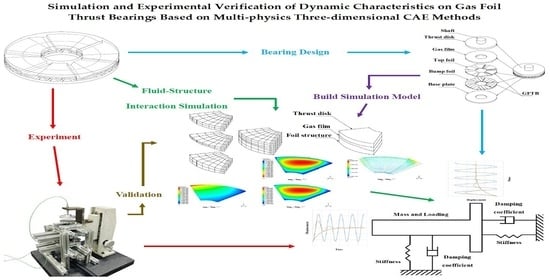
Simulation and Experimental Verification of Dynamic Characteristics on Gas Foil Thrust Bearings Based on Multi-Physics Three-Dimensional Computer Aided Engineering Methods


Abstract
:
1. Introduction
2. Multi-Physics Problem in GFTBs
3. CAE Simulation Method Using Multi-Physics Modules
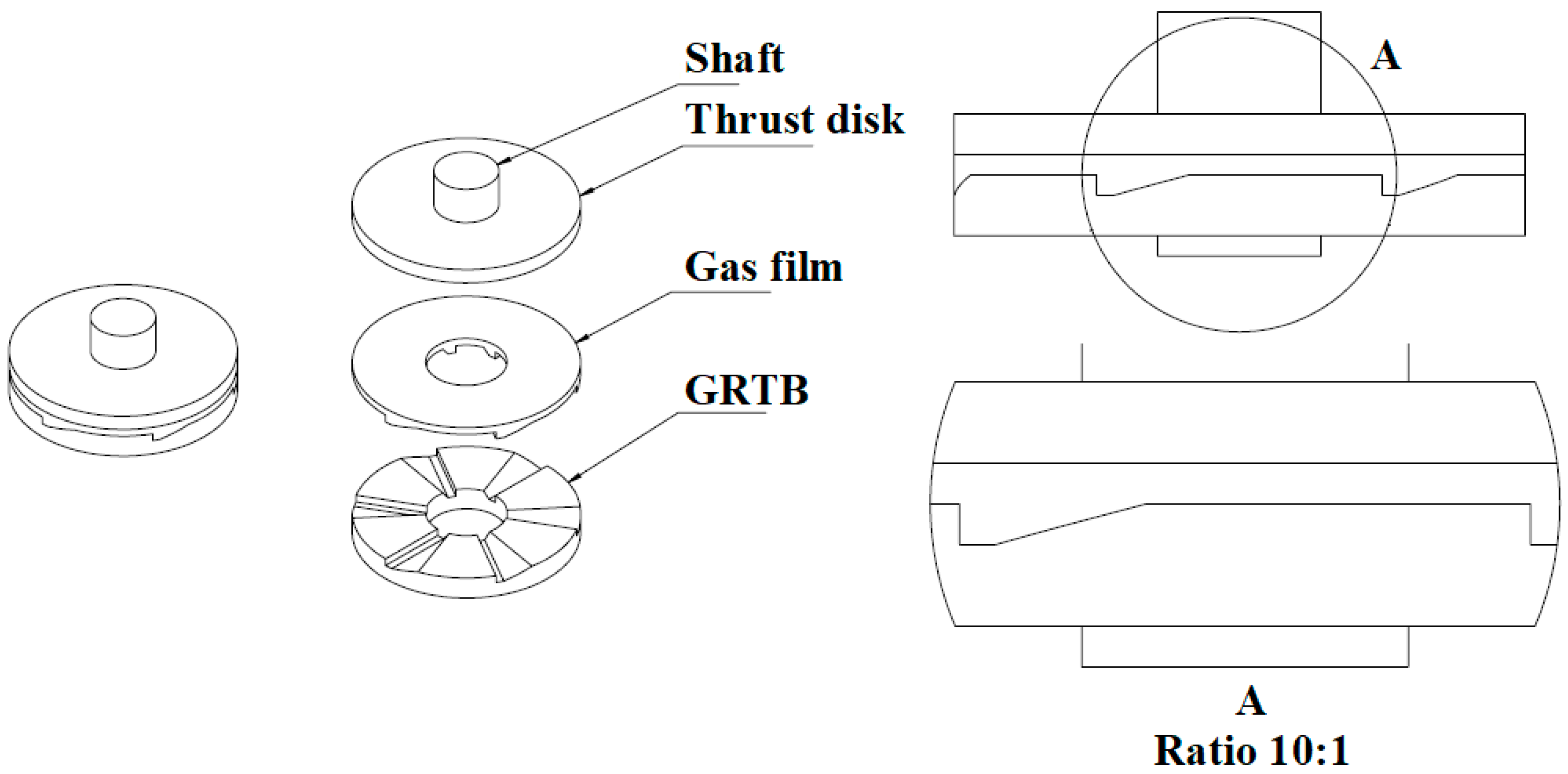
3.1. Basic Geometric Model
3.2. Model Meshing and Boundary Conditions
3.3. Experimental Verifications of the GRTB
4. FSI Computational Environment
4.1. Analysis Process for Transient Dynamic GFTB
4.2. Model Meshing and Boundary Conditions
4.3. Dynamic Simulation Results for Single-Side GFTBs
4.4. Mass Spring Dashpot Model for GFTBs
5. Case Study: Clamped-Rotor GFTB Design
6. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations | |
| 3D | Three-dimensional |
| CAE | Computer-aided engineering |
| DUT | Device under test |
| GFBs | Gas foil bearings |
| GFTBs | Gas foil thrust bearings |
| GRTBs | Gas rigid thrust bearings |
| HGFBs | Hybrid gas foil bearing |
| Notation | |
| A0 | Initial displacement, m |
| c | Damping coefficient, N·s/m |
| h | Film height, m |
| k | Stiffness, N/m |
| m | Mass, kg |
| p | Aerodynamic pressure, Pa |
| u | Tangential velocity, m/s |
| t | Time, s |
| x | Normal coordinates in cylindrical coordinate system or displacement, m |
| y | Tangential coordinates in cylindrical coordinate system, m |
| z | Bearing axial coordinate in cylindrical coordinate system, m |
| Greek symbols | |
| μ | Dynamic viscosity, Pa-s |
| ρ | Lubricant density, kg/m3 |
References
- Peng, J.P.; Carpino, M. Calculation of Stiffness and Damping Coefficients for Elastically Supported Gas Foil Bearings. ASME J. Tribol. 1993, 115, 20–27. [Google Scholar] [CrossRef]
- Carpino, M.; Talmage, G. A Fully Coupled Finite Element Formulation for Elastically Supported Foil Journal Bearings. STLE Tribol. Trans. 2003, 46, 560–565. [Google Scholar] [CrossRef]
- Carpino, M.; Talmage, G. Prediction of Rotor Dynamic Coefficients in Gas Lubricated Foil Journal Bearings with Corrugated Sub-Foils. STLE Tribol. Trans. 2006, 49, 400–409. [Google Scholar] [CrossRef]
- San Andrés, L.; Kim, T.H. Improvements to the Analysis of Gas Foil Bearings: Integration of Top Foil 1D and 2D Structural Models; Paper No. GT2007-27249; ASME: New York, NY, USA, 2007. [Google Scholar]
- Kim, T.H.; San Andrés, L. Analysis of Advanced Gas Foil Bearings with Piecewise Linear Elastic Supports. Tribol. Int. 2007, 40, 1239–1245. [Google Scholar] [CrossRef]
- Ku, C.-R.; Heshmat, H. Compliant Foil Bearing Structural Stiffness Analysis: Part I—Theoretical Model Including Strip and Variable Bump Foil Geometry. ASME J. Tribol. 1992, 114, 394–400. [Google Scholar] [CrossRef]
- Lee, D.; Kim, Y.; Kim, T. The Dynamic Performance Analysis of Foil Journal Bearings Considering Coulomb Friction: Rotating Unbalance Response. STLE Tribol. Trans. 2009, 52, 146–156. [Google Scholar] [CrossRef]
- Kim, D. Parametric Studies on Static and Dynamic Performance of Air Foil Bearings with Different Top Foil Geometries and Bump Stiffness Distributions. ASME J. Tribol. 2007, 129, 354–364. [Google Scholar] [CrossRef]
- Le Lez, S.; Arghir, M.; Frene, J. Static and Dynamic Characterization of a Bump-Type Foil Bearing Structure. ASME J. Tribol. 2007, 129, 75–83. [Google Scholar] [CrossRef]
- Heshmat, H. Advancements in the Performance of Aerodynamic Foil Journal Bearings: High Speed and Load Capacity. ASME J. Tribol. 1994, 116, 287–295. [Google Scholar] [CrossRef]
- Song, J.; Kim, D. Foil Gas Bearing with Compression Springs: Analyses and Experiments. ASME J. Tribol. 2007, 129, 628–639. [Google Scholar] [CrossRef]
- Heshmat, H. Operation of Foil Bearings Beyond the Bending Critical Mode. ASME J. Tribol. 2000, 122, 192–198. [Google Scholar] [CrossRef]
- Howard, S.A.; DellaCorte, C. Steady-State Stiffness of Foil Air Journal Bearings at Elevated Temperatures. STLE Tribol. Trans. 2001, 44, 489–493. [Google Scholar] [CrossRef]
- Howard, S.A.; DellaCorte, C. Dynamic Stiffness and Damping Characteristics of a High-Temperature Air Foil Journal Bearing. STLE Tribol. Trans. 2001, 44, 657–663. [Google Scholar] [CrossRef]
- Lubell, D.; DellaCorte, C.; Stanford, M. Test Evolution and Oil-Free Engine Experience of a High Temperature Foil Air Bearing Coating; Paper No. GT2006-90572; ASME: New York, NY, USA, 2006. [Google Scholar]
- Radil, K.; Howard, S.; Dykas, B. The Role of Radial Clearance on the Performance of Foil Air Bearings. STLE Tribol. Trans. 2002, 45, 485–490. [Google Scholar] [CrossRef]
- Dykas, B.; Howard, S.A. Journal Design Considerations for Turbomachine Shafts Supported on Foil Air Bearings. STLE Tribol. Trans. 2004, 47, 508–516. [Google Scholar] [CrossRef]
- Lee, D.; Kim, D. Thermo-Hydrodynamic Analyses of Bump Air Foil Bearings with Detailed Thermal Model of Foil Structures and Rotor. ASME J. Tribol. 2010, 132, 021704. [Google Scholar] [CrossRef]
- San Andrés, L.; Kim, T.H. Thermohydrodynamic Analysis of Bump Type Gas Foil Bearings: A Model Anchored to Test Data; Paper No. GT2009-59919; ASME: New York, NY, USA, 2009. [Google Scholar]
- Peng, Z.C.; Khonsari, M. A Thermohydrodynamic Analysis of Foil Journal Bearings. ASME J. Tribol. 2006, 128, 534–541. [Google Scholar] [CrossRef]
- Feng, K.; Kaneko, S. A Study of Thermohydrodynamic Features of Multiwound Foil Bearing Using Lobatto Point Quadrature; Paper No. GT2008-50110; ASME: New York, NY, USA, 2008. [Google Scholar]
- Martowicz, A.; Zdziebko, P.; Roemer, J.; Zywica, G.; Baginski, P. Thermal Characterization of a Gas Foil Bearing—A Novel Method of Experimental Identification of the Temperature Field Based on Integrated Thermocouples Measurements. Sensors 2022, 22, 5718. [Google Scholar] [CrossRef]
- Hou, Y.; Zhao, Q.; Guo, Y.; Ren, X.; Lai, T.; Chen, S. Application of Gas Foil Bearings in China. Appl. Sci. 2021, 11, 6210. [Google Scholar] [CrossRef]
- Liu, X.; Li, C.; Du, J.; Nan, G. Thermal Characteristics Study of the Bump Foil Thrust Gas Bearing. Appl. Sci. 2021, 11, 4311. [Google Scholar] [CrossRef]
- Heshmat, H.; Walowit, J.A.; Pinkus, O. Analysis of Gas Lubricated Compliant Thrust Bearings. ASME J. Lubr. Technol. 1983, 105, 638–646. [Google Scholar] [CrossRef]
- Heshmat, C.A.; Xu, D.S.; Heshmat, H. Analysis of Gas Lubricated Foil Thrust Bearings Using Coupled Finite Element and Finite Difference Methods. ASME J. Tribol. 2000, 122, 199–204. [Google Scholar] [CrossRef]
- Iordanoff, I. Analysis of an Aerodynamic Compliant Foil Thrust Bearing: Method for a Rapid Design. ASME J. Tribol. 1999, 121, 816–822. [Google Scholar] [CrossRef]
- Bruckner, R.J. Simulation and Modeling of the Hydrodynamic, Thermal, and Structural Behavior of Foil Thrust Bearings. Ph.D. Thesis, Case Western Reserve University, Cleveland, OH, USA, 2004. [Google Scholar]
- Dykas, B.; Bruckner, R.J.; DellaCorte, C.; Edmonds, B.; Prahl, J. Design, Fabrication, and Performance of Foil Gas Thrust Bearings for Microturbomachinery Applications; Paper No. GT2008-50377; ASME: New York, NY, USA, 2008. [Google Scholar]
- Park, D.J.; Kim, C.H.; Jang, G.H.; Lee, Y.B. Theoretical Considerations of Static and Dynamic Characteristics of Air Foil Thrust Bearing with Tilt and Slip Flow. Tribol. Int. 2008, 41, 282–295. [Google Scholar] [CrossRef]
- DellaCorte, C.; Edmonds, B.J. Preliminary Evaluation of PS300: A New Self-Lubricating High Temperature Composite Coating for Use to 800 °C; Technical Report No. NASA TM-107056; NASA: Greenbelt, MD, USA, 1995. [Google Scholar]
- Stanford, M.K.; Yanke, A.M.; DellaCorte, C. Thermal Effects on a Low Cr Modification of PS304 Solid Lubricant Coating; Technical Report No. NASA TM-2003-213111; NASA: Greenbelt, MD, USA, 2004. [Google Scholar]
- Kim, D.; Park, S. Hydrostatic Air Foil Bearings: Analytical and Experimental Investigations. Tribol. Int. 2009, 42, 413–425. [Google Scholar] [CrossRef]
- Kim, D.; Kumar, M. Load Capacity Measurements of Hydrostatic Bump Foil Bearing; Paper No. T2009-T59286; ASME: New York, NY, USA, 2009. [Google Scholar]
- Kumar, M.; Kim, D. Parametric Studies on Dynamic Performance of Hybrid Air Foil Bearings. ASME J. Eng. Gas Turbines Power 2008, 130, 62501. [Google Scholar] [CrossRef]
- Kim, D.; Lee, D. Design of Three-Pad Hybrid Air Foil Bearing and Experimental Investigation on Static Performance at Zero Running Speed. ASME J. Eng. Gas Turbines Power 2010, 132, 122504. [Google Scholar] [CrossRef]
- Constantinescu, V.N. Basic Relationships in Turbulent Lubrication and Their Extension to Include Thermal Effects. ASME J. Lubr. Technol. 1973, 95, 147–154. [Google Scholar] [CrossRef]
- Feng, K.; Kaneko, S. Analytical Model of Bump-Type Foil Bearings Using a Link-Spring Structure and a Finite-Element Shell Model. ASME J. Tribol. 2010, 132, 021706. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Edge Denotation | Length/Angle | Mesh Layers |
|---|---|---|
| A | 36.5 mm | NA |
| B | 11.0 mm | NA |
| C | 10 microns | 24 |
| D | 46.60° | 20 |
| E | 11.83° | 5 |
| F | 1.0 mm | 4 |
| G | 38 microns | 24 |
| H | 25.5 mm | 30 |
| Surface Name | Denotation | Boundary Condition | Value |
|---|---|---|---|
| Thrust disk contact surface | I | Rotational speed | 6–16 krpm |
| Interface of the neighbor gas film | J | Environment pressure | 1 Bar |
| Environment temperature | 293 K | ||
| GRTB contact surface | K | Fixed wall | Fixed |
| Ambient interface at outer edge of gas film | L | Environment pressure | 1 Bar |
| Environment temperature | 293 K | ||
| Interface of the last gas film | M | Environment pressure | 1 Bar |
| Environment temperature | 293 K | ||
| Ambient interface at inner edge of gas film | N | Environment pressure | 1 Bar |
| Environment temperature | 293 K |
| Edge Denotation | Length/Angle | Mesh Layers |
|---|---|---|
| O | 60° | 29 |
| P | 4 mm | 2 |
| Q | 0.8197mm | 4 |
| Region | Surface Name | Denotation | Boundary Condition | Value |
|---|---|---|---|---|
| Solid | Interface of the next part of the thrust disk | R | Free movement along axial direction | Axis Sym |
| Upper surface of the thrust disk | S | Free movement along axial direction | Free | |
| Outer surface of the thrust disk | T | Free movement along axial direction | Free | |
| Gas film contact surface in lower surface of thrust disk | U | Interface between thrust disk and gas film | Match | |
| Inner surface of the thrust disk | V | Free movement along axial direction | Free | |
| Interface of the previous pad of the thrust disk | W | Rotational symmetry | Axis Sym | |
| Fluid | Interface of the next pad’s gas film | X | Environment pressure | 2 Bar |
| Environment temperature | 323 K | |||
| Thrust disk contact surface | Y | Interface between thrust disk and gas film and rotational speed | Match | |
| Interface of the environment at outer edge of gas film | Z | Environment pressure | 2 Bar | |
| Environment temperature | 323 K | |||
| Interface of the environment at inner edge of gas film | AA | Environment pressure | 2 Bar | |
| Environment temperature | 323 K | |||
| GFTB contact surface of gas film | BB | Interface between foil structure and gas film | Match | |
| Interface of the last gas film | CC | Environment pressure | 2 Bar | |
| Environment temperature | 323 K | |||
| Solid | Gas film contact surface on upper surface of GFTBs | DD | Interface between foil structure and gas film | Match |
| Interface of the next pad of the GFTBs | EE | Free movement | Axis Sym | |
| Outer surface of the GFTB | FF | Free movement along axial direction | Free | |
| Lower fixed surface of the GFTBs | GG | Fixed wall | Fixed | |
| Inner surface of the GFTBs | HH | Free movement along axial direction | Free | |
| Interface of the last part of the GFTBs | II | Free movement along axial direction | Axis Sym |
| Parameter Definition | Parameter Values and Unit |
|---|---|
| Working fluid | Air (ideal gas model) |
| Initial gas film pressure | 2.0 (Bar) |
| Initial gas film temperature | 323 (K) |
| Environment pressure | 2.0 (Bar) |
| Environment temperature | 323 (K) |
| Foil structure stiffness | 0.1 (GPa) |
| Shaft rotational speed | 78.5 (krpm) |
| Heat transfer coefficient of surface of thrust disk and GFTBs | 100 (W·m−2·K−1) |
| Temperature of surface of thrust disk and GFTBs | 323 (K) |
| Shaft normal load | 200 (N) |
| Shaft mass | 1.0 (kg) |
| Initial distance between two GFTB surfaces (if there are two GFTBs in the model) | 4.02, 4.025, 4.03,4.035, 4.04, 4.05, 4.06 (mm) |
| Thrust disk thickness | 4 (mm) |
| Configuration of GFTBs | Single side and clamped rotor |
| Initial position of the thrust disk | 10 microns from the top surface of bottom GFTB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, T.-Y.; Wang, P.-J. Simulation and Experimental Verification of Dynamic Characteristics on Gas Foil Thrust Bearings Based on Multi-Physics Three-Dimensional Computer Aided Engineering Methods. Lubricants 2022, 10, 222. https://doi.org/10.3390/lubricants10090222
Yu T-Y, Wang P-J. Simulation and Experimental Verification of Dynamic Characteristics on Gas Foil Thrust Bearings Based on Multi-Physics Three-Dimensional Computer Aided Engineering Methods. Lubricants. 2022; 10(9):222. https://doi.org/10.3390/lubricants10090222
Chicago/Turabian StyleYu, Tai-Yuan, and Pei-Jen Wang. 2022. "Simulation and Experimental Verification of Dynamic Characteristics on Gas Foil Thrust Bearings Based on Multi-Physics Three-Dimensional Computer Aided Engineering Methods" Lubricants 10, no. 9: 222. https://doi.org/10.3390/lubricants10090222