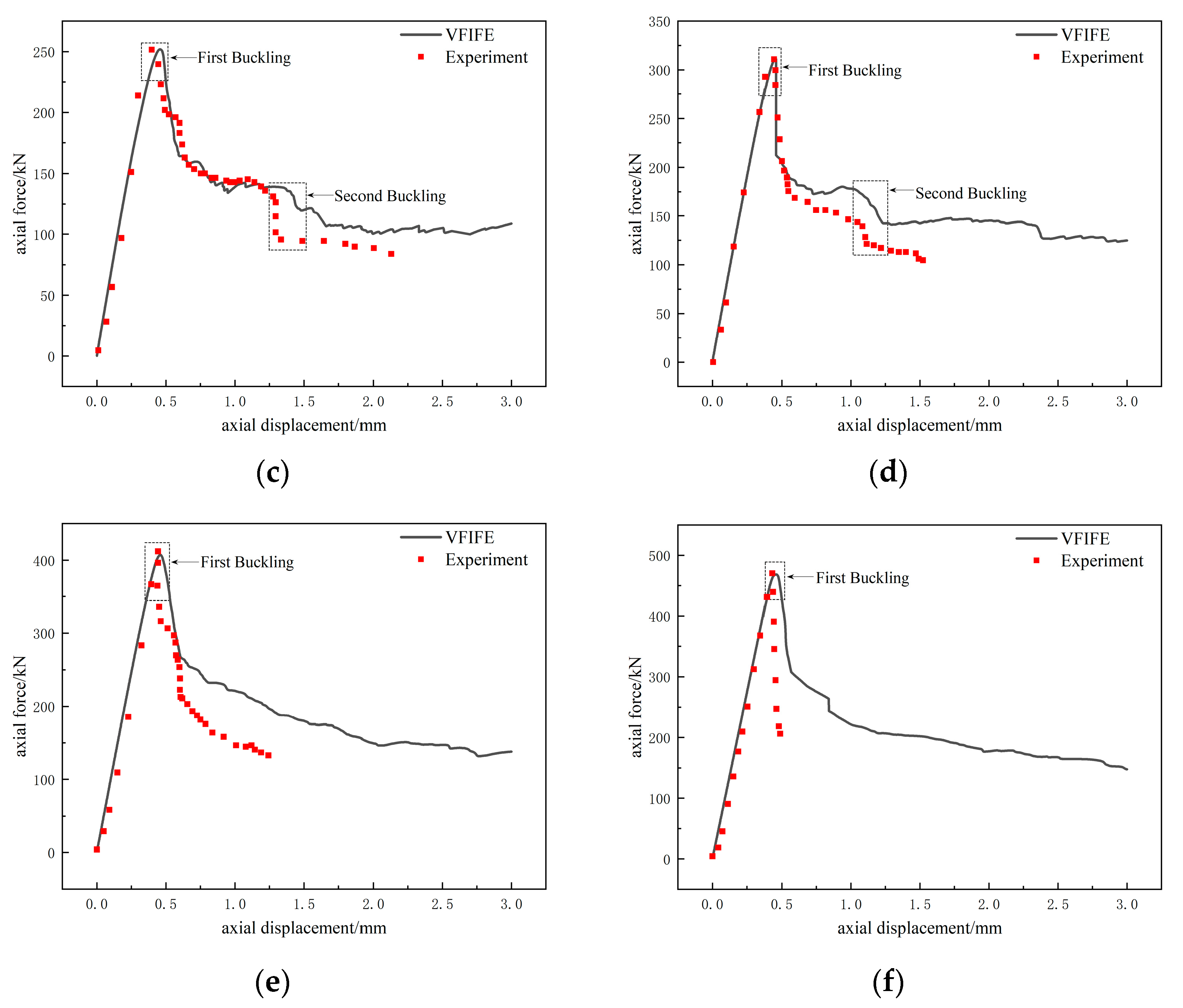
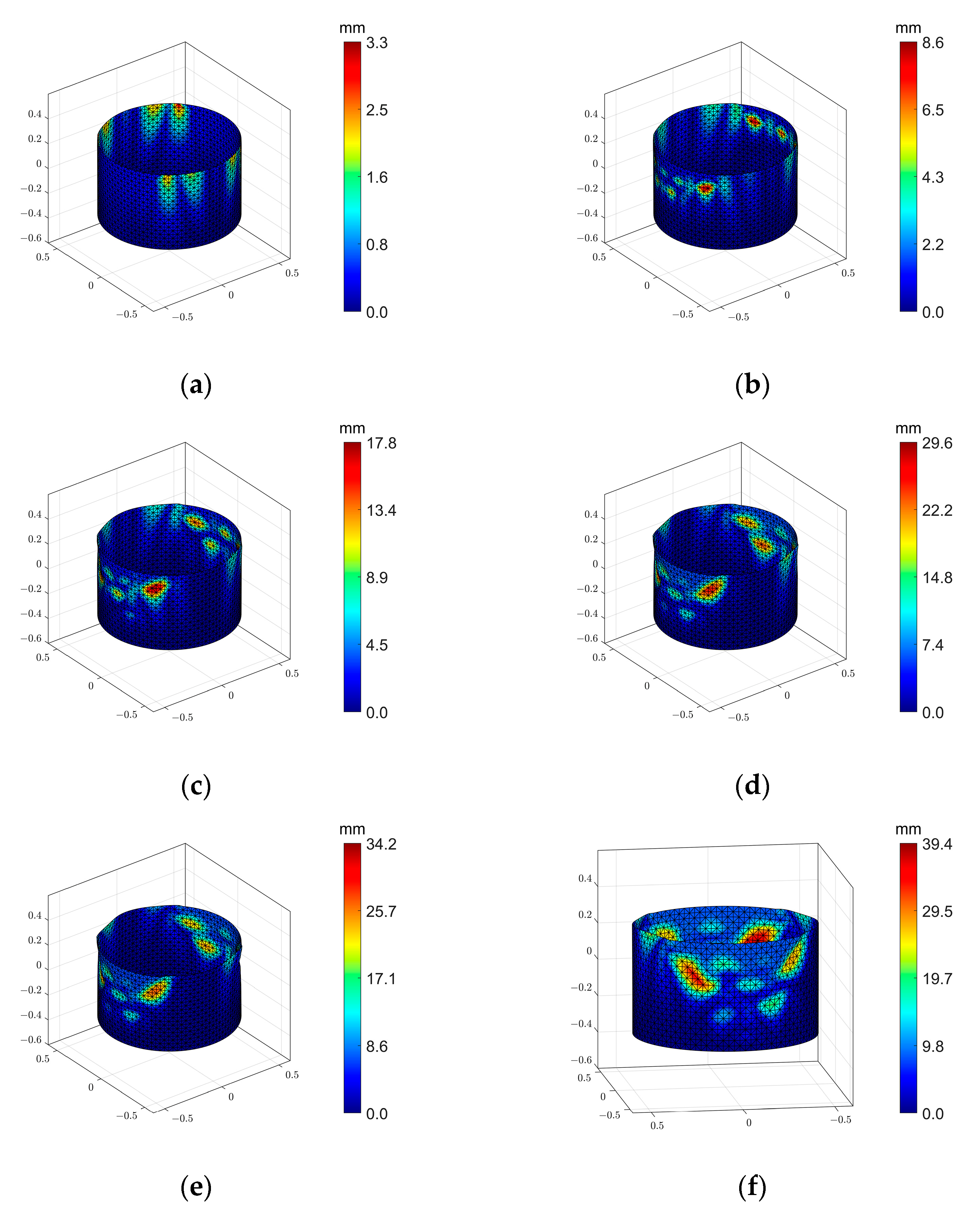
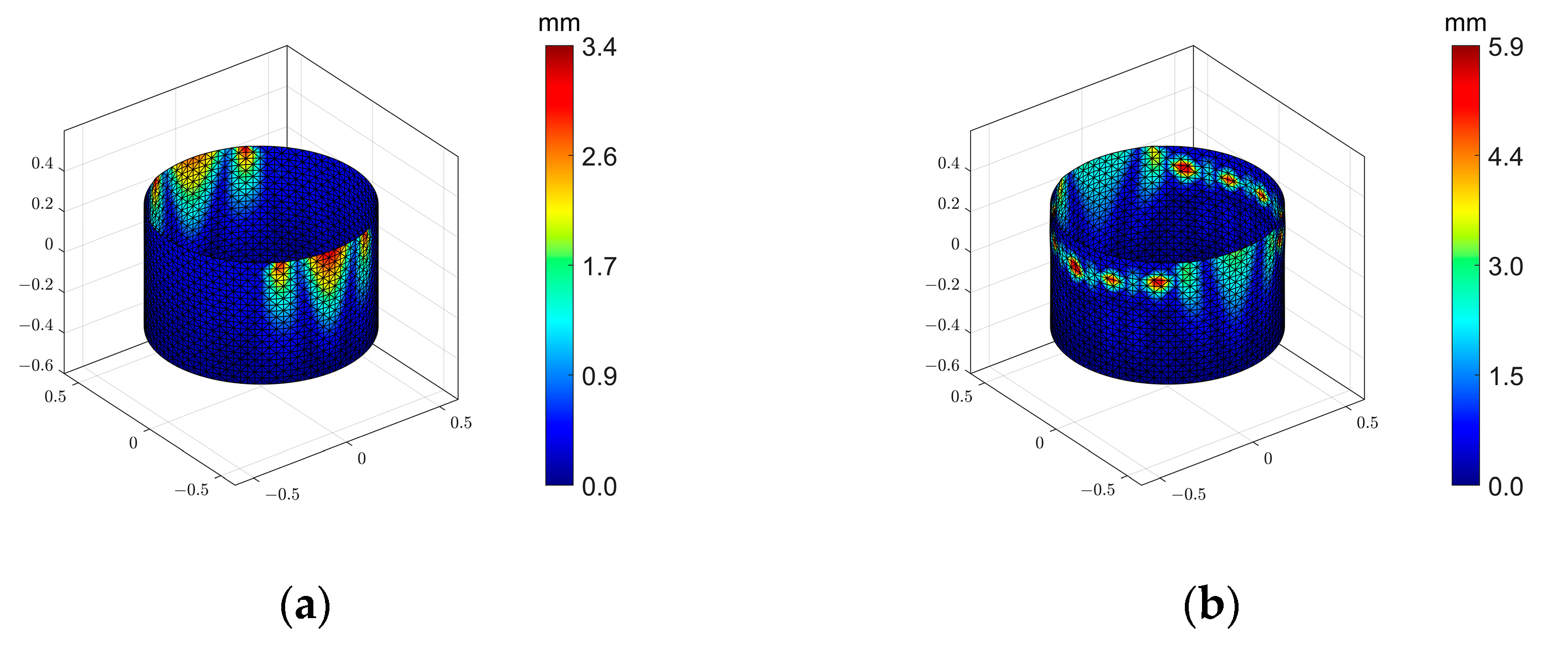
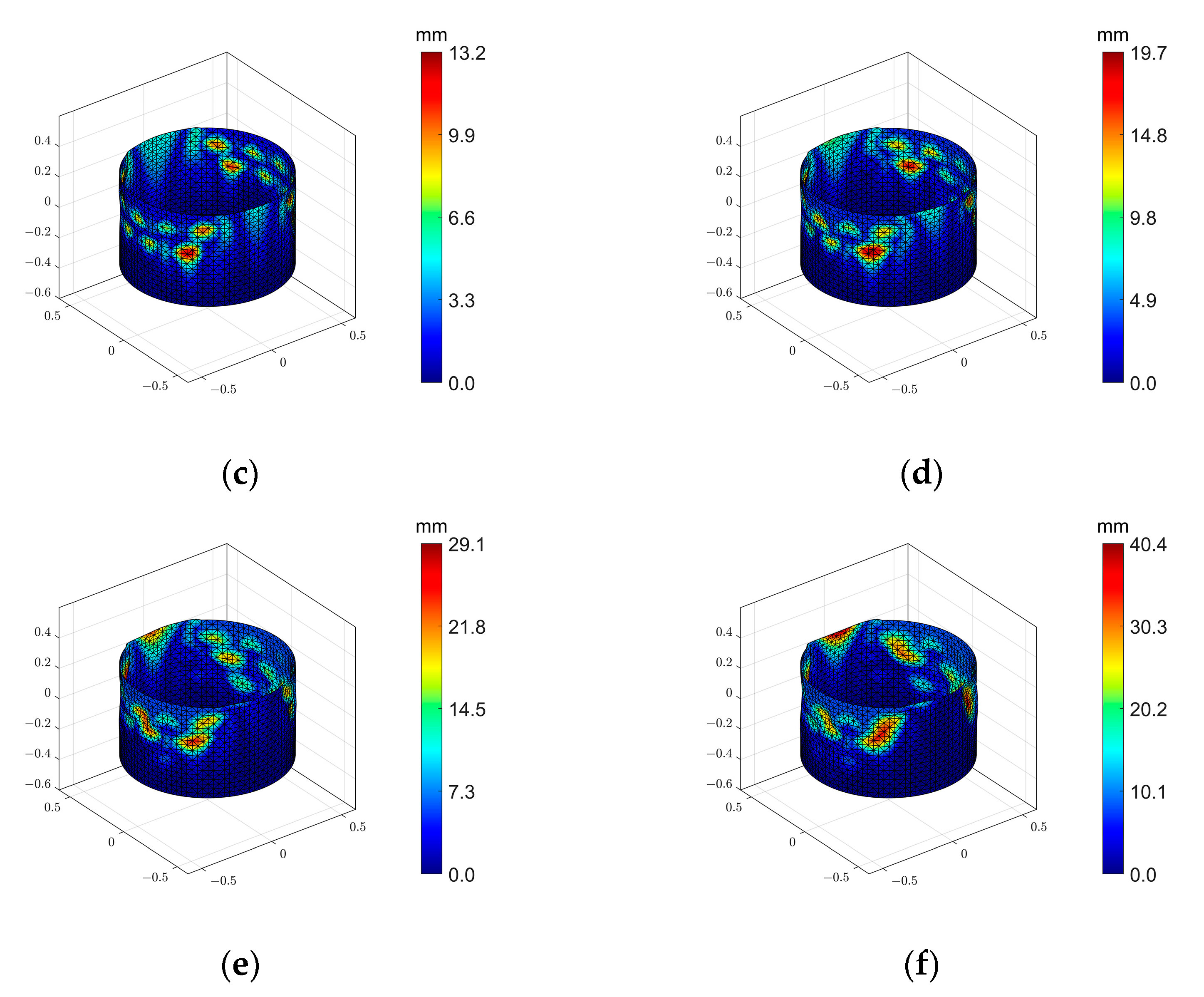
- The VFIFE introduces the multilinear hardening model, which predicts the first buckling load of the local axial compression tube with high accuracy, and the error between the simulation and experiment in this paper is less than 1%. For the buckling mode, after the first buckling occurs, the results of the VFIFE simulation are more consistent with the experiment, which verifies the effectiveness and accuracy of VFIFE in predicting structural buckling.
- (3)
- For the prediction of the postbuckling of structures, VFIFE has great advantages. Different from the complex settings of most commercial software based on FEM, VFIFE can directly predict the postbuckling behavior of structures under the action of force.
- (4)
- When a circular tube is subjected to local axial compression loads, the smaller the local axial compression angle, the smaller the buckling load will be. If the load is in the form of overall axial compression, the depression deformation will appear uniformly along the circular tube ring, while if the load is in the form of local axial compression, the depression will occur at the location of the load, and the rest of the location of the fold, so that the geometry of the force side of the circular tube becomes irregular, affecting the mechanical properties of the structure. Such situations should be avoided in engineering wherever possible.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wagner, H.N.R.; Hühne, C. Robust knockdown factors for the design of cylindrical shells under axial compression: Potentials, practical application and reliability analysis. Int. J. Mech. Sci. 2018, 135, 410–430. [Google Scholar] [CrossRef]
- Trivedi, N.; Singh, R.K. Fracture characterization studies of concrete structures through experiments on reinforced concrete cylindrical shell specimens. Ann. Nucl. Energy 2020, 140, 107338. [Google Scholar] [CrossRef]
- Su, R.; Li, X.; Xu, S.-Y. Axial behavior of circular CFST encased seawater sea-sand concrete filled PVC/GFRP tube columns. Construct. Build. Mater. 2022, 353, 129159. [Google Scholar] [CrossRef]
- Chung, C.-C.; Lee, K.-L.; Pan, W.-F. Collapse of Sharp-Notched 6061-T6 Aluminum Alloy Tubes under Cyclic Bending. Int. J. Struct. Stab. Dyn. 2016, 16, 1550035. [Google Scholar] [CrossRef]
- Horrigmoe, G.; Bergan, P.G. Nonlinear analysis of free-form shells by flat finite elements. Comput. Methods Appl. Mech. Eng. 1978, 16, 11–35. [Google Scholar] [CrossRef]
- Combescure, A.; Galletly, G.D. Plastic buckling of complete toroidal shells of elliptical cross-section subjected to internal pressure. Thin-Walled Struct. 1999, 34, 135–146. [Google Scholar] [CrossRef]
- Spagnoli, A.; Chryssanthopoulos, M.K. Elastic buckling and postbuckling behaviour of widely-stiffened conical shells under axial compression. Eng. Struct. 1999, 21, 845–855. [Google Scholar] [CrossRef]
- Abambres, M.; Camotim, D.; Silvestre, N. GBT-based elastic–plastic post-buckling analysis of stainless steel thin-walled members. Thin-Walled Struct. 2014, 83, 85–102. [Google Scholar] [CrossRef]
- Kadkhodayan, M.; Maarefdoust, M. Elastic/plastic buckling of isotropic thin plates subjected to uniform and linearly varying in-plane loading using incremental and deformation theories. Aerosp. Sci. Technol. 2014, 32, 66–83. [Google Scholar] [CrossRef]
- Song, C.Y.; Teng, J.G.; Rotter, J.M. Imperfection sensitivity of thin elastic cylindrical shells subject to partial axial compression. Int. J. Solids Struct. 2004, 41, 7155–7180. [Google Scholar] [CrossRef]
- Changyong, S. Buckling of un—Stiffened cylindrical shell under non—Uniform axial compressive stress. J. Zhejiang Univ. Sci. 2002, 3, 520–531. [Google Scholar] [CrossRef]
- Jiao, P.; Chen, Z.; Ma, H.; Ge, P.; Gu, Y.; Miao, H. Buckling behaviors of thin-walled cylindrical shells under localized axial compression loads, Part 1: Experimental study. Thin-Walled Struct. 2021, 166, 108118. [Google Scholar] [CrossRef]
- Jiao, P.; Chen, Z.; Ma, H.; Ge, P.; Gu, Y.; Miao, H. Buckling behaviors of thin-walled cylindrical shells under localized axial compression loads, Part 2: Numerical study. Thin-Walled Struct. 2021, 169, 108330. [Google Scholar] [CrossRef]
- Nassiraei, H.; Zhu, L.; Gu, C. Static capacity of collar plate reinforced tubular X-connections subjected to compressive loading: Study of geometrical effects and parametric formulation. Ships Offshore Struct. 2019, 16, 54–69. [Google Scholar] [CrossRef]
- Nassiraei, H.; Rezadoost, P. Static capacity of tubular X-joints reinforced with fiber reinforced polymer subjected to compressive load. Eng. Struct. 2021, 236, 112041. [Google Scholar] [CrossRef]
- Wu, C.; Lou, J.; He, L.; Du, J.; Wu, H. Buckling and Post-Buckling of Symmetric Functionally Graded Microplate Lying on Nonlinear Elastic Foundation Based on Modified Couple Stress Theory. Int. J. Struct. Stab. Dyn. 2018, 18, 1850110. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, J.; Di, C.; Zhan, M.; Wang, F. Buckling of Hydroformed Toroidal Pressure Hulls with Octagonal Cross-Sections. Metals 2022, 12, 1475. [Google Scholar] [CrossRef]
- Peng, Y.; Kong, Z.; Dinh, B.H.; Nguyen, H.-H.; Cao, T.-S.; Papazafeiropoulos, G.; Vu, Q.-V. Web Bend-Buckling of Steel Plate Girders Reinforced by Two Longitudinal Stiffeners with Various Cross-Section Shapes. Metals 2023, 13, 323. [Google Scholar] [CrossRef]
- Barham, W.S.; Idris, A.A. Flexibility-based large increment method for nonlinear analysis of Timoshenko beam structures controlled by a bilinear material model. Structures 2021, 30, 678–691. [Google Scholar] [CrossRef]
- Zhang, C.; Yang, X. Bilinear elastoplastic constitutive model with polyvinyl alcohol content for strain-hardening cementitious composite. Constr. Build. Mater. 2019, 209, 388–394. [Google Scholar] [CrossRef]
- Turkalj, G.; Lanc, D.; Brnic, J. Large displacement beam model for creep buckling analysis of framed structures. Int. J. Struct. Stab. Dyn. 2009, 9, 61–83. [Google Scholar] [CrossRef]
- Xiao, G.; Yang, X.; Qiu, J.; Chang, C.; Liu, E.; Duan, Q.; Shu, X.; Wang, Z. Determination of power hardening elastoplastic constitutive relation of metals through indentation tests with plural indenters. Mech. Mater. 2019, 138, 103173. [Google Scholar] [CrossRef]
- Lu, X.; Huang, F.; Zhao, B.; Keer, L.M. Contact Behaviors of Coated Asperity with Power-Law Hardening Elastic–Plastic Substrate During Loading and Unloading Process. Int. J. Appl. Mech. 2018, 10, 1850034. [Google Scholar] [CrossRef]
- Chen, L.; Yu, Y.; Song, W.; Wang, T.; Sun, W. Stability of geometrically imperfect struts with Ramberg-Osgood constitutive law. Thin-Walled Struct. 2022, 177, 109438. [Google Scholar] [CrossRef]
- Huang, Z.; Chen, Y.; Bai, S.-L. An Elastoplastic Constitutive Model for Porous Materials. Int. J. Appl. Mech. 2013, 5, 50035. [Google Scholar] [CrossRef]
- Mourlas, C.; Khabele, N.; Bark, H.A.; Karamitros, D.; Taddei, F.; Markou, G.; Papadrakakis, M. Effect of Soil–Structure Interaction on Nonlinear Dynamic Response of Reinforced Concrete Structures. Int. J. Struct. Stab. Dyn. 2020, 20, 2041013. [Google Scholar] [CrossRef]
- Ruocco, E.; Reddy, J.N. Buckling analysis of elastic–plastic nanoplates resting on a Winkler–Pasternak foundation based on nonlocal third-order plate theory. Int. J. Non-Linear Mech. 2020, 121, 103453. [Google Scholar] [CrossRef]
- Zhou, W.; Shi, Z.; Li, Y.; Rong, Q.; Zeng, Y.; Lin, J. Elastic-plastic buckling analysis of stiffened panel subjected to global bending in forming process. Aerosp. Sci. Technol. 2021, 115, 106781. [Google Scholar] [CrossRef]
- Zou, Z.; Liu, D.; Song, C.; Jin, M.; Guo, B.; Zhang, H. Elastic-Plastic Finite Element New Method for Lower Bound Shakedown Analysis. Int. J. Struct. Stab. Dyn. 2022, 22, 2250171. [Google Scholar] [CrossRef]
- Shih, C.; Wang, Y.-K.; Ting, E.C. Fundamentals of a Vector Form Intrinsic Finite Element: Part III. Convected Material Frame and Examples. J. Mech. 2011, 20, 133–143. [Google Scholar] [CrossRef]
- Ting, E.C.; Shih, C.; Wang, Y.-K. Fundamentals of a Vector Form Intrinsic Finite Element: Part I. Basic Procedure and A Plane Frame Element. J. Mech. 2011, 20, 113–122. [Google Scholar] [CrossRef]
- Ting, E.C.; Shih, C.; Wang, Y.-K. Fundamentals of a Vector Form Intrinsic Finite Element: Part II. Plane Solid Elements. J. Mech. 2011, 20, 123–132. [Google Scholar] [CrossRef]
- Wu, H.; Zeng, X.; Xiao, J.; Yu, Y.; Dai, X.; Yu, J. Vector form intrinsic finite-element analysis of static and dynamic behavior of deep-sea flexible pipe. Int. J. Nav. Archit. Ocean Eng. 2020, 12, 376–386. [Google Scholar] [CrossRef]
- Wu, T.-Y.; Ting, E.C. Large deflection analysis of 3D membrane structures by a 4-node quadrilateral intrinsic element. Thin-Walled Struct. 2008, 46, 261–275. [Google Scholar] [CrossRef]
- Wu, T.-Y. Dynamic nonlinear analysis of shell structures using a vector form intrinsic finite element. Eng. Struct. 2013, 56, 2028–2040. [Google Scholar] [CrossRef]
- Zhen, W.; Yang, Z.; Xuelin, Y. Nonlinear behavior analysis of entity structure based on vector form intrinsic finite element. J. Build. Struct. 2015, 36, 133–140. [Google Scholar] [CrossRef]
- Wu, T.-Y.; Tsai, W.-C.; Lee, J.-J. Dynamic elastic–plastic and large deflection analyses of frame structures using motion analysis of structures. Thin-Walled Struct. 2009, 47, 1177–1190. [Google Scholar] [CrossRef]
- Zhen, W.; Yang, Z.; Xuelin, Y. Collision-contact, crack-fracture and penetration behavior analysis of thin-shell structures based on vector form intrinsic finite element. J. Build. Struct. 2016, 37, 53–59. [Google Scholar] [CrossRef]
- Zhen, W.; Yang, z.; Xuelin, Y. Vector form intrinsic finite element method for buckling analysis of thin-shell structures. J. Cent. South Univ. (Sci. Technol.) 2016, 47, 2058–2064. [Google Scholar]
- Zhen, W.; Yang, Z.; Xuelin, Y. Analisis of buckling behavior of planar membrane structures based on vector form intrinsic finite element. J. Zhejiang Univ. (Eng. Sci.) 2015, 49, 1116–1122. [Google Scholar]
- Xu, L.; Lin, M. Analysis of buried pipelines subjected to reverse fault motion using the vector form intrinsic finite element method. Soil Dyn. Earthq. Eng. 2017, 93, 61–83. [Google Scholar] [CrossRef] [Green Version]
- Yu, Y.; Li, Z.; Yu, J.; Xu, L.; Zhao, M.; Cui, Y.; Wu, H.; Duan, Q. Buckling analysis of subsea pipeline with integral buckle arrestor using vector form intrinsic finite thin shell element. Thin-Walled Struct. 2021, 164, 107533. [Google Scholar] [CrossRef]
- Yu, Y.; Li, Z.; Yu, J.; Xu, L.; Cheng, S.; Wu, J.; Wang, H.; Xu, W. Buckling failure analysis for buried subsea pipeline under reverse fault displacement. Thin-Walled Struct. 2021, 169, 108350. [Google Scholar] [CrossRef]
- The OpenMP API Specification for Parallel Programming. Available online: https://www.openmp.org (accessed on 1 June 2022).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Meshing Size/mm | Buckling Load/kN | Error/% |
|---|---|---|
| 50 | 272.7 | 5.50 |
| 40 | 263.6 | 2.24 |
| 30 | 258.6 | 0.35 |
| 20 | 258.1 | 0.15 |
| Axial Compression Angle | Experiment/kN | VFIFE/kN | Error/% |
|---|---|---|---|
| 2 × 30° | 138.9 | 137.9 | 0.72 |
| 2 × 60° | 191.0 | 192.3 | 0.68 |
| 2 × 90° | 257.7 | 256.9 | 0.31 |
| 2 × 120° | 310.3 | 313.1 | 0.99 |
| 2 × 150° | 409.1 | 406.3 | 0.68 |
| 2 × 180° | 466.3 | 468.4 | 0.45 |
| Angle | Experiment | VFIFE |
|---|---|---|
| 2 × 90° |  |  |
| 2 × 120° |  |  |
| 2 × 180° |  |  |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, W.; Sun, Z.; Wu, H.; Xu, L.; Zeng, Y.; Wang, Y.; Huang, G. Buckling Analysis of Thin-Walled Circular Shells under Local Axial Compression using Vector Form Intrinsic Finite Element Method. Metals 2023, 13, 564. https://doi.org/10.3390/met13030564
Ma W, Sun Z, Wu H, Xu L, Zeng Y, Wang Y, Huang G. Buckling Analysis of Thin-Walled Circular Shells under Local Axial Compression using Vector Form Intrinsic Finite Element Method. Metals. 2023; 13(3):564. https://doi.org/10.3390/met13030564
Chicago/Turabian StyleMa, Wenliang, Zihan Sun, Han Wu, Leige Xu, Yong Zeng, Yanxing Wang, and Guangyin Huang. 2023. "Buckling Analysis of Thin-Walled Circular Shells under Local Axial Compression using Vector Form Intrinsic Finite Element Method" Metals 13, no. 3: 564. https://doi.org/10.3390/met13030564