
A Sharp-Interface Model of the Diffusive Phase Transformation in a Nickel-Based Superalloy


Abstract
:
1. Introduction
- Do not artificially thicken the interface in order to reduce mesh resolution to a tractable level (unlike CH-type models)
- Offer a good pathway for further verification of phase transformation models
- Offer low computational cost in the framework of finite elements compared to CH-type models.
2. Free Boundary Problem
3. Constitutive Assumptions in the Bulk
4. Numerical Method
4.1. Balance of Linear Momentum and Approximation of the Displacement Field
- It is only active within the enriched elements; thus, no blending is required.
- The condition number of the system matrix does not significantly increase compared to the condition number of a similar FE problem without any enrichments. This also holds if elements are barely intersected by the interface.
4.2. Computing Input Quantities for the Gibbs–Thomson Equation
4.3. Approximation of the Concentration Field
4.4. Computing the Normal Interface Velocity
4.5. Surface Tracking
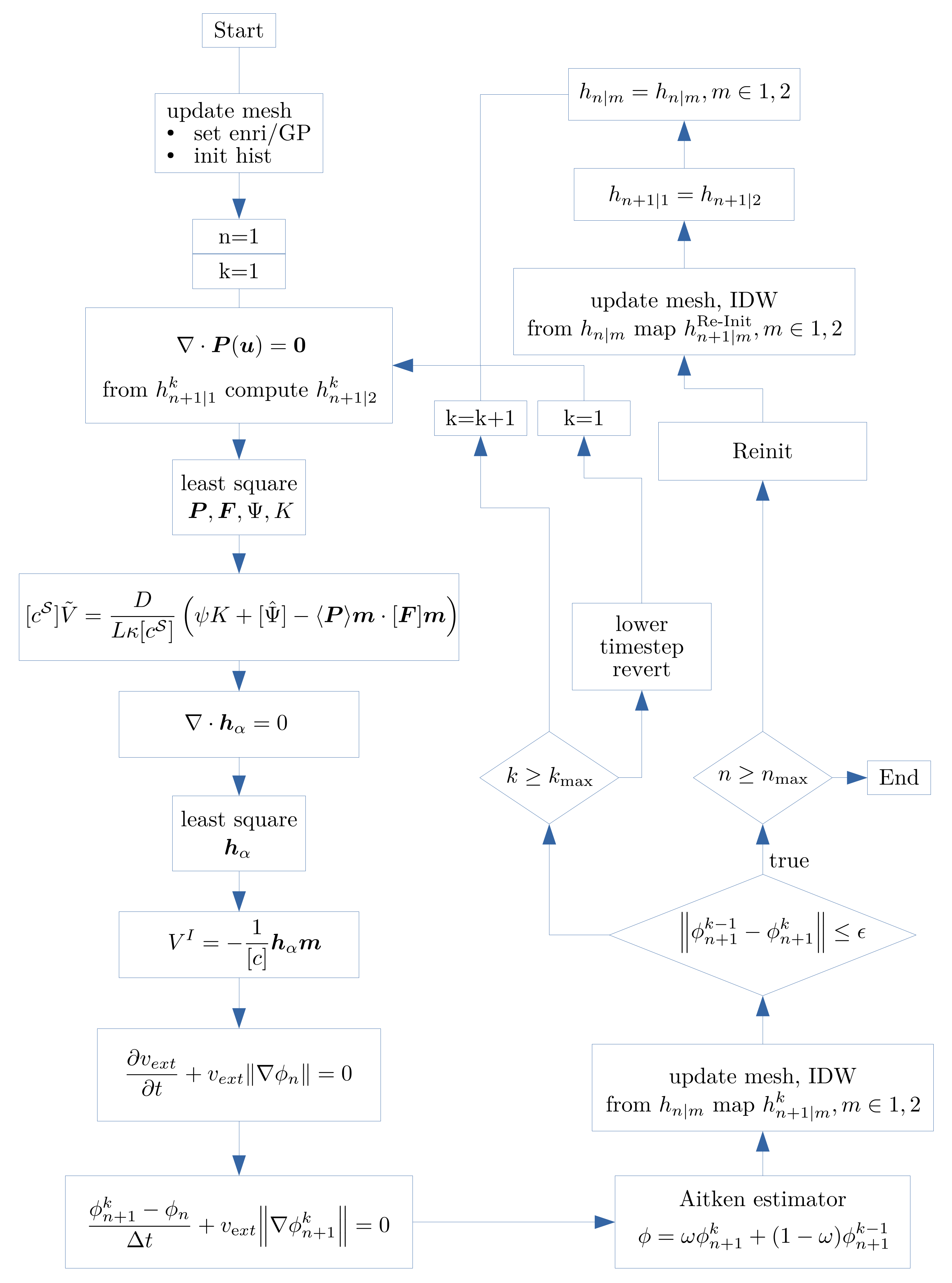
4.6. Staggered Solution Scheme
- The old point is on the same side of the interface as the new point.
- The side is determined by the sign of the updated new level set.
5. Numerical Results
5.1. Elastic Matrix
- with ,
- with ,
- with
5.2. Ostwald Ripening
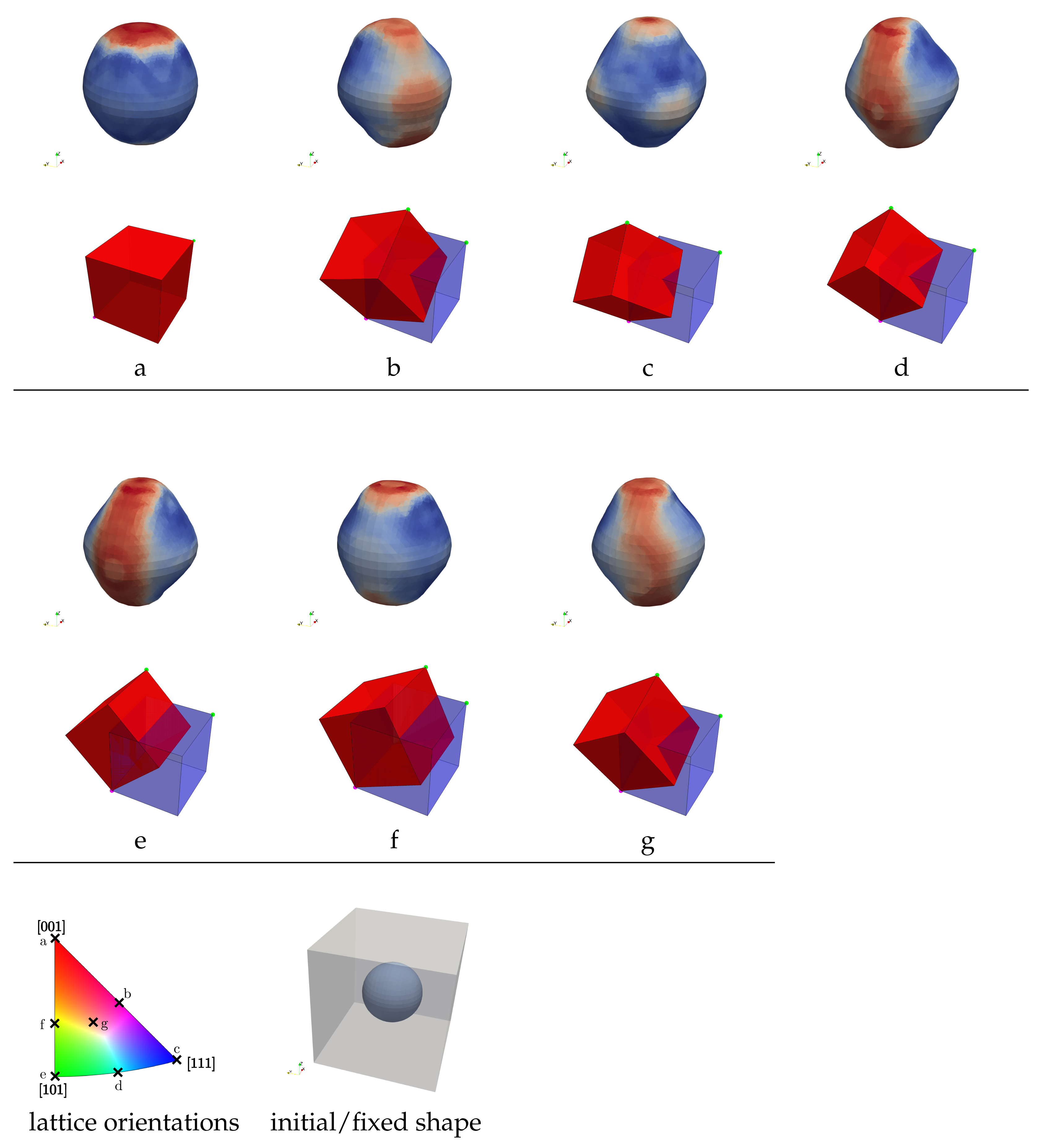
5.3. Ductile Matrix
- with (base symmetry plane).
- and with (x-axis fixed in y-direction).
- and with (y-axis fixed in x-direction).
- The precipitate volume fraction is increased.
- The phase transformation leads to changes in topology.
6. Conclusions and Outlook
- A SI model for phase transformations was extended by a path-dependent non-linear crystal plasticity model.
- The model captures cuboidal equilibrium shapes and Ostwald ripening.
- By solving the diffusion equation explicitly, the transport of solute atoms within the -matrix can be visualized.
- By introducing a crystal plasticity model the precipitate’s shape is qualitatively altered due to the anisotropy of the material’s mechanical response.
- For isolated precipitates, the shape changes do not influence the global mechanical behaviour, as was confirmed by simulations with a fixed interface.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Slip System i | ||
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| 6 | ||
| 7 | ||
| 8 | ||
| 9 | ||
| 10 | ||
| 11 | ||
| 12 |
References
- Matan, N.; Cox, D.; Carter, P.; Rist, M.; Rae, C.; Reed, R. Creep of cmsx-4 superalloy single crystals: Effects of misorientation and temperature. Acta Mater. 1999, 47, 1549–1563. Available online: http://www.sciencedirect.com/science/article/pii/S1359645499000294 (accessed on 2 April 2022). [CrossRef]
- McLean, M. The contribution of friction stress to the creep behaviour of the nickel-base in situ composite, γ—γ’-cr3c2. Proc. R. Soc. Lond. A. Math. Phys. Sci. 1980, 373, 93–109. [Google Scholar]
- Dyson, B.F. Microstructure based creep constitutive model for precipitation strengthened alloys: Theory and application. Mater. Sci. Technol. 2009, 25, 213–220. [Google Scholar] [CrossRef]
- Zhu, Z.; Basoalto, H.; Warnken, N.; Reed, R. A model for the creep deformation behaviour of nickel-based single crystal superalloys. Acta Mater. 2012, 60, 4888–4900. Available online: http://www.sciencedirect.com/science/article/pii/S1359645412003333 (accessed on 2 April 2022). [CrossRef]
- Shenoy, M.; Tjiptowidjojo, Y.; McDowell, D. Microstructure-sensitive modeling of polycrystalline {IN} 100. Int. J. Plast. 2008, 24, 1694–1730. Available online: http://www.sciencedirect.com/science/article/pii/S0749641908000120 (accessed on 2 April 2022). [CrossRef]
- le Graverend, J.-B.; Cormier, J.; Gallerneau, F.; Villechaise, P.; Kruch, S.; Mendez, J. A microstructure-sensitive constitutive modeling of the inelastic behavior of single crystal nickel-based superalloys at very high temperature. Int. J. Plast. 2014, 59, 55–83. Available online: http://www.sciencedirect.com/science/article/pii/S0749641914000473 (accessed on 2 April 2022). [CrossRef]
- Zhou, J.; He, Y.; Shen, J.; Essa, F.A.; Yu, J. Ni/Ni3Al interface-dominated nanoindentation deformation and pop-in events. Nanotechnology 2021, 33, 105703. Available online: https://iopscience.iop.org/article/10.1088/1361-6528/ac3d62 (accessed on 2 April 2022). [CrossRef]
- Zhao, Y. Stability of phase boundary between L12-Ni3Al phases: A phase field study. Intermetallics 2022, 144, 107528. [Google Scholar] [CrossRef]
- Jokisaari, A.M.; Naghavi, S.S.; Wolverton, C.; Voorhees, P.W.; Heinonen, O.G. Predicting the morphologies of γ precipitates in cobalt-based superalloys. Acta Mater. 2017, 141, 273–284. [Google Scholar] [CrossRef]
- Tsukada, Y.; Koyama, T.; Kubota, F.; Murata, Y.; Kondo, Y. Phase-field simulation of rafting kinetics in a nickel-based single crystal superalloy. Intermetallics 2017, 85, 187–196. Available online: http://www.sciencedirect.com/science/article/pii/S0966979516305337 (accessed on 2 April 2022). [CrossRef]
- Ali, M.A.; Amin, W.; Shchyglo, O.; Steinbach, I. 45-degree rafting in ni-based superalloys: A combined phase-field and strain gradient crystal plasticity study. Int. J. Plast. 2020, 128, 102659. [Google Scholar] [CrossRef]
- Schmidt, I.; Gross, D. The equilibrium shape of an elastically inhomogeneous inclusion. J. Mech. Phys. Solids 1997, 45, 1521–1549. Available online: http://www.sciencedirect.com/science/article/pii/S0022509697000112 (accessed on 2 April 2022). [CrossRef]
- Zhao, X.; Duddu, R.; Bordas, S.; Qu, J. Effects of elastic strain energy and interfacial stress on the equilibrium morphology of misfit particles in heterogeneous solids. J. Mech. Phys. Solids 2013, 61, 1433–1445. [Google Scholar] [CrossRef]
- Munk, L.; Reschka, S.; Loehnert, S.; Maier, H.J.; Wriggers, P. A sharp-interface model for diffusional evolution of precipitates in visco-plastic materials. Comput. Methods Appl. Mech. Eng. 2021, in press. [Google Scholar] [CrossRef]
- Gurtin, M.E. Configurational Forces as Basic Concepts of Continuum Physics; Springer Science & Business Media: Berlin, Germany, 1999; Volume 137. [Google Scholar]
- Fried, E.; Gurtin, M.E. Coherent solid-state phase transitions with atomic diffusion: A thermomechanical treatment. J. Stat. Phys. 1999, 95, 1361–1427. [Google Scholar] [CrossRef]
- Leo, P.; Sekerka, R. Overview no. 86: The effect of surface stress on crystal-melt and crystal-crystal equilibrium. Acta Metall. 1989, 37, 3119–3138. [Google Scholar] [CrossRef]
- Roters, F.; Eisenlohr, P.; Hantcherli, L.; Tjahjanto, D.; Bieler, T.; Raabe, D. Overview of constitutive laws, kinematics, homogenization and multiscale methods in crystal plasticity finite-element modeling: Theory, experiments, applications. Acta Mater. 2010, 58, 1152–1211. Available online: http://www.sciencedirect.com/science/article/pii/S1359645409007617 (accessed on 2 April 2022). [CrossRef]
- Knowles, D.; Gunturi, S. The role of < 112>{111} slip in the asymmetric nature of creep of single crystal superalloy cmsx-4. Mater. Sci. Eng. A 2002, 328, 223–237. [Google Scholar]
- Sass, V.; Glatzel, U.; Feller-Kniepmeier, M. Anisotropic creep properties of the nickel-base superalloy cmsx-4. Acta Mater. 1996, 44, 1967–1977. [Google Scholar] [CrossRef]
- Voskoboinikov, R. Effective γ-surfaces in {111} plane in fcc ni and l1 2 ni 3 al intermetallic compound. Phys. Met. Metallogr. 2013, 114, 545–552. [Google Scholar] [CrossRef]
- Fedorov, F.I. Theory of Elastic Waves in Crystals; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Wiedersich, H. Hardening mechanisms and the theory of deformation. JOM 1964, 16, 425–430. [Google Scholar] [CrossRef]
- Belytschko, T.; Black, T. Elastic crack growth in finite elements with minimal remeshing. Int. J. Numer. Methods Eng. 1999, 45, 601–620. [Google Scholar] [CrossRef]
- Moës, N.; Cloirec, M.; Cartraud, P.; Remacle, J.-F. A computational approach to handle complex microstructure geometries. Comput. Methods Appl. Mech. Eng. 2003, 192, 3163–3177. [Google Scholar] [CrossRef]
- Babuška, I.; Banerjee, U. Stable generalized finite element method (sgfem). Comput. Methods Appl. Mech. Eng. 2012, 201, 91–111. [Google Scholar] [CrossRef]
- Lekien, F.; Marsden, J. Tricubic interpolation in three dimensions. Int. J. Numer. Methods Eng. 2005, 63, 455–471. [Google Scholar] [CrossRef]
- Osher, S.; Sethian, J.A. Fronts propagating with curvature-dependent speed: Algorithms based on hamilton-jacobi formulations. J. Comput. Phys. 1988, 79, 12–49. Available online: http://www.sciencedirect.com/science/article/pii/0021999188900022 (accessed on 2 April 2022). [CrossRef]
- Brooks, A.N.; Hughes, T.J. Streamline upwind Petrov-Galerkin formulations for convection dominated flows with particular emphasis on the incompressible Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 1982, 32, 199–259. [Google Scholar] [CrossRef]
- Sauerland, H.; Fries, T.-P. The extended finite element method for two-phase and free-surface flows: A systematic study. J. Comput. Phys. 2011, 230, 3369–3390. [Google Scholar] [CrossRef]
- Lifshitz, I.M.; Slyozov, V.V. The kinetics of precipitation from supersaturated solid solutions. J. Phys. Chem. Solids 1961, 19, 35–50. [Google Scholar] [CrossRef]
- Nitz, A.; Lagerpusch, U.; Nembach, E. CRSS anisotropy and tension/compression asymmetry of a commercial superalloy. Acta Mater. 1998, 46, 4769–4779. [Google Scholar] [CrossRef]
- Jacome, L.A.; Nörtershäuser, P.; Heyer, J.-K.; Lahni, A.; Frenzel, J.; Dlouhy, A.; Somsen, C.; Eggeler, G. High-temperature and low-stress creep anisotropy of single-crystal superalloys. Acta Mater. 2013, 61, 2926–2943. [Google Scholar] [CrossRef]









| Elastic | and | Transformation | and |
|---|---|---|---|
| D | |||
| L | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Munk, L.; Reschka, S.; Maier, H.J.; Wriggers, P.; Löhnert, S. A Sharp-Interface Model of the Diffusive Phase Transformation in a Nickel-Based Superalloy. Metals 2022, 12, 1261. https://doi.org/10.3390/met12081261
Munk L, Reschka S, Maier HJ, Wriggers P, Löhnert S. A Sharp-Interface Model of the Diffusive Phase Transformation in a Nickel-Based Superalloy. Metals. 2022; 12(8):1261. https://doi.org/10.3390/met12081261
Chicago/Turabian StyleMunk, Lukas, Silvia Reschka, Hans Jürgen Maier, Peter Wriggers, and Stefan Löhnert. 2022. "A Sharp-Interface Model of the Diffusive Phase Transformation in a Nickel-Based Superalloy" Metals 12, no. 8: 1261. https://doi.org/10.3390/met12081261